

Abstract
The proposed methodology presents a comprehensive analysis of soft sensor modeling techniques for air ozone prediction. We compare the performance of three different modeling techniques: LR (linear regression), NN (neural networks), and RFR (random forest regression). Additionally, we evaluate the impact of different variable sets on prediction performance. Our findings indicate that neural network models, particularly the RNN (recurrent neural networks), outperform the other modeling techniques in terms of prediction accuracy. The proposed methodology evaluates the impact of different variable sets on prediction performance, finding that variable set E demonstrates exceptional performance and achieves the highest average prediction accuracy among various software sensor models. In comparing variable set E and A, B, C, D, it is observed that the inclusion of an additional input feature, PM10, in the latter sets does not improve overall performance, potentially due to multicollinearity between PM10 and PM2.5 variables. The proposed methodology provides valuable insights into soft sensor modeling for air ozone prediction.Among the 72 sensors, sensor NNR[Y]C outperforms all other evaluated sensors, demonstrating exceptional predictive performance with an impressive R2 of 0.8902, low RMSE of 24.91, and remarkable MAE of 19.16. With a prediction accuracy of 81.44%, sensor NNR[Y]C is reliable and suitable for various technological applications.
Subject terms: Environmental chemistry, Scientific data, Statistics
Introduction
Background and importance of air ozone prediction
Air pollution, including compounds such as ozone, has become a global concern due to its detrimental effects on human health and the environment1,2. Ozone is a reactive gas formed through complex photochemical reactions involving precursor pollutants such as nitrogen oxides (NOx) and volatile organic compounds (VOCs)3–5. Elevated ozone levels in the atmosphere can contribute to respiratory issues, cardiovascular diseases, and lung inflammation in humans. It can also harm plants, reduce crop yields, and disrupt ecosystems. Accurately predicting ozone concentrations in the air is crucial for effective air quality management and the development of appropriate mitigation strategies. By forecasting ozone levels, policymakers, environmental agencies, and health professionals can take timely measures to reduce exposure and mitigate the potential health and ecological risks associated with high ozone concentrations. This can include implementing emission controls, adjusting industrial activities, and raising awareness among vulnerable populations.
Soft sensor modeling for air ozone prediction and its significance
Soft sensor modeling, also known as virtual sensing or data-driven modeling, enables the estimation of specific physical or chemical parameters using available data and mathematical models6–8. In the context of air ozone prediction, soft sensor modeling involves constructing models using relevant environmental variables such as meteorological data, pollutant concentrations and historical ozone measurements to predict ozone levels in real-time or for future periods. This approach allows for the development of virtual sensors that provide continuous estimates of ozone concentrations, even in cases where physical sensors are not present or practical to deploy9,10. The significance of soft sensor modeling lies in its ability to overcome limitations associated with physical sensors, such as cost, maintenance, and limited coverage. Soft sensors offer a cost-effective and flexible alternative for ozone prediction, enabling widespread monitoring and forecasting of ozone concentrations. Furthermore, soft sensor models can be continuously updated and optimized using new data, providing accurate and up-to-date information for decision-makers in air quality management and public health.
Objectives of the study
The main objectives of this study are to compare and evaluate the performance of different soft sensor modeling techniques for air ozone prediction. Specifically, we will compare the effectiveness of linear regression, neural networks and random forests regression in predicting ozone concentrations. These techniques were chosen due to their widespread usage and demonstrated capabilities in modeling complex relationships in environmental systems. Through this comparative analysis, we aim to identify the most suitable modeling technique for air ozone prediction based on criterion such as predictive accuracy, efficiency and interpretability. Additionally, we seek to explore the strengths and limitations of each modeling approach and provide insights into their practical applications in air quality management and decision-making.
Literature review
Overview of linear regression, neural networks and random forests regression
Air ozone prediction has been an important area of research due to the detrimental effects of ozone pollution on human health and the environment11. In recent years, several studies have been conducted to develop and evaluate different methods for air ozone prediction. Here, we provide an overview of some key research findings and methodologies.
Linear regression
LR (Linear regression) is a popular and widely used modeling technique in statistics and machine learning. It aims to establish a linear relationship between the input variables and the target variable. The model assumes a linear combination of the input features to predict the continuous output variable. The coefficients of these input variables are estimated using various optimization algorithms, such as least squares. LR is simple to implement and interpret, making it a good choice for scenarios with linear relationships between variables. MLR (Multiple linear regression) is a form of LR that is suitable for this case. MLR provides equations linking a number of input variables (xn) to a target variable (y) using Eq. (1)12.
| 1 |
where w0 is the intercept, wn is a coefficient for xn and n is the number of input variables. Out-of-sample accuracy can be improved by using regularization methods which add a penalty term to the model input variables, shrinking the freedom of the input variable during learning.
Nonlinear extension refers to the use of nonlinear feature functions to transform independent variables in linear regression, in order to capture nonlinear relationships in the data.
In LR, we assume that there is a linear relationship between the independent variables and the dependent variable. However, in real-world data, there may exist nonlinear relationships, where the relationship between the independent variables and the dependent variable cannot be accurately described by a simple linear model.
To address this issue, we can use nonlinear extension. This means applying some nonlinear functions to the independent variables to introduce nonlinear features in the model, in order to better fit the nonlinear relationships in the data.
For example, if there is a quadratic relationship between the independent variable x and the dependent variable y, we can square the independent variable x to obtain x2 as a new independent variable, and then use both x and x2 as input variables to build a linear regression model. This way, the model can capture the quadratic relationship between x and y.MLR with nonlinear extension(MLR-NE) provides equations linking a number of input variables (xn) to a target variable (y) using Eq. (2).
| 2 |
In addition to using the square function, other nonlinear functions such as logarithmic, exponential and trigonometric functions can also be applied to transform the independent variables. This allows the model to adapt to more complex nonlinear relationships.
It is important to note that nonlinear extension can improve the fitting capability of the model and make it more suitable for nonlinear data. However, the resulting extended model may be more complex, less interpretable and have a risk of overfitting. Therefore, when performing nonlinear extension, a trade-off between the accuracy of model fitting and interpretability needs to be considered.
Data-driven models, such as regression-based approaches, have been widely used for air ozone prediction. Linear regression (LR) is a statistical modeling technique used to establish a linear relationship between a dependent variable and one or more independent variables. In air ozone prediction, LR models can be employed to identify correlations between ozone levels and relevant factors, such as temperature, humidity, wind speed and pollutant concentrations. Researchers have utilized various variables, including meteorological parameters, pollutant concentrations and emission data, to develop accurate prediction models. For example, Wei Zhao employed multiple linear regression to predict ozone levels based on boundary layer height, humidity, wind direction, surface solar radiation, total cloud cover and sea level pressure in Hong Kong13.
Neural networks
BPNN (Backpropagation Neural Networks) and RNN (Recurrent Neural Networks) are two commonly used artificial neural networks, respectively suitable for regression tasks and sequential data processing.
BPNN utilizes the backpropagation algorithm to train the network by iteratively adjusting the weights and biases of the neurons to minimize the difference between the predicted and actual output,as shown in Fig. 1. This iterative process helps the model capture complex non-linear relationships between input and output variables, making it suitable for various regression problems.
Figure 1.

BPNN model.
RNN is a type of neural networks designed to process sequential data, such as time series or text data. Unlike BPNN, RNN has a feedback mechanism that allows information to be carried forward through time loops, as shown in Fig. 2. This recurrent structure enables RNN to capture temporal dependencies and contextual information within the data. In regression tasks, RNN can model the sequence of input variables and predict the corresponding continuous output. They are particularly useful for problems where past inputs have a significant impact on current predictions.
Figure 2.

RNN model.
Machine learning techniques have gained popularity in air ozone prediction due to their ability to capture complex relationships in data. Neural networks are computational models inspired by the structure and functioning of biological neural networks. These models consist of interconnected nodes (neurons) organized in layers and are trained using optimization algorithms to learn complex patterns in the data. For air ozone prediction, neural networks can capture nonlinear relationships between predictor variables and ozone concentrations.Neural networks, including BPNN and RNN, have been utilized for ozone prediction. RNN possesses feedback connections that allow information to flow between different time steps, making them ideal for time series analysis and prediction. In air ozone prediction, RNN can effectively capture temporal dependencies and patterns in ozone data.RNN, in particular, has shown promise in capturing temporal dependencies and patterns in ozone data14,15. Wang Dongsheng et al. developed an RNN model to predict hourly ozone concentrations in air quality monitoring stations in the Yangtze River Delta, China16.
Random forest regression
RFR (random forest regression) is an ensemble learning technique that combines the power of decision trees and randomness. It constructs a multitude of decision trees using random subsets of the training data and randomly selected subsets of the input variables. Each decision tree makes independent predictions and the final prediction is obtained by averaging the predictions of all the trees,as shown in Fig. 3. RFR handles both linear and non-linear relationships, effectively captures complex interactions between input variables and is robust against overfitting. It is particularly suitable for high-dimensional data with categorical and numerical features and performs well even in the presence of outliers and missing values.
Figure 3.

RFR model.
Ensemble models, such as RFR (random forest regression) and gradient boosting, have also been applied for air ozone prediction17,18. RFR is an ensemble learning method that combines multiple decision trees to make predictions. Each decision tree is built using a random subset of features and the final prediction is determined by aggregating the predictions from individual trees. RFR is known for its robustness, ability to handle high-dimensional data and resistance to overfitting19. For instance, Massimo Stafoggia et al.21 used RFR to predict daily ozone concentrations in Sweden, considering various meteorological variables such as air temperature, cloud coverage, barometric pressure and snow albedo20.
Applications of methods in environmental prediction
LR, NN and RFR have been widely employed in various environmental prediction tasks beyond air ozone prediction.
Water quality prediction
These methods have found applications in areas such as water quality prediction. LR, NN and RFR have been used to predict water quality parameters, including dissolved oxygen levels, pH and nutrient concentrations21–23.
Air pollutant concentration modeling
NN and RFR have been applied to forecast concentrations of air pollutants, such as particulate matter (PM) and nitrogen dioxide (NO2)24,25.
Environmental impact assessment
LR and NN have been applied for environmental impact assessment, such as global warming, human health, metal depletion, freshwater ecotoxicity, particulate matter formation and terrestrial acidification26–28.
These examples highlight the versatility and effectiveness of these modeling techniques in addressing a range of environmental prediction tasks.
Performance in ozone prediction of prediction models
LR, NN and RFR are prediction models based on different principles and algorithms. LR predicts by fitting a linear relationship between input features and output variables. NN utilizes multi-layered neuron networks to establish nonlinear mapping relationships. RFR combines multiple decision tree models through ensemble learning to enhance prediction performance.
