

Abstract
Objective:
To evaluate the driving performance and usability of a mobility enhancement robot (MEBot) wheelchair with 2 innovative dynamic suspensions compared with commercial electric powered wheelchair (EPW) suspensions on non-American with Disabilities Act (ADA) compliant surfaces. The 2 dynamic suspensions used pneumatic actuators (PA) and electro-hydraulic with springs in series electrohydraulic and spring in series (EHAS).
Design:
Within-subjects cross-sectional study. Driving performance and usability were evaluated using quantitative measures and standardized tools, respectively.
Setting:
Laboratory settings that simulated common EPW outdoor driving tasks.
Participants:
10 EPW users (5 women, 5 men) with an average age of 53.9±11.5 years and 21.2±16.3 years of EPW driving experience (N=10).
Intervention:
Not applicable.
Main Outcome Measure(s):
Seat angle peaks (stability), number of completed trials (effectiveness), Quebec User Evaluation of Satisfaction with Assistive Technology (QUEST), and systemic usability scale (SUS).
Results:
MEBot with dynamic suspensions demonstrated significantly better stability (all P<.001) than EPW passive suspensions on non-ADA-compliant surfaces by reducing seat angle changes (safety). Also, MEBot with EHAS suspension significantly completed more trials over potholes compared with MEBot with PA suspension (P<.001) and EPW suspensions (P<.001). MEBot with EHAS had significantly better scores in terms of ease of adjustment (P=.016), durability (P=.031), and usability (P=.032) compared with MEBot with PA suspension on all surfaces. Physical assistance was required to navigate over potholes using MEBot with PA suspension and EPW suspensions. Also, participants reported similar responses regarding ease of use and satisfaction toward MEBot with EHAS suspension and EPW suspensions.
Conclusions:
MEBot with dynamic suspensions improve safety and stability when navigating non-ADA-compliant surfaces compared with commercial EPW passive suspensions. Findings indicate MEBot readiness for further evaluation in real-world environments.
Keywords: Architectural barriers, Automation, Fall prevention, Rehabilitation, Robotics, User-centered design
Tips and falls are frequent consequences of wheelchair-related collisions in community settings.1 There are 5.5 million wheelchair users in the US, 500,000 of whom benefit from electric powered wheelchairs (EPWs).2 EPWs play a key role in providing mobility, independence, and participation in the community for people with disabilities. However, EPWs do not overcome all barriers to mobility. Studies have shown that EPW users face mobility difficulties when executing community-related activities due to exposure to environmental barriers.3,4 For instance, driving over steep ramps and irregular surfaces5–7 may cause tips and falls due to loss of stability and compromised spatial awareness.1,8–11 Other examples are curb cuts that are usually present at intersections for wheelchair accessibility’ but only half of them meet the ramp slope criterion of ≤1:12 (4.5° slope).12 Attempting to drive over such environmental barriers may damage EPWs and injure users when these irregular surfaces are misjudged.13 Furthermore, Xiang et al reported more than 100,000 wheelchair-related injuries per year in the US of which 57% of collisions were due to tips and falls that occurred in environments with ramps, curbs, and stairs.14
In an interview with 1022 Veterans who own EPWs, interviewees highlighted the need for wheelchairs that could self-adjust or assist in overcoming obstacles.15 Commercially available robotic wheelchairs16–19 use dynamic suspensions constituted of actuated wheel arms and sensors that detect the surface inclination to automatically adjust their seat when driving on ramps, including stairs,20,21 but with limited to no lateral dynamic stability. Other robotic wheelchairs in development22,23 use similar suspensions with more degrees of freedom to overcome surface thresholds and uneven surfaces in all directions. However, these dynamic suspensions require driving at slow speeds with dimensions that may make navigating indoors difficult. Also, to the authors’ knowledge, these robotic wheelchairs are not equipped with the seating capabilities required for people with more complex mobility impairments. Furthermore, there is a paucity of research evaluating emerging robotic wheelchairs with end-users, suggesting the need to conduct a systematic usability evaluation to address mobility needs of people with disabilities.24
The following study introduces a mobility enhancement robot (MEBot) to increase the stability of EPW users when driving on non-American with Disabilities Act (ADA)-compliant surfaces. The MEBot wheelchair consists of a dynamic suspension of 6 independent height-adjustable wheels with a modular drive-wheel configuration, omni-wheels as caster wheels to eliminate swivel (eg, caster management), and a footprint comparable with commercially available EPWs.25 These features provide the unique ability to adjust the seat orientation to increase stability in lateral and anterior/posterior directions regardless of the surface inclination.9 The first dynamic suspension of MEBot consisted of pneumatic actuators (PA) with gas springs in parallel to replace the shock absorbers of common EPW suspensions (fig 1a). MEBot with PA suspension required wheelchair users to manually control each wheel’s height to adjust the seat orientation. This prototype was presented to 10 wheelchair users who highlighted the benefits of tip prevention on uneven surfaces; however, they also addressed the high task load demand to operate the PA suspension.26 Therefore, MEBot with PA was implemented to self-adjust its seat when facing uneven surfaces.27 A usability evaluation demonstrated better stability through less angle variation using MEBot with PA suspension compared with EPW suspension on inclined surfaces.28 On the other hand, participants reported discomfort due to unnecessary seat adjustments and a delay to level its seat. To address EPW user feedback, MEBot was optimized with a dynamic suspension of electrohydraulic and spring in series (EHAS) with shock absorbers in series (fig 1b–c).29 We hypothesized that these design modifications may offer faster and smoother seat stabilization when traversing on inclined and uneven surfaces.
