
Figure 4.
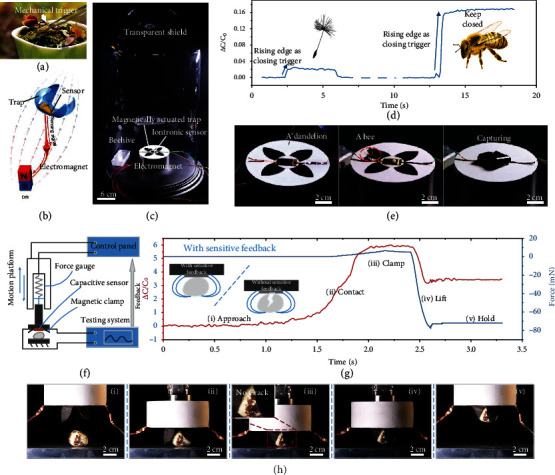
Intelligent autonomous system using the sensor as the sensory and feedback window. (a) Images of the Venus flytrap and the leaf closure triggered by mechanical stimuli. (b) Schematic diagram of the biomimetic Venus flytrap sensing the stimuli and closing the trap. (c) Self-built experimental flying object automatic capture device. (d) Capacitance response used as the feedback signal for automatically capturing objects. (e) Biomimetic Venus flytrap passively capturing a dandelion and a bee, respectively, that fall on its surface. (f) Schematic diagram of the active intelligent grabbing system. (g) Capacitance and force change during the process of the gripper successfully grabbing a quail egg without any damage, inset showing the nondestructive grabbing of quail egg under ultra-sensitive feedback compared with that without sensitive feedback. (h) Showcase of grabbing process.