

Abstract
Soft robotics inspired by the movement of living organisms, with excellent adaptability and accuracy for accomplishing tasks, are highly desirable for efficient operations and safe interactions with human. With the emerging wearable electronics, higher tactility and skin affinity are pursued for safe and user‐friendly human–robot interactions. Fabrics interlocked by fibers perform traditional static functions such as warming, protection, and fashion. Recently, dynamic fibers and fabrics are favorable to deliver active stimulus responses such as sensing and actuating abilities for soft‐robots and wearables. First, the responsive mechanisms of fiber/fabric actuators and their performances under various external stimuli are reviewed. Fiber/yarn‐based artificial muscles for soft‐robots manipulation and assistance in human motion are discussed, as well as smart clothes for improving human perception. Second, the geometric designs, fabrications, mechanisms, and functions of fibers/fabrics for sensing and energy harvesting from the human body and environments are summarized. Effective integration between the electronic components with garments, human skin, and living organisms is illustrated, presenting multifunctional platforms with self‐powered potential for human–robot interactions and biomedicine. Lastly, the relationships between robotic/wearable fibers/fabrics and the external stimuli, together with the challenges and possible routes for revolutionizing the robotic fibers/fabrics and wearables in this new era are proposed.
Keywords: actuators, fibers/fabrics, power sources, sensors, soft robotics
A relation map of dynamic fibers/fabrics with responsive functions, including actuation, sensing, and energy harvesting, is built for potential construction of a soft, safe, user‐friendly human–robot interface. It promises the seamless integration between actuators, sensors, and power sources into fibers/fabrics, envisaging self‐regulated, autonomous, and intelligent robotic fibers/fabrics for daily functions and biomedical services.

1. Introduction
Human–robot interface (HRI) is an emerging smart interface that allows operations, interactions and collaborations between human and robots/machines in a colocated or coordinatedway, fulfilling works with higher efficiency or addressing some complicated/dangerous tasks. Soft robotics, often inspired by the adaptability of living organisms, are capable of delivering excellent mechanical adaptability to enable safe and friendly interactions with human. Fiber that has been known for thousands of years for textile engineering, is a kind of thin 1D material with large length–diameter ratio and softness. Fiber can be further processed into 1D or 3D yarns and 2D or 3D fabrics and can be subjected to well‐established textile manufacturing techniques, such as dyeing, twisting, sewing, knitting, weaving, braiding, etc.[ 1 ] As commercially available material, fabric has been widely used for clothing, bedding, or furniture. Such wide‐adoption demonstrates fabrics/textiles to be important and adaptable as daily useable material due to their merits of protection, breathability, comfort, and durability.[ 2 ] In recent years, novel smart responsive functions are desirable to be implemented on fibers and fabrics for seamless integrations of actuators, sensors, power sources, etc., to realize the robotic fibers/fabric‐based manipulators and human–robot interfaces. These emerging responsive fibers/fabrics are desirable to offer programmable functions, actuations, perception and capable of building an intuitive and dynamic collaborative scenarios with human, promising in enabling applications such as remote operation, human motion assistance, human perception, health monitoring and biomedical detection and therapy.[ 3 , 4 , 5 ] It is an attractive concept that the future human–robot interfaces could be embodied in familiar forms for humans such as textiles or clothes. Compared with the polymeric and elastomeric soft robotics,[ 6 , 7 , 8 , 9 ] fibers and fabrics are advantageous in applications of soft robotics and wearables for human. The devices could be programmable to have accurate designs in configuration and high performance by traditional manufacturing processes of textile, applying twist to transform fibers into coils, yarns with hierarchical structures, which could be further fabricated into fabrics or textiles by sewing, weaving, knitting, etc., techniques (Figure 1 ), guaranteeing good wearability, skin affinity, washability, and durability, which are intriguing and necessary for friendly robotics interactions with human.
Figure 1.
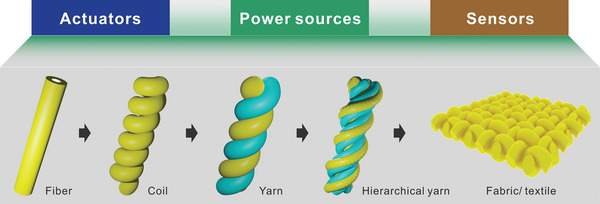
The available forms of fibers in 1D, 3D, and 2D configurations include yarns and fabric/textile for application in actuators, sensors, and power sources.