Fig 1.
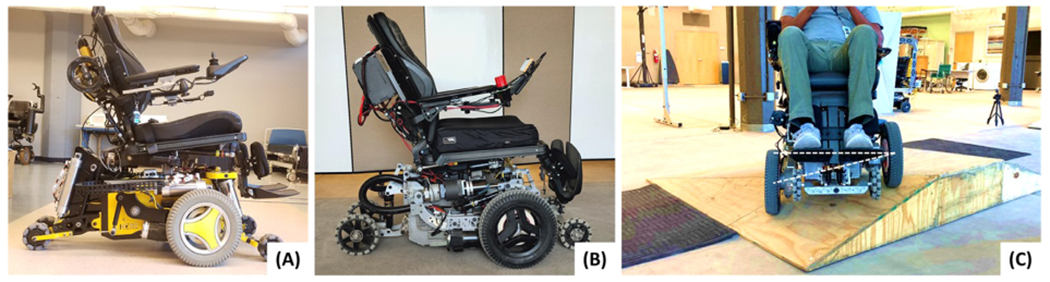
MEBot with (A) MEBot-PA suspension and (B) MEBot-EHAS suspension. (C) MEBot with EHAS dynamic suspension adjusting its seat orientation on a curb cut. Dashed Lines represented the seat and ground orientation difference with respect to a horizontal plane.
The study aims to evaluate the driving performance and user’s perception toward MEBot with PA and EHAS dynamic suspensions compared with commercial EPW suspensions when driving on non-ADA-compliant surfaces. A second aim is to evaluate the design improvement between the dynamic suspensions in MEBot using quantitative measures. We hypothesized that participants will demonstrate better driving performance in terms of stability (Hypothesis 1) and completed tasks (Hypothesis 2) when using MEBot with EHAS suspension compared with MEBot with PA suspension and commercial EPW suspensions. We also anticipate that participants will be more satisfied when using MEBot with EHAS suspension compared with when they use MEBot with PA suspension and commercial EPW suspension (Hypothesis 3). Lastly, we expect that participants would find MEBot with EHAS suspensions easier to use on non-ADA-compliant surfaces than MEBot with PA suspension and commercial EPW suspensions (Hypothesis 4).
Methods
Participants
A convenience sample of 10 participants was recruited for the study. The inclusion criteria were as follows: 18 years of age or older, weight of less than 113.4 kg, able to tolerate sitting for 2 hours, having at least 1 year of experience using an EPW in indoor and outdoor environments, and using an EPW as primary means of mobility (>8 hours per day). Participants with pressure injuries or who reported back, pelvic or thigh pain were excluded from the study. The study was approved by the Veterans Affairs Pittsburgh Healthcare System Institutional Review Board. All participants provided informed consent to participate. The study was conducted at the Human Engineering Research Laboratories. The study protocol was approved by the Veterans Affairs Institutional Review Board (Study ID: PRO00003113).
Setting
Driving tasks simulated common real-world outdoor situations that put individuals at risk for tips and falls. The tasks were driving up and down a 10° ramp, an 8° compound ramp, and a series of potholes (fig 2). The maximum inclined ramps of 10° were based on the International Organization for Standardization (ISO) 7176-2: Wheelchair Dynamic Stability.30 Furthermore, the compound ramp simulated curb cuts and cross slopes. Potholes were based on standardized wheelchair skills training31 simulating damaged or uneven roads. Their dimensions were up to 300 mm in diameter and 50 mm in depth.
Fig 2.

Driving tasks simulating non-ADA-compliant surfaces: (A) curb cut, (B) 10° ramp, and (C) series of potholes.
Protocol
Participants were asked to complete a general questionnaire about demographics and information about their current EPW, history of wheelchair collisions, and commonly encountered driving environments. After completing the questionnaire, participants were randomized in the order of use of 3 different EPWs (MEBot with EHAS suspension, MEBot with PA suspension, and their own EPW). The driving parameters and seating system of MEBot were configured to meet the characteristics of each participant’s own EPW by a physical therapist with over 20 years of experience in EPW provision. Each MEBot used a commercial EPW controller with a joystick familiar to the participants. A researcher experienced in the design and use of MEBot provided a video demonstration and training of MEBot mobility applications. Furthermore, participants drove with the 3 different EPWs in the driving tasks before the trials began to reduce potential bias by allowing participants to become familiar with the MEBot and driving tasks. The training continued until the participant and study personnel came to agreement that participant was proficient. The average training time to get used to MEBot was approximately 15 minutes.
