
Figure 20. Small-scale untethered soft robots based on magnetic soft materials.
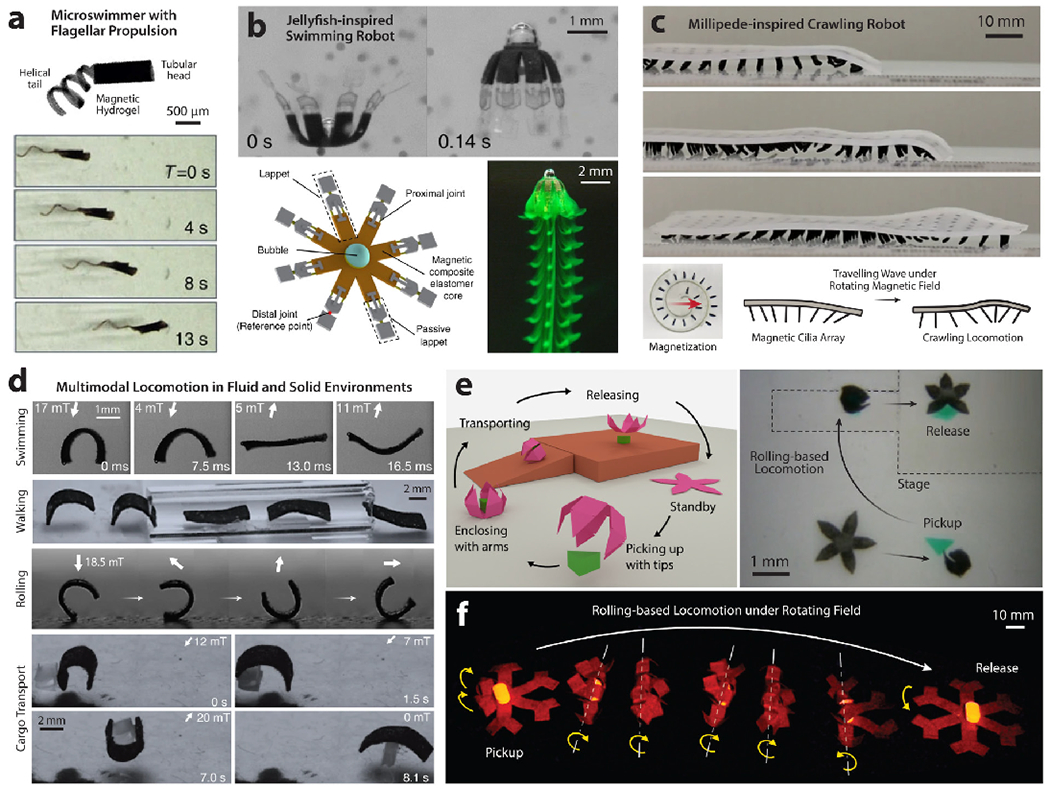
(a) Microswimmer based on magnetic hydrogel mimicking the helical propulsion of bacterial flagella under rotating magnetic fields. (b) Bioinspired magnetic soft robots based on hard-magnetic soft composites mimicking the swimming motion of a jellyfish under alternating magnetic fields. (c) Millipede-inspired crawling robot with an array of hard-magnetic cilia with different magnetization directions to produce traveling waves under a rotating magnetic field for crawling locomotion. (d-f) Magnetic soft robots based on hard-magnetic composites exhibiting multimodal locomotion such as swimming, walking, and rolling in fluid/solid environments as well as cargo transport through spatiotemporal control of the actuating magnetic fields. Panel (a) reproduced with permission from ref 200 (Copyright 2016 Springer Nature); panel (b) from ref 167 (Copyright 2019 Springer Nature); panel (c) from ref 159 (Copyright 2020 Springer Nature); panel (d) from ref 166 (Copyright 2018 Springer Nature); panel (e) from ref 178 (Copyright 2019 American Association for the Advancement of Science); and panel (f) from ref 156 (Copyright 2018 Springer Nature).