To accurately predict ozone concentrations and trends, various prediction methods have been employed.The performance of commonly used different prediction models in ozone prediction is compared as Table 1.
Table 1.
Methods used in ozone concentrations prediction.
| References | Variables/inputs | Targets/outputs | Performance | Model |
|---|---|---|---|---|
| 13 | Boundary layer height, humidity, wind direction, solar radiation, total cloud cover and sea level pressure, temperature | Surface ozone in Hong Kong | R20.62 | LR |
| 29 | Temperature, NO2, SO2, O3, PM10 | Future ozone concentration for next three days in Malaysia |
R20.296996 RMSE0.01853 |
LR |
| 30 | Temperature, NO2, NO, wind velocity, relative humidity | Ozone concentration of Northern Portugal |
R20.7 RMSE29.5 μg/m3 |
LR |
| 30 | Temperature, NO2, NO, wind velocity, relative humidity | Ozone concentration of Northern Portugal |
R20.78 RMSE25.64 μg/m3 |
BPNN |
| 31 | Meteorological parameters, NO2 | Ozone concentration of Nanjing |
R20.84 RMSE22.5 |
BPNN |
| 32 | Precipitation, barometric pressure relative humidity, sunshine duration temperature, wind speed | Ozone concentration of Jinan |
R20.8429 RMSE21.9290 |
BPNN |
| 15 | Temperature, dew point, relatively humidity, wind speed | Ozone concentration of Hangzhou |
R20.91 RMSE19.87 |
RNN |
| 9 | NOX, CO, PM10/2.5, VOCS, winds peed, temperature, humidity, radiation | Hourly ozone concentration in Shanghai |
R20.96 RMSE7.71 |
RNN |
| 18 | Temperature, dew point, relatively humidity, wind speed humidity, wind speed | Ozone Concentration of Hangzhou |
R20.85 RMSE27.64 |
RFR |
| 33 | Evaporation, temperature, relatively humidity, day of year, sunshine duration | Daily ambient ozone levels across China |
R20.69 RMSE26 |
RFR |
LR is sensitive to linear relationships in data, making it suitable for predicting simple linear patterns.NN and RFR exhibit better adaptability to complex nonlinear relationships.
When it comes to air ozone prediction, LR assumes a linear relationship between the ozone concentration and predictor variables. Therefore, if the ozone concentration exhibits a clear linear trend and is influenced by straightforward factors such as meteorological or environmental variables, LR can provide accurate predictions.
However, in reality, ozone concentrations are often affected by complex nonlinear relationships, such as the interaction of multiple environmental factors or the impact of nonlinear pollution sources. In such cases, NN and RFR models can handle the complexity of the relationships more effectively.
NN is based on the principles of the biological nervous system, and they excel at capturing nonlinear patterns in the data. By learning the nonlinear features of the training data, NN can model the complex relationship between ozone concentration and various meteorological and environmental factors, providing more accurate predictions.
RFR, on the other hand, is an ensemble learning method that combines multiple decision trees. It can handle nonlinear relationships by creating an ensemble of trees that collectively capture the complex interactions between predictor variables and the ozone concentration. This ensemble approach allows RFR to provide more robust and accurate predictions in the presence of complex and noisy nonlinear relationships.
Comparison of prediction models
LR is suitable for air ozone prediction when the relationship between predictors and ozone concentration is linear and straightforward. However, when the relationship becomes more complex and nonlinear, NN and RFR are better equipped to capture and model these complexities, offering more accurate and reliable predictions. The choice of the appropriate model ultimately depends on the specific characteristics of the data and the requirements of the ozone prediction task.
NN, with their ability to capture intricate nonlinear patterns, is particularly suitable for large datasets and complex problems. The architecture of neural networks, consisting of multiple layers of interconnected nodes (neurons), allows them to learn and extract complex features from the data. This enables NN to model the complex relationships between the ozone concentration and various meteorological and environmental factors, leading to higher prediction accuracy.
BPNN and RNN are two commonly used neural network models for handling different types of data and problems. They also have different performance when it comes to time series prediction.
BPNN is a widely used feedforward neural network model, primarily designed to address classification and regression problems. It can learn and capture nonlinear relationships and trends in time series data for accurate predictions. However, BPNN may have difficulties with long-term dependencies in time series data, as its training process relies only on the current input and previous feedback. When there are long time delays or complex dependencies between time series data, BPNN may struggle to capture these patterns accurately, leading to decreased accuracy.
RNN and BPNN have distinct characteristics in time series prediction tasks. RNN is well-suited for modeling sequential dependencies and can handle variable-length time series data. It excels in capturing long-term dependencies and complex relationships through its recurrent connections and memory-like components.On the other hand, BPNN lacks explicit memory of past information and is less suitable for modeling sequential dependencies. However, BPNN can still be used for time series prediction by converting temporal data into a fixed-size input format, such as using month or date variables. In terms of performance, RNN tends to achieve better accuracy, especially in tasks involving long-range dependencies, but it requires more training data and may suffer from overfitting. BPNN can perform reasonably well with less training data.
LR offers fast computation with shorter model training and prediction time. NN and RFR models require more computational resources and time due to their larger model complexity.
Methodology
Data collection and preprocessing
The data used in this study consists of air pollution and meteorological records from a city in Sichuan Province, China, with a permanent population of over 20 million, spanning the past 9 years from 2014 to 2022. The variables included in the dataset are O3 (24-h average), PM2.5 (24-h average), PM10 (24-h average), SO2 (24-h average), NO2 (24-h average), CO (24-h average), daily average temperature, daily average wind speed, daily sunshine duration, daily mean temperature and month.
The data collection process involved obtaining daily air pollution and meteorological data from reliable sources. These data were collected ensuring a comprehensive representation of different seasonal and temporal patterns.The air pollution and meteorological data were merged into a single dataset based on the common timestamp of each daily observation. This integration facilitated the modeling process by providing a consolidated view of all relevant variables.
The dataset was split into a training set and a testing set. Sample 1–2773 were used as training set, while the remaining samples (sample 2774–3138), representing the period from January 1, 2022 to December 31, 2022, were set aside as testing set. This partitioning allowed us to assess the performance of the soft sensor models on unseen data.
To ensure that all variables have a similar range and distribution, data scaling techniques such as normalization or standardization were applied. This step is important for models that are sensitive to the scale and variance of input features.
Finally, the preprocessed data was carefully verified to ensure its integrity and suitability for the soft sensor modeling. Any inconsistencies or errors were addressed before proceeding to model development.
By following these data collection and preprocessing steps, we prepared a high-quality dataset for the subsequent modeling analysis. This dataset incorporated both air pollution and meteorological variables, allowing us to develop accurate soft sensor models for air ozone prediction.
Feature selection and engineering
Feature selection techniques, including Pearson correlation coefficient analysis, were applied to identify the most relevant variables for ozone prediction. This step aimed to reduce dataset dimensionality, improve model interpretability and ensure that only the most influential features were incorporated in the modeling process, thus mitigating the risk of overfitting. By assessing the strength and direction of relationships between variables, the Pearson correlation coefficient analysis helped identify variables that significantly correlated with ozone levels. This allowed us to concentrate on the most informative predictors, leading to more accurate and interpretable soft sensor models while reducing the risk of overfitting.
Pearson correlation coefficient is a statistical measure used to determine the strength and direction of the linear relationship between two variables. Essentials of application of Pearson correlation coefficient in variables correlation ranking are: (1) Pearson correlation coefficient is commonly used in multiple regression analysis to select the most significant independent variables by calculating the correlation coefficients between each independent variable; (2) The correlation coefficient ranges from − 1 to 1, and the larger the absolute value, the stronger the correlation; (3) When the correlation coefficient value is close to 0, it indicates that the correlation between the two variables is very weak and they can be considered independent.
In order to prevent the occurrence of invalid variables, avoid overfitting and improve the training performance of the model, any variable with a normalized Pearson correlation coefficient value, that is regarded as the normalized score of variable importance, less than 0. 01 was removed. The resulting normalized score of variable importance ordering diagram shows the nine factors affecting ozone concentration (Fig. 4). It was found that temperature had the greatest influence on ozone concentration, followed by sunshine duration, PM2.5, month, CO, PM10, wind speed, SO2 and NO2.
Figure 4.

Ranking of variable importance.
Calculating and analyzing the Pearson correlation coefficient between variables is done to detect the presence of high correlation or multicollinearity among the independent variables (Fig. 5). Multicollinearity can have an impact on the interpretability and stability of the model, as well as affect the accurate assessment of the coefficients and statistical significance of the independent variables. With multicollinearity, the effects of the independent variables become difficult to independently explain, and it becomes challenging for the model to determine the unique contribution of each independent variable towards the dependent variable. Recognizing these issues and taking appropriate measures to address multicollinearity can improve the quality and reliability of the model.
Figure 5.

Pearson correlation between variables.
For example, the Pearson correlation coefficient between PM10 and PM2.5 is + 0.96, indicating a high degree of correlation. This can be well explained by the common meaning and measurement methods of these two variables.
Based on the ranking of variable importance scores (Fig. 4), it is evident that meteorology-related variables hold the top two positions. Therefore, it can be concluded that meteorology-related variables play a dominant role in the data analysis within the range of the nine variables under consideration. Similarly, the relationship diagrams between the aforementioned two and ozone are provided (Fig. 6).
Figure 6.

Relationship between meteorological conditions and ozone concentration.
Studies34–36 have highlighted the relationship between temperature and ozone concentration, providing valuable insights into the complex dynamics involved. The warming of the lower atmosphere can greatly influence the concentration of ozone due to its impact on photochemical reactions.
At higher temperatures, the molecular collisions and reactions involved in the production and destruction of ozone become more frequent and energetic. This enhanced molecular activity promotes the production of reactive species like NOx and VOCs. These species play a crucial role in the ozone generation process. The positive correlation between ozone and temperature can be explained by enhanced photochemical reaction: at high temperatures, the intensity of solar radiation increases, which facilitates photochemical reactions between NOx and VOCs in the atmosphere, resulting in the formation of more ozone.
Turning to the influence of sunlight duration on ozone concentration, it is widely recognized that prolonged exposure to sunlight provides more energy for photochemical reactions to occur. Sunlight, particularly in the ultraviolet wavelength range, initiates a series of complex photochemical reactions that ultimately lead to ozone formation.
The primary photochemical reaction involved in ozone generation is the dissociation of nitrogen dioxide (NO2) into individual oxygen atoms (O). These oxygen atoms then react with O2 molecules to form ozone (O3). Longer durations of sunlight exposure increase the availability of UV radiation required for the dissociation of nitrogen dioxide, leading to a higher ozone production rate.
