
Figure 1.
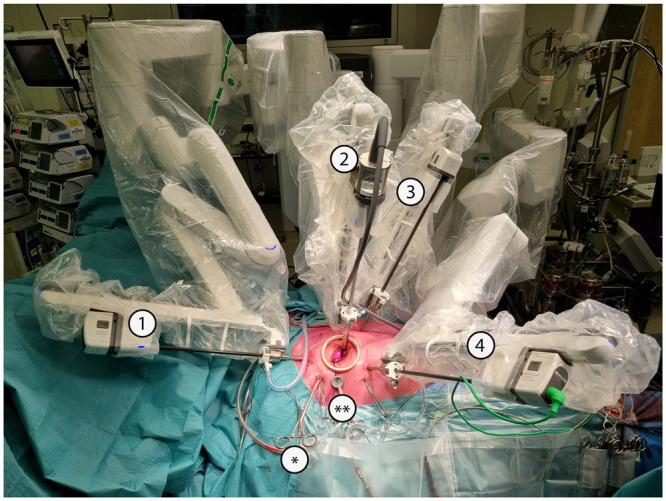
Robotic system (Intuitive Da Vinci X) docked to the patient. It is important to connect all 4 arms in the direction they will move, to avoid conflict with and between other structures, both inside and outside the chest. The camera port is connected to arm number 2 (but can also be connected to any of the other arms in the newer systems) and, under endoscopic or direct visualization, surgical instruments operated by the right and left hands of the console surgeon are typically placed in arms number 1 and 4 and introduced by the patient side assistant for control by the console surgeon, depending on the system used. The atrial retractor is inserted under endoscopic vision on the remaining arm (arm number 3). * The transthoracic aortic clamp is inserted through a separate stab wound incision. ** A suction catheter to vent the left heart chambers can be inserted through the working port or via a separate port.