
Figure 5.
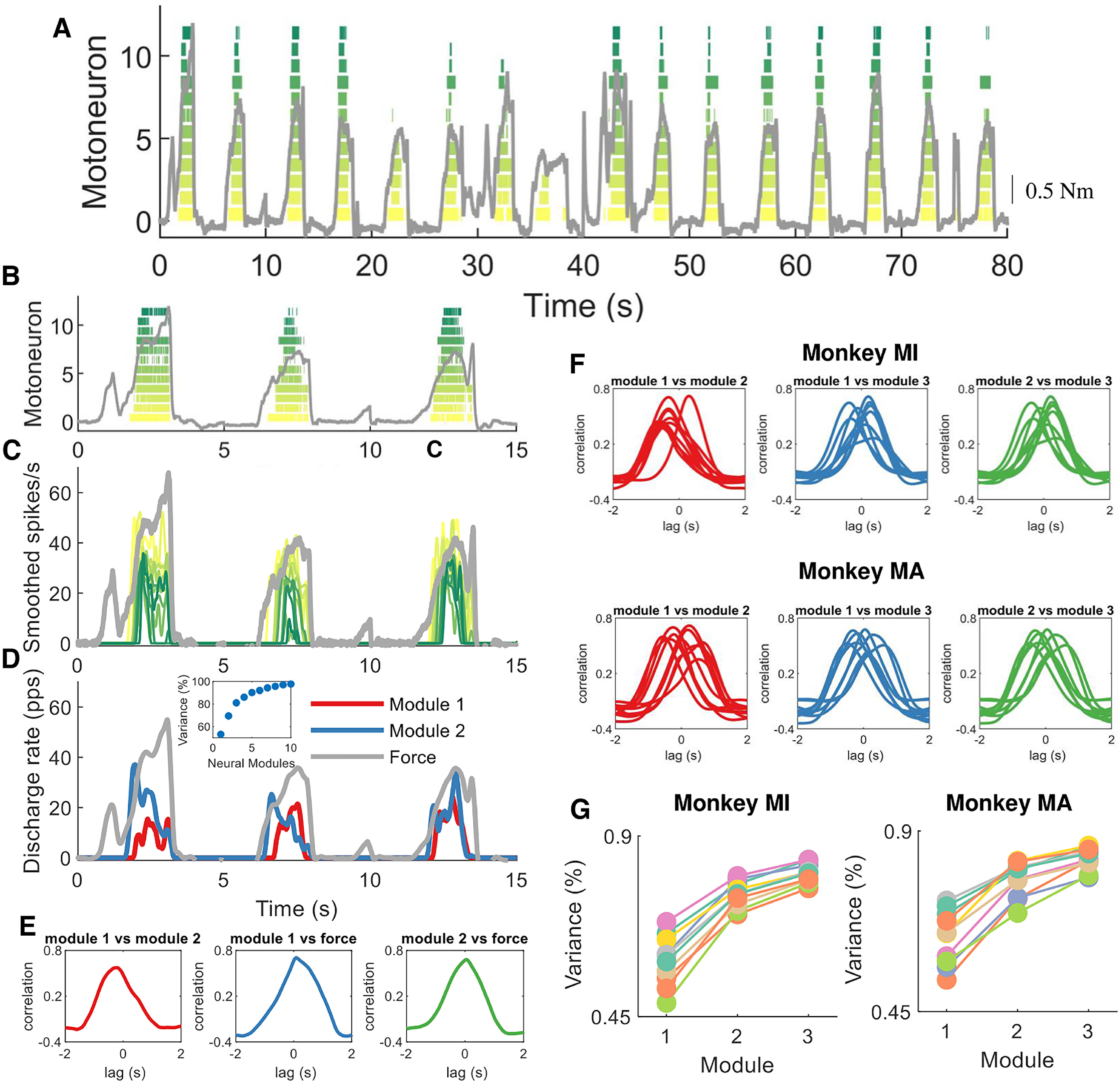
Encoding of muscle force by motor units. We aimed at decoding and encoding the temporal motor unit information into components by non-negative matrix factorization. A, Raster plot of 12 motor units during a subset of macaque voluntary isometric contractions (gray lines indicate the torque signal). Note the variability in peak forces and the rate of force developments. B–D, The first three contractions in A. C, The motor unit spike trains in B were convoluted with a 2.5 Hz Hanning window. Note the high correlation between the motor unit smoothed discharge rates and muscle force. D, We applied the reduction dimensionality technique non-negative matrix factorization. We constrained the model to learn the components in the motor unit discharge rates up to 10 factors. In this example, the two modules that together explained ∼80% of the variance are shown. Note that these two modules are highly correlated, and time shifted. The inset in D shows the reconstruction accuracy (variance percentage) of the neural modules with respect to the original signal (smoothed motor unit discharge rates). E, We applied cross-correlation analysis between the modules and muscle force. This example shows the correlation between the first module and the second module as well with voluntary force. F, The same method was then applied for the three modules in both monkeys. Note the high correlation across all days and for both monkeys. Moreover, there was always one module with a dominant component (the lag between the different modules was never zero). G, This indicates that there is only one component constrained by the size principle, since the motor unit recruitment thresholds are highly preserved across all contractions. The reconstruction accuracy (variance percentage) is explained across the 10 d for both monkeys.