

Abstract
Tele-operated collaborative robots are used by many children for academic learning. However, as child-directed play is important for social-emotional learning, it is also important to understand how robots can facilitate play. In this article, we present findings from an analysis of a national, multi-year case study, where we explore how 53 children in grades K–12 (n = 53) used robots for self-directed play activities. The contributions of this article are as follows. First, we present empirical data on novel play scenarios that remote children created using their tele-operated robots. These play scenarios emerged in five categories of play: physical, verbal, visual, extracurricular, and wished-for play. Second, we identify two unique themes that emerged from the data—robot-mediated play as a foundational support of general friendships and as a foundational support of self-expression and identity. Third, our work found that robot-mediated play provided benefits similar to in-person play. Findings from our work will inform novel robot and HRI design for tele-operated and social robots that facilitate self-directed play. Findings will also inform future interdisciplinary studies on robot-mediated play.
Keywords: Human-centered computing → Empirical studies in HCI; HCI theory, concepts and models; Field studies; Accessibility technologies; Play; telerobots; social robots; learning; inclusion
1. INTRODUCTION
The importance of play in children’s social, emotional, and cognitive development is widely known [1–4]. Recently, work has explored the impact of quarantine, isolation, and other restrictive environments on play and whether play mitigates the adverse effects of such restrictions [5]. Additionally, work has been done to explore the use of robots to fight social isolation during a pandemic [6]. In the pre-pandemic world, it was estimated that 2.5 million children in the United States were restricted to their homes due to medical risk [7–9]. Sadly, with COVID-19, this number is expected rise. As communities and schools return to in-person gatherings, many children will not be able to return to in-person school due to either their own health risks or the health risks of a family member. Awareness of this global reality highlights the urgent need to explore the use of interactive technologies beyond the static screens of Zoom and online schools. As in-person schools resume, there is much we can learn from children and adolescents who pioneered the use of robots to not only attend school but also play.
Tele-operated robots have capabilities that allow children to design and create their own robot-mediated social and play experiences with human peers in traditional physical environments. These child-operated robots provide remote children with opportunities to build on their personal foundational knowledge of social interactions and experiences to create new scenarios of learning and creativity.
In our study, “play” is operationalized as a self-directed activity that (1) is intrinsically motivated, (2) entails active engagement, and (3) results in joyful discovery [10]. Prior research found that many children who are restricted to their homes remain motivated to attend school, attend social activities, and remain connected to their peers [7, 8, 11]. In this article, all robots used by participants were tele-operated and are referred to as “robots.” We report data from a national, multi-case study of children in grades K–12 who used robots to attend school.
We report data from a national, multi-case study of children in grades K–12 who used robots to attend school. The main research question guiding our national, ongoing study is, “How are tele-operated robots (telerobots) used in schools by remote children, their teachers, and classmates?” Out of 84 total cases in our national study, 53 cases were identified as reporting self-directed play activities at the time of data analysis for this article. These 53 cases were found to meet the following criteria for this study on robot-mediated play: (1) mention of using robot screen/camera for play activities, (2) mention of using robot speakers/microphone for play activities, and (3) mention of using robot body (including mobility) for play activities. The research question motivating this study on play was, “How do children use telerobots for self-directed play activities?” Data for this article were collected from 2014 to 2019 through semi-structured interviews, focus groups, and field notes.
As a subset of a larger study, data for this article consisted of cases where participants extended use of their robot to remain actively engaged in activities that were not required but were desired for informal learning and play. Play activities highlighted in this article were intrinsically motivated, displayed active engagement, and resulted in joyful discoveries on how to use robots for play.
The contributions of this article are as follows. First, we present empirical data on novel play scenarios that children created using their robots. These play scenarios emerged in five categories of play: physical, verbal, visual, extracurricular, and wished-for play. Second, we explore two unique themes that emerged from our data—robot-mediated play as a foundational support of general friendships and as a foundational support form of self-expression and identity. Third, our work found that robot-mediated play provided benefits similar to in-person play. These benefits include practice for the body, exercise for the feelings, and training for the mind comparable to in-person play experiences [12]. Understanding how children organically (i.e., self-directed) use robots to create play scenarios can inform future design of robots to facilitate collaborative and independent play experiences. Additionally, understanding how remote children use robots to engage in collaborative play for general friendships and self-expression can inform future interdisciplinary human-robot interaction (HRI) application avenues for tele- and social robots.
2. RELATED WORK
2.1. Play
Child-friendly robots have the potential to provide individualized support for remote children to engage in informal learning and play activities in physical school and community environments. Although play is difficult to define, it is considered a key aspect of human development [12]. The United Nations High Commission for Human Rights by Play highlighted that play is so important to optimal child development that it is recognized as a right of every child [13]. Clinical reports have been published on the importance of play [4, 14], and play is commonly considered as one of the most important aspects of a child’s life to be considered when assessing children’s quality of life [15, 16]. Additionally, research shows that the benefits of play are found in a mix of physical, social, emotional, and intellectual rewards at all stages of life [17–19]. As remote children are able to interact with local environments via their embodied robot, we focus on robot-mediated play scenarios that can meet these needs.
2.1.1. Play in Schools.
For children who are restricted to their homes due to medical conditions, finding opportunities to play with peers can be challenging. The risk factors that prohibit them from physically attending school are also present in having visitors physically visit their homes. These restrictions not only limit formal learning, where participation in organized activities is known to promote healthy development [20], but also cause children to miss out on valuable informal learning and development that occurs through play [21]. Play in and out of school environments affords children the opportunities to develop new competencies that may lead to enhanced abilities to resolve conflicts and learn new advocacy skills [22, 23].
In this article, we evaluate play activities that are “self-directed” because when play is child driven, children practice decision-making skills, discover their own areas of interest, and engage in environments that hold meaning for them [24]. In our study, each participant was issued a robot to attend formal learning activities and the participant extended the use of their robot to self-directed play activities.
2.1.2. Play Outside of Schools.
Extracurricular activities are one aspect of child-directed play where children are able to engage in play within informal learning environments. Play in extracurricular activities allows children to work in groups, share, negotiate, resolve conflicts, and learn self-advocacy skills [4]. In our study, children used robots to attend extracurricular activities in two different physical environments: on-campus, where the robot was already located and already connected and the environment was already accessible to the robot, and off-campus, where the robot had to be transported and connected to Wi-Fi and the child had to learn how to control the robot in a new environment.
2.2. Child-human Robot Interaction
Much research has been done on designing AI social robots to support children with cognitive and physical disabilities [25–30], sensory disabilities [31], learning disabilities [32], child development [33], and autism spectrum disorder [34–37]. Additionally, much research has been conducted more broadly on child-robot interactions [38–40], infant-robot interactions [41, 42], robots for social isolation [6], and child-computer interactions (in HCI) [43, 44]. Studies have also explored children interacting with robots for playful learning related to the associations between sounds and colors [45] and as cooperative co-players in interactive playgrounds [46].
2.3. Telepresence Robots
Earlier work has been done evaluating the use of telepresence robots by adults in offices [47–51], health care [49, 52–55], conferences [56, 57], and aging in place [47, 49, 58–60]. Recent work has also covered children using telerobots in schools [7, 8, 11, 61, 62], using a tele-operated robot with arm and gripper for learning activities [63], and using a desktop robotic agent to play “rock, paper, scissors” remotely [64].
2.4. Summary
While prior work on AI social robot systems is helpful for understanding contexts for child-robot interaction, these systems are designed, built, and frequently controlled by adults [65, 66]. Consequently, these play scenarios are directed by adults. In contrast, in our work, telepresence robots were used in a social capacity and were fully tele-operated by children for synchronous play with other children. The main purpose of the robot was to mediate communication and interaction between remote and local children. To our knowledge, this study is the first to evaluate how telepresence robots are used by remote children for self-directed play.