In theory, there is a correlation between air ozone and NOx, as NOx is a precursor to the formation of ozone. However, in this sample set, Pearson correlation coefficient analysis found no correlation between ozone and NO2, which is inconsistent with theory or common perception. The reasons for this result may be: (1) time lag effect: the correlation between ozone and nitrogen dioxide may be affected by time lag effect. Due to the time difference between the formation and transformation processes of ozone and nitrogen dioxide in the atmosphere, there may be a lack of correlation between the measured data at a certain point in time. (2) Composition randomness: there is a certain degree of randomness in the ratio between NO and NO2 in NOX, which may affect the Pearson correlation coefficient. The Pearson correlation coefficient is an indicator that measures the degree of linear correlation between two variables. If one of the variables (such as the ratio of NO to NO2 in NOX) has significant randomness, this may lead to a low correlation coefficient or lack of statistical significance in the calculation results. Therefore, when conducting correlation analysis, it is necessary to consider the range of variation in the ratio of NO to NO2 in NOX and the stability of the data to obtain more accurate results. Unfortunately, there is no separate statistics of NOX concentration in the samples of this investigation, because NO2 is a required test item in the local area, while NOX is an optional test item.
In a regression model, the combination of input variables has a significant impact on the model's performance and predictive ability. Here are two key factors to consider:
-
Dimension and quantity.
The dimension refers to the number of input features, while the quantity represents the number of different types of input features. Having higher dimensions and quantities can provide more information and variations, which in turn enhance the model's expressive power and fitting ability. However, it is essential to exercise caution when selecting the appropriate dimension and quantity to avoid issues such as overfitting.
-
Feature selection.
Utilizing feature selection methods helps identify input variables with high predictive power for the target variable. By excluding irrelevant or redundant features, the model's complexity can be reduced, leading to improved generalizability. Pearson coefficient is a commonly used metric to assess the linear correlation between input variables and the target variable. Higher Pearson coefficients indicate stronger linear relationships, thus providing guidance for feature selection. Feature ranking is an effective technique that ranks features based on their correlation with the target variable. By calculating the Pearson coefficient, the strength of the linear relationship between variables can be determined and used to rank the features. Based on this ranking, variables with higher Pearson coefficients can be selected as input features to enhance the model's predictive ability. It's also possible to construct multiple models with different input variable combinations based on feature ranking (Table 2). By comparing the performance of these models, the optimal input variable combination can be determined for building the regression model.
If input variables have different scales or units, feature scaling becomes crucial. Standardization and normalization are common techniques used to ensure that all input variables have similar scales, avoiding the undesirable influence of different scales on the model during the training process.
Overall, selecting the appropriate combination of input variables requires a comprehensive consideration of the data's characteristics, problem complexity, and model requirements. By selecting and processing input variables thoughtfully, we can enhance the model's accuracy and generalization ability, while carefully avoiding overfitting. Consequently, when constructing a regression model, it's essential to pay close attention to the impact of input variable selection and feature processing.The variable set is determined based on the importance determined by the Pearson correlation coefficient. The variables are ranked by their importance, and the top 9–1 variables are selected for combination (Table 2).
Table 2.
Input combinations based on ranking of variable importance.
| Variable set | t | SD | PM2.5 | Month | CO | PM10 | WS | SO2 | NO2 |
|---|---|---|---|---|---|---|---|---|---|
| A | + | + | + | + | + | + | + | + | + |
| B | + | + | + | + | + | + | + | + | |
| C | + | + | + | + | + | + | + | ||
| D | + | + | + | + | + | + | |||
| E | + | + | + | + | + | ||||
| F | + | + | + | + | |||||
| G | + | + | + | ||||||
| H | + | + | |||||||
| I | + |
SD sunshine duration, WS wind speed.
Application
Models
Three types of inferential estimation models were examined, namely LR (linear regression), NN (neural networks) and RFR (random forest regression). Two LR models were applied, RML (MLR without nonlinear extension) and RMLNE (MLR with nonlinear extension).
Different NN models can have different numbers of neurons37. For example, a BPNN model can be designed with the number of neurons equal to 1 or 2 times the number of input variables(NNBP[X] and NNBP[2X]).
The RNN model can be designed with two variations38: one that utilizes the first 30 time steps (NNR[Y]) and another that utilizes the first 15 time steps (NNR[0.5Y]).
The RFR model can be designed with a type39 that has 100 trees or a type that has 200 trees (RFR100 and RFR200).The comparison of the eight regression models is shown in Table 3.
Table 3.
Comparison of models.
| Model type | Model name | Description | Differences with the other similar model |
|---|---|---|---|
| Linear regression | RML | Multiple Linear Regression model with multiple independent variables, assuming a linear relationship between the dependent variable and the independent variables | Multiple Linear Regression model with nonlinear terms has the advantage of allowing for a more complex relationship between the dependent variable and the independent variables, which can improve the fitting capability of the model, especially for nonlinear data |
| RMLNE | Multiple Linear Regression model with nonlinear terms, allowing for a more complex relationship between the dependent variable and the independent variables. Differs from RML in the inclusion of nonlinear terms | ||
| Neural network | NNBP[X] | An artificial neural network model trained using the backpropagation algorithm with 1 times the number of input variables in the hidden layer(s). Differs from NNBP[2X] in the number of neurons in the hidden layer(s) | The main difference between these two models lies in their complexity and potential learning capability. NNBP[2X] has a higher number of neurons, which increases the model's capacity to learn more complex relationships between the input and output variables. This can lead to better fitting results and more accurate predictions.A higher number of neurons also increases the risk of overfitting, as the model may become too complex and fit the noise in the training data |
| NNBP[2X] | An artificial neural network model similar to NNBP[X] but with twice as many neurons in the hidden layer(s) | ||
| Recurrent neural network | NNR[Y] | A neural network model that can process sequential data, using the first 30 time steps to make predictions. Differs from NNR[0.5Y] in the number of time steps used for prediction | The main difference between these two models lies in the amount of historical information they consider when making predictions. NNR[Y] takes into account a longer sequence of past data, which may provide more context and improve the model's ability to capture temporal patterns and trends. Using more time steps also increases the computational complexity of the model and may require more data to train effectively |
| NNR[0.5Y] | A neural network model similar to NNR[Y] but uses the first 15 time steps for prediction | ||
| Random forest regression | RFR100 | An ensemble learning model that combines multiple decision trees for regression prediction, using 100 decision trees. Differs from RFR200 in the number of decision trees used | The increased number of decision trees in RFR200 generally leads to a more complex model, which can capture more subtle patterns in the data and potentially result in more accurate predictions. However, this comes at the cost of increased computational complexity and a higher risk of overfitting, particularly if the dataset is small |
| RFR200 | An ensemble learning model similar to RFR100 but uses 200 decision trees for regression prediction |
In total, 72 soft sensors (i.e., a model applied to a variable set) were analysed. These soft sensors consisted of eight models with nine identified variable sets using 1–9 input variables (Table 2).
Assessment of soft sensor model
The effectiveness of the soft sensor model was assessed across five criterion. The standard value of ozone was set at 160 μg/m3.Ozone standard value can vary due to local regulations. The assessment criterion are listed in Table 4.
Table 4.
Criterion of assessment.
| Criterion | Description | Practical application |
|---|---|---|
| R2 | Referred to as the coefficient of determination, it is an indicator of the strength of the relationship between variables | Measures the strength of the relationship between predicted trend and actual trend |
| RMSE | Root Mean Square Error (RMSE) is another widely used statistical metric to evaluate the performance of a model. It measures the square root of the average of the squared differences between the predicted and actual values. Similar to MSE, a lower RMSE value indicates a higher level of accuracy in prediction | Measures the average accuracy of the predicted trend against the actual trend |
| MAE | Mean Absolute Error (MAE) is a commonly used statistical metric to assess the performance of a model. It calculates the average of the absolute differences between the predicted and actual values. MAE provides a measure of the average magnitude of the errors, disregarding their direction. Similar to MSE and RMSE, a lower MAE value indicates a higher level of accuracy in prediction | Measures the average accuracy of the predicted values compared to the actual values. Instead of focusing solely on the differences between predicted and actual values, MAE calculates the average magnitude of these differences. It provides a meaningful measure of the average prediction error, regardless of the direction of the errors |
| Variable utilization | Variable utilization refers to the number of input variables used by each soft sensor, ranging from 1 to 9 | Represents the amount of data needed, which indirectly reflects the amount of pre-foundation work |
| Accuracy | When the measured ozone concentration is above the local standard value, if the prediction is valid and significant, that means the predicted value is greater than the standard value,the accuracy meets the requirement.Accuracy(%) is equal to the number of successful predictions divided by the number of occurrences where the measured values exceeded the threshold | Indicates the accuracy at the threshold(standard value). The criterion of accuracy expresses the concern and attention to the predictive ability of ozone concentration exceeding the standard. As an example, when the measured value of air ozone concentration is 210 μg/m3, which exceeds the local ambient air quality standard (ozone, 160 μg/m3), if the predicted value is greater than 160 μg/m3, then it indicates that the prediction of the fact that the standard has been exceeded has been successful; otherwise, it indicates a prediction failure. The accuracy is calculated by dividing the number of successful predictions in the test set by the number of days in the test set with all the metrics exceeding the threshold |
Different criterion have different levels of importance. To compare these criterion, they need to be quantified and assigned weights. According to the consultation with environmental monitoring and air pollution control engineers, the following criterion weights have been obtained (Table 5).
Table 5.
Weight of criterion.
| Criterion | Ranking attributes | Functions | Weight |
|---|---|---|---|
| Accuracy | The higher the Accuracy value, the better the performance and the higher the ranking value | The higher the Accuracy value, indicating a better prediction performance in terms of correctly identifying instances where the ozone concentration exceeds the local standard value. This criterion emphasizes the importance of accurately predicting ozone concentration exceedances, providing a measure of the model's ability to capture such events | 10 |
| R2 | The higher the R2 value, the better the performance and the higher the ranking value | The higher the R2 value, indicating a stronger relationship between variables and a better fit of the model to the data. This practical application provides insight into the model's ability to capture variations in the data | 4 |
| RMSE | The lower the RMSE value, the better the performance and the higher the ranking value | This criterion provides a comprehensive evaluation of the model's performance, considering both the magnitude and direction of the errors | 3 |
| MAE | The lower the MAE value, the better the performance and the higher the ranking value | MAE provides a comprehensive measure of the average prediction error, considering both the magnitude and direction of the errors. This criterion effectively evaluates the model's ability to minimize the overall prediction error, offering insight into its predictive performance | 2 |
| Variable utilization | The lower the variable utilization value, the better the performance and the higher the ranking value | The variable utilization indirectly reflects the amount of pre-foundation work needed, such as data acquisition, feature engineering, and data cleaning. This attribute offers valuable information about the potential complexity and resources needed for the implementation of each soft sensor | 1 |
Modeling process
According to the principle of prediction model and evaluation methods,the modeling process is divided into four steps as follows: (1) collection of sample data; (2) determination and ranking of the importance of features; (3) construction of variables database; (4) prediction model applied in practice; (5) evaluation of soft sensors.
