
Figure 3.
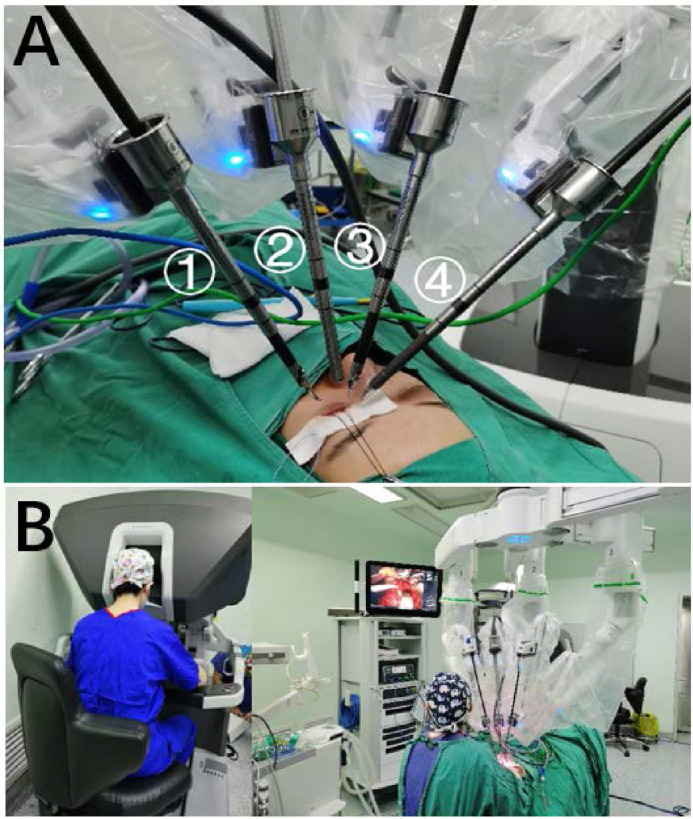
Work mode of da Vinci Xi. Robotic arm 1 was equipped with a curved bipolar dissector (da Vinci Xi 470344) and, respectively, 2: the 8-mm 0° endoscope (da Vinci Xi 470026), 3: Black Diamond micro-forceps (da Vinci Xi 470033), and 4: monopolar curved scissor (da Vinci Xi 470179). Arm 2 was approximately vertically placed above the eye. Arms 1 and 3 were placed in a bilateral symmetry, both with an angle of about 30° from arm 2. Arm 4 was on the far side, with an angle of about 60° from arm 2. The mean distance from the trocar to the eye was 10.15, 10.25, 10.25, and 10.4 cm for arms 1 to 4, respectively (A). The surgeon was seated in front of the robot console, away from the operating table, where one assistant was needed to cooperate with the robot (B).