3. RELATED THEORY
3.1. Expectancy-value Theory
As robot-mediated play scenarios are characterized by features of expected HRI tasks, our study yields empirical evidence for the structure and impact of self-directed play activities between remote children and their local peers.
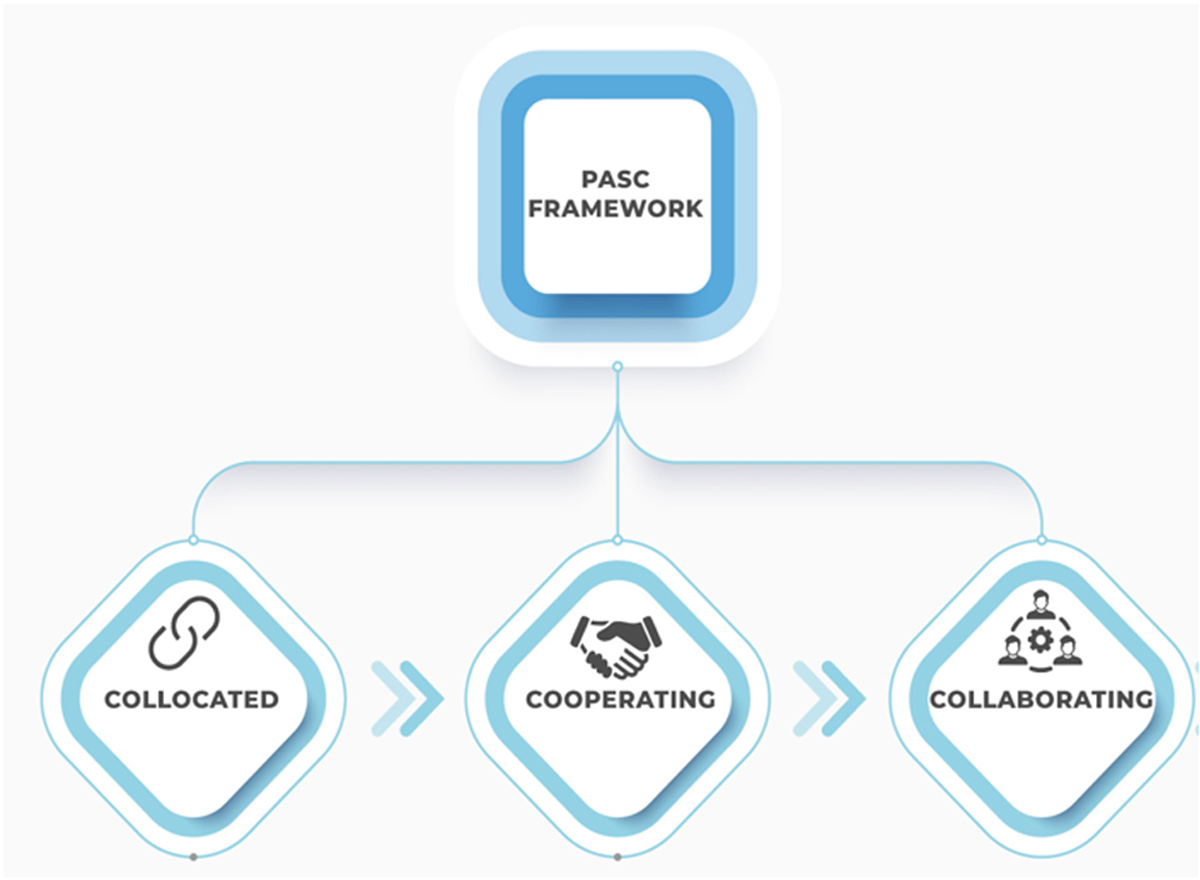
Expectancy-value Theory (EVT) is a motivational theory that posits students’ achievement-related choices are determined by two factors: (1) expectancies for success and (2) subjective task values [67–69]. That is, motivation will be highest when there is both a high expectancy of success and a high value attached to the task. EVT informed earlier work on the Presence and Social Connectedness (PASC) framework (Figure 1) that was developed to gauge presence and engagement of remote students using robots in traditional classrooms [8]. The PASC framework provides a useful heuristic for evaluating the degree to which students engage with the learning experience as mediated by the robot. Within the PASC framework, there are three forms of interaction that describe increasing levels of engagement: collocated, cooperating, and collaborating.
Fig. 1.
PASC framework.
Based on EVT and traditional telepresence robot design, we determined a priori codes (i.e., codes that are developed before examining the current data) that might represent extension beyond the highest PASC level of “collaboration” to self-directed play. Play occurs when a child has high social expectancy for success, high value attached to the task, and high confidence in robot capabilities to achieve expected tasks. Three a priori codes were selected to represent this novel level of engagement: ability to speak/hear (verbal play), ability to move (physical play), and ability to adapt to different learning situations (other play). We hypothesize that once children have achieved high levels of collaboration, children are afforded the opportunity to self-initiate play tasks that have high intrinsic value for the child.
4. METHODOLOGY
The key research question we explored in our study was: How do children use robots for self-directed play activities? We used qualitative methods to explore the perspective and meaning of salient experiences, identify social structures, and identify processes in order to understand the meaning behind participant behavior [70, 71].
This study employed a case study research methodology that consisted of individual interviews, group interviews, and field notes. To provide an in-depth, multidimensional study of real-world experiences of robot-mediated play, data were collected from multiple sources and sites to bring out details from the viewpoints of all participants [72]. Novelty effects were considered minimal as all participants used (or had used) a robot for long-term, daily school attendance at the time of interview. This article explores categories of play and emerging themes through within-case and cross-case analyses of participants in robot-mediated learning experiences. Each case consists of a remote child and their parents, teachers, and/or classmates.
As a national study with remote students from multiple states, our research was approved by a university Institutional Review Board (IRB), as well as the respective IRBs and external research approval boards of our public school district partners in other states.
4.1. Participants
For this article, sources of data consisted of individual and group interviews with remote children and their parents, classmates, and teachers. We conducted semi-structured interviews in 53 cases where remote children used robots to attend school and extracurricular activities (n = 53) (Table 1). The interviews also included some teachers and classmates (located at the school, co-present with the robot), as well as some parents (located at home with the child), yielding an additional 36 participants. In total, the participant sample size for this study was N = 89.
Table 1.
Grade Levels of Remote Children
| Grade Levels | Remote Children (n = 53) |
|---|---|
| High School (grades 9–12) | 14 |
| Middle School (grades 6–8) | 23 |
| Elementary School (grades 1–5) | 16 |
The robot models used in this study were the Double2 and VGo (Figure 2). In our study, each remote child represents one case, and all remote children were restricted to their homes as a secondary consequence of illness/medical condition. Researchers did not collect demographic data on any of the children’s classmates or teachers who participated in the focus group interviews, per school district guidelines.
Fig. 2.

Double2 and VGo Robots.
4.1.1. Participant Recruitment and Informed Consent.
All participants were provided with study information sheets approved by our IRB and local school district. Study information sheets were read aloud by the interviewer before each individual or group interview to provide ample time for questions about the study. Child participants received parental permission and gave verbal assent to being interviewed before interviews were conducted. Parents and teachers provided written/signed consent.
4.1.2. Robots Used by Participants.
The robot models used in this study were the commercially available VGo and Double2 telerobots. Both models of robot offer remote-controlled mobility, real-time audio/video, obstacle avoidance, and occupancy awareness. The Double robot also offers remote-controlled adjustable height for sitting and standing activities.
