

Abstract
The transportation environment of smart cities is complex and ever-changing, and traffic flow is influenced by various factors. With the increase of traffic flow in smart cities, optimizing traffic intersection signal control has become an important method to improve traffic efficiency and reduce congestion. To this end, a smart city traffic intersection(SCTI) signal control optimization method based on adaptive artificial fish swarm algorithm was studied. Establish the Equation of state of traffic flow at SCTIs to understand the actual traffic flow at SCTIs. On this basis, design SCTI signal control parameters, with the minimum average delay and average number of stops as objective functions, and construct an optimization model for SCTI signal control. By combining chaotic search theory and adaptively improving the artificial fish swarm algorithm, based on the adaptive artificial fish swarm algorithm, the intelligent city traffic intersection signal control optimization model is solved to achieve intelligent city traffic intersection signal control optimization. The experimental results show that the average delay of this method is 7.8 ms, the average number of stops is 2, and the travel time is 68.4 s s. Thus, it is proved that the method in this paper has a good optimization effect of traffic signal control at smart city intersections, which can improve the optimization efficiency of traffic signal control at smart city intersections and reduce traffic congestion at smart city intersections.
Keywords: Adaptive artificial fish school algorithm, Smart city, Traffic intersections, Optimization of signal light control, Chaotic search
1. Introduction
Smart cities emphasize the rapid development of cities in informatization, digitalization and intelligence. With the progress and innovation of science and technology, smart cities have become an important direction of urban development, aiming at improving the sustainability, quality of life and economic benefits of cities [[1], [2], [3]]. Under the background of smart city, intelligent transportation, as an important part of it, has received more and more attention and application. Intelligent transportation intelligently manages and optimizes the urban transportation system by comprehensively applying information technology, communication technology, big data, artificial intelligence and other means. Intelligent urban transportation system uses big data, sensor networks and other technologies to collect, analyze and utilize traffic data. By monitoring and analyzing real-time traffic conditions, urban managers can make more accurate and effective decisions and respond to traffic problems in time [4]. Intelligent traffic lights, intelligent parking guidance system, intelligent public transportation and other technical means are adopted to optimize traffic flow, reduce traffic congestion and improve traffic efficiency [5,6]. Encourage and support sustainable modes of transportation, such as public transportation, cycling and walking. By providing convenient public transport services, building cycling streets and pedestrian streets, we can reduce the use of private cars, reduce environmental pollution and improve the travel experience of urban residents. In this context, the optimization of signal light control at traffic intersections in smart cities has become a hot issue.
Reference [7] proposes dynamic traffic light control methods with different priorities. The dynamic state constructor is used to control the signal combination conversion of traffic lights. By designing duration particles and enhancement particles, the quantum particle swarm optimization algorithm is rebuilt to allocate intersections with different optimization priorities. However, this method has a long travel time. Reference [8] proposes an optimization method for traffic signal control based on deep reinforcement learning. By extending the centralized traffic signal learning and decentralized execution mode of Actor-Critic strategy gradient algorithm, critics use additional information to simplify the traffic signal control process and complete the traffic signal control optimization. However, the average delay time of this method needs to be verified. Reference [9] puts forward an artificial fish swarm algorithm to optimize dynamic fuzzy neural network. Taking the reciprocal of the average delay of vehicles as the food concentration of AFSA, and taking the weights and thresholds of dynamic fuzzy neural network that need to be corrected as the individual state of artificial fish, a set of optimal parameters of dynamic fuzzy neural network are obtained through iterative updating, so as to realize the multi-phase phase phase-change sequence intelligent control of five forks. However, this method has a high average number of stops. Reference [10] puts forward the urban green wave traffic control system. The adaptive mechanism and crossover and mutation operators are introduced into the artificial fish swarm algorithm to adjust the evolutionary population. By setting up bulletin board measures and retaining strategies, the individual state of the optimal artificial fish is recorded, and the green wave traffic control at continuous intersections is completed. However, this method has the problem of poor control effect. Reference [11] proposes artificial fish swarm algorithm, chaotic search and feedback strategy based on signal timing optimization theory. Taking the average of vehicle delay and parking number as the goal, the optimization algorithm is used to improve the intersection timing scheme of the target road. However, this method has the problem of low efficiency. Reference [12] proposes a dynamic traffic signal system based on density. In the intelligent traffic signal, the target detection is processed and transformed, and various features are extracted. According to the calculated threshold, the contour is drawn, the vehicle density and quantity are known, and the signal distribution is completed. However, this method has high computational complexity. Reference [13] proposes an adaptive real-time traffic light control algorithm based on traffic flow. Using neural network and YOLOv3 framework, single image processing is carried out, traffic permission is established at the signal, and traffic flow distribution at traffic intersections is completed. However, the control efficiency of this method for traffic intersection signal lights needs to be verified. Reference [14] puts forward an intelligent traffic monitoring system based on pc, which captures the images of vehicles and pedestrians, helps cities optimize traffic flow and reduce congestion. According to the emergency vehicles in each lane, intelligently decide when to change signals, thus increasing road capacity and traffic flow. However, this method is easy to cause data redundancy.
