
Figure 2.
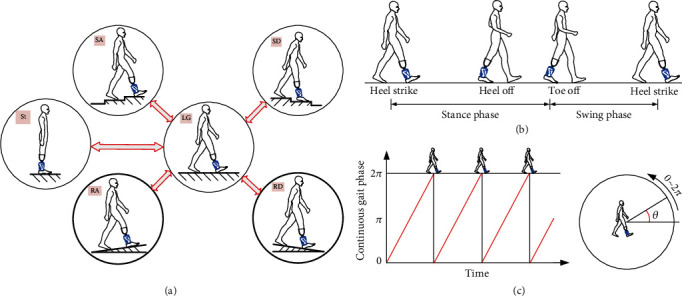
The recognition tasks for lower-limb prosthesis. (a) Some locomotion modes and transitions between them. The blue parts denote the robotic transtibial prostheses, and the two-way arrows denote transitions between the two locomotion modes. (b) Several gait events in one gait cycle: heel strike, heel off, toe off and, next heel strike. (c) The continuous gait phase (from 0 to 2π rad) in one gait cycle.