4.2. Data Sources
To increase trustworthiness in the data and confirm validity of the processes, we followed Yin’s [72] recommendation to use multiple sources of data. Triangulation, protocols that are used to ensure accuracy and alternative explanations of the data [73], was accomplished by collecting data from different sources (i.e., remote children and their parents, teachers, and classmates) and using different methods (i.e., semi-structured interviews, observations, focus groups). It was expected that the concepts and themes related to self-directed play would emerge from the multiple sources of data through inductive content analysis, open coding, and the constant comparative method recommended by Glaser and Strauss [74].
Two interview methods were used in this study: focus group interviews and semi-structured interviews. Our focus group interview participants consisted of classmates who interacted with a remote child using a robot for daily school attendance. The remote child also participated (via robot) in the focus group interviews. Focus group interviews were also observed, and field notes recorded, to gain insights into participant attitudes and perspectives. Semi-structured interviews were conducted with the remote child and their parents/guardians and teachers when available. All interviews were audio recorded, transcribed, and coded to identify patterns, similarities, and dissimilarities across all cases where each case represented one remote child.
Focus group interviews lasted 10 minutes (per district guidelines) and semi-structured interviews lasted 10–50 minutes. Questions covered a range of topics, including social experiences and academic learning. Direct questions about play activities were not included in our interview topics. However, topics of play and fun activities arose organically during both individual and focus group interviews.
4.3. Analysis
The process of analyzing the data involved coding and categorizing the data. Following Patton’s model, our analysis involved making sense of the data by reducing the volume of raw information, followed by identifying significant patterns, and finally drawing meaning from the data and subsequently building a logical chain of evidence [75].
4.4. Coding
We employed a hybrid coding approach that combines deductive and inductive methods. We began our analysis with a set of a priori codes (deductive) and then added new codes (inductive) as we worked through the data. A priori codes were informed by the PASC framework that evaluates levels of presence and engagement in robot-mediated learning.
However, a need for hybrid coding to include inductive coding was influenced by EVT [76] as children who self-initiated play activities (1) displayed a high expectancy for success and (2) determined a high value on reported play activities. As such, what we know about robot-mediated presence and engagement (PASC) provided foundational a priori codes, but inductive coding was needed to identify high-value play scenarios that were facilitated by the robots. All play activities that were self-initiated and directed by participants were understood to be high-value play tasks that displayed important aspects of play: motivation, engagement, and joy [10].
To explore high-value play tasks and scenarios that were self-initiated by participants, we employed values coding as part of the inductive coding process. Values coding involves coding that relates to the participant’s worldview [77]. In our dataset, we focused on interviews that reflected the values, attitudes, and salient experiences of the participants as they related to concepts of play.
To improve the systematicity, communicability, and transparency of the coding process, we employed intercoder reliability through a double-coding practice [77, 78]. The coding team was composed of two faculty members, one graduate student, four undergraduate students, and a research staff member. Initial coding was performed on transcripts following Glaser and Strauss’s [74] description of open coding where tentative labels are applied to sections of data and these labels are later classified under common concepts or categories as the data undergo multiple rounds of coding. A list of the code words for each transcript was compiled and compared across the individual cases. This allowed for checks to ensure that a code was used consistently throughout the transcripts. During these steps, notes were taken and recorded of emerging codes, the ideas they represented, and relationships between codes. After the initial round of open coding, the research team discussed each coded section in terms of why it had been interpreted as meaningful and what it revealed about participant robot-mediated “play.” After discussion, the research team agreed upon a set of codes, each with a brief definition. These codes formed the initial analytic framework. The lead researcher then independently coded each of the interview transcripts using the initial framework. Notes were taken on codes or impressions that did not fit the existing analytic framework. Codes were then refined, and new codes were introduced where necessary. The themes and concepts that emerged from the analysis were repeatedly compared with the transcripts to ensure their validity. The constant revision of the material allowed for some codes to be subsumed under broader and more abstract categories. The final code categories can be seen in Table 2.
Table 2.
Codebook Sample
| Codes | Definitions | Examples |
|---|---|---|
| Physical Play | Physical use of the robot body and/or mobility for engagement in play with peers or the remote environment | Personalization, running, spinning, yelling, posing, racing, bumping into people/things for fun, receiving hugs |
| Verbal Play | Use of the audio and speaker features on the robot for play communication | Chatting at lunch, telling jokes, laughter |
| Visual Play | Use of the face screen for play visuals on face screen | Show and Tell, putting up funny screen saver pics to make peers laugh |
| Extracurricular Play | Organized activities outside of formal academic learning, child selected for enjoyment | School-sponsored clubs and activities, family-sponsored clubs and activities |
| Wished-for Play | Play/fun things the robot can’t do right now but they wish it could | Arms, hands, feet, legs, flying, outdoor activities |
5. RESULTS
In analyzing the interview data, two key themes emerged: robot-mediated play served as a foundational support of general friendships, and robot-mediated play served as a form of self-expression and identity (Figure 3). Children identified a range of self-directed play in three different play scenarios to support general friendship: physical, verbal, and visual. Two different play scenarios, extracurricular play and wished-for play, supported the remote child’s need for individual creativity and self-expression through self-directed activities. Wished-for play scenarios also represented a child’s self-expression and creativity in the desire to move beyond existing robot capabilities and imagine novel robot capabilities that would allow them to create new play scenarios through enhanced technological features (Figure 4).
Fig. 3.

Themes in self-directed play.
Fig. 4.

Physical, verbal, and visual play scenarios.
Below, we present our findings per number of participants who reported using their robots for the specified play scenario and also by total count of play activities reported within the play scenario as some participants used their robots within multiple play scenarios and also different play activities within the scenarios.
5.1. Physical Play Scenarios
Thirty-five participants reported at last one instance of using their robots for physical play and 18 reported more than one instance of physical play for a total of 62 reported play activities within seven different play scenarios (Table 3). Physical play was operationalized as “physical use of the robot body and/or mobility for engagement in play with peers.” Two different forms of interaction emerged in physical play scenarios: (1) independent physical play and (2) collaborative physical play. Independent play was limited to physical control of the robot to do “donuts” and “bump” into objects to test limits of the robot body and where peer feedback or interaction was not reported. Independent play also occurred in personalization of the robot with clothing, stickers, and costumes to represent aspects of the remote child’s identity. Collaborative physical play consisted of scenarios where remote children reported playing with their peers through robot-mediated physical interactions. These interactions occurred both in the school environment and at home. Examples of play interactions at school included using the robot body to chase friends, race friends, bump into people/things for fun, receive hugs, walk with friends, and pose for selfies with friends.
Table 3.
Physical Play Scenarios
| Physical Play Scenario Descriptions (n = 62) | Percent of (n) |
|---|---|
|
| |
| 1. Personalization: clothing, stickers, costumes | 52% |
| 2. Chasing/running/bumping/motion games | 18% |
| 3. Access lunchroom, other school areas | 15% |
| 4. Peer touch: physical closeness, hug | 6% |
| 5. Remote child playing along with local peers | 3% |
| 6. Attending recess | 3% |
| 7. Selfies, social media pose | 3% |
Use of the robot in the school environment also inspired physical play activities within the home of the remote child. Examples of these activities included participating in a hula hoop competition and playing games alongside peers in the classroom. Quotes from children on physical play include:
“Oh, I did donuts with the robot!” (remote child)
“I was in a. . . robot movie [as an actor].. . . I was supposed to be a robo-cop.” (remote child)
“They would be almost kissing you [robot] every morning. ‘Hi J!’ Right in your face!” [laughing] (remote child)
“He won a hula hoop contest in PE today.” (teacher)
“I raised the head of the robot. When they say stand for the pledge and . . . and my teacher like cracks up every time . . . . It’s really funny!” (remote child)
“In PE,. . . I mean, that’s hilarious,. . . kind of like Pac-Man. . . the gym has the basket-ball,. . . lines?. . . the kids have to stay on the lines. And so, somebody is it.” (teacher)
5.2. Verbal Play Scenarios
Twenty-six participants reported at last one instance of using their robots for verbal play and four reported more than one instance of verbal play for a total of 31 reported activities within three different play scenarios (Table 4). Verbal play was operationalized as “use of the audio (i.e., microphone and speaker) features on the robot for play communication with peers.” Eighty-four percent of verbal play activities centered on socializing and interacting with friends via “talking” during lunch, breaks, recess, and other non-academic activities.
