
Figure 12.
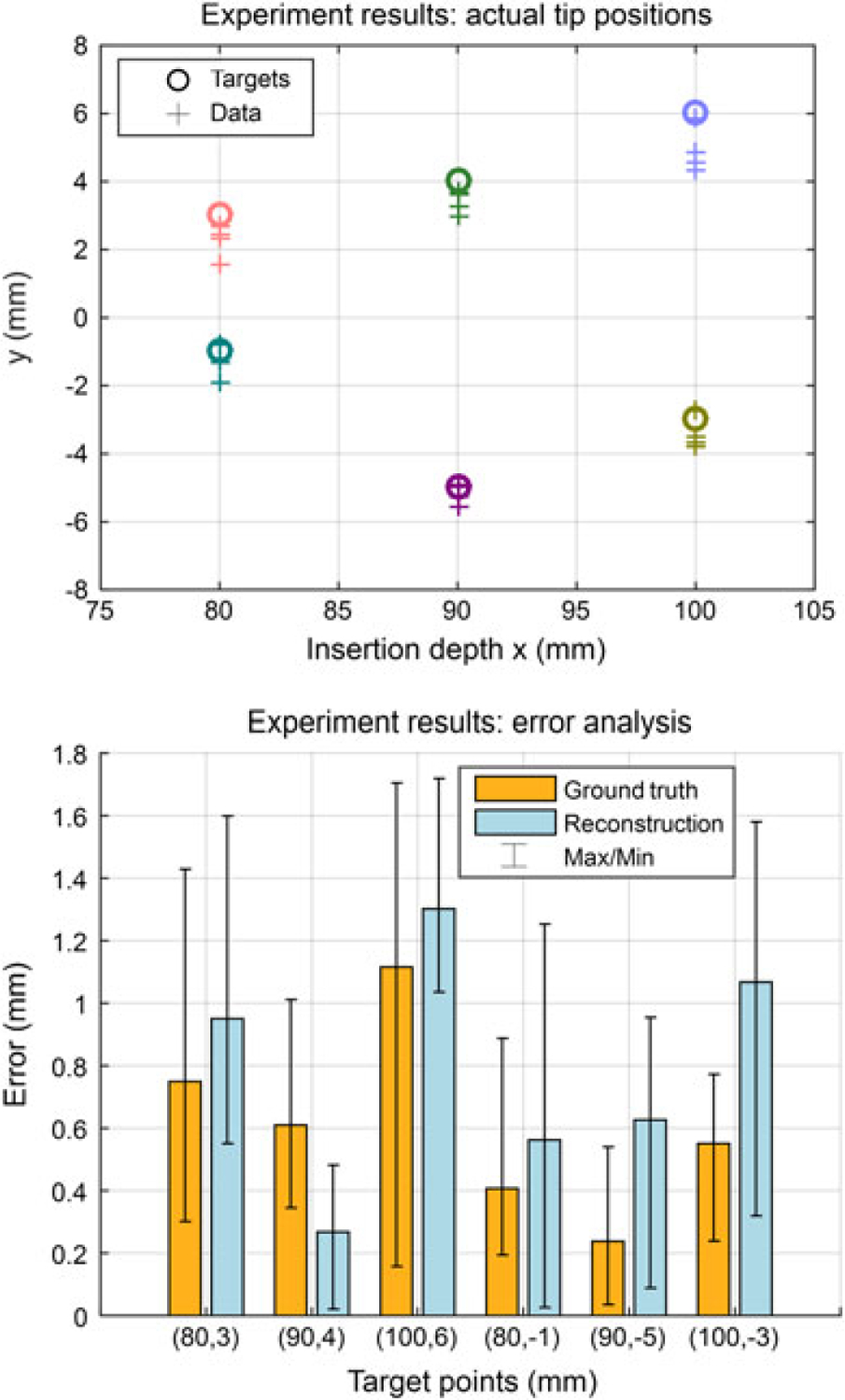
Results of multilayer needle insertion experiments. (a) Six targets are located at 80–100 mm depths and the distribution of the final needle tip position captured by the camera. Different colors illustrate different targets. (b) The absolute tip positioning errors in camera images (ground truth) and reconstructions. The maximum errors are 1.70 mm and 1.72 mm, respectively. The overall average errors are 0.61 ± 0.45 mm and 0.80 ± 0.52 mm, respectively