Soft robotics include three main components of actuators, sensors, and control modules with power sources.[ 10 , 11 ] Of which, actuators, sensors and power sources all could be designed in the form of fibers or fabrics, rendering facile assembly, and integration by interlocking.[ 12 ] Common actuations can be achieved under external stimuli such as electricity, light, heat, magnetic field, solvent, and vapor conditions, realizing various displacements in 1D, 2D, or 3D directions. For example, fiber actuators could deliver linear motion, enabling important applications in some special 1D or space‐limited scenarios, such as biomedical targeted delivery and therapy in vessels.[ 13 ] Twisting manipulation through internal contraction or relaxation forces could be realized using the yarn‐based actuators, capable of simulating the motions such as contraction, relaxation, and expansion, alike of artificial muscles for operating the robots and assisting the human motions especially the disabled.[ 14 ] Besides, weaving or knitting the actuation fibers and yarns could be further fabricated into fabric actuators, attaining higher actuation displacement and force, with the potential to produce smart garments that have active responses, such as thermal‐regulation under the stimuli from solvent/vapor, heat, light, electricity, magnetic field, etc., and self‐protection actions against mechanical attacks or invasions.[ 15 ] These smart responsive clothes are significant for improving the human perception and quality of life.
Sensors are essential for feedback‐control of the soft robots. Fiber/fabric‐based sensors possess intrinsic merits for wearable applications and human–robot interactions, providing good skin affinity and safer interactive platforms for users.[ 16 ] In terms of fabrication, fibers, yarns, and fabrics/textiles are all feasible to be designed as sensors, such as mechanical sensor (strain sensor, pressure sensor), thermal sensor, humidity sensor, electrochemical sensor, etc.[ 17 ] They can perceive and convert various mechanical motions, temperature/humidity changes, metabolite, and various bio/chemical inputs into electricity signals, detecting the actuation displacement/force, human motions, and environmental conditions, enabling precise feedback‐controls for actuators/robots. Besides, the fiber/fabric‐based sensors are also compatible for integration with human body and garments for wearable applications, bridging the connections between soft robots and human body, rendering more‐friendly and effective human–robot interactions and internet of things.
Among the external stimuli, electricity shows more potential in controlling the robots or power the sensors, capable of driving most of the robotic components to realize highly‐integrated smart systems. Simultaneously, fibers/fabrics with rational designs could be also applied as power sources, harvesting and storing energy from human body or environment.[ 18 , 19 , 20 , 21 , 22 , 23 , 24 ] In recent years, increasing efforts are dedicated to develop power‐fibers/fabrics for self‐powered wearables and intelligent robotic systems. It has been proven that thermal energy, mechanical energy, water energy, solar irradiance energy, etc., can be harvested and stored individually or simultaneously by fibers/yarns or fabrics/textiles‐based devices, such as thermoelectric generator, piezo‐/triboelectric nanogenerators, and solar cells.[ 25 , 26 , 27 ] These devices can power traditional devices, or serve as self‐powered sensors and functional components, enabling seamless integrations with actuators and sensors to simplify the robotic fiber/fabric systems, which are especially effective for wearables power sources or sensors to bridge the connections for more‐friendly human–robot interactions. In addition, efforts were also made to integrate other functions such as color changing and data storage/processing for applications of fibers/fabrics in camouflage, displays, memories, artificial synapses and information communications, assisting to construct more intelligent interfaces for robots–environments and human–machines.[ 28 , 29 , 30 , 31 , 32 , 33 , 34 , 35 , 36 ]
Herein, we summarize the progress of fibers/yarns and fabrics/textiles for soft robots, wearables, and human–robot interface. First, mechanisms of fiber/fabric‐based actuators responding to various stimuli were introduced, the latest achievements of each kind of actuators were reviewed with classifications to figure out the device designs and working processes. Combining various responsive mechanisms, we summarize the types of artificial muscles assembled by fibers and yarns, presenting attractive functions for soft‐robots manipulation, human motions, and the disabled assistance, furthermore, we show the smart responsive clothes for human perception and smart actuation. Secondly, we summarize the fiber/fabric‐based wearable sensors for detection of mechanical motions, temperature, humidity, metabolite, etc., and power fibers/fabrics to harvest energy from human body heat, human motions, and environments. The configurations, fabrications, mechanisms and functions of the sensors are covered, presenting their capability and integrability to build the multiple‐responsive platforms for human–robot interfaces with self‐powered potential. In addition, we introduce the integration concerns and routes between electronics with fabrics/textiles and human skin. We show the potential of emerging fiber‐robots for biomedical applications in vivo. Lastly, we propose a relationship map of robotic/wearable fibers/fabrics with the external stimuli from environments or human body. We expect that while some of the challenges may persist, several possible solutions are outlined to tackle the shortcomings, presenting an outlook for development of the fiber/fabric‐based soft robots and wearables in the new era.