Table 4.
Verbal Play Scenarios
| Verbal Play Scenario Descriptions (n = 31) | Percent of (n) |
|---|---|
|
| |
| 1. Talking | 84% |
| 2. Laughter, jokes | 13% |
| 3. Yelling at recess | 3% |
Thirteen percent of reported verbal play activities specifically mentioned laughter: laughing at something someone said, telling a joking and causing others to laugh, or laughing at something funny they participated in via the robot.
Three percent of verbal play scenarios (i.e., one participant) had to do with “yelling.” Yelling was considered a play activity in the context of participating in recess by going outside and yelling at friends with full robot volume capacity in order to receive “yell-backs” from friends. All reported verbal play scenarios were considered collaborative play. Quotes from children on verbal play include:
“He’d tell jokes sometimes on that thing! [robot]” (classmate)
“They take him outside for recess. And you can hear him yelling at. . . his friends.” (teacher)
“I think it was one of the times he laughed for the first time since we had started this. He was talking to people through the robot and he just started laughing.” (parent)
5.3. Visual Play Scenarios
Seven participants reported at last one instance of using their robots for visual play for a total of seven reported activities within two different play scenarios (Table 5). Visual play was operationalized as “use of the face screen on the robot for sharing items via the robot’s face screen for play and/or humor.” Sharing funny avatars and images to entertain peers via the face screen made up 57% of reported visual play activities. The other 43% included sharing play creations such as Legos, drawings, and other artifacts via the face screen. Quotes from children on visual play include:
“I changed it [face screen avatar] a lot. . . . People would say, ‘put up. . . SpongeBob’ or ‘. . . a banana’. . . and I would just put it up.” [laughing] (remote child)
“He came up [with the robot] and he showed me his Legos that he’s been working on.” (teacher)
“. . . was driving [the robot] around. Was outside, and kids were playing basketball, and he stopped to look. Never had seen kids play basketball [before].” (teacher)
Table 5.
Visual Play Scenarios
| Visual Play Scenario Descriptions (n = 7) | Percent of (n) |
|---|---|
|
| |
| 1. Funny avatar/face screen | 57% |
| 2. Sharing fun creations, play artifacts | 43% |
5.4. Extracurricular Play Scenarios
Fifteen participants reported at last one instance of using their robots for extracurricular play and three reported more than one instance of extracurricular play for a total of 19 reported activities within eight different play scenarios (Table 6). Extracurricular play was operationalized as “organized activities outside of formal academic learning, child-selected for enjoyment (not course credit).” Fifty-three percent of extracurricular play activities occurred on-campus. Some on-campus activities included parties, clubs, practice, and volunteer reading. Forty-seven percent of extracurricular activities occurred off-campus. Off-campus activities were supported by adults who transported the robot but were directed by participants. These activities took place within organized groups (i.e., Boy Scouts, choirs, dance practice) (Figure 5) and informal settings (i.e., filming a movie with friends, aquarium visit, print shop visit). Quotes from children on extracurricular play include:
“After school activities, so they can at least go to robotics club even though they’re not there.” (teacher)
“He comes to the Boy Scout meetings. . . ” (teacher)
“He sings with choir. If we have a choir performance, he’s there with his robot.” (teacher)
Table 6.
Extracurricular Play Scenarios
| Extracurricular Play Scenario Descriptions (n = 19) | Percent of (n) | |
|---|---|---|
|
| ||
| 1. Clubs: robotics, broadcast, cheer, art | 26% | |
| 2. Parties: holiday, dance | 16% | |
| 3. International family visit | 5% | On-campus 58% |
| 4. Ceremonies: Awards | 5% | |
| 5. Read books to lower grades | 5% | |
|
| ||
| 6. OC Clubs: Boy Scouts, choir, dance | 26% | |
| 7. Field visits: aquarium, print shop | 11% | Off-campus 42% |
| 8. Film acting | 5% | |
Fig. 5.

Extracurricular play scenarios.
5.5. Wished-for Play Scenarios
Twenty-three participants reported at least one example of wished-for play and seven of these participants reported more than one example of wished-for play for a total of 40 reported activities within nine different play scenarios (Table 7). Wished-for play was operationalized as “play/fun things the robot can’t do right now but they wish it could.” Thirty-five percent of wished-for play activities centered on having arms and hands to “do stuff” (Figure 6). Examples included “knock on doors” and “touch things.”
Table 7.
Wished-for Play Scenarios
| Wished-for Play Descriptions (n = 40) | Percent of (n) |
|---|---|
|
| |
| 1. Arms/hands | 35% |
| 2. Legs/feet/outdoor capabilities | 18% |
| 3. Fly | 13% |
| 4. Provide service for remote child/peers | 13% |
| 5. Rocket boots | 10% |
| 6. Head/body turn independently (for surprises, conversations) | 8% |
| 7. Jump/hop capabilities | 3% |
| 8. Invisible then reappear in new location (to play tricks, surprise others) | 3% |
Fig. 6.

Wished-for play scenarios.
Eleven percent of play activities centered on scenarios that would allow children to move comparably to their peers with their “feet” (i.e., jump/hop), bodies (i.e., head and body move independently and quickly), and hands (i.e., play video games alongside peers). Several participants expressed a desire for the robot to have capabilities that would provide them and their peers with assistance. These activities were grouped into the “service” play scenario as they replicate real-world capabilities in imagined robot-mediated play scenarios not unlike what young children do with play kitchens, cars, and so forth. The desire for exploration of robot capabilities to provide services is considered play as it displays intrinsic motivation to achieve these tasks, entails active engagement with robot and/or peers, and expresses a desire for discovery to see if these tasks could be accomplished via their robot. Quotes from children on wished-for play include:
“It should have arms . . . and then I could go to a dance through the robot.” (remote child)
“. . . there would be like a magic thing through the computer and you just stick your hands in it and it goes through the arms in the robot . . . ” (remote child)
“I wish it can fly.” (remote child)
“. . . like a robotic arm or tray, so she could maybe physically hold something.” (classmate)
“I wish he could have hands and arms and, this is gonna be kind of funny but, like rocket boots in the bottom of his shoes.” (classmate)
“I wish he could pick up a hula hoop.” (classmate)
“. . . maybe also arms. . . for like science experiments.” (remote child)
“Having a way to knock on doors would be nice.” (remote child)
“I wish it could do a bunny hop.” (remote child)
“It’d be cool if one day it had arms, you could like control the arm and write with it.” (remote child)
“I actually wish it had some sort of legs, so I could go on the walk with everyone else.” (remote child)
6. DISCUSSION
To address our research question, “How do children use robots for self-directed play activities?” two themes emerged from the data: (1) robot-mediated play as a foundational support of general friendships and (2) robot-mediated play as a form of self-expression and identity. Within these themes there were five unique play scenarios that captured the way children used their robots for self-directed collaborative and individual forms of play. As these robots were intended for academic learning and not play, the play scenarios that emerged in our study occurred organically and were self-directed by child robot users who placed a high value on robot-mediated friendships and self-development. Additionally, they felt competent in their mastery of the robot and environment to accomplish the resulting play activities.
