
Fig. 4. Evaluation of the M-Bot in human-interactive robotic physicochemical sensing.
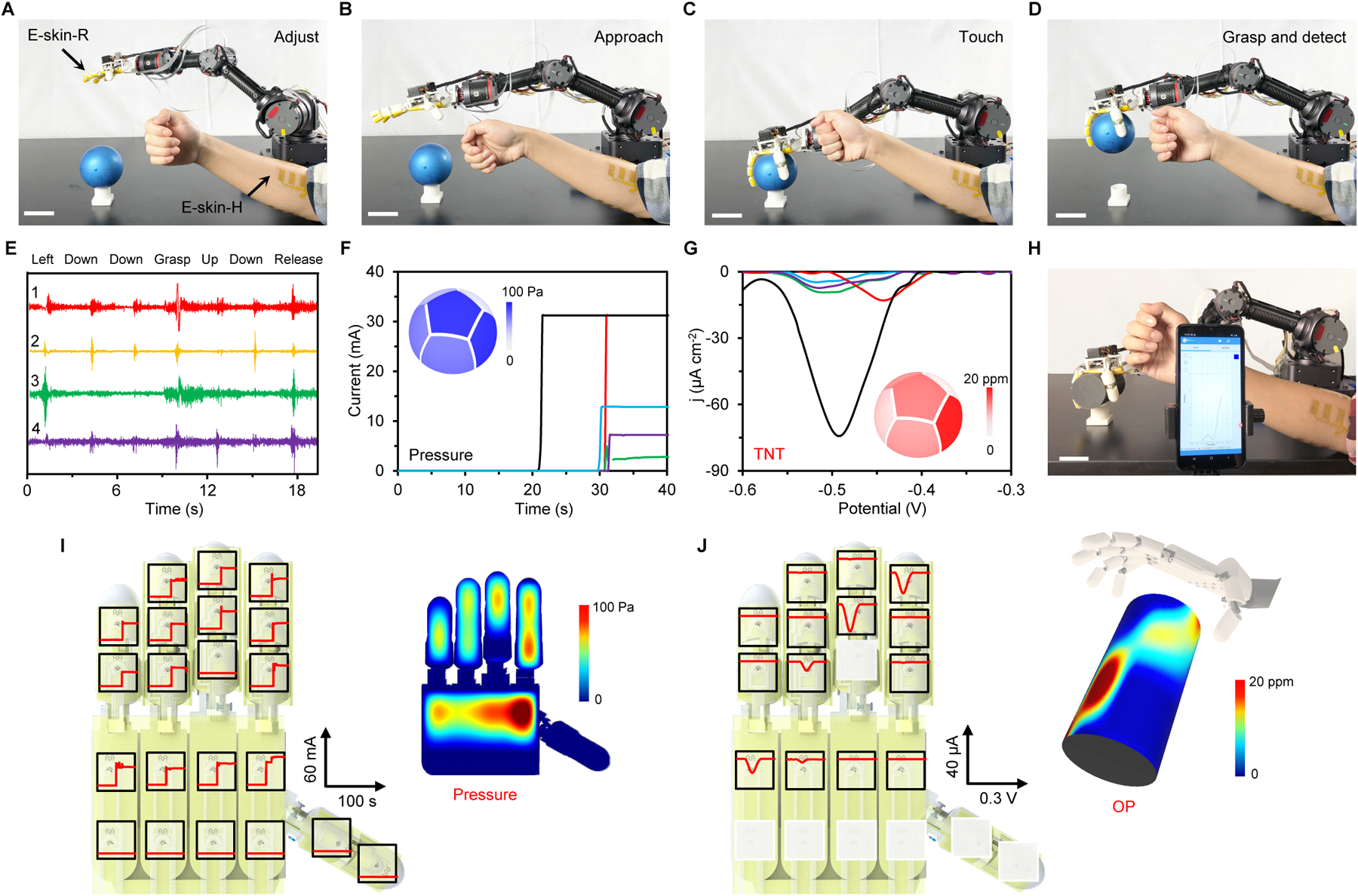
(A–D) Time-lapse images of the human-interactive robotic control for object grasping and on-site TNT detection. Scale bars, 5 cm. (E–G) The sEMG data collected in real time, which allow the robotic hand to approach and grasp a spherical object (E) and the corresponding tactile (F) and TNT (G) sensor responses. Insets in F and G, colored mapping of pressure and TNT distributions on the object. (H–J) Photograph of the robotic OP sensing on a cylindrical object (H) and the corresponding responses of the tactile sensors (I) and OP sensors (J) on an e-skin-R. Insets in I and J represent the color mappings of pressure and OP distributions on the object. Scale bar, 5 cm.