After training, participants completed 5 trials of 3 driving tasks that simulated uneven surfaces with each EPW (total=45 trials). For safety, a clinical investigator and 2 spotters followed each participant throughout the driving tasks to bring the EPW to an immediate halt if a risk was perceived, the speed of each EPW was constrained to a maximum of 2.5 m/s.
After driving with an EPW, participants were asked to complete the Quebec User Evaluation of Satisfaction with Assistive Technology (QUEST)32,33 and the systemic usability scale (SUS).34 Participants had no time limit to complete the questionnaires. Also, participants were asked to justify responses with maximum or minimum scores to explore possible implementation on MEBot and/or their EPW. In addition, quantitative driving metrics were collected to measure the stability and effectiveness of the 3 EPW suspensions to navigate each driving task. The protocol lasted approximately 2 hours.
Outcome measures
Usability scale
The SUS measures the usability of a device to perform tasks. The questionnaire includes 10 questions rated on a 5-point Likert scale, 1—“Strongly Disagree” to 5—“Strongly Agree”.34 The overall score ranges from 0 to 100 in which a SUS score of 69 is considered an acceptable score of usability among different studies.35 Each assessment tool included a comment section in each subscale in which participants could describe their responses.
Satisfaction questionnaire
QUEST is an assessment tool to measure user satisfaction with assistive technology33,36 ranking 8 questions on a 5-point Likert scale from “Not Satisfied at all”, “Not very satisfied”, “More or less satisfied”, “Satisfied”, to “Very Satisfied”. Additionally, QUEST provides 4 questions to measure assistive technology concerning service delivery, which was not used in this study. Scores on QUEST subdomains were calculated individually. These subdomains were as follows: dimensions, weight, ease of adjustment, safety, durability, ease of use, comfort, and whether the device was effective for the participant’s needs. Furthermore, the QUEST contains a comments section to allow participants to add further details about each subdomain.
Quantitative driving metrics
The seat angle peaks in the anterior/posterior (pitch) and lateral (roll) direction were collected for each trial to measure the least stable configuration of the EPW. The seat angle peaks were measured with an inertial measurement unit (IMU) sensor placed under the seat and center of each EPW to minimize sensor calibration due to offset location. The seat angle peaks were measured in relation to a horizontal plane at a sampling rate of 100 Hz. A trial was considered complete when participants did not require physical assistance from spotters.
Data analysis
Outcome measures results and responses to the demographics questionnaires were examined using descriptive analysis (eg, means, standard deviation) and graphical techniques (eg, box plots, margin errors). Normality was evaluated using the Shapiro-Wilk test. Wheelchair stability (Hypothesis 1) was analyzed using a 2-way repeated-measures analysis of variance to compare the seat angles between EPW suspensions in each driving task and a Chi-squared test to compare the number of completed trials (Hypothesis 2) between EPW suspensions. Differences in perception in terms of satisfaction (Hypothesis 3) and usability (Hypothesis 4) toward each EPW were analyzed using nonparametric Friedman’s and Wilcoxon signed-rank tests. All statistical analyses were performed in IBM SPSS v27.0a. The level of significance was set α=0.05 for all comparisons.
Results
Ten EPW users (5 men, 5 women) with an average age of 53.9±11.47 years old and EPW driving experience of 21.2±16.3 years were recruited for the study. All participants used a joystick as the primary control method and reported having at least 1 power seating function (ie, tilt-in-space) (table 1).
Table 1.
Demographics
| Subject ID | Men | Age | Disability | Wheelchair Drive Configuration | Seating Functions |
|---|---|---|---|---|---|
| 1 | Women | 33 | SB | M3 (Mid-wheel) | TS, SE, LG, R |
| 2 | Men | 54 | SCI | M3 (Mid-wheel) | TS, SE, LG, R |
| 3 | Women | 52 | SCI | Q6 Edge (Mid-wheel) | TS, LG, R |
| 4 | Women | 60 | Skeletal dwarfism, SCI | F5 (Front-wheel) | TS, SE, LG, R |
| 5 | Women | 71 | SCI | F3 (Front-wheel) | TS, SE, LG, R |
| 6 | Men | 37 | Muscular dystrophy | 4Front (Front-wheel) | TS, SE, LG, R |
| 7 | Men | 56 | Glycogen storage disease type 3A | Q6 Edge (Mid-wheel) | TS, SE, LG, R |
| 8 | Men | 61 | SCI | S646 (Rear-wheel) | TS, LG, R |
| 9 | Women | 48 | Cerebral palsy | Q6 Edge (Mid-wheel) | TS |
| 10 | Men | 67 | Cerebral palsy | QM-710 (Mid-wheel) | TS, LG, R |
Abbreviations: LG, elevating leg rests; R, recline; SB, spina bifida; SCI, spinal cord injury; SE, seat elevation; TS, tilt-in-space.
