
Figure 5.
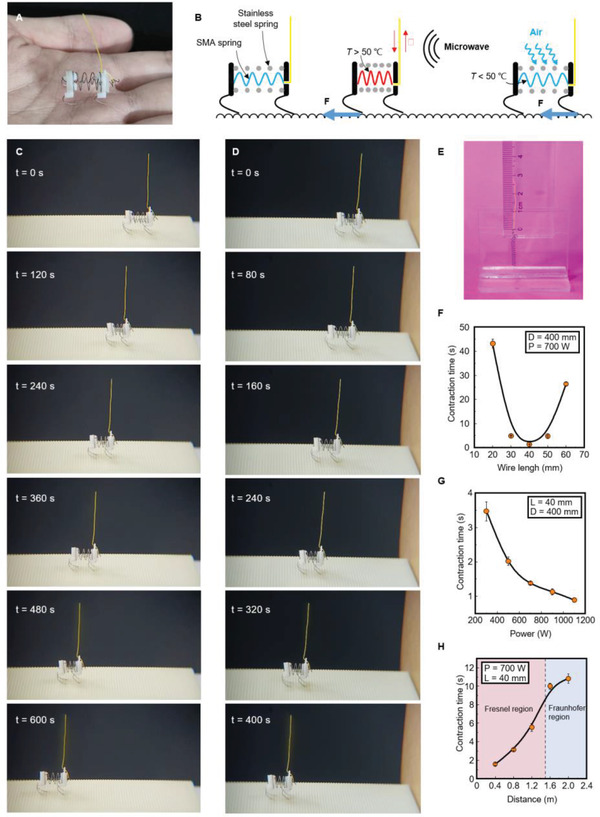
Quadruped crawling robot based on a retractable actuator. A) Photo of insect‐scale quadruped crawling robot based on retractable actuator. The robot is 15 mm long and weighs only 0.42 g. B) Schematic showing the principle of quadruped robot. C) Photographic sequence of the quadruped robot crawling on an undulation surface powered by ambient microwaves with P = 700 W, D = 400 mm. D) Sequence of image showing the crawling process of the quadruped robot behind an obstacle (cardboard box characterized by 130 mm × 130 mm × 65 mm) with P = 700 W, D = 400 mm. E) Image showing the retractable actuator composed of a wire and an SMA spring in series. F) Contraction time of the SMA spring versus the wire length under microwaves with P = 700 W, D = 400 mm. G) Relationship between contraction time of the SMA spring and the transmitting power P of the microwave. H) Contraction time of the SMA spring as a function of distance D between retractable actuator and the wave port. Error bars in (F to H) represent the SD of the averaged values from six measurements. There is an interval of 30 s for air cooling between two adjacent groups of experiments.