
Fig. 5. Evaluation of the-skin-R in an autonomous multimodal sensing robotic boat (M-Boat).
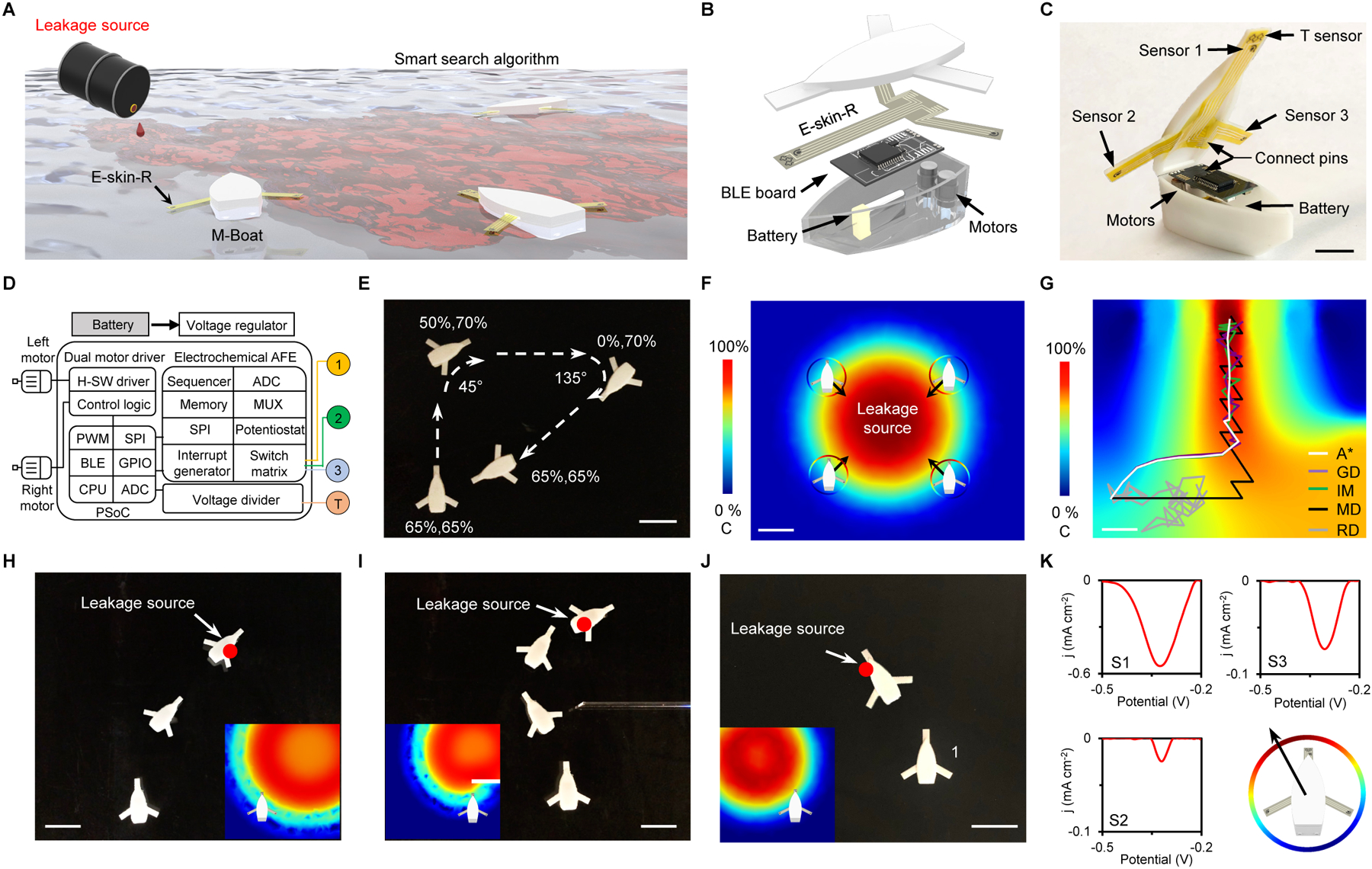
(A) Schematic of the intelligent M-Boat integrated with a printed multimodal e-skin-R sensor array that can perform temperature and multiplexed chemical sensing for autonomous source tracking. (B and C), Schematic (B) and photograph (C) illustrating the assembly of the M-Boat components. (D) System block diagram of the M-Boat for autonomous propulsion, sensing, and signal processing. ADC, analog-to-digital converter; AFE, analog front-end; BLE, Bluetooth low energy; CPU, central processing unit; GPIO, general-purpose input/output; H-SW, H-bridge software; MUA: multiplexer; PWM, pulse width modulation; SPI, serial peripheral interface. (E) Wireless control of the M-Boat. (F) Simulated distributions of a hazardous chemical (OP) leak and the algorithm used by the M-Boat for autonomous source tracking. C, concentration. (G) Simulation comparison of different search algorithms used by the M-Boat for intelligent source tracking. GD, gradient descent; IM, interpolated map; MD, max direction; RD, random direction. (H and I) Time-lapse images showing example demonstrations of the M-Boat enabled autonomous source tracking. Insets, simulated target (proton from corrosive acid) distributions. Scale bars, 5 cm. (J and K) Time lapse images (J) and the nDPV voltammograms collected at location 1 (K) for autonomous decision-making and chemical threat (OP) source tracking using an M-Boat. Insets, simulated OP distribution. Scale bar, 5 cm.