Initially, based on the literature and earlier work, we structured our coding scheme to capture robot-mediated play activities as comparable to in-person play. However, our study and analysis revealed the complexity of play as varied developmental and behavioral concepts intermingled throughout the identified play scenarios. As a result, instead of remaining fixed on forms of traditional in-person play, our analysis revealed similarities in the benefits of play. In this study, the most salient benefits of robot-mediated play that are similar to in-person play include (1) providing exercise for the feelings, (2) training for the mind, and (3) practice for the body [12].
6.1. Exercise for the Feelings
Across all play scenarios, there were many examples of play providing a platform to exercise feelings in reported laughter, “fun” conversations with friends, and playful physical interactions. Children appeared to exercise their feelings in all three areas of physical, verbal, and visual play. However, exercise for the feelings appeared to have the highest occurrence in the verbal play scenario, where 83% of reported play activities included talking at lunch, chatting, or telling stories. One participant even noted that talking and laughing with their friends helped them during medical recovery times. Fourteen percent of verbal play activities used words such as “laughter,” “jokes,” and “funny.” Although smaller in number, even the ability to yell when other children were yelling had high value for feeling included and part of the recess group.
Design Recommendations.
As part of exercise for the feelings, the face screens on the robots allowed for visual play. A small number of participants reported using the face screen to playfully interact with peers (n = 7). Some students used the face screen to display funny images to make their friends laugh, but some students used the face screens to share their Lego creations, painted nails, and other play artifacts from their homes. These visual play activities revealed high levels of belonging and competence to entertain their friends. Ideally, in order to help children explore their feelings in verbal play scenarios, future robots should include audio capabilities that allow for one-on-one and group conversations that may take place both indoors and outdoors. Audio capabilities should also allow for yelling in outdoor settings for children to cheer for their friends or participate verbally in outdoor activities. Existing face screens seemed to provide sufficient capabilities for visual play.
6.2. Exercise for the Body
Exercise for the body was seen in the physical play scenario, as a few children displayed exercise for their bodies in the home environment by doing exercises alongside their school peers. However, 52% of reported physical play scenarios involved children personalizing their robots with stickers, costumes, clothing, playful name tags, and so forth. While these activities did not provide physical exercise for the human body, they revealed physical representations of identity and the self. More physical activity was seen in 18% of the activities that involved the physical robot body chasing, bumping, or playing motion games with peers. Even though the remote child was not physically present in the school environment, they initiated playful bodily interactions with local peers.
Design Recommendations.
Future tele-operated robotic systems that support physical play scenarios should have body options that allow for creative personalization in order for children to express their physical identities via dress and representative artifacts (e.g., stickers, plush animals, etc.). Additionally, future robotic systems should also be designed with materials that allow for playful bumps and physical interactions as these activities had a high level of occurrence even with robots that were not designed for play.
6.3. Training for the Mind
It can be argued that all play activities provide training for the mind as play is a major contributor to social-emotional development [12]. In our study, we viewed self-directed extracurricular play scenarios as occupying a central role in training for the mind. Participants engaged in extracurricular activities that were outside of general friendships in the school and were self-selected by the remote child based on individual interests. Attending extracurricular activities requires assistance from peers in the on-campus environment or parents/adults in off-campus environments. The extracurricular play activities included parties, dances, film acting, field visits, and clubs, among other activities.
Design Recommendations.
In order to reduce cognitive load on students, robots that are used for extracurricular activities should function as well off-campus as they do on-campus. Navigating a new built environment can be challenging for remote children as they need to learn a new floor print and also learn where connectivity may lag, acoustics for their speakers, and physical obstacles such as door jambs and flooring materials (e.g., plush carpet, rugs). In our study, all off-campus activities were facilitated by the robot’s ability to log in to public Wi-Fi.
Future robots should have capabilities for ease of transition between secure school district Wi-Fi systems and public Wi-Fi systems with parental controls. Additionally, public spaces should have accessibility in the built environment that allows children to use their robots. Examples of this include American Disabilities Act (ADA)-compliant ramps, Wi-Fi connectivity in elevators, and ADA-accessible doors.
As robot usage increases outside of schools, public environments will have to be designed for robot access and compliance with local laws governing robots in public spaces. For example, recent work has explored what kind of rules are actually being created for sidewalk robot use and the impact these rules will have on public urban environments where these technologies are operating [79]. When children are learning how to navigate new environments with their robots, how these environments are designed and local laws may have a direct impact on the remote children’s rights to use robots outside of schools.
Creative Design Recommendations.
Wished-for play scenarios captured participants’ imaginations with dream robot features including “ability to fly,” being “invisible,” and being able to “eat” and convey taste to the child. However, they also captured realistic play scenarios that are not possible with existing technologies but are still wished for. Children expressed interest in having arms and hands to hold things, knock on doors, and touch the environment. The ability to play soccer, go for walks outdoors, and participate in recess also revealed the limitations of existing systems. It is perhaps not realistic to expect a robot to play soccer for you, but wanting to participate in this normative activity relays the desire for play to also exercise the body.
Wishing their robot could fly is an example of a wished-for feature that is not available in currently available tele-robots but is available in other technologies. As flying drones have been used to explore the physical world by adults who are restricted to their homes [80, 81], designers may consider incorporating flying drone systems for exploration and additional play scenarios.
Another aspect of wished-for play included movements that were comparable to their peers for the capability to react to surprises in real time, to turn their heads, and to jump or hop. It is possible that the slowness of robot movement and the inability for the remote child to turn the robot’s head triggers these desires, as these limitations disrupt the play experience when others react quickly and the remote child is not able to do so. Future robots should have mobility features beyond the mobile base to include quick, independent movement of the head and torso for real-time reactions to sounds or surprises and possibly the ability to “hop” when needed. All future systems should also have adjustable height capabilities for standing and sitting play activities in order for the remote child to occupy physical space comparable to their peers.
6.4. Future Work
Future work will explore extension of the PASC framework into highly motivated play scenarios that meet Brown’s [12] elements of play. For example, exercise for the feelings may take place in other (i.e., undefined) forms of play, training for the mind may occur in verbal play, and practice for the body may occur in forms of physical play (Figure 7). Using robots for self-directed play represents a higher level of presence and engagement than “collaborating” as the remote child is initiating activities and experiences beyond formal learning tasks/activities that are structured by adult educators. Conceptually, when it comes to self-directed play activities, the remote child has moved beyond collocation, cooperation, and collaboration. In robot-mediated self-directed play, the remote child does, in fact, become a leader.
Fig. 7.

Extension of PASC framework to elements of play.
7. CONCLUSION
In this article, we investigated how children used school-distributed robots in self-directed play activities. We identified two themes that were interwoven throughout all self-reported play scenarios of physical, verbal, visual, extracurricular, and wished-for play. Our findings suggest that children who feel a high chance of success at operating their robots in the remote school environment and place a high value on self-directed play activities are able to use their robots to support general friendships and also engage in play activities that contribute to self-expression and identity. Findings from our study may inform future design of robots for children to facilitate play activities for optimal child development.
Additionally, addressing the social contexts of robot-mediated play, in both on- and off- campus environments, will guide future research in learning sciences and the HRI community to find innovative approaches to the use of robots for holistic robot-mediated developmental and learning experiences. Our work represents a starting point for exploring ways that remote children can use their robots to represent them in real and imagined play scenarios.
