
Figure 3.
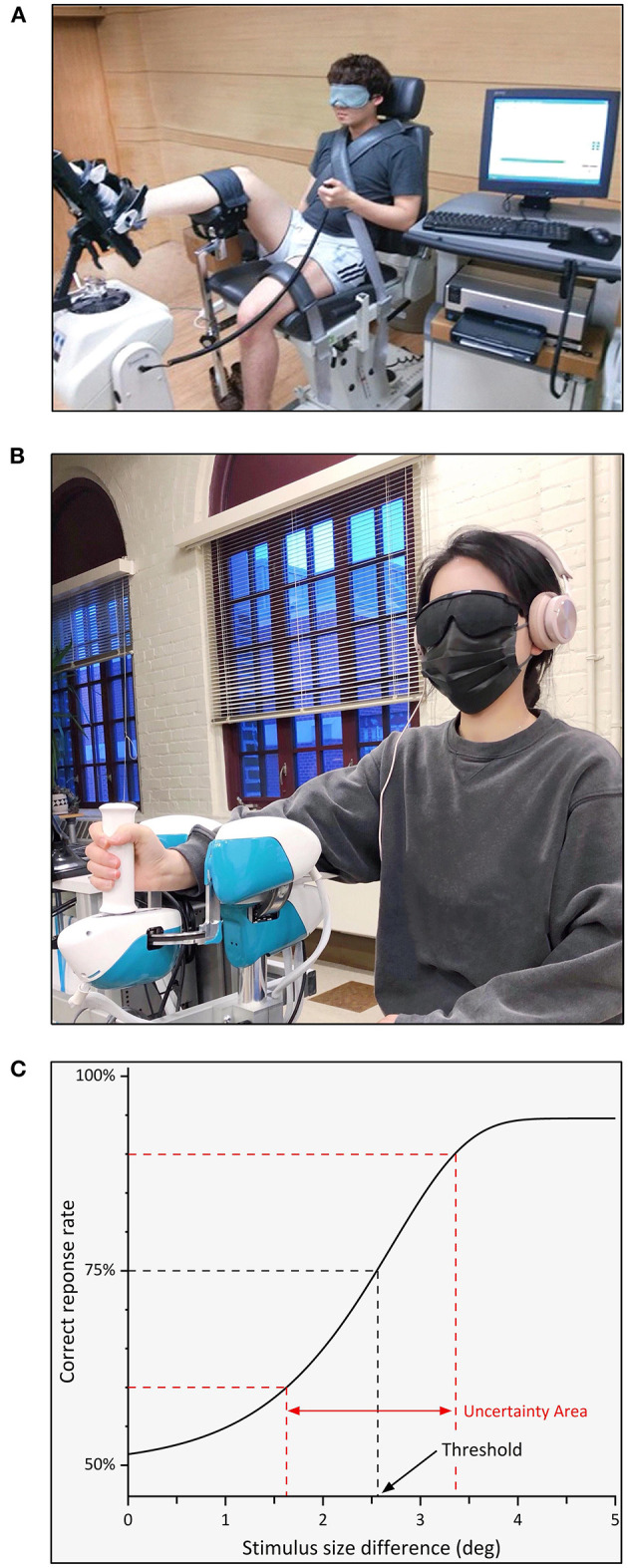
Two examples of an experimental setup to obtain proprioceptive outcome measures and position sense discrimination threshold estimation based on participant responses. Visual and acoustic stimuli are typically blocked during these assessments. (A) An ipsilateral ankle joint matching task uses modified isokinetic device. The ankle is passively rotated by the device to a target position. In a second displacement participants stop the passive motion when they perceive to have reached the previous position (20). (B) A robotic device that passively displaces the wrist joint during a joint position discrimination task. The robot rotates the wrist in two consecutive trials from a neutral to a standard or a comparison position. The participant verbally responds to which position is further away from the neutral position. (C) Using verbal responses and experienced proprioceptive stimuli as inputs, a proprioceptive acuity function is fitted. The corresponding joint position sense discrimination threshold reflects the 75% correct response rate. The uncertainty area between the 60-90 percentiles is a measure of precision, reflecting a person's reliability in making consistent perceptual judgments.