2. Fiber/Fabric‐Based Actuators
2.1. Mechanisms of the Fiber Actuators
The emerging fiber actuators, which are inspired by biological muscles, have attracted a lot of interest. Unlike traditional mechanical motors, the 1D fibers are intrinsically simple, flexible, and anisotropic.[ 37 ] Moreover, the fibers can be twisted, sewed, weaved and knitted into 3D or 2D configurations through the mature textile processing, forming yarns or fabrics/textiles with complex structures and functions. The fiber/yarn actuators can perform rotation, elongation, and bending motion with tunable strain and stroke, showing intriguing application potentials in robotics and wearable devices.[ 38 , 39 , 40 ]
Fibers are the constitutional units of yarns and fabrics, the actuations of the fibers are mainly due to the change in the properties of the constituting materials when the environmental conditions change such as electricity, light, temperature, solvent, and vapor. The principles of fiber/yarn actuations can be classified into three mechanisms, 1) change of order of the molecule chains, 2) change of volume of the fibers, and 3) change of distance between the twisted fibers (Figure 2a).[ 15 , 41 , 42 , 43 , 44 , 45 , 46 ]
Figure 2.
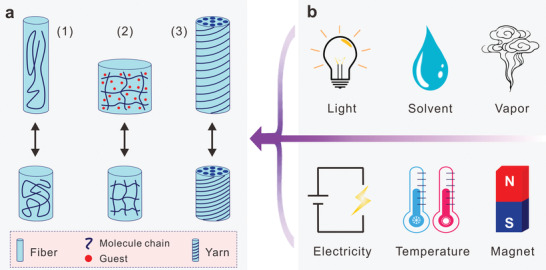
The actuation mechanisms and different stimuli for fiber/yarn actuators. a) Three kinds of reversible deformation principles. 1) Order change, 2) volume change, and 3) distance change. b) The actuation stimuli. The purple arrow indicates the infliction of stimuli on the fiber/yarn actuators.
The order change of fiber molecule chains is usually actuated by electricity, light and thermal, which in principle does not involve mass exchange and volume changes.[ 47 ] For example, shape memory polymers and alloys perform reconfiguration upon thermal stimulus due to internal molecular chains rearrangements and crystal/molecular structural changes. At higher temperature, the shape memory materials that fixed at temporary configurations will restore its original shapes because of the relaxation and reordering of the lattices or molecular structures.[ 48 ] Besides, dielectric materials can be squeezed and deformed in the presence of an electric field due to the Coulomb forces induced electrostatic pressure, namely, electromechanical effect. When sandwiched by two electrodes with applied voltage, the piezoelectric materials[ 49 , 50 ] and dielectric elastomers[ 51 , 52 , 53 , 54 ] contract and elongate along the field direction. In addition, liquid crystal elastomers undergo nematic‐to‐isotropic phase transition under multiple stimuli like thermal, light, and electric field.[ 55 , 56 , 57 ]
The second type of the fiber actuation is dominated by the volume change of the constitutional materials. Mass exchange between fibers and environment usually causes volume change, which results in the contraction or expansion in all direction. Charged species like electrons and ions were transported in and out of the porous and conductive fibers due to the electrical potential differences. Mediated by concentration differences (osmosis) or chemical affinity, even small molecules can be absorbed/desorbed from the fibers, causing swelling or shrinkage.[ 58 ] Besides, the variation of temperature also causes the volume change due to thermal expansion or phase transitions like melting and crystallization, which does not involve mass exchange.[ 59 ]
The distance change is specific to a yarn or thread that consists of a lot of fibers. The yarn/thread contracts and rotates because of the change of gaps between fibers. The gaps enlarge due to the guest's infiltration and thermal expansion. Moreover, the actuation can be achieved simply by passing current through it. Based on the Ampere's Law, there is electrostatic attraction or repulsion between every conductive fiber. When the distance changes of all the aligned fibers are added up and magnified, which generate both rotational and translational motions of the yarn, in sharp contrast to volume change‐based fibers.[ 45 , 60 , 61 , 62 , 63 ]
In brief, the mechanisms of the fiber actuators are mainly originated from the change of material properties, like the change of molecule order, sample volume, and fibers distance. The material property changes can be actuated by several stimuli. Each stimulus can cause different changes according to the fiber's material and geometry. In our daily life, the most common physical and chemical stimuli are mainly electricity, light, temperature, magnet, solvent, and vapor (Figure 2b). The fiber actuators absorb energy from these stimuli and respond to it. Compared to traditional electromagnetic motors and actuators, fiber actuators involve a variety of materials, energy sources, and configurations, which are promising in soft robotics and smart wearable systems.
