
Fig. 3. Filtering with quasi-continuous time angular observations.
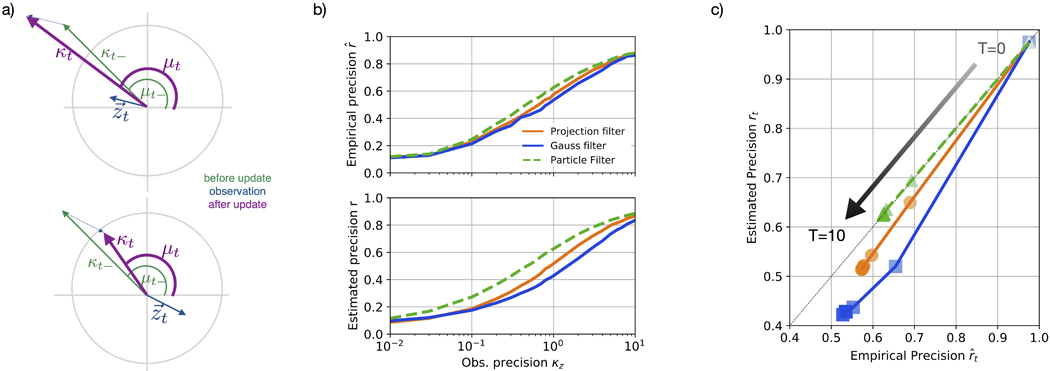
a) Single quasi-continuous time update step (68) with angular observation zt, where the length of the vector indicates observation reliability . The update step for Bayesian inference on the circle is equivalent to a vector addition in the 2D plane. The lower panel demonstrates that a conflicting observation leads to a decreased certainty of the estimate directly after the update, corresponding to a shorter vector. b) Empirical precision (upper panel) and estimated precision rt of the circular Kalman filter (circKF) and a Gaussian projection filter (Gauss filter), when compared to a particle filter, for different values of the observation precision κz at time . Parameters were and , times are in units of . c) Estimated versus empirical precision up to for the different filters at . The precisions shown in b) and c) are averages across 5000 simulation runs.