Based on the operational process data, soft sensor models were utilized to develop the ozone prediction model, which is illustrated in Fig. 7.
Figure 7.

The technical balance between the variables and prediction model.
Results and analysis
Results of LR
Two regression models were assessed, RML and RMLNE. Detailed results for each model are displayed in Table 6, respectively. An overview of these results confirms that RMLNE outperformed RML in terms of accuracy, as it consistently achieved higher R2 and lower error results. This improvement in accuracy leads to more reliable ozone concentration predictions.
Table 6.
Results of LR.
| Sensor | R2 | RMSE | MAE | Variable utilization | Accuracy (%) |
|---|---|---|---|---|---|
| RMLA | 0.7271 | 29.94 | 24.4891 | 9 | 59.820 |
| RMLB | 0.7262 | 29.99 | 24.1181 | 8 | 60.680 |
| RMLC | 0.7296 | 29.81 | 23.7566 | 7 | 60.680 |
| RMLD | 0.7297 | 29.8 | 23.7594 | 6 | 60.680 |
| RMLE | 0.7152 | 30.59 | 25 | 5 | 62.390 |
| RMLF | 0.7119 | 30.77 | 24.616 | 4 | 60.680 |
| RMLG | 0.7211 | 30.27 | 24.4848 | 3 | 55.550 |
| RMLH | 0.6851 | 32.17 | 26.3866 | 2 | 52.990 |
| RMLI | 0.6928 | 31.77 | 26.2531 | 1 | 49.570 |
| RMLNEA | 0.7642 | 27.83 | 22.7889 | 9 | 57.260 |
| RMLNEB | 0.7318 | 29.69 | 23.802 | 8 | 60.680 |
| RMLNEC | 0.7334 | 29.6 | 23.7532 | 7 | 61.530 |
| RMLNED | 0.7337 | 29.58 | 23.7448 | 6 | 58.970 |
| RMLNEE | 0.7254 | 30.04 | 24.3147 | 5 | 59.830 |
| RMLNEF | 0.7278 | 29.91 | 24.2875 | 4 | 60.680 |
| RMLNEG | 0.7247 | 30.07 | 24.0526 | 3 | 63.250 |
| RMLNEH | 0.7156 | 30.57 | 24.7728 | 2 | 63.250 |
| RMLNEI | 0.7228 | 30.18 | 24.5716 | 1 | 47.000 |
LR with nonlinear expansion is a machine learning method that enhances the flexibility and expressive power of a model by applying nonlinear transformations to input features. In traditional linear regression, it is assumed that there is a linear relationship between the features and the target variable. However, in real-world problems, many factors do not satisfy the linear assumption. LR with nonlinear expansion introduces nonlinear functions to map the original features, enabling the model to capture more complex relationships. This approach improves the predictive accuracy of the model and is suitable for modeling nonlinear relationships.
Sensor RMLD and RMLNEC perform best in their respective model categories, as shown in Tables 7 and 8, which means that having more variables in a variable set does not necessarily result in better sensor performance. Overfitting should be particularly considered, so the variable set should be carefully determined.
Table 7.
Ranking values of RML.
| Sensor | Ranking values in the following criterion | Weighted ranking values | ||||
|---|---|---|---|---|---|---|
| R2 | RMSE | MAE | Variable utilization | Accuracy | ||
| RMLA | 7 | 7 | 5 | 1 | 4 | 100 |
| RMLB | 6 | 6 | 7 | 2 | 5 | 108 |
| RMLC | 8 | 8 | 9 | 3 | 5 | 127 |
| RMLD | 9 | 9 | 8 | 4 | 5 | 133 |
| RMLE | 4 | 4 | 4 | 5 | 9 | 131 |
| RMLF | 3 | 3 | 3 | 6 | 5 | 83 |
| RMLG | 5 | 5 | 6 | 7 | 3 | 84 |
| RMLH | 1 | 1 | 1 | 8 | 2 | 37 |
| RMLI | 2 | 2 | 2 | 9 | 1 | 37 |
Table 8.
Ranking values of RMLNE.
| Sensor | Ranking values in the following criterion | Weighted ranking values | ||||
|---|---|---|---|---|---|---|
| R2 | RMSE | MAE | Variable utilization | Accuracy | ||
| RMLNEA | 9 | 9 | 9 | 1 | 2 | 102 |
| RMLNEB | 6 | 6 | 6 | 2 | 5 | 106 |
| RMLNEC | 7 | 7 | 7 | 3 | 7 | 136 |
| RMLNED | 8 | 8 | 8 | 4 | 3 | 106 |
| RMLNEE | 4 | 4 | 3 | 5 | 4 | 79 |
| RMLNEF | 5 | 5 | 4 | 6 | 5 | 99 |
| RMLNEG | 3 | 3 | 5 | 7 | 8 | 118 |
| RMLNEH | 1 | 1 | 1 | 8 | 8 | 97 |
| RMLNEI | 2 | 2 | 2 | 9 | 1 | 37 |
Results of NN
Four regression models were assessed, NNBP[X], NNBP[2X], NNR[Y] and NNR[0.5Y]. Detailed results for each model are displayed in Tables 9 and 10, respectively. An overview of these results confirms that NNR outperformed NNBP in terms of accuracy, as it consistently achieved higher R2 and accuracy. This improvement leads to more reliable ozone concentration predictions.
Table 9.
Results of NNBP.
| Sensor | R2 | RMSE | MAE | Variable utilization | Accuracy (%) |
|---|---|---|---|---|---|
| NNBP[X]A | 0.87274 | 25.7923 | 20.189 | 9 | 76.289 |
| NNBP[X]B | 0.8758 | 27.0951 | 20.8078 | 8 | 79.381 |
| NNBP[X]C | 0.8728 | 26.9391 | 20.88 | 7 | 83.505 |
| NNBP[X]D | 0.86533 | 24.7628 | 19.0255 | 6 | 79.381 |
| NNBP[X]E | 0.8722 | 24.1676 | 18.8387 | 5 | 81.443 |
| NNBP[X]F | 0.86969 | 25.774 | 19.9231 | 4 | 76.289 |
| NNBP[X]G | 0.81766 | 25.9039 | 20.5584 | 3 | 71.134 |
| NNBP[X]H | 0.76605 | 30.08 | 24.2408 | 2 | 70.103 |
| NNBP[X]I | 0.7392 | 31.4552 | 25.1164 | 1 | 63.918 |
| NNBP[2X]A | 0.8799 | 25.2692 | 19.8742 | 9 | 76.289 |
| NNBP[2X]B | 0.88129 | 26.3355 | 20.7613 | 8 | 78.351 |
| NNBP[2X]C | 0.84936 | 26.3093 | 20.8789 | 7 | 70.103 |
| NNBP[2X]D | 0.87687 | 28.0203 | 19.916 | 6 | 79.381 |
| NNBP[2X]E | 0.86211 | 25.6323 | 19.9623 | 5 | 84.536 |
| NNBP[2X]F | 0.85464 | 28.1521 | 21.6367 | 4 | 77.32 |
| NNBP[2X]G | 0.81043 | 25.4879 | 20.2439 | 3 | 70.103 |
| NNBP[2X]H | 0.77477 | 31.7843 | 25.8355 | 2 | 70.103 |
| NNBP[2X]I | 0.73017 | 34.3527 | 27.6884 | 1 | 59.794 |
Table 10.
Results of NNR.
| Sensor | R2 | RMSE | MAE | Variable utilization | Accuracy (%) |
|---|---|---|---|---|---|
| NNR[Y]A | 0.90 | 25.8317 | 20.0169 | 9 | 78.351 |
| NNR[Y]B | 0.9001 | 24.2706 | 18.709 | 8 | 78.351 |
| NNR[Y]C | 0.8902 | 24.9123 | 19.1583 | 7 | 81.443 |
| NNR[Y]D | 0.8962 | 25.7434 | 20.013 | 6 | 80.412 |
| NNR[Y]E | 0.8838 | 26.0779 | 19.6821 | 5 | 83.505 |
| NNR[Y]F | 0.8530 | 27.5419 | 21.2768 | 4 | 80.412 |
| NNR[Y]G | 0.8498 | 26.6071 | 21.2003 | 3 | 71.134 |
| NNR[Y]H | 0.7928 | 30.5566 | 24.5275 | 2 | 70.103 |
| NNR[Y]I | 0.7370 | 33.3163 | 26.7145 | 1 | 59.794 |
| NNR[0.5Y]A | 0.867 | 26.6056 | 20.8383 | 9 | 78.351 |
| NNR[0.5Y]B | 0.8888 | 25.1199 | 19.8288 | 8 | 80.412 |
| NNR[0.5Y]C | 0.8808 | 26.4318 | 20.2491 | 7 | 80.412 |
| NNR[0.5Y]D | 0.8566 | 25.3612 | 19.6895 | 6 | 78.351 |
| NNR[0.5Y]E | 0.8802 | 27.0095 | 21.2078 | 5 | 82.474 |
| NNR[0.5Y]F | 0.8677 | 26.2297 | 19.9844 | 4 | 79.381 |
| NNR[0.5Y]G | 0.8436 | 26.1772 | 20.7957 | 3 | 70.103 |
| NNR[0.5Y]H | 0.8268 | 30.5001 | 24.5668 | 2 | 68.041 |
| NNR[0.5Y]I | 0.7323 | 32.0173 | 25.6736 | 1 | 65.979 |
RNN is a type of neural network architecture that exhibits strong capabilities in handling sequential data. Unlike traditional BPNN, RNN introduces recurrent connections, allowing information to be propagated within the network.
The key characteristic of RNN is its memory capability, enabling it to process input sequences of arbitrary length while considering the context information. By incorporating recurrent connections, RNN takes the previous time step's output as the current time step's input, allowing the network to model each element in the sequence and utilize past information to influence future outputs. This memory capability makes RNN highly effective in tasks involving time series and more.
In an RNN model, input delays refer to the range of delays in which the network receives input signals. It defines how many previous time steps the network considers at a given time step.
The choice of delay range depends on the nature of the problem and the temporal dependencies in the data. Longer delay ranges can help the network capture longer-term dependencies but also increase model complexity and computational costs40. Shorter delay ranges may limit the network's ability to model longer-term dependencies.
