
Figure 17. Magnetic actuation and manipulation platforms based on permanent magnets.
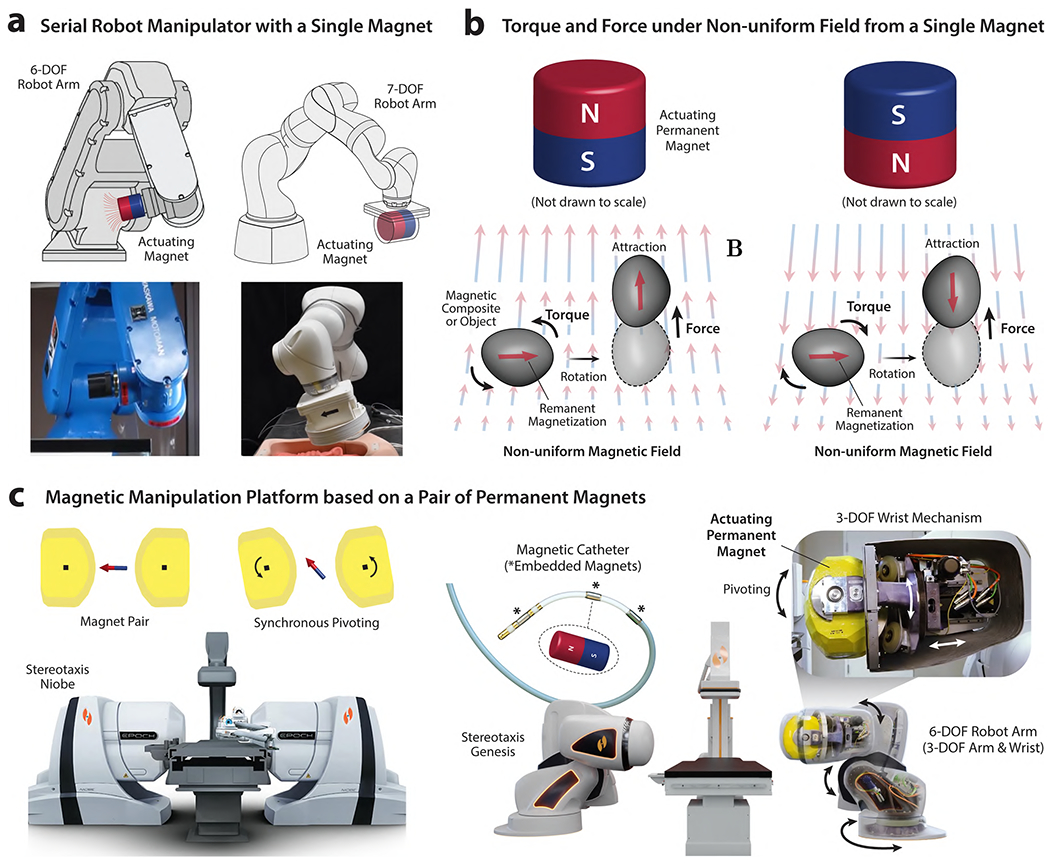
(a) Multi-DOF serial robot manipulators with a single actuating magnet attached at the end for steering untethered or tethered magnetic devices. (b) Magnetic torque and force on a hard-magnetic object in spatially nonuniform fields from a single actuating magnet. (c) Stereotaxis Niobe and Genesis platforms based on a pair of large permanent magnets for steering magnetic catheters by changing the applied field direction through synchronous pivoting of the actuating magnets. Panel (a) reproduced with permission from refs 243 and 249. Copyright 2016 SAGE Publications and 2019 American Association for the Advancement of Science.