In response to the above issues, a SCTI signal control optimization method based on adaptive artificial fish swarm algorithm was studied. By establishing the Equation of state of traffic flow at SCTI, design the control parameters of SCTI signal lights, and build the optimization model of SCTI signal light control. By combining chaotic search theory with adaptive artificial fish swarm algorithm, an optimization model for traffic signal control at intersections in smart cities is solved. The optimization effect of SCTI signal control using this method is good, which can improve the optimization efficiency of SCTI signal control and reduce congestion at SCTI. The contributions of this method are as follows.
-
(1)
Most of the traditional traffic signal control methods only consider setting a fixed time interval, which can't be flexibly adapted when the actual traffic flow changes greatly. In this paper, the control parameters of traffic lights are dynamically adjusted according to the real-time traffic flow to achieve the goal of minimum average delay and average parking times.
-
(2)
By establishing the state equation of traffic flow at traffic intersections in smart cities, the actual traffic flow at traffic intersections can be accurately understood, so that the optimization of control parameters of traffic lights is more accurate and effective.
-
(3)
In order to further improve the optimization effect of the algorithm, the chaotic search theory is used to improve the artificial fish swarm algorithm adaptively. Chaos search theory can increase the diversity of algorithms and find the optimal solution more comprehensively in the search space. By combining chaos search theory, this method can better adapt to the dynamic characteristics of traffic flow changes at traffic intersections and improve the effect of signal light control.
2. Establish the Equation of state of traffic flow at traffic intersections in smart cities
The traffic network structure has an important influence on the traffic efficiency of smart cities. In the actual urban traffic system, the traffic network is usually composed of complex road networks, including main roads, secondary roads, branch roads and other roads of different grades. There may be differences in traffic flow, speed and road width of these roads. Therefore, this paper establishes the traffic flow state equation of SCTI, and understands the actual traffic flow of SCTI through this equation.
In a SCTI signal light cycle [[15], [16], [17]], the set of time interval corresponding to the signal light of SCTI is , and the time of green light in time interval in SCTI is . The cycle constraint of traffic signal lights at smart city intersections is:
| (1) |
Where, is the number of cycles, is the saturated traffic flow in , and is the loss time of traffic intersections in smart cities.
Constraints limit the time of green light at SCTI as follows:
| (2) |
Where, is the minimum time allowed for the green light at the intersection of smart cities, and is the maximum time allowed for the green light at the intersection of smart cities.
The traffic flow of vehicles at the intersection of smart cities is:
| (3) |
Where, is the vehicle speed and is the vehicle flow from the connecting section .
Set the road width as , the interval between any time periods in the period as [18,19], and the state equation of traffic flow at the intersection of smart cities is:
| (4) |
Where, is the allowed flow of vehicles in the continuous section , and is the time when the green light flashes in the signal period of SCTI. Establishing the state equation of traffic flow at traffic intersections in smart cities can provide real-time traffic flow information, predict congestion and provide accurate and timely data support for traffic managers.
3. Building an optimization model for traffic signal control at intersections in smart cities
SCTI is an important node in the urban traffic network, and its design also has an important impact on the traffic efficiency of smart cities. The design of traffic intersections in smart cities includes the number of lanes, the width of lanes, the timing of signal lights and other parameters, which have a direct impact on the traffic efficiency of vehicles. After establishing the Equation of state of traffic flow at the SCTI, the optimization model of traffic light control at the SCTI is constructed. The Equation of state of traffic flow at the SCTI is taken as the input parameter of the optimization model to determine the optimal optimization strategy of traffic light control.
In a week, the time required for the change of the phase sequence of the traffic signal lights at SCTI is the signal period [[20], [21], [22]]. The short signal period of SCTI will reduce the traffic capacity of SCTI, while the long signal period of SCTI will increase the average delay time of vehicles. Effective green time refers to the actual effective time when the traffic light is green, and vehicles can use this green time period to pass through the intersection. This time period includes the acceleration of the vehicle starting, the time during driving and the possible waiting time to ensure the vehicle passing through the intersection smoothly. The setting of time parameters of traffic lights at smart city intersections has a direct impact on the control of traffic lights at smart city intersections. The time parameters of traffic lights at smart city intersections set in this paper are shown in Table 1.
Table 1.
Time parameter settings for traffic signal lights at smart city intersections.
| Name | Time |
|---|---|
| Green light | Phase green light time ≤70s; Main road green light time ≥15s; The green light time on the secondary main road is ≥ 8 s. |
| Yellow light | Normally set to 3 s |
| Red light | Red light time under unsaturated traffic conditions ≤120s; Under saturated traffic conditions, the red light time is ≤ 150s. |
According to the parameters shown in Table 1, set the signal time parameters for SCTIs to ensure that the SCTIs are in a normal and orderly traffic state in real time.
Improper control of traffic lights at intersections will easily lead to traffic delays and increase the overall traffic congestion. Therefore, minimizing the average delay can effectively reduce the time for vehicles to stay at intersections, improve the efficiency of vehicles passing through intersections, and relieve traffic pressure. In terms of average delay , the calculation is mainly based on the sum of random delay and consistent delay [[23], [24], [25]]. The calculation process of random delay and consistent delay is shown in (5), (6):
| (5) |
| (6) |
Where, is the saturation of the inlet in phase , is the actual traffic volume at the inlet in phase , and is the flow ratio at the inlet in phase .
