
Figure 1.
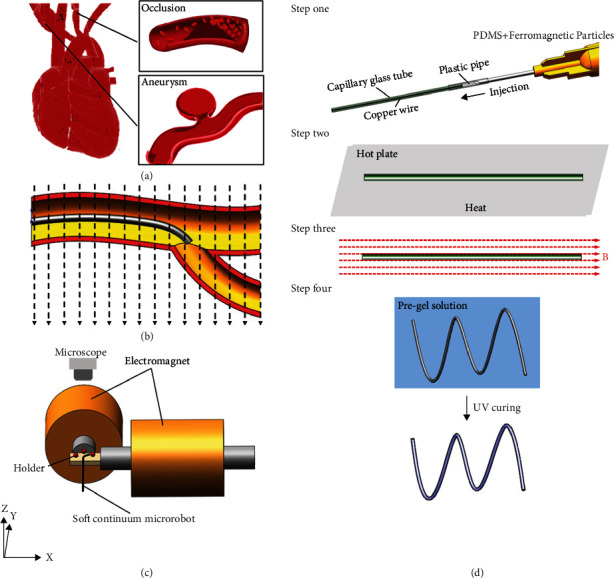
The schematic diagram of the magnetically driven soft continuum robot. (a) The intravascular disease in hard-to-reach areas where the soft continuum microrobot can be utilized. (b) The schematic of the steering of the soft magnetic microrobot in the cardiovascular system. (c) The schematic of the magnetic manipulation system. (d) Fabrication methods based on injection molding. Step one: injection molding; step two: heating for solidification; step three: magnetization; step four: forming the hydrogel skin.