ACKNOWLEDGMENTS
The content is solely the responsibility of the authors and does not necessarily represent the official views of the NIH, and any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation.
The project described was supported by the National Center for Research Resources and the National Center for Advancing Translational Sciences, National Institutes of Health, through Grant TL1 TR000148. Additionally, this material is based upon work supported by the National Science Foundation under Grant No. 2136847.
Footnotes
ACM Reference format:
Verónica Ahumada-Newhart, Margaret Schneider, and Laurel D. Riek. 2023. The Power of Robot-mediated Play: Forming Friendships and Expressing Identity. ACM Trans. Hum.-Robot Interact. 12, 4, Article 44 (September 2023), 21 pages. https://doi.org/10.1145/3611656
Contributor Information
VERÓNICA AHUMADA-NEWHART, University of California, Davis, USA.
MARGARET SCHNEIDER, University of California, Irvine, USA.
LAUREL D. RIEK, University of California, San Diego, USA
REFERENCES
- [1].Piaget Jean. 1962. Play, Dreams, and Imitation in Childhood. W. W. Norton & Co., New York. [Google Scholar]
- [2].Guha Martin. 2011. The Wiley-Blackwell Handbook of Childhood Cognitive Development. Reference Reviews.
- [3].Piaget Jean. 1952. The Origins of Intelligence in Children. (Margaret Cook, Trans.). International Universities Press, Inc. New York. [Google Scholar]
- [4].Ginsburg Kenneth R., Committee on Psychosocial Aspects of Child, and Family Health. 2007. The importance of play in promoting healthy child development and maintaining strong parent-child bonds. Pediatrics 119, 1 (2007) 182–191. [DOI] [PubMed] [Google Scholar]
- [5].Graber Kelsey M., Byrne Elizabeth M., Goodacre Emily J., Kirby Natalie, Kulkarni Krishna, O’Farrelly Christine, and Ramchandani Paul G.. 2021. A rapid review of the impact of quarantine and restricted environments on children’s play and the role of play in children’s health. Child: Care, Health and Development 47, 2 (2021), 143–153. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [6].Tsoi Nathan, Connolly Joe, Emmanuel Adéníran Amanda Hansen, Pineda Kaitlynn Taylor, Adamson Timothy, Thompson Sydney, Ramnauth Rebecca, Vázquez Marynel, and Scassellati Brian. 2021. Challenges deploying robots during a pandemic: An effort to fight social isolation among children. In Proceedings of the 2021 ACM/IEEE International Conference on Human-robot Interaction. 234–242. [Google Scholar]
- [7].Ahumada-Newhart Veronica and Olson Judith S.. 2019. Going to school on a robot: Robot and user interface design features that matter. ACM Transactions on Computer-human Interaction 26, 4 (2019), Article 25. 10.1145/3325210 [DOI] [PMC free article] [PubMed] [Google Scholar]
- [8].Ahumada-Newhart Veronica and Eccles Jacquelynne S.. 2020. A theoretical and qualitative approach to evaluating children’s robot-mediated levels of presence. APA, Technology, Mind, and Behavior 1, 1 (2020), 10–37. 10.1037/tmb0000007 [DOI] [PMC free article] [PubMed] [Google Scholar]
- [9].Newhart Veronica A. and Olson Judith S.. 2017. My student is a robot: How schools manage telepresence experiences for students. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems (CHI’17), Association for Computing Machinery (ACM), 342–347. 10.1145/3025453.3025809 [DOI] [Google Scholar]
- [10].Yogman Michael, Garner Andrew, Hutchinson Jeffrey, Hirsh-Pasek Kathy, Golinkoff Roberta Michnick, Baum Rebecca, Gambon Thresia, Lavin Arthur, Mattson Gerri, and Wissow Lawrence. 2018. The power of play: A pediatric role in enhancing development in young children. Pediatrics 142 (2018), 3. [DOI] [PubMed] [Google Scholar]
- [11].Newhart Veronica A., Warschauer Mark, and Sender Leonard. 2016. Virtual inclusion via telepresence robots in the classroom: An exploratory case study. International Journal of Technologies in Learning 23, 4 (2016), 9–25. 10.18848/2327-0144/CGP/v23i04/9-25 [DOI] [Google Scholar]
- [12].Brown Stuart. 2009. Discovering the importance of play through personal histories and brain images: An interview with Stuart Brown. American Journal of Play 1, 4 (2009), 399–412. [Google Scholar]
- [13].Nations United. 1989. Convention on the Rights of the Child: Adopted and Opened for Signature, Ratification and Accession by General Assembly Resolution 44/25 of 20 November 1989. United Nations, Geneva, Switzerland. [Google Scholar]
- [14].Milteer Regina M., Ginsburg Kenneth R., Council on Communications, Media Committee on Psychosocial Aspects of Child, Family Health, Mulligan Deborah Ann, Ameenuddin Nusheen, Brown Ari, Christakis Dimitri A., Cross Corinn, Falik Holly Lee, and Hill David L.. 2012. The importance of play in promoting healthy child development and maintaining strong parent-child bond: Focus on children in poverty. Pediatrics 129, 1 (2012), e204–e213. [DOI] [PubMed] [Google Scholar]
- [15].World Health Organization. 2002. Towards a Common Language for Functioning, Disability and Health: ICF. World Health Organization, Geneva, Switzerland. Retrieved June 20, 2012, from http://www.who.int/classifications/icf/beginners . . . . [Google Scholar]
- [16].World Health Organization (WHO). 2019. International Classification of Functioning, Disability and Health (ICF). World Health Organization, Geneva, Switzerland. https://cdn.who.int/media/docs/default-source/classification/icf/icfbeginnersguide.pdf [Google Scholar]
- [17].Eberle Scott G.. 2014. The elements of play: Toward a philosophy and a definition of play. American Journal of Play 6, 2 (2014), 214–233. [Google Scholar]
- [18].Shonkoff Jack P.. 2003. From neurons to neighborhoods: Old and new challenges for developmental and behavioral pediatrics. Journal of Developmental & Behavioral Pediatrics 24, 1 (2003), 70–76. [DOI] [PubMed] [Google Scholar]
- [19].Tamis-LeMonda Catherine S., Shannon Jacqueline D., Cabrera Natasha J., and Lamb Michael E.. 2004. Fathers and mothers at play with their 2- and 3-year-olds: Contributions to language and cognitive development. Child Development 75, 6 (2004), 1806–1820. [DOI] [PubMed] [Google Scholar]
- [20].Mahoney Joseph L., Harris Angel L., and Eccles Jacquelynne S.. 2006. Organized activity participation, positive youth development, and the over-scheduling hypothesis. Social Policy Report Society for Research in Child Development 20, 4 (2006), 3–31. [Google Scholar]
- [21].Eccles Jacquelynne S. and Templeton Janice. 2002. Chapter 4: Extracurricular and other after-school activities for youth. Review of Research in Education 26, 1 (2002), 113–180. [Google Scholar]
- [22].Erickson Ralph J.. 1985. Play contributes to the full emotional development of the child. Education 105 (1985), 3. [Google Scholar]
- [23].Blasi Maryjane, Hurwitz Sally C., and Hurwitz Sally C.. 2002. For parents particularly: To be successful—let them play! Childhood Education 79, 2 (2002), 101–102. 10.1080/00094056.2003.10522779 [DOI] [Google Scholar]
- [24].Pellegrini Anthony D. and Smith Peter K.. 1998. The development of play during childhood: Forms and possible functions. Child Psychology and Psychiatry Review 3, 2 (1998), 51–57. [Google Scholar]