The calculation of the average delay required in this article can be obtained by weighting the average delay of different signal phases:
| (7) |
Where, is the average delay of the phase, and is the actual traffic flow of the phase.
Too long signal light period will lead to frequent parking of vehicles, increase the time of vehicle queuing and parking times, and reduce the overall operating efficiency of the transportation system. By minimizing the average number of stops, the number of stops at intersections can be reduced, the delay time of vehicles can be reduced, and the traffic efficiency can be improved. In terms of the average number of stops, in order to ensure normal traffic at smart city intersections, efforts should be made to avoid secondary parking of vehicles and strive to fully release all vehicles within a cycle [[26], [27], [28]]. The calculation process of the average number of stops is shown in formula (8):
| (8) |
The calculation method for the average number of vehicle stops required in this article is obtained through weighted calculation:
| (9) |
By optimizing the control parameters of traffic lights, the delay time of vehicles can be reduced, and the number of vehicle stops can be reduced, thus improving the traffic capacity of intersections and the operating efficiency of the overall traffic system. By taking the average delay index and the average number of stops as the objective function, the intersection traffic can be smoother and more efficient to the greatest extent.
The weighting coefficient is introduced, and is set to represent the signal phase of SCTI, and the signal period of SCTI satisfies and less than or equal to 200s. The cycle time consists of green light time and lost time . If the saturation needs to be 0.6–0.9 to maintain good traffic conditions at SCTI, then:
| (10) |
Establishing the optimization model of traffic signal control at intersections in smart cities:
| (11) |
4. Optimization model solution based on adaptive artificial fish swarm algorithm
Based on the establishment of an optimization model for traffic signal control at smart city intersections, an adaptive artificial fish swarm algorithm is used to solve the optimization model for traffic signal control at smart city intersections. The artificial fish swarm algorithm is a population intelligent optimization algorithm. The basic idea is to simulate the foraging behavior, tail chasing behavior, and herd behavior of fish [[29], [30], [31]]. This algorithm can be used to solve various continuous optimization problems and Combinatorial optimization problems.
Assuming that the current state of an artificial fish is , set its field of view to , and the viewpoint position of the artificial fish at a certain moment is . When the position state of the viewpoint is better than the current artificial fish state, the artificial fish can choose to move one step in that direction to reach state ; If the state of the viewpoint is not better than the current state of the artificial fish, continue to search for other positions within the field of view. As the number of searches increases, artificial fish have a more comprehensive understanding of the surrounding environment, enabling them to have a more comprehensive understanding of the surrounding environment, which helps make corresponding judgments and decisions.
Reasonable adjustment of green signal ratio can directly affect the traffic flow in different directions. Priority is given to setting the green light time for straight and left-turning vehicles at peak hours to meet the demand of main traffic flow, thus reducing waiting time and improving traffic efficiency. In the low peak period, set a balanced green signal ratio according to the actual situation to avoid excessive waiting and wasting traffic resources. Among them, state and position , then the process can be represented as follows:
| (12) |
Where, the function is used to generate a random number between 0 and 1, and is the step size of the artificial fish movement. Because the number of companions in the environment is limited, artificial fish will perceive the state of their companions in their field of vision and adjust their own state accordingly.
The variable section includes the total number of artificial fish , the state of individual artificial fish , the field of view of the artificial fish, the crowding factor , the maximum step length of the artificial fish movement , the number of attempts , and the distance between individual artificial fish , calculated as follows:
| (13) |
The function section includes the food concentration at the current location of the artificial fish, where is the objective function value. Through encapsulation, the state of artificial fish can be perceived by other companions.
Chaotic phenomena have the characteristics of certainty, randomness, and ergodicity. Certainty refers to the fact that chaotic trajectories are usually generated by determined iterative formulas; Randomness refers to the sensitivity of the trajectory of chaotic phenomena to initial values; Ergodicity refers to the ability of chaotic trajectories to experience all states without repetition within a certain range of intervals. In response to the problem of low global optimization ability and easy falling into local optima in the artificial fish swarm algorithm, by combining chaos search theory [[32], [33], [34]], the artificial fish swarm algorithm is adaptively improved to achieve the optimization model solution of traffic intersection signal control in smart cities. Consider an optimization model problem with -dimensional variables, where is the decision variable and the range of the variable is . The implementation process for solving the optimization model based on the adaptive artificial fish school algorithm is as follows:
Step 1: Initially, let map the dimensional decision variable to the chaotic variable using formula (14):
| (14) |
Step 2: Based on , use chaotic mapping to generate the next generation of chaotic variable :
| (15) |
Step 3: Use formula (16) to map chaotic variable to decision variable :
| (16) |
Step 4: Evaluate the advantages and disadvantages of the new decision variable ;
Step 5: If the new decision variable is better than , output as the local search result of the chaotic search; otherwise, return to step 2 with another ; There are many mapping methods for the chaotic mapping in step 2, and the chosen one here is the Logistic mapping. The iterative equation for the Logistic mapping is as follows:
| (17) |
In formula (17), is the control parameter. When , formula (17) will be in a chaotic state, which means that except for points 0, 0.25, 0.50, 0.75, and 1, all other points will be generated through iterative formulas, and they are all within the range of 0–1.