Participants reported that they encountered several challenging terrains more than 3 times per week. This included driving up and down ramps (n=7), driving on cross slopes (n=3), and driving on curb cuts (n=5) without assistance. Six participants stated they typically encountered potholes, but half stated they avoided them if possible. Nine participants reported to encounter curbs more than 3 times per week, 7 of whom drove over curbs without assistance and 2 avoided curbs. The curb characteristics were not reported in this study.
Driving performance
A trial was considered incomplete if the user required physical assistance or was unable to complete the trial. All participants (n=10) successfully drove up and down the 10° ramp with the 3 EPWs (table 2). Participants using MEBot with EHAS suspension completed significantly more trials on the potholes compared with when they used MEBot with the PA suspension (P<.001) and their own EPW suspensions (P<.001). One participant did not attempt the potholes and curb cuts tasks with the MEBot with PA suspension due to discomfort and 3 participants did not attempt the potholes with their own EPW suspension for different reasons: (1) fear of wheelchair breakdown, (2) low EPW batteries, and (3) considered unsafe by spotters. The average driving speed across all tasks was 0.31 m/s.
Table 2.
Mean and standard deviation results of EPWs’ performance when driving on each driving task
| Outcome Measures | MEBot With EHAS | MEBot With PA | EPW Suspensions | ||
|---|---|---|---|---|---|
| 10° Ramp | Seat angle peaks (degrees) | Pitch*,† | 4.6±1.2 | 4.3±1.8 | 17.8±7.3 |
| Roll*,†,‡ | 1.2±0.9 | 3.4±1.9 | 0.3±1.1 | ||
| Number of completed trials | 50 | 50 | 50 | ||
| Curb cuts | Seat angle peaks (degrees) | Pitch*,† | 5.6±1.3 | 4.6±2.0 | 18.3±10.0 |
| Roll * ,†,‡ | 4.4±2.9 | 5.9±3.6 | 9.6±1.6 | ||
| Number of completed trials | 50 | 45 | 46 | ||
| Potholes | Seat angle peaks (degrees) | Pitch*,† | 3.1±0.7 | 4.8±1.6 | 10.5±7.6 |
| Roll*,†,‡ | 4.4±1.1 | 6.5±1.9 | 5.6±4.1 | ||
| Number of completed trials*,‡ | 48 | 17 | 10 | ||
P<.05, statistically significant with Bonferroni correction between MEBot with EHAS vs Own EPW.
P<.05, statistically significant with Bonferroni correction between MEBot with PA vs Own EPW.
P<.05, statistically significant with Bonferroni correction between MEBot with EHAS vs MEBot with PA.
MEBot with both dynamic suspensions had significantly lower seat angle peaks than commercial EPW suspensions throughout all tasks, but no significant differences in anterior/posterior seat angles between MEBot dynamic suspensions when driving on the 10° ramp and curb cuts. MEBot with EHAS suspension had significantly less lateral seat angle change (roll direction) compared with MEBot with the PA suspension (P<.001) and EPW suspensions (P=.003) across all tasks. In addition, the MEBot with EHAS suspension had significantly lower seat angle changes than MEBot with PA suspension and EPW suspensions when traversing the potholes (table 2).
User’s satisfaction
Participants rated significantly higher satisfaction when using MEBot with EHAS suspension compared with MEBot with PA suspension in terms of ease of adjustment (P=.016), ease-of-use (P=.016), and durability (P=.031), but no statistically significant difference between MEBot with both suspensions and EPW suspensions were found (fig 3, table 3).
Fig 3.
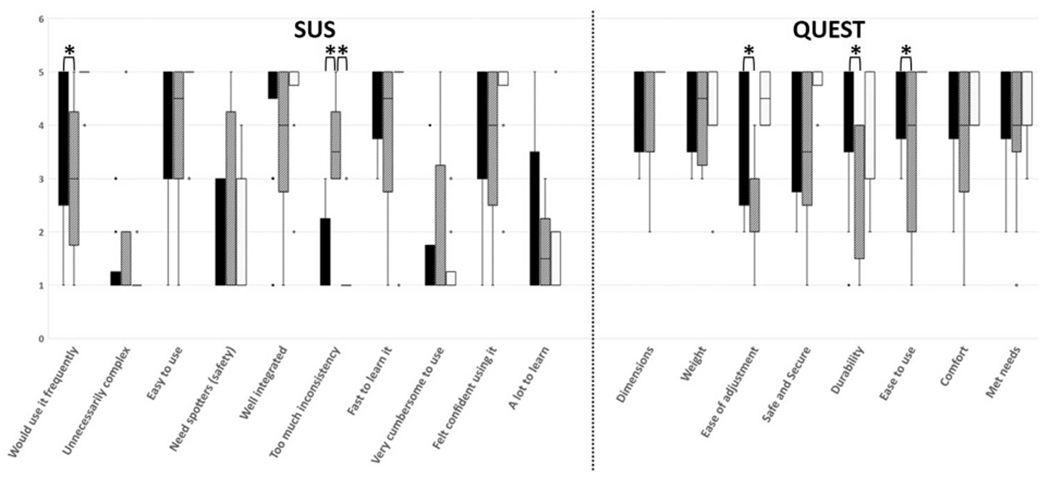
User’s perception toward own EPW (black), MEBot with PA (gray), and MEBot with EHAS (white) suspension on driving tasks. *Significant difference P<.05.
