
Figure 4.
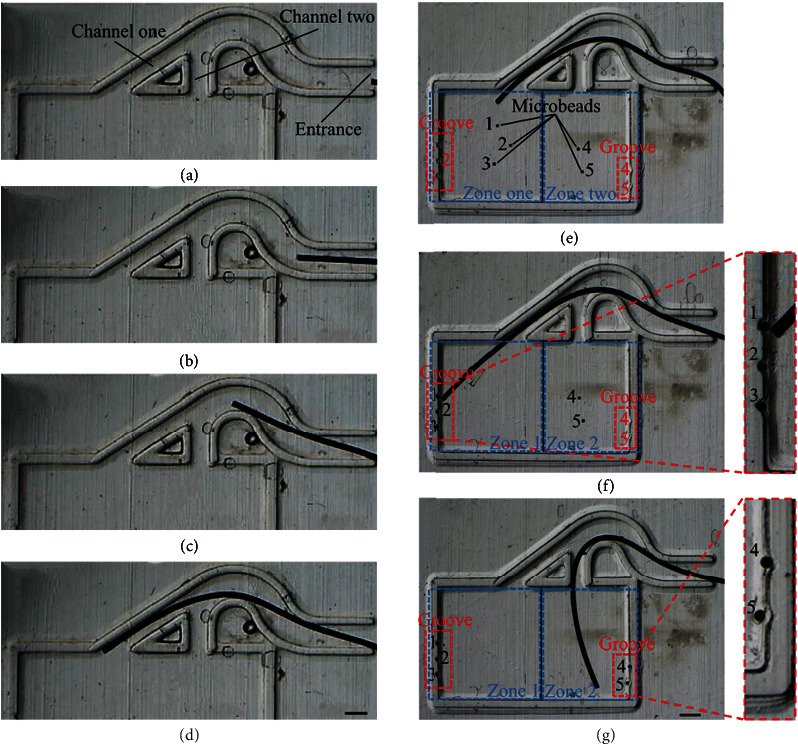
Experiments through a microfluidic channel and manipulating microbeads. (a) The soft continuum microrobot arrived at the entrance. (b–d) The process of travel based on magnetic steering capability. (d) The soft continuum microrobot entered the workspace. (e) Initialization: the soft continuum microrobot entered the workspace through a microfluidic channel. (f) Three microbeads were pushed into the desired location. (g) Five microbeads were pushed into the desired location. The scale bar represents 500 μm.