Through the above steps, optimization of traffic signal control at intersections in smart cities based on adaptive artificial fish swarm algorithm is achieved.
5. Experimental analysis
In order to verify the effectiveness of the intelligent city traffic intersection signal light control optimization method based on adaptive artificial fish swarm algorithm, this paper takes Xi 'an traffic intersection as an actual case to model and optimize. Choose an intersection in Xi 'an as a traffic scene. There are both east-west traffic and north-south traffic at the intersection. All directions are two-way lanes, including three traffic directions: straight, left and right turns. At this intersection, an intelligent traffic signal control system is set up. By monitoring the traffic flow and collecting sensor data in real time, combined with traffic management strategy, the traffic signal is optimally controlled. 12 detectors are set at the intersection, covering all key positions at the intersection, and comprehensively grasping the flow direction of different vehicles. The specific traffic scene is shown in Fig. 1.
Fig. 1.

Traffic intersections and lanes.
According to Fig. 1, straight lanes and left-turn lanes are set in the east-west direction, and the number of turning lanes is adjusted according to the traffic flow. Set the corresponding signal light phase, so that straight and left-turning vehicles can reasonably pass alternately. There are also straight lanes and left-turn lanes in the north-south direction, and the number of turning lanes is adjusted according to the traffic flow, and the corresponding signal lights are set to make the straight and left-turn vehicles pass according to reasonable priority. Set up a right-turn lane on the right side of each direction, and set the corresponding right-turn signal phase, so that right-turn vehicles can pass quickly.
In order to effectively carry out the optimization test of traffic signal control at traffic intersections, an experimental test is carried out on VISSIM traffic simulation software. The operating system is Ubuntu 18.04, the CPU is Intel i5-5200U, the main frequency is 2.2 GHz, the physical memory is 64 GB, the programming language is JAVA, and the deep learning framework is TensorFlow 2.0. The parameter setting of the optimization model based on adaptive artificial fish swarm algorithm is shown in Table 2.
Table 2.
Algorithm implementation setting parameters.
| Parameter | Value |
|---|---|
| Total number of artificial fish | 1000 |
| Visual field of artificial fish | 2 m × 2 m |
| Congestion factor | 0.5 |
| Maximum step length of artificial fish movement | 1 |
| Number of attempts | 30 |
| Signal lamp phase | 55s |
| Lane width | 3.5 m |
| Driving speed | 40–60 km/h |
| Steering ratio | 20 % |
5.1. Experimental preparation
VISSIM is a professional microscopic traffic simulation software, which is mainly used for the simulation and analysis of urban traffic and highway traffic. It can simulate the driving situation of vehicles in the road network, including vehicle acceleration, deceleration, lane change, parking and other behaviors, and can provide rich traffic flow data and performance indicators. In the VISSIM traffic simulation software, the urban traffic conditions are simulated according to the parameter settings in Table 2, and the corresponding signal light control and management functions are provided. Perform the test according to the test case, record the values such as car flow and parking record, and track the abnormal situation. The specific process is shown in Fig. 2.
Fig. 2.
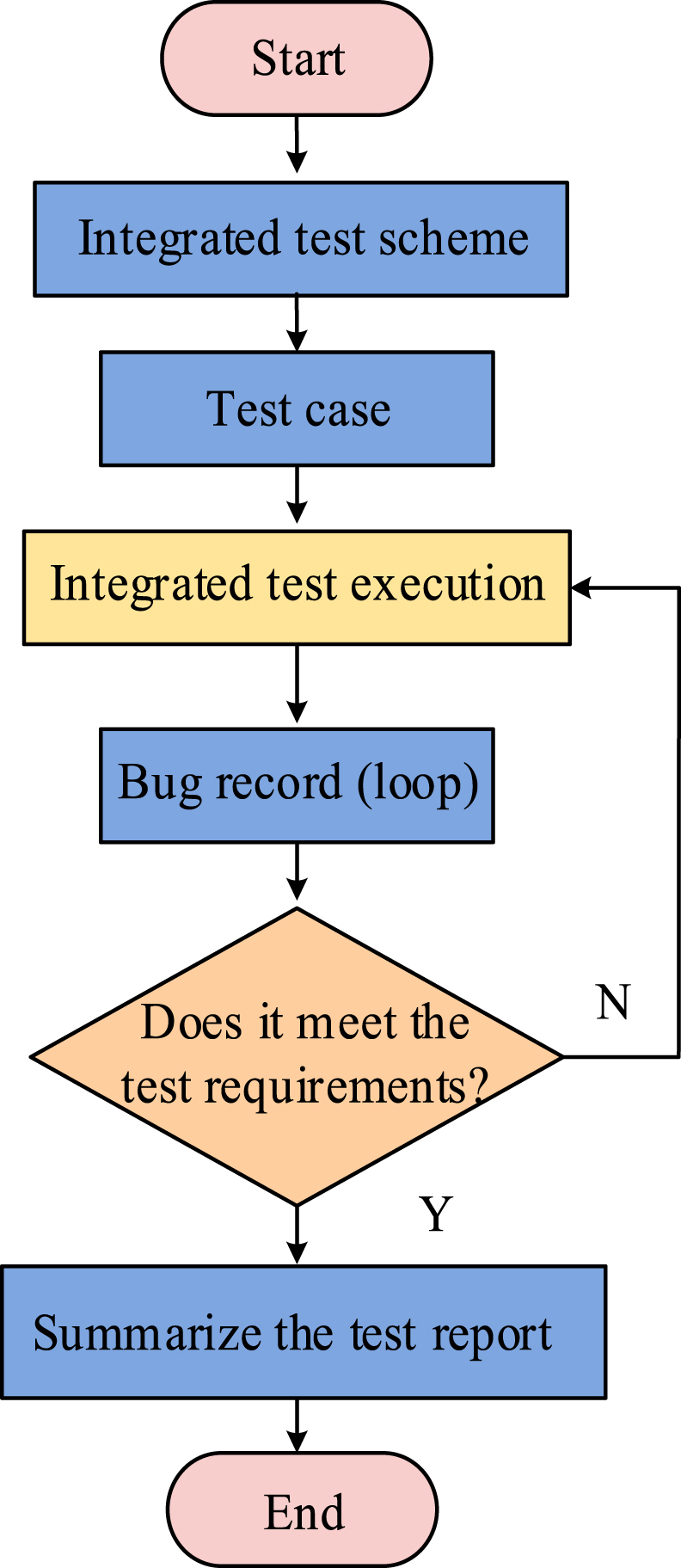
Experimental flow chart.
5.2. Experimental results
5.2.1. Optimization effect of traffic intersection signal light control in smart cities
In order to verify the optimization effect of SCTI signal control using the method proposed in this article, the average delay and average number of stops are used as evaluation indicators. The smaller the average delay and average number of stops, the better the optimization effect of SCTI signal control. This article incorporates the methods of this article, the method of reference [7], and the method of reference [8] into VISSIM and conducts simulation experiments. Twelve detectors are set to measure the positions, and the average delay and average stopping times of the three methods are obtained as shown in Fig. 3.