Table 3.
Median and interquartile (1-3) results of user’s perception toward each EPW
| Outcome Measures | MEBot With EHAS | MEBot With PA | Own EPW | |
|---|---|---|---|---|
| User satisfaction | Dimensions | 5.0 (5.0-5.0) | 5.0 (3.5-5.0) | 5.0 (3.5-5.0) |
| Weight | 5.0 (5.0-5.0) | 5.0 (4.0-5.0) | 5.0 (5.0-5.0) | |
| Ease of adjustment * | 5.0 (4.0-5.0) | 3.0 (2.0-3.0) | 5.0 (2.0-5.0) | |
| Safe and secure | 5.0 (4.75-5.0) | 3.5 (2.5-5.0) | 4.5 (2.75-5.0) | |
| Durability * | 5.0 (3.5-5.0) | 4.0 (1.5-4.0) | 4.0 (4.0-5.0) | |
| Ease to use * | 5.0 (5.0-5.0) | 4.0 (2.0-5.0) | 5.0 (3.75-5.0) | |
| Comfort | 5.0 (4.0-5.0) | 4.0 (2.75-5.0) | 5.0 (3.75-5.0) | |
| Effective to meet needs | 5.0 (4.0-5.0) | 4.0 (3.5-5.0) | 5.0 (3.75-5.0) | |
| Usability | Would use it frequently * | 5.0 (5.0-5.0) | 3.0 (1.75-4.25) | 3.5 (2.5-5.0) |
| Unnecessarily complex | 1.0 (1.0-1.0) | 1.0 (1.0-2.0) | 1.0 (1.0-1.25) | |
| Easy to use | 5.0 (5.0-5.0) | 4.5 (3.0-5.0) | 4.0 (3.0-5.0) | |
| Need spotters to use it (safety) | 1.0 (1.0-3.0) | 1.0 (1.0-4.25) | 1.0 (1.0-3.0) | |
| Well integrated | 5.0 (4.75-5.0) | 4.0 (2.75-5.0) | 5.0 (4.5-5.0) | |
| Too much inconsistency*,† | 1.0 (1.0-1.0) | 3.5 (3.0-4.25) | 1.0 (1.0-2.25) | |
| Fast to learn it | 5.0 (5.0-5.0) | 4.5 (2.75-5.0) | 5.0 (3.75-5.0) | |
| Very cumbersome to use | 1.0 (1.0-1.25) | 1.0 (1.0-3.25) | 1.0 (1.0-1.75) | |
| Felt confident using it | 5.0 (4.75-5.0) | 4.0 (2.5-5.0) | 4.5 (3.0-5.0) | |
| A lot to learn | 1.0 (1.0-2.0) | 1.5 (1.0-2.25) | 1.0 (1.0-3.5) | |
| Overall SUS score * | 98 (90-100) | 73 (54.5-84.75) | 85 (62.5-100) |
P<.05, statistically significant between MEBot with EHAS vs MEBot with PA.
P<.05, statistically significant between MEBot with PA vs Own EPW.
Usability measures
Participants agreed that they would use MEBot with EHAS suspension more frequently (P=.017) than MEBot with PA suspension. Also, participants agreed that MEBot with PA suspension showed too much inconsistency during driving tasks compared with MEBot with EHAS suspension (P=.007) and their EPWs (P=.006).
Overall, MEBot with EHAS suspension received a significantly higher usability score of 91.3±17.6 (P=.032) compared with MEBot with PA suspension (66.5±25.5) and better, yet not statistically significant, SUS score than their own EPW (80.3±19.2).
Discussion
The study evaluated MEBot with 2 innovative dynamic suspensions to improve the stability and comfort of EPW users when driving on non-ADA-compliant surfaces. To the authors’ knowledge, this is the first study evaluating the stability of a robotic wheelchair suspension with end-users following a systematic evaluation. Furthermore, the study adopts quantitative and standardized metrics to promote a standardized comparison among emerging robotic wheelchairs.