In practice, selecting the appropriate input delays requires experimentation and tuning to find the optimal delay range for achieving the best performance and contextual modeling capability on a given task.
Upon observation of BPNN results, NNBP[2X] does not outperform NNBP[X] in terms of performance.Setting the number of neurons to be equal to the input variables is a common practice, especially for relatively simple tasks and datasets. Such a setting often provides sufficient model capacity to learn and represent the features of the input data.When the number of input variables is small or simple, setting the number of neurons to be equal to the input variables maintains a relatively concise model that can effectively handle task requirements. This setting also helps reduce computational and memory costs, making the model training and inference processes more efficient.
The number of neurons is not necessarily the more, the better. The appropriate number of neurons depends on the specific problem and the structure of the neural network.
Increasing the number of neurons can enhance the model's expressive power and learning capacity, enabling it to better fit complex data patterns. Especially for large-scale and high-dimensional problems, appropriately increasing the number of neurons may improve the performance of the model.
However, having too many neurons can also lead to some issues. Firstly, it increases the complexity and computational load of the model, slowing down the training and inference process. Additionally, if there are too many neurons, it may result in overfitting, where the model excessively adapts to the training data and performs poorly on unseen data.
Therefore, when designing a neural network, it is important to determine the appropriate number of neurons based on the characteristics of the specific task and dataset. This often involves experimentation and optimization to find the optimal balance and achieve good model performance.
Upon observation of RNN results, NNR[Y] outperformed NNR[0.5Y] in terms of performance.Although this advantage may not be significant, it is still meaningful as it suggests that longer memory leads to better predictive performance.While broader memory yields better results, it may not necessarily be the optimal choice due to its higher computational requirements and the need for increased processing power.
Sensor NNBP[X]E, NNBP[2X]E, NNR[Y]C and NNR[0.5Y]B perform best in their respective model categories as shown in Tables 11, 12, 13 and 14.
Table 11.
Ranking values of NNBP[X].
| Sensor | Ranking values in the following criterion | Weighted ranking values | ||||
|---|---|---|---|---|---|---|
| R2 | RMSE | MAE | Variable utilization | Accuracy | ||
| NNBP[X]A | 6 | 6 | 6 | 1 | 4 | 95 |
| NNBP[X]B | 8 | 3 | 4 | 2 | 6 | 111 |
| NNBP[X]C | 7 | 4 | 3 | 3 | 9 | 139 |
| NNBP[X]D | 4 | 9 | 9 | 4 | 6 | 125 |
| NNBP[X]E | 9 | 8 | 8 | 5 | 8 | 161 |
| NNBP[X]F | 5 | 7 | 7 | 6 | 4 | 101 |
| NNBP[X]G | 3 | 5 | 5 | 7 | 3 | 74 |
| NNBP[X]H | 2 | 2 | 2 | 8 | 2 | 46 |
| NNBP[X]I | 1 | 1 | 1 | 9 | 1 | 28 |
Table 12.
Ranking values of NNBP[2X].
| Sensor | Ranking values in the following criterion | Weighted ranking values | ||||
|---|---|---|---|---|---|---|
| R2 | RMSE | MAE | Variable utilization | Accuracy | ||
| NNBP[2X]A | 8 | 9 | 9 | 1 | 5 | 128 |
| NNBP[2X]B | 9 | 5 | 5 | 2 | 7 | 133 |
| NNBP[2X]C | 4 | 6 | 4 | 3 | 2 | 65 |
| NNBP[2X]D | 7 | 4 | 8 | 4 | 8 | 140 |
| NNBP[2X]E | 6 | 7 | 7 | 5 | 9 | 154 |
| NNBP[2X]F | 5 | 3 | 3 | 6 | 6 | 101 |
| NNBP[2X]G | 3 | 8 | 6 | 7 | 2 | 75 |
| NNBP[2X]H | 2 | 2 | 2 | 8 | 2 | 46 |
| NNBP[2X]I | 1 | 1 | 1 | 9 | 1 | 28 |
Table 13.
Ranking values of NNR[Y].
| Sensor | Ranking values in the following criterion | Weighted ranking values | ||||
|---|---|---|---|---|---|---|
| R2 | RMSE | MAE | Variable utilization | Accuracy | ||
| NNR[Y]A | 8 | 6 | 5 | 1 | 4 | 101 |
| NNR[Y]B | 9 | 9 | 9 | 2 | 4 | 123 |
| NNR[Y]C | 6 | 8 | 8 | 3 | 8 | 147 |
| NNR[Y]D | 7 | 7 | 6 | 4 | 6 | 125 |
| NNR[Y]E | 5 | 5 | 7 | 5 | 9 | 144 |
| NNR[Y]F | 4 | 3 | 3 | 6 | 6 | 97 |
| NNR[Y]G | 3 | 4 | 4 | 7 | 3 | 69 |
| NNR[Y]H | 2 | 2 | 2 | 8 | 2 | 46 |
| NNR[Y]I | 1 | 1 | 1 | 9 | 1 | 28 |
Table 14.
Ranking values of NNR[0.5Y].
| Sensor | Ranking values in the following criterion | Weighted ranking values | ||||
|---|---|---|---|---|---|---|
| R2 | RMSE | MAE | Variable utilization | Accuracy | ||
| NNR[0.5Y]A | 5 | 4 | 4 | 1 | 4 | 81 |
| NNR[0.5Y]B | 9 | 9 | 8 | 2 | 7 | 151 |
| NNR[0.5Y]C | 8 | 5 | 6 | 3 | 7 | 132 |
| NNR[0.5Y]D | 4 | 8 | 9 | 4 | 4 | 102 |
| NNR[0.5Y]E | 7 | 3 | 3 | 5 | 9 | 138 |
| NNR[0.5Y]F | 6 | 6 | 7 | 6 | 6 | 122 |
| NNR[0.5Y]G | 3 | 7 | 5 | 7 | 3 | 80 |
| NNR[0.5Y]H | 2 | 2 | 2 | 8 | 2 | 46 |
| NNR[0.5Y]I | 1 | 1 | 1 | 9 | 1 | 28 |
Results of RFR
Two RFR models were assessed, RFR100 and RFR200. Detailed results for each model are displayed in Table 15, respectively. Sensor RFR100D and RFR200F perform best in their respective model categories as shown in Tables 16 and 17. An overview of these results confirms that performance distinction between RFR200 and RFR100 in terms of criterion is not significant. Especially in terms of the most important criterion, accuracy, their results are consistent.
Table 15.
Results of RFR.
| Sensor | R2 | RMSE | MAE | Variable utilization | Accuracy (%) |
|---|---|---|---|---|---|
| RFR100A | 0.8215 | 24.9195 | 19.6193 | 9 | 73.196 |
| RFR100B | 0.8215 | 24.3742 | 19.1659 | 8 | 75.258 |
| RFR100C | 0.8176 | 24.5416 | 19.2376 | 7 | 76.289 |
| RFR100D | 0.8242 | 24.4918 | 19.2901 | 6 | 76.289 |
| RFR100E | 0.808 | 25.0466 | 19.7699 | 5 | 78.351 |
| RFR100F | 0.8023 | 25.2306 | 19.8128 | 4 | 81.443 |
| RFR100G | 0.7584 | 28.7701 | 23.2987 | 3 | 69.072 |
| RFR100H | 0.6768 | 32.6854 | 26.3009 | 2 | 67.010 |
| RFR100I | 0.7003 | 33.7101 | 27.3665 | 1 | 63.918 |
| RFR200A | 0.8254 | 24.889 | 19.5336 | 9 | 75.258 |
| RFR200B | 0.8273 | 22.9189 | 19.6088 | 8 | 74.227 |
| RFR200C | 0.823 | 24.3381 | 19.1967 | 7 | 78.351 |
| RFR200D | 0.821 | 24.4174 | 19.3058 | 6 | 78.351 |
| RFR200E | 0.8126 | 25.1275 | 19.7744 | 5 | 77.320 |
| RFR200F | 0.8508 | 25.3318 | 19.9433 | 4 | 79.381 |
| RFR200G | 0.7595 | 29.0843 | 23.5596 | 3 | 69.072 |
| RFR200H | 0.6784 | 32.9689 | 26.4953 | 2 | 64.948 |
| RFR200I | 0.6995 | 33.6597 | 27.3013 | 1 | 63.918 |
Table 16.
Ranking values of RFR100.
| Sensor | Ranking values in the following criterion | Weighted ranking values | ||||
|---|---|---|---|---|---|---|
| R2 | RMSE | MAE | Variable utilization | Accuracy | ||
| RFR100A | 7 | 6 | 6 | 1 | 4 | 99 |
| RFR100B | 8 | 9 | 9 | 2 | 5 | 129 |
| RFR100C | 6 | 7 | 7 | 3 | 6 | 122 |
| RFR100D | 9 | 8 | 8 | 4 | 6 | 140 |
| RFR100E | 5 | 5 | 5 | 5 | 8 | 130 |
| RFR100F | 4 | 4 | 4 | 6 | 9 | 132 |
| RFR100G | 3 | 3 | 3 | 7 | 3 | 64 |
| RFR100H | 1 | 2 | 2 | 8 | 2 | 42 |
| RFR100I | 2 | 1 | 1 | 9 | 1 | 32 |
Table 17.
Ranking values of RFR200.
| Sensor | Ranking values in the following criterion | Weighted ranking values | ||||
|---|---|---|---|---|---|---|
| R2 | RMSE | MAE | Variable utilization | Accuracy | ||
| RFR200A | 7 | 6 | 7 | 1 | 5 | 111 |
| RFR200B | 8 | 9 | 6 | 2 | 4 | 113 |
| RFR200C | 6 | 8 | 9 | 3 | 7 | 139 |
| RFR200D | 5 | 7 | 8 | 4 | 7 | 131 |
| RFR200E | 4 | 5 | 5 | 5 | 6 | 106 |
| RFR200F | 9 | 4 | 4 | 6 | 9 | 152 |
| RFR200G | 3 | 3 | 3 | 7 | 3 | 64 |
| RFR200H | 1 | 2 | 2 | 8 | 2 | 42 |
| RFR200I | 2 | 1 | 1 | 9 | 1 | 32 |
In random forests, each decision tree is generated independently by using bootstrap sampling and random feature selection to increase the diversity among the trees23. This is done to achieve better generalization ability and reduce variance.
However, if the dataset exhibits strong feature correlations or similar settings such as parameters and feature subsets are used during tree construction, the correlation among the decision trees in the random forest may increase. When there is high correlation among the decision trees, increasing the number of trees may not lead to significant improvement in performance.
This is because the strength of a random forest lies in having multiple independent decision trees that can form a more robust model. They reduce variance and mitigate overfitting risks by aggregating the individual predictions. But when the decision trees are highly correlated, they may make similar predictions and fail to provide additional diversity and information.
