
Fig. 1. Artificial intelligence (AI)-powered multimodal sensing robotic system (M-Bot) based on a fully-printed soft human-machine interface.
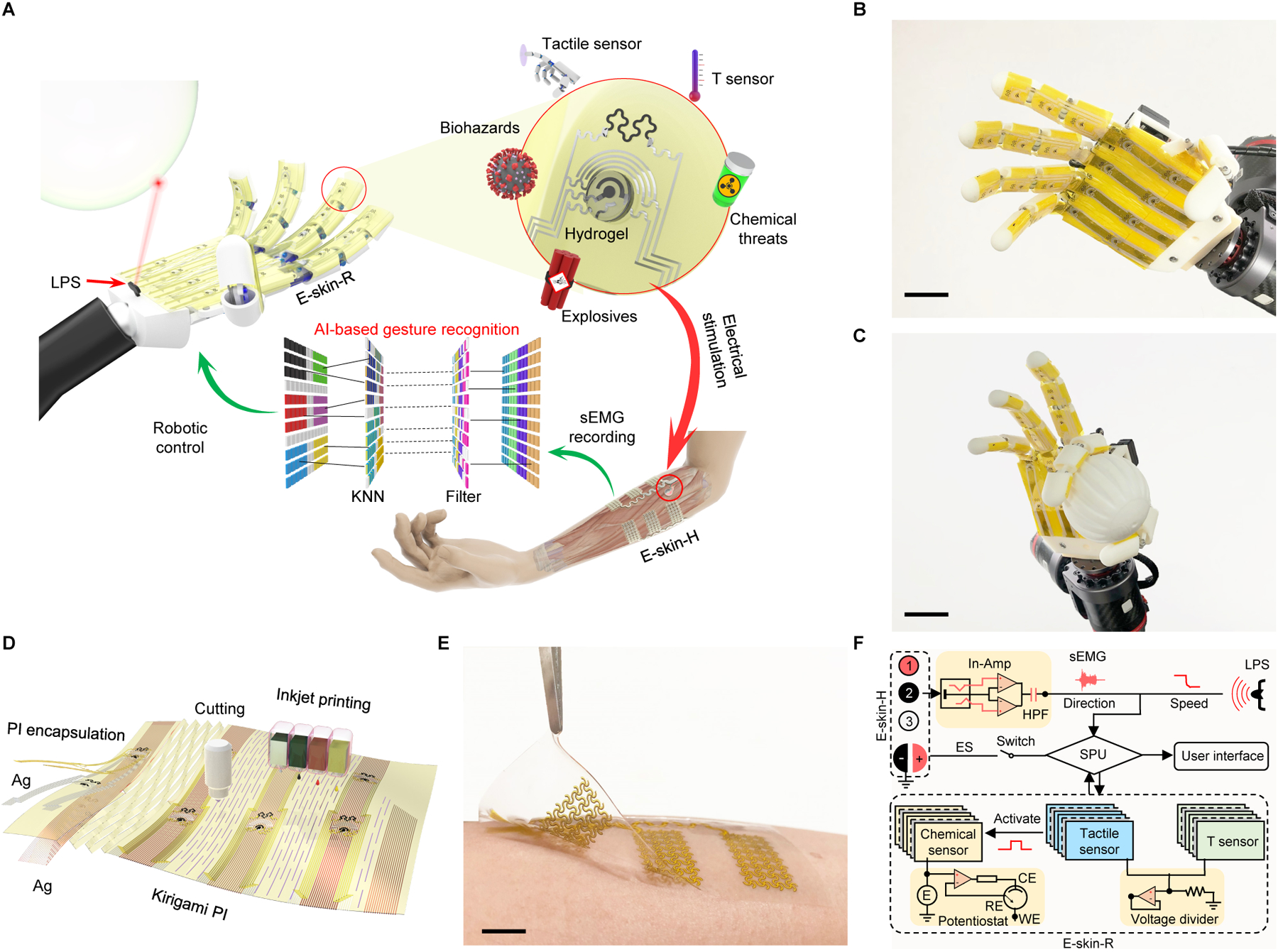
(A) Schematic of the M-Bot that contains a pair of fully-printed soft electronic skins (e-skins): e-skin-H (interfacing with the human skin) and e-skin-R (interfacing with the robotic skin) for AI-powered robotic control and multimodal physicochemical sensing with user-interactive feedback. LPS, laser proximity sensor; sEMG, surface electromyography; T, temperature; KNN, K-nearest neighbors algorithm. (B and C) Photographs of the robotic skin-interfaced e-skin-R consisting of arrays of printed multimodal sensors. Scale bars, 3 cm. (D) Schematic illustration of rapid, scalable, and cost-effective prototyping of the kirigami soft e-skin-R using inkjet printing and automatic cutting. PI, polyimide. (E) Photograph of the human skin–interfaced soft e-skin-H with arrays of sEMG and feedback stimulation electrodes. Scale bar, 1 cm. (F) Schematic signal-flow diagram of the M-Bot. In-Amp, instrumentation amplifier; HPF, high-pass filter; E, applied voltage; ES, electrical stimulation; SPU, signal processing unit. WE, CE, and RE represent working, counter, and reference electrodes of the printed chemical sensor, respectively.