
Fig. 1.
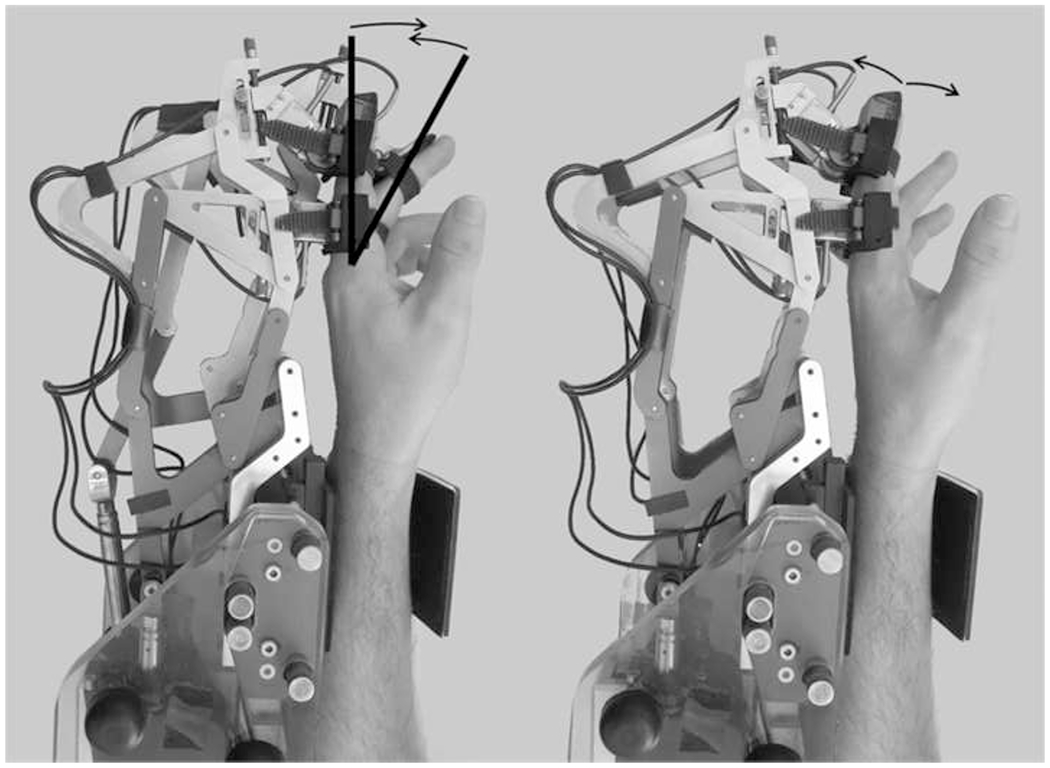
FINGER robot with two 8-bar finger curling mechanisms and two actuators that allow for naturalistic grasping motions by controlling the angle and position of the proximal phalanx and the position of the middle phalanx. The index and middle fingers attach to the robot and are guided through crisscross finger movements during the proprioception tasks; movement stops and reverses directions when fingers are separated at 30% of range of motion (defined by bold lines)