Therefore, when there is high correlation among the decision trees, increasing the number of trees may not bring noticeable improvements because of limited prediction variability among them. In such cases, alternative measures such as adjusting other hyperparameters, using feature selection methods, or trying different models may be necessary to enhance the model's performance.
Comparison of different variable sets
Different sets of variables lead to distinct prediction performances. A comparative evaluation was conducted on the performances of variable sets A to I, comprising nine different sets of variables, across various models. The results are obtained in Fig. 8 and Tables 18 and 19.
Figure 8.
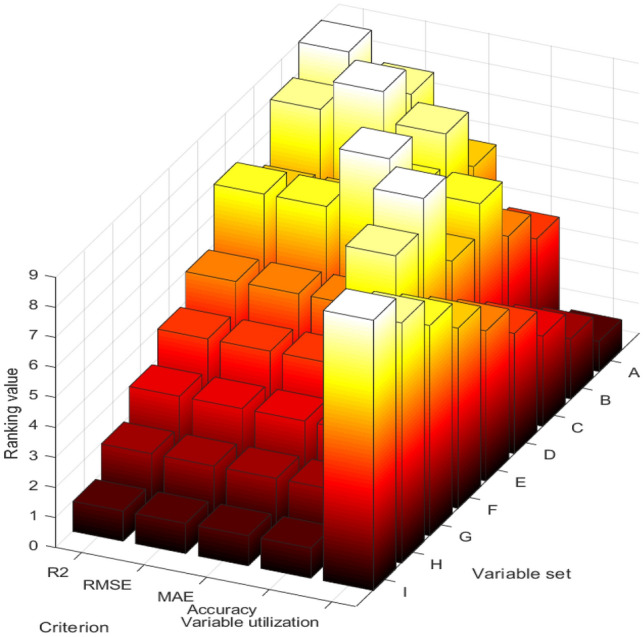
Ranking values of variable set A–I.
Table 18.
Ranking values of variable set A-I.
| Variable set | Ranking values in the following criterion(average value) | Weighted ranking values | ||||
|---|---|---|---|---|---|---|
| R2 | RMSE | MAE | Variable utilization | Accuracy | ||
| A | 9 | 8 | 6 | 1 | 4 | 113 |
| B | 8 | 9 | 8 | 2 | 5 | 127 |
| C | 6 | 6 | 7 | 3 | 7 | 129 |
| D | 7 | 7 | 9 | 4 | 6 | 131 |
| E | 5 | 5 | 5 | 5 | 9 | 140 |
| F | 4 | 4 | 4 | 6 | 8 | 122 |
| G | 3 | 3 | 3 | 7 | 3 | 64 |
| H | 2 | 2 | 2 | 8 | 2 | 46 |
| I | 1 | 1 | 1 | 9 | 1 | 28 |
Table 19.
Results of variable set A–I (average value).
| Variable set | R2 | RMSE | MAE | Variable utilization | Accuracy (%) |
|---|---|---|---|---|---|
| A | 0.8322 | 26.38 | 20.92 | 9 | 71.85 |
| B | 0.8316 | 26.22 | 20.85 | 8 | 73.42 |
| C | 0.8246 | 26.61 | 20.89 | 7 | 74.04 |
| D | 0.8255 | 26.52 | 20.59 | 6 | 73.98 |
| E | 0.8199 | 26.71 | 21.01 | 5 | 76.23 |
| F | 0.8172 | 27.37 | 21.44 | 4 | 74.45 |
| G | 0.7856 | 27.80 | 22.27 | 3 | 67.43 |
| H | 0.7395 | 31.41 | 25.39 | 2 | 65.82 |
| I | 0.7193 | 32.56 | 26.34 | 1 | 59.24 |
The variable sets A to I contain 9–1 feature(s), with set A having nine input features and set I having only 1. These features were selected based on their Pearson correlation coefficients, for example, set B includes the top eight input features ranked by their correlation coefficients. In theory, having more input features in a variable set should lead to better prediction performance.However, indiscriminately increasing the number of input feature types can lead to overfitting and a decline in prediction performance. One possible reason for this is the presence of multicollinearity among the input features, where they exhibit strong linear relationships with each other.
After considering the weights, variable set E demonstrates exceptional performance across various software sensor models. Moreover, it attains the highest average prediction accuracy. Accurate prediction of ozone concentrations is vital for effective environmental monitoring. However, not all levels of ozone concentration are equally important. In areas with low concentrations considered safe, the emphasis on ozone decreases. Conversely, when ozone levels exceed local environmental standards, there is a heightened focus on ozone, demanding accurate predictions. This research distinguishes itself by prioritizing prediction accuracy during exceedance conditions, introducing innovative evaluation methods, and recognizing accuracy as a critical performance metric for virtual ozone sensors. The study aims to enhance our understanding of ozone exceedance and improve prediction capabilities for better environmental management.
We examine the distinction between variable sets E and A, B, C, D. While variable sets A, B, C, D incorporate an additional input feature, namely PM10, compared to variable set E, their overall performance falls short, particularly in terms of prediction accuracy. We postulate that this disparity can be attributed to the pronounced correlation between PM10 and PM2.5, indicating a significant presence of multicollinearity among the variables.
Comparison of different models
Different sensor models lead to distinct prediction performances. A comparative evaluation was conducted on the performances of models, comprising eight different models, across various variable sets. The results obtained are as Fig. 9 and Tables 20 and 21.
Figure 9.

Ranking values of models.
Table 20.
Ranking values of models.
| Models | Ranking values in the following criterion(average value) | Weighted ranking values | ||||
|---|---|---|---|---|---|---|
| R2 | RMSE | MAE | Variable utilization | Accuracy | ||
| RML | 1 | 1 | 1 | – | 1 | 19 |
| RMLNE | 2 | 2 | 2 | – | 2 | 38 |
| NNBP[X] | 6 | 8 | 8 | – | 6 | 124 |
| NNBP[2X] | 5 | 3 | 3 | – | 5 | 85 |
| NNR[Y] | 8 | 5 | 7 | – | 8 | 141 |
| NNR[0.5Y] | 7 | 4 | 6 | – | 7 | 122 |
| RFR100 | 3 | 6 | 5 | – | 3 | 70 |
| RFR200 | 4 | 7 | 4 | – | 4 | 85 |
Table 21.
Results of models (average value).
| Models | R2 | RMSE | MAE | Variable utilization | Accuracy (%) |
|---|---|---|---|---|---|
| RML | 0.7154 | 30.57 | 24.71 | 5 | 58.12 |
| RMLNE | 0.7310 | 29.72 | 24.01 | 5 | 59.16 |
| NNBP[X] | 0.8391 | 26.89 | 21.06 | 5 | 75.72 |
| NNBP[2X] | 0.8355 | 27.93 | 21.87 | 5 | 74.00 |
| NNR[Y] | 0.8559 | 27.21 | 21.26 | 5 | 75.95 |
| NNR[0.5Y] | 0.8493 | 27.27 | 21.43 | 5 | 75.94 |
| RFR100 | 0.7812 | 27.09 | 21.54 | 5 | 73.43 |
| RFR200 | 0.7886 | 26.98 | 21.64 | 5 | 73.43 |
Overall, NN model outperform RFR and LR models in several aspects. NN model has gained popularity due to their ability to learn complex patterns and relationships in data, making them highly effective for a wide range of tasks.
One key advantage of NN is their ability to capture nonlinear relationships between input features and target variables. Unlike LR models, which assumes a linear relationship, NN can model intricate nonlinear interactions, allowing them to capture more complex patterns in the data. This flexibility makes NN well-suited for tasks where the underlying relationships are nonlinear or involve interactions between multiple variables.
Furthermore, NN is highly flexible in terms of model architecture. They can be designed with multiple layers and a large number of neurons, allowing them to capture intricate relationships and handle high-dimensional data effectively. This adaptability enables NN to handle a wide range of data types, including text, images, and sequential data, making them suitable for various applications such as time series analysis.
However, it's important to note that NN also has certain limitations. It often requires a large amount of labeled training data to achieve optimal performance and can be computationally expensive to train and deploy. Additionally, NN is prone to overfitting if not properly regularized and may be challenging to interpret compared to simpler models like linear regression.
In summary, NN models offer significant advantages over RFR and LR models. Its ability to capture nonlinear relationships, automatically learn features, and adapt to diverse data types make them a powerful tool for solving complex machine learning problems. However, the choice of model should be based on the specific characteristics of the dataset, computational resources, interpretability requirements, and the trade-off between model complexity and performance.
In the realm of NN models, RNN surpasses BPNN neural network models. This is primarily due to the distinct network architectures they employ. Specifically, RNN exhibit a remarkable advantage in handling time series data, which is evident in this particular scenario.
RNN excel at capturing temporal dependencies and patterns by incorporating memory units and recurrent connections. These architectural elements allow the model to retain and leverage information from past observations, thereby enhancing its ability to predict future outcomes. On the other hand, BPNN may encounter challenges such as information loss and gradient vanishing when confronted with time series data, as they independently process inputs at each time step.
Moreover, RNN possess the capability to handle variable-length sequence data by iteratively updating hidden states. This flexibility proves particularly advantageous when dealing with time series data of varying lengths, as RNN can adapt to the unique characteristics and patterns exhibited by different sequences.
Overall, by judiciously selecting NN models, particularly RNN, one can attain more accurate and reliable predictions. This approach offers an effective means of improving prediction performance and enhancing decision-making accuracy in similar cases.
Comparison of all sensors
Here is the ranking of the 72 sensors based on their comprehensive predictive performance, taking into account the weights and comparisons across various criterion (Table 22).
Table 22.