- [25].Robins Ben, Dautenhahn Kerstin, Ferrari Ester, Kronreif Gernot, Prazak-Aram Barbara, Marti Patrizia, Iacono Iolanda, Gelderblom Gert Jan, Bernd Tanja, and Caprino Francesca. 2012. Scenarios of robot-assisted play for children with cognitive and physical disabilities. Interaction Studies 13, 2 (2012), 189–234. [Google Scholar]
- [26].Klein Tanja, Gelderblom Gert Jan, de Witte Luc, and Vanstipelen Silvie. 2011. Evaluation of short term effects of the IROMEC robotic toy for children with developmental disabilities. In IEEE International Conference on Rehabilitation Robotics. IEEE, 1–5. [DOI] [PubMed] [Google Scholar]
- [27].Kronreif Gernot, Prazak Barbara, Mina Stefan, Kornfeld Martin, Meindl Michael, and Furst M. 2005. Playrob-robot-assisted playing for children with severe physical disabilities. In 9th International Conference on Rehabilitation Robotics, 2005 (ICORR’05). IEEE, 193–196. [Google Scholar]
- [28].Riek Laurel D. and Robinson Peter. 2011. Using robots to help people habituate to visible disabilities. In 2011 IEEE International Conference on Rehabilitation Robotics. IEEE, 1–8. [DOI] [PubMed] [Google Scholar]
- [29].Luxton David D. and Riek Laurel D.. 2019. Artificial intelligence and robotics in rehabilitation. In Handbook of Rehabilitation Psychology, 3rd ed., American Psychological Association, 507–520. [Google Scholar]
- [30].Moharana Sanika, Panduro Alejandro E., Lee Hee Rin, and Riek Laurel D.. 2019. Robots for joy, robots for sorrow: Community based robot design for dementia caregivers. In 2019 14th ACM/IEEE International Conference on Human-robot Interaction (HRI’19). IEEE, 458–467. [Google Scholar]
- [31].Castro-González Álvaro, Tan Xiang Zhi, Carter Elizabeth, and Steinfeld Aaron. 2018. Social haptic interaction between robots and children with disabilities. In Companion of the 2018 ACM/IEEE International Conference on Human-robot Interaction. 81–82. [Google Scholar]
- [32].Jimenez Felix, Yoshikawa Tomohiro, Furuhashi Takeshi, Kanoh Masayoshi, and Nakamura Tsuyoshi. 2017. Feasibility of improving the learning time in collaborative learning between children with potential symptoms of a developmental disability and robots which prompts learning by teaching. Transactions of the Japanese Society for Artificial Intelligence 32, 5 (2017), 454–461. [Google Scholar]
- [33].Ahumada-Newhart Veronica and Marcin James. 2022. Telehealth frontiers: Social telerobots in developmental and behavioral pediatrics. Journal of Medical Internet Research, Iproc 8, 1 (2022), e41060. 10.2196/41060 [DOI] [Google Scholar]
- [34].Robins Ben and Dautenhahn Kerstin. 2014. Tactile interactions with a humanoid robot: Novel play scenario implementations with children with autism. International Journal of Social Robotics 6, 3 (2014), 397–415. [Google Scholar]
- [35].Boccanfuso Laura, Barney Erin, Foster Claire, Yeojin Amy Ahn Katarzyna Chawarska, Scassellati Brian, and Shic Frederick. 2016. Emotional robot to examine different play patterns and affective responses of children with and without ASD. In 2016 11th ACM/IEEE International Conference on Human-robot Interaction (HRI’16). IEEE, 19–26. [Google Scholar]
- [36].Huskens Bibi, Palmen Annemiek, Van der Werff Marije, Lourens Tino, and Barakova Emilia. 2015. Improving collaborative play between children with autism spectrum disorders and their siblings: The effectiveness of a robot-mediated intervention based on Lego® therapy. Journal of Autism and Developmental Disorders 45, 11 (2015), 3746–3755. [DOI] [PubMed] [Google Scholar]
- [37].Scassellati Brian, Admoni Henny, and Matarić Maja. 2012. Robots for use in autism research. Annual Review of Biomedical Engineering 14 (2012), 275–294. [DOI] [PubMed] [Google Scholar]
- [38].Belpaeme Tony, Baxter Paul, Joachim de Greeff James Kennedy, Read Robin, Looije Rosemarijn, Neerincx Mark, Baroni Ilaria, and Zelati Mattia Coti. 2013. Child-robot interaction: Perspectives and challenges. In International Conference on Social Robotics. Springer, 452–459. [Google Scholar]
- [39].van Straten Caroline L., Peter Jochen, and Kühne Rinaldo. 2020. Child–robot relationship formation: A narrative review of empirical research. International Journal of Social Robotics 12, 2 (2020), 325–344. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [40].Zguda Paulina, Kołota Anna, Venture Gentiane, Sniezynski Bartlomiej, and Indurkhya Bipin. 2021. Exploring the role of trust and expectations in CRI using in-the-wild studies. Electronics 10, 3 (2021), 347. [Google Scholar]
- [41].Funke Rebecca, Fitter Naomi T., de Armendi Joyce T., Bradley Nina S., Sargent Barbara, Mataric Maja J., and Smith Beth A.. 2018. A data collection of infants’ visual, physical, and behavioral reactions to a small humanoid robot. In 2018 IEEE Workshop on Advanced Robotics and Its Social Impacts (ARSO’18). IEEE, 99–104. [Google Scholar]
- [42].Fitter Naomi T., Funke Rebecca, José Carlos Pulido Lauren E. Eisenman, Deng Weiyang, Rosales Marcelo R., Bradley Nina S., Sargent Barbara, Smith Beth A., and Mataric Maja J.. 2019. Socially assistive infant-robot interaction: Using robots to encourage infant leg-motion training. IEEE Robotics & Automation Magazine 26, 2 (2019), 12–23. [Google Scholar]
- [43].Van Mechelen Maarten, Baykal Gökçe Elif, Dindler Christian, Eriksson Eva, and Iversen Ole Sejer. 2020. 18 years of ethics in child-computer interaction research: A systematic literature review. In Proceedings of the Interaction Design and Children Conference. 161–183. [Google Scholar]
- [44].Mott Terran, Lovelace Joslyne, and Steward Bennett. 2021. Design considerations for child-robot interaction in pediatric contexts. In Companion of the 2021 ACM/IEEE International Conference on Human-robot Interaction. 252–256. [Google Scholar]
- [45].Lupetti Maria Luce, Yao Yuan, Mi Haipeng, and Germak Claudio. 2017. Design for children’s playful learning with robots. Future Internet 9, 3 (2017), 52. [Google Scholar]
- [46].Zaga Cristina, Moreno Alejandro, and Evers Vanessa. 2017. Gotta hatch ‘em all! robot-supported cooperation in interactive playgrounds. In Companion of the 2017 ACM Conference on Computer Supported Cooperative Work and Social Computing. 347–350. [Google Scholar]
- [47].Tsui Katherine M., Desai Munjal, Yanco Holly A., and Uhlik Chris. 2011. Exploring use cases for telepresence robots. In 2011 6th ACM/IEEE International Conference on Human-robot Interaction (HRI’11). IEEE, 11–18. [Google Scholar]
- [48].Johnson Steven, Rae Irene, Mutlu Bilge, and Takayama Leila. 2015. Can you see me now? How field of view affects collaboration in robotic telepresence. In Proceedings of the 33rd Annual Acm Conference on Human Factors in Computing Systems. 2397–2406. [Google Scholar]
- [49].Kristoffersson Annica, Coradeschi Silvia, and Loutfi Amy. 2013. A review of mobile robotic telepresence. Advances in Human-computer Interaction (2013), 1–17. [Google Scholar]
