
Figure 2.
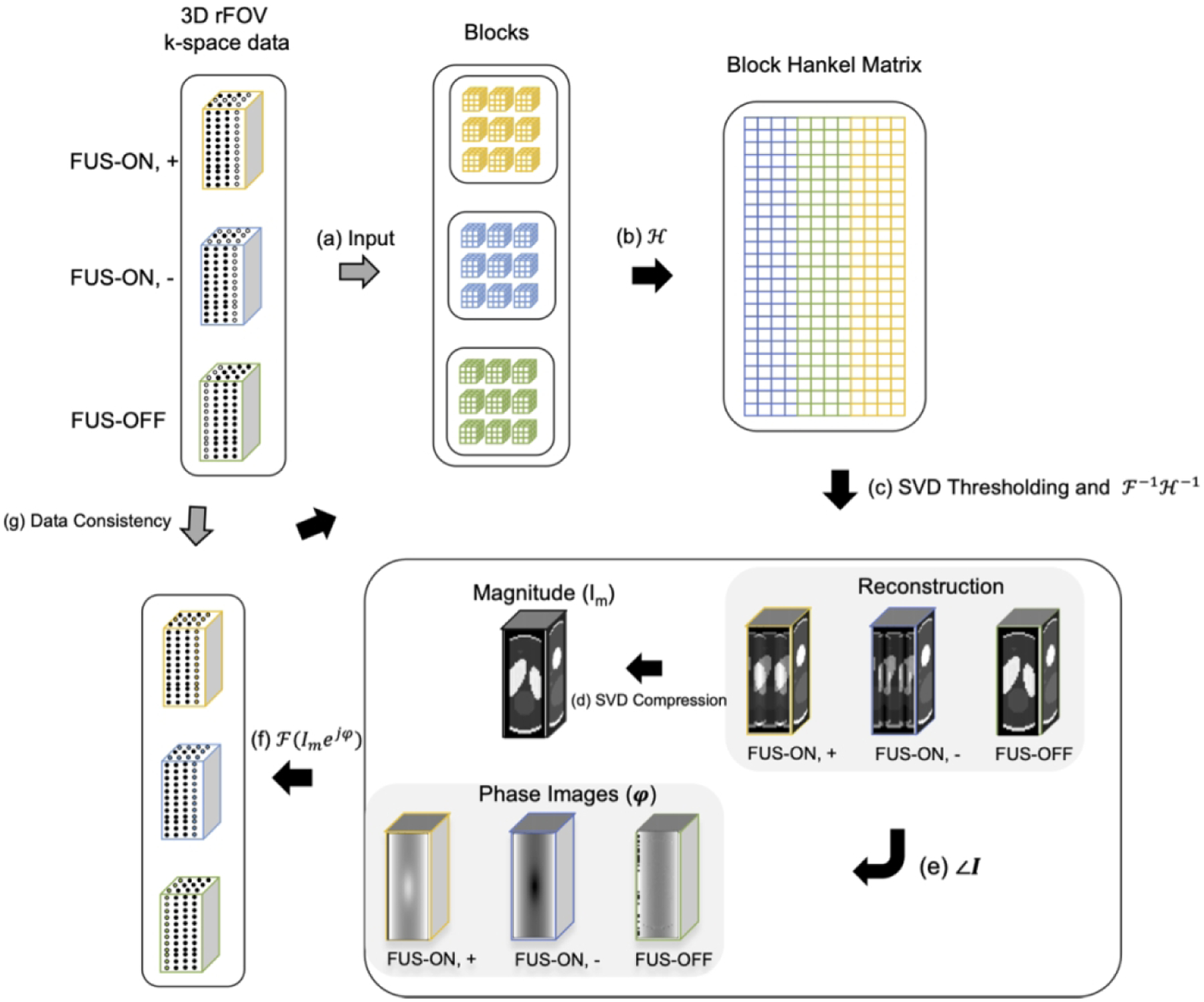
Flowchart of Low-rank image reconstruction. Step a - b: At each iteration, the k-space datasets for the three images are segmented into blocks that are stretched to form a Block Hankel matrix; Step c: That matrix is singular value-thresholded and converted back to estimated images; Step d - f: One magnitude image Im was calculated by taking the first singular component of SVD of three images (FUS ON, +; FUS ON, −; FUS-OFF) and then was applied to replace the magnitudes of the current image estimates with unchanging phases; Step g: The originally acquired k-space data were reinserted into the recovered data to enforce data self-consistency.