Fig. 3.

Average delay and average number of stops for three methods.
From Fig. 3, it can be intuitively seen that the average delay and average stopping times results of the method proposed are significantly smaller than those of the method of reference [7] and the method of reference [8]. In this optimization model, the average delay and average stopping times generated by SCTI are effectively reduced, and the current traffic situation of SCTI is improved. From this, it can be seen that the optimization effect of the intelligent city traffic intersection signal control using the method proposed in this article is good.
5.2.2. Optimization efficiency of traffic intersection signal light control in smart cities
Further validate the rationality of the intelligent city traffic intersection signal control optimization method proposed in this article, using travel time as an evaluation indicator. The smaller the travel time, the higher the efficiency of intelligent city traffic intersection signal control optimization. By comparing the method of reference [7] and the method of reference [8], and this article, the travel times of the three methods are shown in Table 3.
Table 3.
Travel time for three methods/s.
According to Table 3, as the traffic flow at smart city intersections increases, the travel time of the three methods also increases. When the traffic flow at smart city intersections reaches 140 veh/h, the travel time of the method of reference [7] and the method of reference [8] is 81.5 s and 76.6 s, respectively, while the travel time of the method proposed is only 68.4 s. From this, it can be seen that compared with the method of reference [7] and the method of reference [8], the travel time of this method is smaller, indicating that through the optimization of traffic signal control in smart city intersections, this method effectively improves the efficiency of traffic signal control optimization in smart city intersections and reduces traffic congestion in smart city intersections.
5.3. Discussion
The method in this paper performs well in the test of optimization effect of traffic signal control at smart city intersections, and its average delay and average parking times are low. This is mainly due to the in-depth understanding of the actual traffic flow when establishing the traffic flow state equation of smart city traffic intersections, and based on this, the control parameters of traffic lights are designed. At the same time, taking the minimum average delay and average parking times as the objective function, an optimization model of traffic signal control at smart city intersections is constructed, which effectively reduces the average delay and average parking times and improves the traffic status of smart city intersections.
In the efficiency test of traffic signal light control optimization in smart cities, this method also performs well. With the increase of traffic volume at smart city intersections, the travel time of the three methods will increase. However, when the traffic volume reaches 140veh/h, the travel time of this method is only 68.4 s s. In this paper, the adaptive artificial fish swarm algorithm is selected as the optimization method, which has strong global search ability and diversity. By dynamically adjusting the parameters and behavior rules of artificial fish swarm algorithm, the algorithm can better adapt to different traffic flow changes and find better control parameters of traffic lights. At the same time, the adaptive artificial fish swarm algorithm is improved by combining chaotic search theory. Chaos search theory can increase the diversity of algorithms, and thus search the optimal solution more comprehensively. In this way, this method can better adapt to the dynamic characteristics of traffic flow changes at different traffic intersections and improve the effect of signal light control.