The results supported Hypothesis 1 in that the dynamic suspensions incorporated in MEBot reduced changes in the seat orientation compared with commercial EPW suspensions on uneven surfaces, therefore increasing stability. A reason for higher seat angles in EPW suspensions could be that participants started with their seats tilted at an average set angle of 8.3±6.1°. Most participants slightly tilted their seats for seating comfort or to shift their weight and increase their stability before attempting the driving tasks. However, this requires constant manual adjustments. However, some participants forgot to readjust their EPW seats appropriately for the next tasks which increased their risk of tipping. Also, lateral tilt adjustment is not commonly prescribed in EPWs, which put users at risk of tipping when driving on the curb cuts and potholes.37
The MEBot with EHAS suspension had similar stability as MEBot with PA suspension in the anterior/posterior direction, but significantly better lateral stability in all driving tasks. The pneumatics in the MEBot with PA suspension caused inconsistencies in readjusting its seat which, in some instances, was considered unnecessary by participants. One participant felt unsafe driving over the curb cuts and potholes tasks. Also, participants reported that MEBot with PA suspension had a delay in readjusting its seat after crossing the driving tasks and inconsistent performance that participants reported as annoying and uncomfortable over time. These responses were consistent with the findings by Sivakanthan et al.28 The MEBot with EHAS suspension was designed to ameliorate these issues by providing a smoother and faster response when facing these terrains.
Hypothesis 2 was supported by the results that MEBot with EHAS suspensions completed more trials on ADA-non-compliant surfaces, particularly on potholes, compared with MEBot with PA suspension and commercial EPW suspensions. Most participants using MEBot with PA suspension and their own EPW required physical assistance to traverse the potholes because of the lack of traction or the tires getting stuck. In response, the research team provided driving strategies when participants used their EPW such as driving slowly to ameliorate shocks and improve tire grip to the surface, tilting their seat for better weight distribution, and slightly elevating their footrests to avoid collisions with surface thresholds. The ability of MEBot to actively shift its weight with EHAS suspension appeared to provide better traction between the tires and the surface to overcome all driving tasks. It is worth mentioning that the weight and dimensions of both MEBot wheelchairs (weight 181 kg, length of 1.3 m, and width of 0.68 m) were similar to participants’ EPWs as reported by their manufacturers, except for participant 7’s EPW, and did not contribute to their EPW driving performance. Also, 6 participants used middle drive EPW, 3 of whom did not complete the pothole task. Research has shown that EPWs with this wheel drive configuration are beneficial to maneuver in small spaces, but their small casters are prone to get stuck on uneven surfaces.38
No significant difference in satisfaction (Hypothesis 3) or usability (Hypothesis 4) was found when comparing MEBot with EHAS suspension and commercial EPW suspensions. These findings showed that participants found MEBot easy to use and fast to learn because of the similarities in driving performance and seating comfort as their EPWs. Also, the MEBot dynamic suspensions were designed to automatically adjust the seat, making the system intuitive enough to require minimum training. Participants reported significantly better ease of adjustment, durability, and usability of MEBot with EHAS compared with MEBot with PA suspension. The results demonstrated design improvements in MEBot dynamic suspension that offer a smoother response rate, fewer unwanted movements, and minimum delay to readjust its seat on uneven surfaces compared with its previous iteration, hence reducing EPW users’ discomfort and increasing seat stability.
It is worth noting the discrepancy in participants’ perception of safety when driving on uneven surfaces and least stable configurations (seat angle peaks) of commercial EPWs. Participants reported feeling safe when driving with their own EPW despite using large seat angles that could put users at risk of tipping. Quantitative metrics can serve as a stability monitoring system to alert users or adjust EPW driving parameters when driving on steep surfaces to prevent tips and falls. For example, an IMU was used in this study to quantify safety in terms of stability and as feedback to adjust the dynamic suspension to the surface inclination. Furthermore, a preliminary study used the IMU to quantify the EPW user’s discomfort when using EPW passive suspension and MEBot with EHAS suspension on surface thresholds29 which showed the benefits of both suspensions in maintaining a vibration exposure below the health caution zone.39
Study limitations
The first limitation is the risk of a Hawthorne effect. Participants were aware of being observed by researchers which may cause them to perform differently than their normal driving behavior. Second, the study had a small sample size which may have limited the statistical power of our analyses and ability to avoid Type 2 (false negative) errors with respect to user perceptions. The sample size was calculated based on a preliminary study that compared physical measures of the seat angle peaks between MEBot with PA suspension and commercial EPW suspensions driving on inclined surfaces with an effect size of 4.1±2.8,28 but not the qualitative surveys used here. Third, a ceiling effect was observed in the SUS and QUEST tools to evaluate user perception toward each EPW suspension. For this reason, MEBot with EHAS suspension reported a higher SUS score compared with commercial EPW suspensions, but no statistical differences were found. Lastly, this study was performed with driving tasks that simulated uneven surfaces in controlled settings. This eliminates weather conditions, surface irregularities, and other variables that could influence the EPWs’ performance. For instance, the wear and tear of tires of participants’ EPWs may had reduce traction and proper grip needed to navigate over potholes. Evaluating the testing devices in other driving conditions, particularly in real-world environments, may vary participants’ responses to minimize ceiling effects.