Ranking values of all sensors.
| Variable set | Ranking values in the following criterion | Weighted ranking values | ||||
|---|---|---|---|---|---|---|
| R2 | RMSE | MAE | Variable utilization | Accuracy | ||
| NNR[Y]C | 69 | 62 | 69 | 7 | 66 | 1267 |
| NNBP[X]E | 58 | 71 | 71 | 5 | 66 | 1252 |
| NNR[Y]E | 67 | 46 | 60 | 5 | 70 | 1231 |
| NNBP[2X]E | 53 | 52 | 50 | 5 | 72 | 1193 |
| NNR[0.5Y]B | 68 | 59 | 55 | 8 | 62 | 1187 |
| NNR[Y]D | 70 | 51 | 48 | 6 | 62 | 1155 |
| NNR[Y]B | 72 | 70 | 72 | 8 | 49 | 1140 |
| NNBP[X]C | 60 | 38 | 37 | 7 | 70 | 1135 |
| NNR[0.5Y]E | 64 | 37 | 35 | 5 | 69 | 1132 |
| NNBP[X]D | 54 | 64 | 70 | 6 | 57 | 1124 |
| NNR[0.5Y]C | 65 | 41 | 44 | 7 | 62 | 1098 |
| RFR100F | 32 | 57 | 56 | 4 | 66 | 1075 |
| RFR200F | 49 | 55 | 51 | 4 | 57 | 1037 |
| NNBP[2X]D | 62 | 33 | 53 | 6 | 57 | 1029 |
| NNR[0.5Y]F | 56 | 44 | 49 | 4 | 57 | 1028 |
| NNR[Y]A | 71 | 48 | 47 | 9 | 49 | 1021 |
| NNBP[X]B | 61 | 36 | 40 | 8 | 57 | 1010 |
| RFR200C | 41 | 69 | 67 | 7 | 49 | 1002 |
| NNR[Y]F | 50 | 35 | 34 | 4 | 62 | 997 |
| NNR[0.5Y]D | 52 | 54 | 59 | 6 | 49 | 984 |
| RFR200D | 38 | 67 | 64 | 6 | 49 | 977 |
| NNBP[2X]B | 66 | 42 | 42 | 8 | 49 | 972 |
| NNBP[2X]A | 63 | 56 | 54 | 9 | 42 | 957 |
| RFR100E | 33 | 60 | 58 | 5 | 49 | 923 |
| RFR100D | 42 | 66 | 65 | 6 | 42 | 922 |
| RFR200B | 45 | 72 | 62 | 8 | 39 | 918 |
| NNR[0.5Y]A | 55 | 40 | 39 | 9 | 49 | 917 |
| NNBP[X]F | 57 | 50 | 52 | 4 | 42 | 906 |
| NNBP[X]A | 59 | 49 | 46 | 9 | 42 | 904 |
| RFR100B | 39 | 68 | 68 | 8 | 40 | 904 |
| RFR200E | 35 | 58 | 57 | 5 | 47 | 903 |
| RFR100C | 36 | 65 | 66 | 7 | 42 | 898 |
| RFR200A | 43 | 63 | 63 | 9 | 40 | 896 |
| RFR100A | 40 | 61 | 61 | 9 | 38 | 854 |
| NNBP[2X]F | 51 | 32 | 33 | 4 | 47 | 840 |
| NNR[Y]G | 48 | 39 | 36 | 3 | 36 | 744 |
| NNBP[X]G | 37 | 47 | 43 | 3 | 36 | 738 |
| NNR[0.5Y]G | 46 | 45 | 41 | 3 | 30 | 704 |
| NNBP[2X]C | 47 | 43 | 38 | 7 | 30 | 700 |
| NNBP[2X]G | 34 | 53 | 45 | 3 | 30 | 688 |
| RFR100G | 26 | 31 | 31 | 3 | 28 | 542 |
| RFR200G | 27 | 30 | 30 | 3 | 28 | 541 |
| NNR[0.5Y]H | 44 | 16 | 16 | 2 | 27 | 528 |
| NNBP[X]H | 29 | 19 | 22 | 2 | 30 | 519 |
| NNR[Y]H | 31 | 15 | 17 | 2 | 30 | 505 |
| NNBP[2X]H | 30 | 9 | 9 | 2 | 30 | 467 |
| RMLNEC | 22 | 28 | 28 | 7 | 17 | 405 |
| NNR[0.5Y]I | 21 | 8 | 10 | 1 | 25 | 379 |
| NNBP[X]I | 25 | 11 | 11 | 1 | 21 | 366 |
| RMLNEG | 12 | 20 | 24 | 3 | 19 | 349 |
| RMLNEA | 28 | 34 | 32 | 9 | 5 | 337 |
| RMLNEB | 20 | 27 | 25 | 8 | 11 | 329 |
| RMLD | 18 | 26 | 26 | 6 | 11 | 318 |
| RMLC | 17 | 25 | 27 | 7 | 11 | 314 |
| RMLNED | 23 | 29 | 29 | 6 | 6 | 303 |
| RFR100H | 1 | 6 | 7 | 2 | 26 | 298 |
| RMLNEH | 9 | 14 | 13 | 2 | 19 | 296 |
| RMLNEF | 16 | 24 | 21 | 4 | 11 | 292 |
| RMLB | 14 | 22 | 23 | 8 | 11 | 286 |
| RMLE | 8 | 13 | 12 | 5 | 18 | 280 |
| RFR200H | 2 | 5 | 5 | 2 | 24 | 275 |
| RMLA | 15 | 23 | 18 | 9 | 9 | 264 |
| RMLNEE | 13 | 21 | 20 | 5 | 10 | 260 |
| RFR200I | 5 | 3 | 3 | 1 | 21 | 246 |
| RFR100I | 6 | 2 | 2 | 1 | 21 | 245 |
| RMLF | 7 | 12 | 14 | 4 | 11 | 206 |
| NNR[Y]I | 24 | 4 | 4 | 1 | 7 | 187 |
| RMLG | 10 | 17 | 19 | 3 | 4 | 172 |
| NNBP[2X]I | 19 | 1 | 1 | 1 | 7 | 152 |
| RMLNEI | 11 | 18 | 15 | 1 | 1 | 139 |
| RMLI | 4 | 10 | 8 | 1 | 2 | 83 |
| RMLH | 3 | 7 | 6 | 2 | 3 | 77 |
Among the 72 sensors evaluated, NNR[Y]C exhibits exceptional performance, boasting an impressive R2 of 0.8902, a low RMSE of 24.91, and an equally impressive MAE of 19.16. Notably, this sensor achieves an outstanding prediction accuracy of 81.44%, further enhancing its credibility and reliability. These remarkable results position NNR[Y]C as a top-performing sensor, making it a compelling choice for various technological applications.Here are the prediction result of sensor NNR[Y]C on the test set, demonstrating its effectiveness in accurately forecasting outcome(Fig. 10).
Figure 10.

Prediction result of sensor NNR[Y]C.
Conclusion
Summary of the study
In the proposed methodology, we conducted a comprehensive analysis of soft sensor modeling techniques for air ozone prediction. We compared the performance of three different modeling techniques: LR (linear regression), NN (neural networks), and RFR (random forest regression). Additionally, we evaluated the impact of different variable sets on prediction performance.
Discussion of the most effective modeling technique
Based on our findings, we conclude that neural network models, particularly the RNN (recurrent neural network) variant, outperformed the other modeling techniques in terms of prediction accuracy. RNN demonstrated superior capabilities in capturing temporal dependencies and patterns in time series data, making them highly effective for air ozone prediction. The flexibility of RNN in handling variable-length sequences further enhances their performance in modeling dynamic environmental processes.
Future directions for research in soft sensor modeling for air ozone prediction
While the proposed methodology provides valuable insights into soft sensor modeling for air ozone prediction, there are several areas that warrant further investigation.
Enhanced model interpretability: NN, although highly effective, is often considered black-box models, making it challenging to interpret their predictions. Future research should focus on developing techniques to improve the interpretability of NN models, enabling a better understanding of the underlying relationships between input variables and ozone concentrations.
Integration of domain knowledge: Incorporating domain knowledge and expert insights into the modeling process can enhance the accuracy and reliability of soft sensor models. Future research should explore methods for effectively integrating domain knowledge into the modeling framework, such as utilizing physical laws and environmental factors that influence ozone concentrations.
Ensemble modeling approaches: Ensemble modeling techniques, such as combining multiple models or incorporating expert knowledge, have shown promise in improving prediction accuracy. Future research should investigate the potential benefits of ensemble modeling for air ozone prediction, exploring ways to leverage the strengths of different modeling techniques and variable sets.
Real-time monitoring and feedback: Developing soft sensor models that can provide real-time monitoring and feedback on ozone concentrations is essential for effective environmental management. Future research should focus on developing online learning algorithms that can continuously update the soft sensor models and adapt to changing environmental conditions in real-time.
Generalizability and transferability: It is important to assess the generalizability and transferability of soft sensor models across different geographical locations and time periods. Future research should explore methods for evaluating the robustness and transferability of soft sensor models, considering variations in environmental conditions, sensor configurations, and data availability.
In conclusion, the proposed methodology highlights the superiority of neural network models, particularly recurrent neural networks, for soft sensor modeling in air ozone prediction. The findings provide valuable insights for researchers and practitioners in the field of environmental monitoring and management. Future research should focus on enhancing model interpretability, integrating domain knowledge, exploring ensemble modeling approaches, enabling real-time monitoring and assessing model generalizability as well as transferability. These advancements will contribute to the development of more accurate and reliable soft sensor models for air ozone prediction, ultimately supporting effective environmental management strategies.
Author contributions
Z.Z., C.Q. and Y.Z. wrote the main manuscript text. All authors reviewed the manuscript.
Data availability
The datasets used and/or analysed during the current study available from the corresponding author on reasonable request.
Competing interests
The authors declare no competing interests.
Footnotes
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
References
- 1.Hogue C. US EPA science advisers split on whether to tighten ozone pollution limit. Chem. Eng. News. 2019;97(48):17. [Google Scholar]
- 2.Feng Z, Kobayashi K, Li P, Xu Y, Tang H, Guo A, Paoletti E, Calatayud V. Impacts of current ozone pollution on wheat yield in China as estimated with observed ozone, meteorology and day of flowering. Atmos. Environ. 2019;217:116945. doi: 10.1016/j.atmosenv.2019.116945. [DOI] [Google Scholar]
- 3.Pinelo, L., Kugel, R., & Ault, B. Charge transfer complexes and photochemistry of ozone with n-butylferrocene and ferrocene: A UV–Vis matrix isolation study. Abstracts Papers Am. Chem. Soc.249, 10272–10272. 10.1021/acs.jpca.5b07292 (2015). [DOI] [PubMed]
- 4.Pochanart P. Residence time analysis of photochemical buildup of ozone in central eastern China from surface observation at Mt. Tai, Mt. Hua, and Mt. Huang in 2004. Environ. Sci. Pollut. Res. Int. 2015;22(18):14087–14094. doi: 10.1007/s11356-015-4642-0. [DOI] [PubMed] [Google Scholar]
- 5.Thompson CR, Shepson PB, Liao J, Huey LG, Apel EC, Cantrell CA, Flocke F, Orlando J, Fried A, Hall SR, Hornbrook RS, Knapp DJ, Mauldin RL, III, Montzka DD, Sive BC, Ullmann K, Weibring P, Weinheimer A. Interactions of bromine, chlorine, and iodine photochemistry during ozone depletions in Barrow, Alaska. Atmos. Chem. Phys. 2015;15(16):9651–9679. doi: 10.5194/acp-15-9651-2015. [DOI] [Google Scholar]
- 6.Chandra DG, Vinoth B, Reddy US, Uma G, Umapathy M. Recurrent neural network based soft sensor for flow estimation in liquid rocket engine injector calibration. Flow Meas. Instrum. 2022;83:102105. doi: 10.1016/j.flowmeasinst.2021.102105. [DOI] [Google Scholar]
- 7.Miao, Z., Le, Z., Jing, J., & Xiaoli, W. Soft sensor development based on quality-relevant slow feature analysis and Bayesian regression with application to propylene polymerization. J. Sensors.2021, 1–10 (2021).