- [50].Lee Min Kyung and Takayama Leila. 2011. “Now, I have a body” uses and social norms for mobile remote presence in the workplace. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems. 33–42. [Google Scholar]
- [51].Tsui Kate, Norton Adam, Brooks David, Yanco H, and Kontak Daniel. 2011. Designing telepresence robot systems for use by people with special needs. In International Symposium on Quality of Life Technologies: Intelligent Systems for Better Living. [Google Scholar]
- [52].2003. In touch health and rehabilitation institute at Santa Barbara collaborate to evaluate world’s first mobile remote presence robot for healthcare. In Touch Health, Santa Barbara. Retrieved January 10, 2010 from http://www.intouchhealth.com/pr1-15-03.html [Google Scholar]
- [53].Tsui Katherine M. and Yanco Holly A.. 2007. Assistive, rehabilitation, and surgical robots from the perspective of medical and healthcare professionals. In AAAI 2007 Workshop on Human Implications of Human-robot Interaction, Technical Report WS-07–07 Papers from the AAAI 2007 Workshop on Human Implications of HRI. Springer, Gold Coast, Australia, [Google Scholar]
- [54].Matsumoto Sachiko, Moharana Sanika, Devanagondi Nimisha, Oyama Leslie C., and Riek Laurel D.. 2022. Iris: A low-cost telemedicine robot to support healthcare safety and equity during a pandemic. In International Conference on Pervasive Computing Technologies for Healthcare. Springer, 113–133. [Google Scholar]
- [55].Matsumoto Sachiko, Ghosh Pratyusha, Jamshadm R, and Riek Laurel D.. 2023. Robot, uninterrupted: Telemedical robots to mitigate care disruption. In Proceedings of the 2023 ACM/IEEE International Conference on Human-Robot Interaction, 495–505. [Google Scholar]
- [56].Neustaedter Carman, Venolia Gina, Procyk Jason, and Hawkins Daniel. 2016. To beam or not to beam: A study of remote telepresence attendance at an academic conference. In Proceedings of the 19th ACM Conference on Computer-supported Cooperative Work & Social Computing. 418–431. [Google Scholar]
- [57].Rae Irene and Neustaedter Carman. 2017. Robotic telepresence at scale. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems. 313–324. [Google Scholar]
- [58].Broekens Joost, Heerink Marcel, and Rosendal Henk. 2009. Assistive social robots in elderly care: A review. Geron-technology 8, 2 (2009), 94–103. [Google Scholar]
- [59].Sabelli Alessandra Maria, Kanda Takayuki, and Hagita Norihiro. 2011. A conversational robot in an elderly care center: An ethnographic study. In 2011 6th ACM/IEEE International Conference on Human-robot Interaction (HRI’11). IEEE, 37–44. [Google Scholar]
- [60].Tsai Tzung-Cheng, Hsu Yeh-Liang, Ma An-I., King Trevor, and Wu Chang-Huei. 2007. Developing a telepresence robot for interpersonal communication with the elderly in a home environment. Telemedicine and e-Health 13, 4 (2007), 407–424. [DOI] [PubMed] [Google Scholar]
- [61].Cha Elizabeth, Chen Samantha, and Mataric Maja J.. 2017. Designing telepresence robots for K-12 education. In 2017 26th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN’17). IEEE, 683–688. [Google Scholar]
- [62].Velinov Aleksandar, Koceski Saso, and Koceska Natasa. 2021. A review of the usage of telepresence robots in education. Balkan Journal of Applied Mathematics and Informatics 4, 1 (2021), 27–40. [Google Scholar]
- [63].Ahumada-Newhart Veronica, Hwu Tiffany, Kashyap HIrak, Tian Yi, Mirzakhanian Lara, Minton Mikayla, Seader Steven, Hedden Sarah, Moore Douglas, Krichmar Jeffrey L., and Eccles Jacquelynne. 2023. Evaluation of the Toyota human support robot (HSR) for social interaction and learning. International Journal of Technology, Knowledge, and Society 19, 1 (2023), 21–52. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [64].Brock Heike, Šabanović Selma, and Gomez Randy. 2021. Remote you, Haru and me: Exploring social interaction in telepresence gaming with a robotic agent. In Companion of the 2021 ACM/IEEE International Conference on Human-robot Interaction. 283–287. [Google Scholar]
- [65].Bryson Joanna and Winfield Alan. 2017. Standardizing ethical design for artificial intelligence and autonomous systems. Computer 50, 5 (2017), 116–119. [Google Scholar]
- [66].Awad Edmond, Dsouza Sohan, Kim Richard, Schulz Jonathan, Henrich Joseph, Shariff Azim, Bonnefon Jean-François, and Rahwan Iyad. 2018. The moral machine experiment. Nature 563, 7729 (2018), 59–64. [DOI] [PubMed] [Google Scholar]
- [67].Wigfield Allan and Eccles Jacquelynne S.. 2000. Expectancy–value theory of achievement motivation. Contemporary Educational Psychology 25, 1 (2000), 68–81. [DOI] [PubMed] [Google Scholar]
- [68].Eccles Jacquelynne S. and Wigfield Allan. 1995. In the mind of the actor: The structure of adolescents’ achievement task values and expectancy-related beliefs. Personality and Social Psychology Bulletin 21, 3 (1995), 215–225. [Google Scholar]
- [69].Eccles Jacquelynne S. and Wigfield Allan. 2002. Motivational beliefs, values, and goals. Annual Review of Psychology 53, 1 (2002), 109–132. [DOI] [PubMed] [Google Scholar]
- [70].Mays Nicholas and Pope Catherine. 2000. Assessing quality in qualitative research. BMJ 320, 7226 (2000), 50–52. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [71].Pope Catherine and Mays Nick. 1995. Qualitative research: Reaching the parts other methods cannot reach: An introduction to qualitative methods in health and health services research. BMJ 311, 6996 (1995), 42–45. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [72].Yin Robert K.. 1994. Discovering the future of the case study. Method in evaluation research. Evaluation Practice 15, 3 (1994), 283–290. [Google Scholar]
- [73].Stake Robert E.. 2010. Qualitative Research: Studying How Things Work. Guilford Press, New York, 244 pages. [Google Scholar]
- [74].Glaser BG and Strauss AL. 1967. The Discovery of Grounded Theory: Strategies for Qualitative Research. Aldine Publishing, Chicago, 271 pages. [Google Scholar]
- [75].Patton Michael Quinn. 2002. Qualitative Research and Evaluation Methods. Sage Publications, Thousand Oaks, CA. [Google Scholar]
- [76].Eccles Jacquelynne S.. 2005. Subjective task value and the Eccles et al. model of achievement-related choices. In Handbook of Competence and Motivation. Elliot Andrew J. and Dweck Carol S. (Eds.). Guilford Press, New York, 105–121. [Google Scholar]
- [77].Saldaña Johnny. 2021. The Coding Manual for Qualitative Researchers. Sage. [Google Scholar]
- [78].O’Connor Cliodhna and Joffe Helene. 2020. Intercoder reliability in qualitative research: Debates and practical guidelines. International Journal of Qualitative Methods 19 (2020), 1609406919899220. [Google Scholar]
- [79].Grimm CM and Thomasen K. 2021. On the practicalities of robots in public spaces. In WeRobot 2021. [Google Scholar]
- [80].Evans Henry. 2014. Drones for humanity. The Futurist 48, 2 (2014), 39. [Google Scholar]
- [81].Raiti John Giulian, Jenkins Odest Chadwicke, and Lux-Fawzi Alice. 2014. Empower: Enhanced movement and physical-augmentation through web-enabled robots. In 2014 AAAI Fall Symposium Series. [Google Scholar]