Conclusions
Overall, the study confirmed that the dynamic suspensions incorporated in MEBot were effective and beneficial in providing stability on non-ADA-compliant surfaces. Particularly, the findings demonstrated that the MEBot with EHAS suspension was considered safe, comfortable, and as easy to use as participants’ own EPW suspension. The findings also demonstrated the use of standardized metrics to compare the driving performance of MEBot suspensions and improve the literature of robotic wheelchair evaluation. These findings indicate MEBot readiness and safety for further evaluation in the community.
Acknowledgments
The authors would like to thank the Human Engineering Research Laboratories’ shop staff for their assistance with the design and development of the robotic wheelchairs; Ms Nikitha Deepak for her support as the clinical coordinator for this study. This material is the result of work supported with resources and the use of facilities at the VA Pittsburgh Healthcare System. The contents do not represent the views of the U.S. Department of Veterans Affairs or the United States Government.
This work was funded by the VA Career Development Awards (Grant #A3076 and #A3806) and VA Center for Wheelchairs and Robotics Engineering(Grant #B2988C).
List of abbreviations:
- ADA
American with Disabilities Act
- EPW
electric powered wheelchair
- EHAS
electrohydraulic and spring in series
- IMU
inertial measurement unit
- MEBot
mobility enhancement robot
- PA
pneumatic actuators
- QUEST
Quebec User Evaluation of Satisfaction with Assistive Technology
- SUS
systematic usability scale
Footnotes
Disclosures: None.
Suppliers
SPSS version 27.0; SPSS.
References
- 1.Rice LA, Sung J, Peters J, Bartlo WD, Sosnoff JJ. Perceptions of fall circumstances, injuries and recovery techniques among power wheelchair users: a qualitative study. Clin Rehabil 2018;32:985–93. [DOI] [PubMed] [Google Scholar]
- 2.Bureau UC. Americans with Disabilities: 2014. Available at: https://www.census.gov/content/dam/Census/library/publications/2018/demo/p70-152.pdf. Accessed November 29, 2019.
- 3.Meyers AR, Anderson JJ, Miller DR, Shipp K, Hoenig H. Barriers, facilitators, and access for wheelchair users: sbstantive and methodologic lessons from a pilot study of environmental effects. Soc Sci Med 2002;55:1435–46. [DOI] [PubMed] [Google Scholar]
- 4.Harris F, Yang H-Y, Sanford J. Physical environmental barriers to community mobility in older and younger wheelchair users. Top Geriatr Rehabil 2015;31:42–51. [Google Scholar]
- 5.Frost KL, Bertocci G, Smalley C. Ramps remain a barrier to safe wheelchair user transit bus ingress/egress. Disabil Rehabil Assist Technol 2020;15:629–36. [DOI] [PubMed] [Google Scholar]
- 6.Park J, Chowdhury S. Investigating the barriers in a typical journey by public transport users with disabilities. J Transp Health 2018;10:361–8. [Google Scholar]
- 7.Bills KL. Maneuverability experiences faced by individuals who use wheelchairs in rural settings: a qualitative analysis. Contemp Rural Soc Work J 2017;9:10 [Google Scholar]
- 8.Thomas L, Borisoff J, Sparrey CJ. Manual wheelchair downhill stability: an analysis of factors affecting tip probability. J Neuroeng Rehabil 2018;15:95. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 9.Daveler B, Salatin B, Grindle GG, Candiotti J, Wang H, Cooper RA. Participatory design and validation of mobility enhancement robotic wheelchair. J Rehabil Res Dev 2015;52:739–50. [DOI] [PubMed] [Google Scholar]
- 10.Chen WY, Jang Y, Wang JD, et al. Wheelchair-related accidents: relationship with wheelchair-using behavior in active community wheelchair users. Arch Phys Med Rehabil 2011;92:892–8. [DOI] [PubMed] [Google Scholar]
- 11.Edwards K, Mccluskey A. A survey of adult power wheelchair and scooter users. Disabil Rehabil Assist Technol 2010;5:411–9. [DOI] [PubMed] [Google Scholar]
- 12.Bennett S, Lee Kirby R, Bennett S, Lee Kirby R, Macdonald B. Wheelchair accessibility: descriptive survey of curb ramps in an urban area. Disabil Rehabil Assist Technol 2009;4:17–23. [DOI] [PubMed] [Google Scholar]
- 13.Henderson GV, Boninger ML, Dicianno BE, Worobey LA. Type and frequency of wheelchair repairs and resulting adverse consequences among veteran wheelchair users. Disabil Rehabil Assist Technol 2020: 1–7. [DOI] [PubMed] [Google Scholar]
- 14.Xiang H, Chany A, Smith GA. Wheelchair related injuries treated in USA emergency departments. Injury Prev 2006;12:8–11. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 15.Dicianno BE, et al. The voice of the consumer: a survey of Veterans and other users of assistive technology. Mil Med 2018;183:e518–25. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 16.Uustal H, Minkel JL. Study of the Independence IBOT 3000 Mobility System: an innovative power mobility device, during use in community environments. Arch Phys Med Rehabil 2004;85:2002–10. [DOI] [PubMed] [Google Scholar]
- 17.Reach. Climb. Go Available at: https://mobiusmobility.com/. Accessed November 1, 2020.