- 8.Natalia K, Nikolay K, Yuriy Z, Georgii B. A soft sensor for measuring the wear of an induction motor bearing by the Park’s vector components of current and voltage. Sensors. 2021;21(23):7900. doi: 10.3390/s21237900. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 9.Zhang Y, Li F, Ni C, Gao S, Zhang S, Xue J, Ning Z, Wei C, Fang F, Nie Y, Jiao Z. Prediction and cause investigation of ozone based on a double-stage attention mechanism recurrent neural network. Front. Environ. Sci. Eng. 2023;17(2):21. doi: 10.1007/s11783-023-1621-4. [DOI] [Google Scholar]
- 10.Cheng P, Pour-Biazar A, White AT, McNider RT. Improvement of summertime surface ozone prediction by assimilating Geostationary Operational Environmental Satellite cloud observations. Atmos. Environ. 2022;268:118751. doi: 10.1016/j.atmosenv.2021.118751. [DOI] [Google Scholar]
- 11.Pendlebury D, Gravel S, Moran MD, Lupu A. Impact of chemical lateral boundary conditions in a regional air quality forecast model on surface ozone predictions during stratospheric intrusions. Atmos. Environ. 2018;174:148–170. doi: 10.1016/j.atmosenv.2017.10.052. [DOI] [Google Scholar]
- 12.James G, Witten D, Hastie T, Tibshirani R. An Introduction to Statistical Learning. Springer; 2013. [Google Scholar]
- 13.Zhao W, Fan S, Guo H, Gao Bo, Sun J, Chen L. Assessing the impact of local meteorological variables on surface ozone in Hong Kong during 2000–2015 using quantile and multiple line regression models. Atmos. Environ. 2016;144:182–193. doi: 10.1016/j.atmosenv.2016.08.077. [DOI] [Google Scholar]
- 14.Jiang Y, Qiao R, Zhu Y, Wang G. Data fusion of atmospheric ozone remote sensing Lidar according to deep learning. J. Supercomput. 2021;77(7):1–16. doi: 10.1007/s11227-020-03537-y. [DOI] [Google Scholar]
- 15.Feng R, Zheng H-J, Zhang A-R, Huang C, Gao H, Ma Y-C. Unveiling tropospheric ozone by the traditional atmospheric model and machine learning, and their comparison: A case study in Hangzhou, China. Environ. Pollut. 2019;252:366–378. doi: 10.1016/j.envpol.2019.05.101. [DOI] [PubMed] [Google Scholar]
- 16.Wang D, Wang H-W, Lu K-F, Peng Z-R, Zhao J. Regional prediction of ozone and fine particulate matter using diffusion convolutional recurrent neural network. Int. J. Environ. Res. Public Health. 2022;19:3988. doi: 10.3390/ijerph19073988. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 17.Li T, Lu Y, Deng X, Zhan Y. Spatiotemporal variations in meteorological influences on ambient ozone in China: A machine learning approach. Atmos. Pollut. Res. 2023;14:101720. doi: 10.1016/j.apr.2023.101720. [DOI] [Google Scholar]
- 18.Zhan Y, Luo Y, Deng X, Grieneisen ML, Zhang M, Di B. Spatiotemporal prediction of daily ambient ozone levels across China using random forest for human exposure assessment. Environ. Pollut. 2018;233:464–473. doi: 10.1016/j.envpol.2017.10.029. [DOI] [PubMed] [Google Scholar]
- 19.Xiaomin H, Jing Z, Wenhao X, Lihua Z, Yunfei C, Tian H. Estimation of the near-surface ozone concentration with full spatiotemporal coverage across the Beijing–Tianjin–Hebei region based on extreme gradient boosting combined with a WRF-Chem Model. Atmosphere. 2022;13(4):632–632. doi: 10.3390/atmos13040632. [DOI] [Google Scholar]
- 20.Chen H, Zhang L, Li X, Wang Y. Modelling and investigating the impacts of climatic variables on ozone concentration in Malaysia using correlation analysis with random forest, decision tree regression, linear regression, and support vector regression. Chemosphere. 2022;299:134250–134250. doi: 10.1016/j.chemosphere.2022.134250. [DOI] [PubMed] [Google Scholar]
- 21.Stafoggia, M., Johansson, C., Glantz, P., Renzi, M., Shtein, A., de Hoogh, K., Kloog, I., Davoli, M., Michelozzi, P., & Bellander, T. A random forest approach to estimate daily particulate matter, nitrogen dioxide, and ozone at fine spatial resolution in Sweden. Atmosphere.11(3), 239 (2020).
- 22.Fox S, James McDermott, Edelle D, Ronan C, Eoghan C. Application of neural networks and regression modelling to enable environmental regulatory compliance and energy optimisation in a sequencing batch reactor. Sustainability. 2022;14:4098. doi: 10.3390/su14074098. [DOI] [Google Scholar]
- 23.Cheng Q, Chunhong Z, Qianglin L. Development and application of random forest regression soft sensor model for treating domestic wastewater in a sequencing batch reactor. Sci. Rep. 2023;13:9149. doi: 10.1038/s41598-023-36333-8. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 24.Senthivel S, Chidambaranathan M. Machine learning approaches used for air quality forecast: A review. RIA. 2022;36(1):73–78. doi: 10.18280/ria.360108. [DOI] [Google Scholar]
- 25.Van NH, Van Thanh P, Tran DN, Tran DT. A new model of air quality prediction using lightweight machine learning. Int. J. Environ. Sci. Technol. 2022;20(3):2983–2994. doi: 10.1007/s13762-022-04185-w. [DOI] [Google Scholar]
- 26.Wang Z-F, Cheng W-C. Predicting jet-grout column diameter to mitigate the environmental impact using an artificial intelligence algorithm. Underground Space. 2020;6(3):267–280. doi: 10.1016/j.undsp.2020.02.004. [DOI] [Google Scholar]
- 27.Tang S, Li T, Guo Y, Zhu R, Qu H. Correction of various environmental influences on Doppler wind Lidar based on multiple linear regression model. Renew. Energy. 2022;184:933–947. doi: 10.1016/j.renene.2021.12.018. [DOI] [Google Scholar]
- 28.Xing-Zhi SUN, Zhong ZHONG, Jing JIANG. Linear regression analysis of the influence of Western North Pacific tropical cyclones on their large-scale environment. Chin. J. Geophys. 2017;60(2):131–140. doi: 10.1002/cjg2.30033. [DOI] [Google Scholar]
- 29.Mubin ZN, Ezzah SR, Hafiz ZM, Zia USA, Mohamad D. Prediction of future ozone concentration for next three days using linear regression and nonlinear regression models. IOP Conf. Series Mater. Sci. Eng. 2019;551(1):012006. doi: 10.1088/1757-899X/551/1/012006. [DOI] [Google Scholar]
- 30.Sousa SIV, Martins FG, Alvim-Ferraz MCM, Pereira MC. Multiple linear regression and artificial neural networks based on principal components to predict ozone concentrations. Environ. Modell. Softw. 2005;22(1):97–103. doi: 10.1016/j.envsoft.2005.12.002. [DOI] [Google Scholar]
- 31.Shen J, Chen J, Zhang X, Zou S, Gao Z. Outdoor and indoor ozone concentration estimation based on artificial neural network and single zone mass balance model. Procedia Eng. 2017;205:1835–1842. doi: 10.1016/j.proeng.2017.10.253. [DOI] [Google Scholar]
- 32.Gao M, Yin L, Ning J. Artificial neural network model for ozone concentration estimation and Monte Carlo analysis. Atmos. Environ. 2018;184:129–139. doi: 10.1016/j.atmosenv.2018.03.027. [DOI] [Google Scholar]
- 33.Zhu L, Liu M, Song J. Spatiotemporal variations and influential factors of tropospheric ozone concentration over china based on OMI data. Atmosphere. 2022;13(2):253–253. doi: 10.3390/atmos13020253. [DOI] [Google Scholar]
- 34.Yu R, Lin Y, Zou J, Dan Y, Cheng C. Review on atmospheric ozone pollution in China: Formation, spatiotemporal distribution, precursors and affecting factors. Atmosphere. 2021;12(12):1675–1675. doi: 10.3390/atmos12121675. [DOI] [Google Scholar]
- 35.Upadhaya P, Du H, Kommalapati RR. Meteorological detrending of ozone at three sites in the Dallas-Fort worth area: Application of KZ filter method. Atmosphere. 2020;11(11):1226–1226. doi: 10.3390/atmos11111226. [DOI] [Google Scholar]
- 36.Min KS, Keun KY, Yeon AH, Hee KY, Hee JJ. Impacts of local meteorology caused by tidal change in the west sea on ozone distributions in the Seoul Metropolitan Area. J. Environ. Sci. Int. 2019;28(3):341–356. doi: 10.5322/JESI.2019.28.3.341. [DOI] [Google Scholar]
- 37.Michał C, Marek P. Intrusion detection approach based on optimised artificial neural network. Neurocomputing. 2021;452:705–715. doi: 10.1016/j.neucom.2020.07.138. [DOI] [Google Scholar]
- 38.Dechao C, Shuai L, Liefa L. A recurrent neural network applied to optimal motion control of mobile robots with physical constraints. Appl. Soft Comput. J. 2019;85:105880. doi: 10.1016/j.asoc.2019.105880. [DOI] [Google Scholar]
- 39.Dong L, Zhongrui F, Qiang F, Mo L, Muhammad AF, Shoaib A, Tianxiao L, Liangliang Z, Muhammad IK. Random forest regression evaluation model of regional flood disaster resilience based on the whale optimization algorithm. J. Cleaner Product. 2019;250:119468. [Google Scholar]
- 40.Lau KL, Siti NAMJ, Luqman CA, Nik NLNI, Adeyi AA, Mohsen N. Application of feed-forward and recurrent neural network in modelling the adsorption of boron by amidoxime-modified poly(acrylonitrile-co-acrylic acid) Environ. Eng. Res. 2020;252:830. [Google Scholar]
Associated Data
This section collects any data citations, data availability statements, or supplementary materials included in this article.
Data Availability Statement
The datasets used and/or analysed during the current study available from the corresponding author on reasonable request.