
Figure 1.
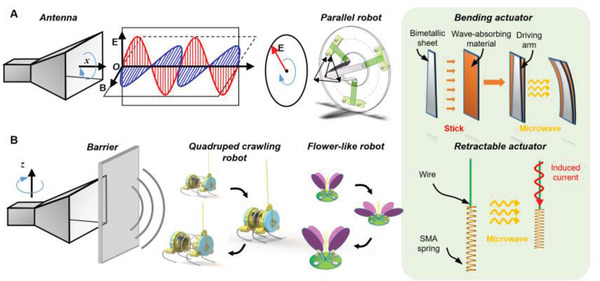
Microwave‐driven robots with two different motion forms. A) Schematic diagram of the microwave‐driven‐parallel robot with bending actuators powered and controlled by ambient microwaves. By rotating the horn antenna around the x‐axis to control the polarization direction of the ambient microwave, the received microwave power of each bending actuator can be adjusted. B) Schematic diagram of the quadruped robot and flower‐like robot with retractable actuators activated by ambient microwave. The on–off control of the robots can be achieved by rotating the horn around the z‐axis or adjusting the polarization direction of the microwaves.