
Figure 19. Magnetic actuation and manipulation platforms based on electromagnets.
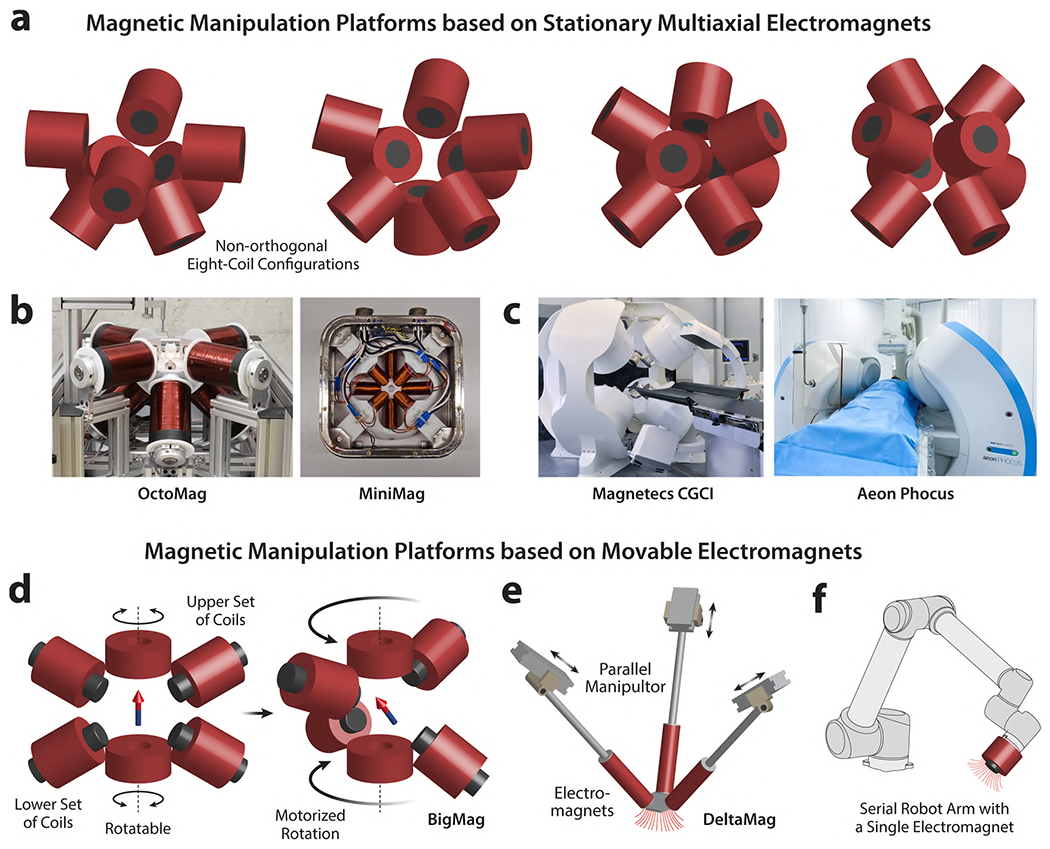
(a) Representative examples of magnetic actuation and manipulation platforms based on stationary multiaxial electromagnets in nonorthogonal eight-coil configurations258,295 and commercially available systems for (b) table-top296–298 and (c) human-body scales. Magnetic manipulation platforms based on movable electromagnets: (d) motorized actuation of rotatable electromagnets168,300 and (e) a parallel297,298 or (f) a serial303–306 robot manipulator for controlling the position and orientation of the actuating electromagnet in the workspace. Photo on the right in panel (b) reproduced with permission from ref 298. Copyright 2014 Springer Nature.