2.2. Fiber Actuators Responses to Different Stimuli
Various stimuli from environments and human body are able to activate the fiber/fabric actuators, promising diverse interactions between human and robots. Here, the fiber/fabric actuators are classified into five categories according to the stimuli, which is application oriented. They are electric field, light, heat, solvent/vapor, and others (include pneumatic and magnetic).[ 64 , 65 ] The geometric design, working principle, performance, and application of devices under every stimulus are discussed, as well as their pros and cons are deliberated.
2.2.1. Electric Actuation
Electricity is the most commonly used energy, which is easily available and highly controllable. All the electrical parameters, like voltage, charge, and current can be precisely measured and controlled. Accordingly, scientists have developed different kinds of fiber actuators that rely on electricity. High voltage usually induces the order change of dielectric materials like liquid crystal, elastomers, and piezoelectric materials. When passing through current, conductive yarns can be actuated due to the distance change of twisted fibers by the current–magnetic or electrostatic force. In the case of electrochemical actuation, charges are intercalated into porous electrode, inducing the volume changes and strains that lead to actuation.
Piezoelectric materials could generate mechanical strain in response to an applied electrical field. Torsional rotation of the piezoelectric ceramic fiber was achieved by wounding a pair of parallel helical electrodes on their outer surface. When applying a high voltage of several thousand volts, the fiber easily generated precisely torsional displacement. Although the degree of rotation was very small, the working frequency of this fiber was as high as 10 kHz.[ 66 , 67 ] In addition to the rigid and brittle ceramics, there are flexible piezoelectric polymers such as polyvinylidene fluoride (PVDF), poly(vinylidene fluoride‐co‐trifluororethylene (PVDF‐TrFE), Nylon, polyurea, etc., which are easier to process and integrate. A multiple materials fiber with micro‐electromechanical systems (MEMS) was fabricated by the thermal drawing process (Figure 3a).[ 68 ] Piezoelectric polymer cantilever was integrated inside the fiber, which was deliberately placed off‐center. When voltage was applied on the cantilever, asymmetric strain will be generated in the fiber with transverse bending. Because the thickness was reduced, the actuation voltage can be reduced to 200 V, producing the displacement of ≈80 µm. Due to the high frequency and high stress, piezoelectric fibers can be used for color tuning, spectral filtering, microfluidic pumps. Especially, the high working frequency piezoelectric fibers can be used as ultrasonic sensors or actuators, and integrated into the ultrasonic imaging steerable catheter.[ 69 ] However, the high working voltage and small displacement are the most serious limitations.
Figure 3.
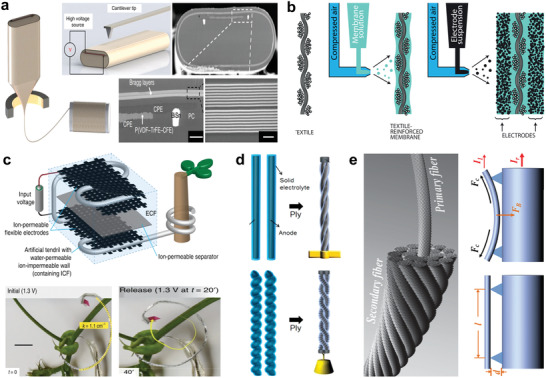
Electric actuated fibers/yarns. a) The thermally drawn fiber with piezoelectric PVDF. Reproduced under the terms of the CC‐BY Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/).[ 68 ] Copyright 2017, The Authors, published by Springer Nature. b) An ionic and capacitive laminate actuator. Reproduced with permission.[ 73 ] Copyright 2017, Elsevier. c) A tendril like osmosis actuator that reversibly changed stiffness and performed hooking/anchoring. Reproduced under the terms of the CC‐BY Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0).[ 79 ] Copyright 2019, The Authors, published by Springer Nature. d) All‐solid‐state actuator consisting of twisted CNTs fiber that infiltrated with solid electrolyte. Reproduced with permission.[ 80 ] Copyright 201, American Chemical Society. e) Current‐actuated hierarchal CNTs fiber. Reproduced with permission.[ 81 ] Copyright 2014, Wiley‐VCH.
