
Figure 14.
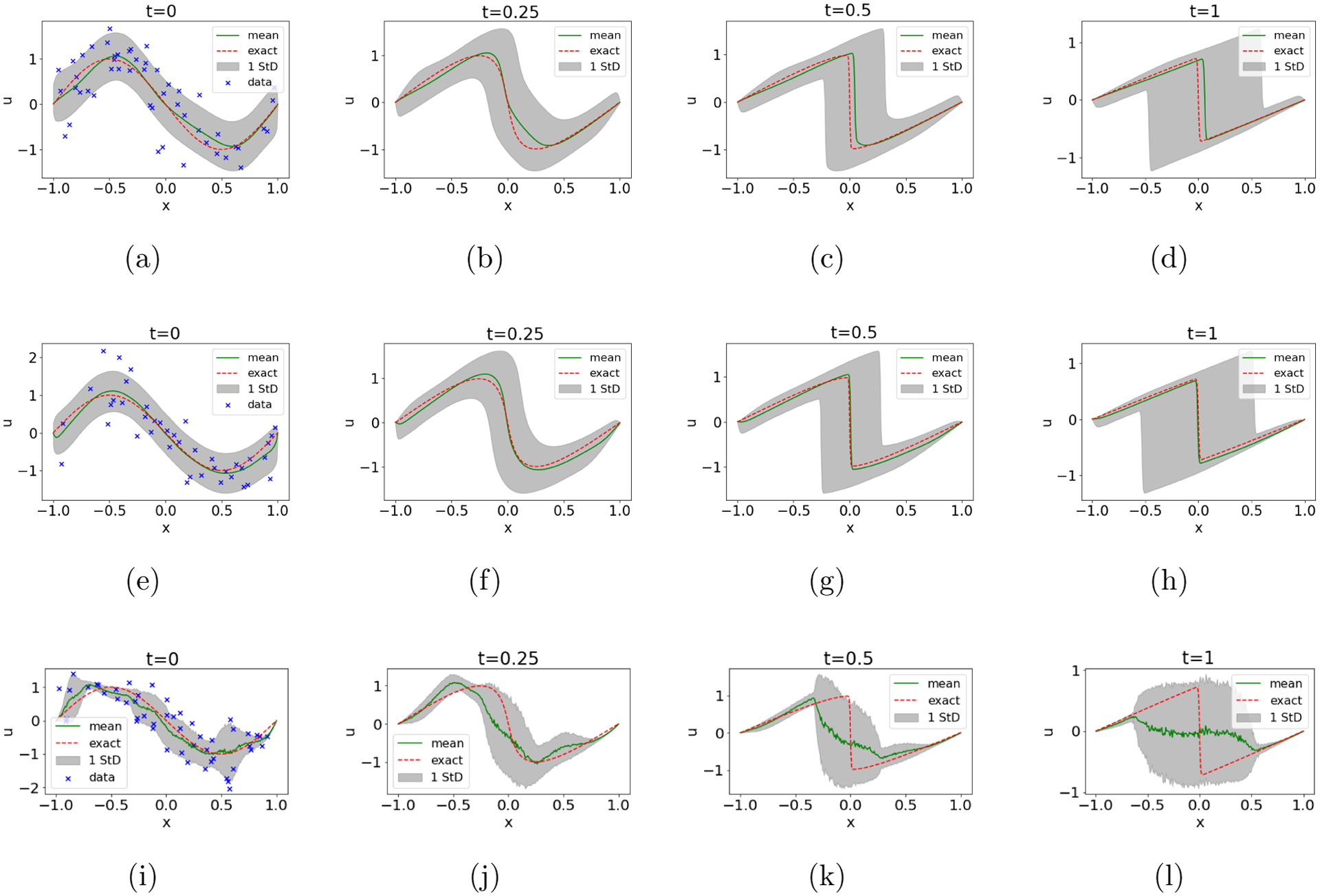
The PINN-evaluated solution to Burgers’ equation when measurements on initial timeslice is corrupted with zero-mean, Gaussian noise for GP-smoothed PINN (top), SGP-smoothed PINN (middle), and UQ-PINN 20] (bottom), at timeslices , from left to right. For the GP- and SGP-smoothed PINNs uncertainty bounds are calculated by retraining the PINN using the initial condition of the GP/SGP mean function plus or minus one standard deviation.