To sum up, the method in this paper is excellent in the optimization effect and efficiency of traffic signal control at smart city intersections, which is mainly due to its in-depth understanding of the actual traffic flow, the optimization model design with the minimum average delay and average parking times as the objective function, and the efficient solution of the adaptive improved artificial fish swarm algorithm based on chaotic search theory. These advantages make this method have high application value and popularization prospect in the field of traffic intersection signal light control optimization in smart cities.
5.4. Control strategy of traffic intersection signal lights in smart cities
In the past 30 years, more than 8000 pedestrians in Australia have died in road traffic accidents [35]. The vulnerability of pedestrians to road collision conflicts with the sustainable traffic goal. In order to improve the safety of these vulnerable road users, machine learning algorithm is used to control the traffic lights at traffic intersections. The results of this study show that the traffic efficiency of traffic intersections in smart cities can be improved and congestion can be reduced by optimizing the control of traffic lights. Therefore, urban management departments should pay attention to the optimization of traffic signal control at traffic intersections as an important means to improve urban traffic conditions. The study of travel mode selection is an important task in forecasting travel demand in transportation planning and policy making [36]. Usually, the data set of pattern selection is unbalanced, and the unbalanced pattern can be dealt with based on support vector machine model and kernel scale adjustment theory. In this study, considering the actual traffic flow, the state equation of traffic flow is established, and the control parameters of traffic lights are designed on this basis. Therefore, when implementing the optimization of signal light control, we should fully understand the actual traffic flow, including the traffic flow during peak hours and off-peak hours, so as to formulate a more reasonable optimization scheme.
Health and transportation are interrelated in many stages, for example, transportation affects health, and health affects transportation choice, which shows that health is a permanent restriction [37]. Traffic intersections in smart cities usually involve pedestrians and other non-motor vehicles. Therefore, in the process of signal light control optimization, we should consider the needs of pedestrians and non-motor vehicles, arrange the traffic time reasonably, improve the traffic efficiency of intersections, and ensure the safety of pedestrians and non-motor vehicles. Time use interacts with activities, travel participation, built environment and social health [38], and there is a nonlinear relationship between car ownership and social population factors and the quality of built environment [39]. At the same time, bike-sharing is also considered as a sustainable mode of transportation [40]. In this study, the artificial fish swarm algorithm is improved adaptively by combining chaotic search theory, and the efficient control optimization of traffic lights is realized. Therefore, urban management departments can introduce advanced optimization algorithms to further improve the efficiency and accuracy of traffic light control optimization, thus improving the travel behavior of urban cars and bike-sharing and promoting the sustainable development of the built environment.
Travel mode selection prediction is an important part of travel demand prediction, and the negative consequences of automobile use are alleviated by using optimized machine learning methods [41]. The optimization of traffic signal control at traffic intersections in smart cities needs to strengthen the support of traffic planning and management, and urban management departments should rationally plan road networks to improve the utilization rate and traffic capacity of roads. At the same time, strengthen traffic management, including publicity and enforcement of traffic regulations, traffic guidance and flow control, to further alleviate the urban traffic congestion problem.
6. Conclusion
Smart city is an urban model based on intelligent technology and realizing urban management and service through information technology. As an important part of urban traffic system, the smooth and efficient operation of traffic intersections is very important to improve urban traffic efficiency and residents' travel experience. Therefore, an optimization method of traffic intersection signal light control in smart cities based on adaptive artificial fish swarm algorithm is proposed. By establishing the state equation of traffic flow at traffic intersections in smart cities and optimizing the control of traffic lights, traffic delays and parking times can be significantly reduced, thus improving the traffic capacity of traffic intersections, helping to alleviate the problem of urban traffic congestion and making urban traffic more efficient and smooth. Design the control parameters of traffic signal lights at smart city intersections, construct the optimization model of traffic signal lights at smart city intersections, and make intelligent adjustment according to real-time traffic flow, so as to realize intelligent and dynamic traffic signal control. Based on the adaptive artificial fish swarm algorithm, the optimization model of traffic signal control at smart city intersections is solved, which gradually improves the efficiency and operation level of the whole urban traffic system and promotes the wider progress of the traffic system. The experimental results show that this method has good control optimization effect and high control optimization efficiency. The average delay is 7.8 ms, the average number of stops is 2 times, and the travel time is 68.4s.
However, there are still some limitations in this method. This method only considers the signal control at traffic intersections, and does not consider the influence of other traffic management strategies on traffic efficiency. At the same time, this method mainly pays attention to the traffic efficiency of vehicles, but does not consider the traffic safety and convenience of pedestrians and non-motor vehicles.
Future research can further expand and improve this method, and comprehensively consider a variety of traffic management strategies, such as roadside parking management, public transport priority, etc., in order to achieve more comprehensive traffic optimization. In addition, we can pay more attention to the traffic safety and convenience of pedestrians and non-motor vehicles in order to realize more humanized traffic management.
Data availability statement
The data used to support the findings of this study are available from the corresponding author upon request.
CRediT authorship contribution statement
Jingya Wei: Writing – review & editing, Writing – original draft, Software, Project administration, Methodology, Formal analysis, Data curation, Conceptualization. Yongfeng Ju: Writing – review & editing, Writing – original draft, Supervision, Software, Resources, Methodology, Formal analysis, Data curation, Conceptualization.