- 18.Cheelcare Xceed. Available at: https://cheelcare.com/pages/cheelcare-xceed. Accessed March 8, 2023.
- 19.Viking 4x4. Available at: https://www.discovermymobility.com/. Accessed May 13, 2023.
- 20.Sundaram SA, Wang H, Ding D, Cooper RA. Step-climbing power wheelchairs: a literature review. Top Spinal Cord Inj Rehabil 2017; 23:98–109. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 21.Leaman J, La HM. A comprehensive review of smart wheelchairs: past, present, and future. IEEE Trans Hum Mach Syst 2017;47 (4):486–99. [Google Scholar]
- 22.Nakajima S A new personal mobility vehicle for daily life: improvements on a new RT-Mover that enable greater mobility are showcased at the Cybathlon. IEEE Robot Autom Mag 2017;24:37–48. [Google Scholar]
- 23.Ning M, Yu K, Zhang C, Wu Z, Wang Y. Wheelchair design with variable posture adjustment and obstacle-overcoming ability. J Braz Soc Mech Sci Eng 2021;43:1–21. [Google Scholar]
- 24.Sivakanthan S, Candiotti JL, Sundaram SA, et al. Mini-review: robotic wheelchair taxonomy and readiness. Neurosci Lett 2022;772:136482. 10.1016/j.neulet.2022.136482. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 25.Cooper RA, Wang H, Chung CS, et al. Patent No 10,912,688 Mobility enhancement wheelchair Google. Patents 2021. [Google Scholar]
- 26.Candiotti JL, Kamaraj DC, Daveler B, et al. Usability evaluation of a novel robotic power wheelchair for indoor and outdoor navigation. Arch Phys Med Rehabil 2019;100:627–37. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 27.Candiotti JL, Wang H, Chung CS, et al. Design and evaluation of a seat orientation controller during uneven terrain driving. Med Eng Phys 2016;38:241–7. [DOI] [PubMed] [Google Scholar]
- 28.Sivakanthan S, et al. Usability evaluation of attitude control for a robotic wheelchair for tip mitigation in outdoor environments. Med Eng Phys 2020;82:86–96. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 29.Candiotti JL, Neti A, Sivakanthan S, Cooper RA. Analysis of whole-body vibration using electric powered wheelchairs on surface transitions. Vibration 2022;5:98–109. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 30.American National Standard for Wheechairs – Volume 2: additional requirements for wheelchairs (including scooters) with electrical systems. ANSI/RESNA; 1998. [Google Scholar]
- 31.Kirby RL, Swuste J, Dupuis DJ, MacLeod DA, Monroe R. The wheelchair skills test: a pilot study of a new outcome measure. Arch Phys Med Rehabil 2002;83:10–8. [DOI] [PubMed] [Google Scholar]
- 32.Choi YM, Sprigle SH. Approaches for evaluating the usability of assistive technology product prototypes. Assist Technol 2011;23:36–41. [Google Scholar]
- 33.Demers L, Weiss-Lambrou R, Ska B. The Quebec User Evaluation of Satisfaction with Assistive Technology (QUEST 2.0): an overview and recent progress. Technol Disabil 2002;14:101–5. [Google Scholar]
- 34.Brooke J SUS-A quick and dirty usability scale. Usability evaluation in industry. CRC Press; 1996. p. 4–7. [Google Scholar]
- 35.Bangor A, Kortum P, Miller J. Determining what individual SUS scores mean: adding an adjective rating scale. J Usability Stud 2009;4:114–23. [Google Scholar]
- 36.Demers L, Fuhrer MJ, Jutai JW, Scherer MJ, Pervieux I, DeRuyter F. Tracking mobility-related assistive technology in an outcomes study. Assist Technol 2008;20:73–85. [DOI] [PubMed] [Google Scholar]
- 37.Erickson B, Hosseini MA, Mudharet PS, et al. The dynamics of electric powered wheelchair sideways tips and falls: experimental and computational analysis of impact forces and injury. J Neuroeng Rehabil 2016;13:1–10. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 38.Ding D, Cooper RA. Electric powered wheelchairs. IEEE Control Syst 2005;25:22–34. [Google Scholar]
- 39.I. ISO. 2631-1: Mechanical vibration and shock—evaluation of human exposure to whole-body vibration—Part 1: general requirements. Geneva, Switzerland: ISO; 1997. [Google Scholar]