
Figure 2.
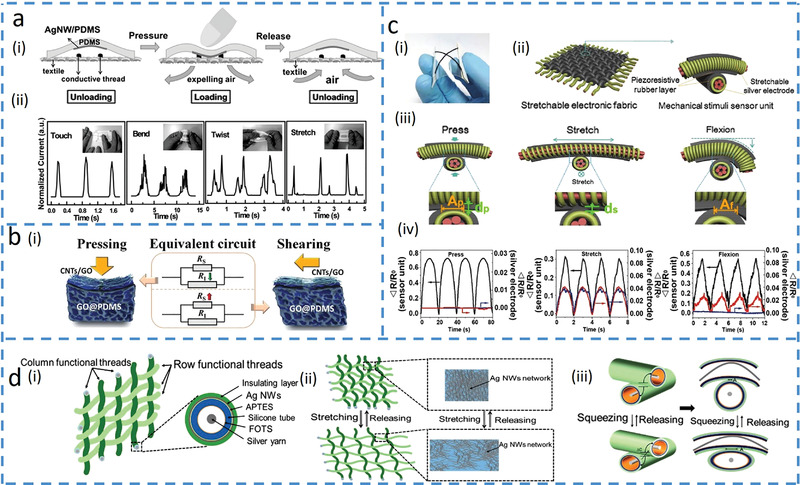
Asynchronous signal discrimination methods. a) Cloth‐based electronic skin (E‐skin) outputs different signal patterns under various forces. Reproduced with permission.[ 24 ] Copyright 2016, Wiley‐VCH. i) Schematics of the cloth‐based sensor under pressure. ii) Changes in the relative current waveforms with various mechanical stimuli. b) Normal‐tangential force sensor with opposite resistance response. Reproduced with permission.[ 27 ] Copyright 2018, Wiley‐VCH. i) Schematics of the sensor deformations upon normal pressure and lateral shear force. ii) Equivalent circuits, where R S represents the resistance of the surface sublayer‐carbon nanotubes (CNTs)/graphene oxide (GO), and R I represents the resistance of the inner sublayer‐GO/PDMS. c) Electronic fabric artificial skin that measures pressure, strain, and flexion by a combined analysis of different output signals from multiple electrodes. Reproduced with permission.[ 35 ] Copyright 2015, Wiley‐VCH. i) Optical image of a sensor unit on a polyethylene terephthalate substrate. ii) Illustration of fibrous E‐skin and a single sensing unit. iii) The deformation at the contact point of the sensor unit with applied pressure, stretching, and flexion. A p and d p are the contact area and thickness with applied pressure, d s is the thickness under stretching, and A f is the contact area under flexion. iv) Changes in the relative resistances of the three electrodes over time for repeated pressure, strain, and flexion loadings. d) Multifunctional woven tactile sensor array. Reproduced under the terms of the Creative Commons CC BY License.[ 34 ] Copyright 2017, The Authors, published by MDPI. i) Structural demonstration of the multifunctional woven sensor. ii) Schematic of the inner silver layer at resistant sensing mode for measuring strain. iii) Schematic illustration of the capacitor for pressure detection.