
Figure 11.
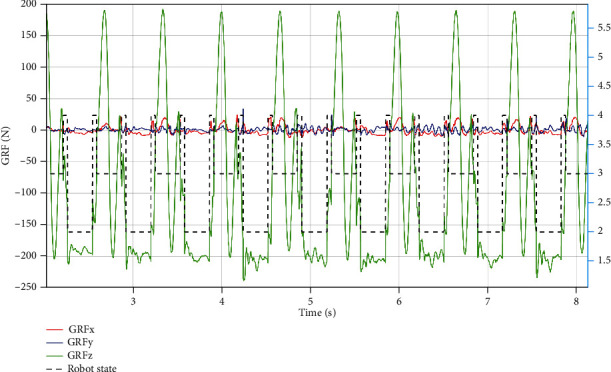
Up-slope experiment data of front left leg. The red, blue, and green lines present the GRF; black dotted line is the robot state. The values of 1, 2, 3, and 4 are flag variables which can be got by the state machine based on the combine of event-based (force sensor) and time-based (planning). We divided the robot state into 4 states: four leg supporting phase, two double leg supporting phase, and air phase. The value of 4 denotes the four-leg supporting phase, 2 and 3 denote diagonal double leg supporting phase, and 1 denotes air phase.