Declaration of competing interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
References
- 1.Saleemi H., Rehman Z.U., Khan A.H., Aziz A. Effectiveness of intelligent transportation system: case study of Lahore safe city. Transportation Letters. 2022;14(8):898–908. [Google Scholar]
- 2.Lakshmi K., Nagineni S., Lydia E.L., Saviour Devaraj A.F., Nandan Mohanty S., Pustokhina I.V., Pustokhin D.A. An optimal deep learning for cooperative intelligent transportation system. Comput. Mater. Continua (CMC) 2022;72(1):19–35. [Google Scholar]
- 3.Asadi M., Fathy M., Mahini H., Rahmani A.M. A systematic literature review of vehicle speed assistance in intelligent transportation system. IET Intell. Transp. Syst. 2021;15(8):973–986. [Google Scholar]
- 4.Ducrocq R., Farhi N. Deep reinforcement Q-learning for intelligent traffic signal control with partial detection. International Journal of Intelligent Transportation Systems Research. 2023;21(1):192–206. [Google Scholar]
- 5.Wei Z., Peng T., Wei S. A robust adaptive traffic signal control algorithm using Q-learning under mixed traffic flow. Sustainability. 2022;14(10):1–16. [Google Scholar]
- 6.Zhang R., Ishikawa A., Wang W., Striner B., Tonguz O.K. Using reinforcement learning with partial vehicle detection for intelligent traffic signal control. IEEE Trans. Intell. Transport. Syst. 2020;22(1):404–415. [Google Scholar]
- 7.Wang H., Liu R., Wang P., Liu G., Wang H., Yan L. Intelligent optimization of dynamic traffic light control via diverse optimization priorities. Int. J. Intell. Syst. 2021;36(11):6748–6762. [Google Scholar]
- 8.Li Z., Xu C., Zhang G. A deep reinforcement learning approach for traffic signal control optimization. Transport. Res. C Emerg. Technol. 2021;104:234–248. [Google Scholar]
- 9.Tang M.A., Dong H.L., Cheng H.P. Traffic signal optimization control in five-road intersection based on artificial fish swarm algorithm. Control Eng. China. 2019;26(7):1284–1290. [Google Scholar]
- 10.Ma C., He R. Green wave traffic control system optimization based on adaptive genetic-artificial fish swarm algorithm. Neural Comput. Appl. 2019;31(7):2073–2083. [Google Scholar]
- 11.Lu B., Wang Q., Wang Y. An improved artificial fish swarm algorithm for traffic signal control. International Journal of Simulation and Process Modelling. 2019;14(6):488. [Google Scholar]
- 12.Pallavi B., Aryan P., Pruthvi S., Sakshi S. Smart traffic signal control system. International Journal of Advanced Research in Science, Communication and Technology. 2023;34(1):337–342. [Google Scholar]
- 13.Khan H., Kushwah K.K., Maurya M.R., Saurabh S., Prashant J., et al. Machine learning driven intelligent and self adaptive system for traffic management in smart cities. Computing. 2022;104(5):1203–1217. [Google Scholar]
- 14.Ramachandran L., Abitha V., Priyadharshini J., Subalakshmi S., Swetha S. Intelligent based real time traffic monitoring in smart cities. Irish Interdisciplinary Journal of Science & Research. 2023;7(2):10–15. [Google Scholar]
- 15.Chaudhuri H., Masti V., Veerendranath V., Natarajan S. A comparative study of algorithms for intelligent traffic signal control. Machine Learning and Autonomous Systems: Proceedings of ICMLAS. 2022;437(1):271–287. [Google Scholar]
- 16.Jaber Abougarair A., Edardar M. Adaptive traffic light dynamic control based on road traffic signal from google maps. The 7th International Conference on Engineering & MIS. 2021;11(5):1–9. [Google Scholar]
- 17.Agrawal P., Kumari P., Dutta M. Designing traffic signal at an unsignalized intersection. International Journal of Scientific Research in Science and Technology. 2021;8(3):90–107. [Google Scholar]
- 18.Suresh S., Rashmi L., Sowmya P., Tanushree S., Ramakrishna M. Smart traffic light control system with Automatic vehicle speed Breaker. International Research Journal of Computer Science. 2023;10(4):58–68. [Google Scholar]
- 19.Ahmed H.M., Alsola i H., Alzahrani J.S., Alamgeer M., Sayed M.M., et al. Intelligent Slime Mould optimization with deep learning enabled traffic prediction in smart cities. Comput. Mater. Continua (CMC) 2022;73(3):6563–6577. [Google Scholar]
- 20.Liu M., Zhao J., Hoogendoorn S., Wang M. A single-layer approach for joint optimization of traffic signals and cooperative vehicle trajectories at isolated intersections. Transport. Res. C Emerg. Technol. 2022;134 [Google Scholar]
- 21.Terraza M., Zhang J., Li Z. Intersection signal timing Optimisation for an urban street network to Minimise traffic delays. Promet - Traffic & Transp. 2021;33(4):579–592. [Google Scholar]
- 22.Yao K., Chen S. Resilience-based adaptive traffic signal strategy against disruption at single intersection. J. Transport. Eng., Part A: Systems. 2022;148(5) [Google Scholar]
- 23.Kurungadan B., Abdrabou A. Using software-Defined networking for data traffic control in smart cities with WiFi coverage. Symmetry. 2022;14(10):2053. [Google Scholar]
- 24.Alkhatib A.A.A., Maria K.A., Alzu’bi S., Maria E.A. Smart traffic Scheduling for crowded cities road networks Egyptian Informatics. Journal. 2022;23(4):163–176. [Google Scholar]
- 25.Guo J., Huang X., Li R., Li Z., Sun N., et al. Based on MOPSO algorithm of real-time traffic signal optimization control for intelligent transportation intersections. J. Phys. Conf. 2023;2477(1) [Google Scholar]
- 26.Khan N.U., Shah M.A., Maple C., Ahmed E., Asghar M.N. Traffic flow prediction: an intelligent scheme for forecasting traffic flow using Air pollution data in smart cities with Bagging Ensemble. Sustainability. 2022;14(7):4164. [Google Scholar]
- 27.Devi T., Alice K., Deepa N. Traffic management in smart cities using support vector machine for predicting the accuracy during peak traffic conditions. Mater. Today: Proc. 2022;62(1):4980–4984. [Google Scholar]
- 28.Catherine K. Secure signaling and traffic exchanges in smart cities: a critical review of the current trends. Global Journal of Engineering and Technology Advances. 2022;12(3):26–41. [Google Scholar]
- 29.Yuan M., Kan X., Chi C., Cao L., Shu H., Fan Y. An adaptive simulated annealing and artificial fish swarm algorithm for the optimization of multi-depot express delivery vehicle routing. Intell. Data Anal. 2022;26(1):239–256. [Google Scholar]
- 30.Qingyao T.A.N.G., Ran W.U., Jiajia J.I. Research on illumination optimization of phototherapy LED based on multi-objective artificial fish swarm algorithm. Journal of Applied Optics. 2021;42(2):352–359. [Google Scholar]
- 31.Wang N., Huang S., Xiong X. Fuzzy image adaptive enhancement algorithm based on improved artificial fish populations. Comput. Simulat. 2022;39(10):229–233. [Google Scholar]
- 32.Mousa A.A.A., El-Shorbagy M.A., Mustafa I., Alotaibi H. Chaotic search based equilibrium optimizer for dealing with nonlinear programming and petrochemical application. Processes. 2021;9(2):200–210. [Google Scholar]
- 33.Fernandez-Ramirez K.I., Baltazar A., Kim J.Y. Chaotic search algorithm for detection of discontinuities using guided waves and beamforming data. Meas. Sci. Technol. 2020;32(3) [Google Scholar]
- 34.Abualigah L., Diabat A. Chaotic binary group search optimizer for feature selection. Expert Syst. Appl. 2022;192 doi: 10.1016/j.eswa.2022.116834. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 35.Tao W., Aghaabbasi M., Ali M., Almaliki A.H., Zainol R., et al. An advanced machine learning approach to predicting pedestrian Fatality caused by road Crashes: a step toward sustainable pedestrian safety. Sustainability. 2022;14(4):2436. [Google Scholar]
- 36.Qian Y., Aghaabbasi M., Ali M., Alqurashi M., Salah B., et al. Classification of Imbalanced travel mode choice to work data using adjustable SVM model. Appl. Sci. 2021;11(24) [Google Scholar]
- 37.Ali M., Dharmowijoyo D.B.E., Harahap I.S.H., Puri A., Tanjung L.E. Travel behaviour and health: Interaction of Activity-travel pattern, travel parameter and physical Intensity. Solid state technology. Solid State Technol. 2020;63(6):18–19. [Google Scholar]
- 38.Ali M., Dharmowijoyo D.B.E., Azevedo A.R.G., Fediuk R., Ahmad H., et al. Time-use and Spatio-Temporal variables influence on physical activity Intensity, physical and social health of Travelers. Sustainability. 2021;13(21) [Google Scholar]
- 39.Ma T., Aghaabbasi M., Ali M., Zainol R., Jan A., et al. Nonlinear relationships between vehicle ownership and Household travel characteristics and built environment Attributes in the US using the XGBT algorithm. Sustainability. 2022;14(6):3395. [Google Scholar]
- 40.Zhu L., Ali M., Macioszek E., Aghaabbasi M., Jan A. Approaching sustainable bike-sharing development: a systematic review of the influence of built environment features on bike-sharing Ridership. Sustainability. 2022;14(10):5795. [Google Scholar]
- 41.Aghaabbasi M., Ali M., Jasiński M., Leonowicz Z., Novák T. On Hyperparameter optimization of machine learning methods using a Bayesian optimization algorithm to predict work travel mode C. IEEE Access. 2023;11(1):19762–19774. [Google Scholar]
Associated Data
This section collects any data citations, data availability statements, or supplementary materials included in this article.
Data Availability Statement
The data used to support the findings of this study are available from the corresponding author upon request.