Electroactive polymers (EAP) respond to electricity with fast response speed and significant displacement.[ 70 ] Plasticized PVC gel is a promising electroactive polymer, which manifests advantages of flexibility, large deformation, and high stability.[ 71 ] PVC gel based fiber actuator was reported, which consists of conductive PVC inner core and nonconductive PVC shell. Two identical fibers were loosely twisted together as a yarn actuator. When voltage was applied in the two fibers’ inner core, the two fibers attracted and got closer to each other, leading to the elongation of the yarn. Furthermore, the PVC fibers and common conductive wires were weaved into a textile. When applying a voltage, the deformed PVC fibers surrounded the anode wires, which generated about 27% contraction strain.[ 72 ]
The actuation of these piezoelectric and electroactive dielectric materials relies on the electrostatic pressure, which usually requires high voltage to form a strong local electric field. Soft electrochemically driven actuators that have a laminate structure similar to the electrical double‐layer capacitors work under relative low voltage. Kaasik et al. introduced an ionic and capacitive laminate (ICL) actuators based on the ionically conductive laminates. As shown in Figure 3b, a continuous scalable fabrication method of the ICLs actuator was developed. The glass fiber as reinforcement layer was spray coated with the electroactive membrane and the electrodes. The ICL actuator was driven by applying electrochemical potential of about 5 V. The electromechanical actuation is due to the electro‐osmotic relocation of mobile ions, so the actuator can also be used as a flexible energy‐storage unit.[ 73 ] Baughman et al. reported a carbon nanotubes (CNTs) twisted fiber actuator. Upon voltage application, electrons were injected into the CNTs fibers to generate electrochemical double‐layer in the presence of electrolyte, which caused the CNTs fibers to expand. The length of fibers changed with about 0.75 MPa stress generated by a voltage of 2 V, capable of deflecting a cantilever and changing the reflection of light. With absence of ion intercalation, the performances of the CNTs fiber actuators were largely enhanced in terms of life and rate, strain, and stress.[ 74 , 75 ]
Unlike animals that have muscles, plants like the Venus flytrap can perform reversible motions through osmotic hydrostatic pressure.[ 76 , 77 , 78 ] By imitating the plant's tendril, Must et al. presented a reversible osmotic actuation based on the ions osmosis (Figure 3c).[ 79 ] Upon applying a voltage, ions from the solvent can be adsorbed on the electrode surface and immobilized, which can be released back to the fluid bulk at a short‐circuited state. The electrosorption and desorption built up the osmotic pressure difference, inducing water loss and injection. The water exchange between the electrode and soft effector caused the stiffness change and actuation of the tendril‐like soft effector. When applying a voltage as low as 1.3 V, water was pumped into the soft effector, which gradually stiffen by about 5 folds and straightened from crimp state. In this way, the tendril performed the hooking and anchoring tasks just like the climbing plants. The bionic tendril actuator shows advantage to operate under very low voltage but achieved large displacement and stiffness modulation, the only shortcoming is that liquid electrolyte is required to be encapsulated.
To this end, solid‐state electrolyte has been developed to replace the liquid electrolyte. Lee et al. reported an all‐solid‐state fiber actuator that worked under low voltage with high energy efficiency (Figure 3d).[ 80 ] The helical yarns with twisted CNTs were infiltrated and covered with electrolyte, which insulated the CNTs from each other. Two identical yarns were plied together using an opposite twist direction to act as anode and cathode. When applying a voltage, the yarns produced torsional stroke and tensile contraction because of the charge intercalation. Because the yarns were insulated from each other like a capacitor, it is able to maintain the stroke even after the voltage was removed.
In addition to volume change by charges intercalation, the conductive yarns can be also directly actuated by passing through current to change the fibers distance. The yarns are actuated by the Coulomb force depending on the current density based on the Ampere's law. When the electric current passed through the helically aligned CNTs, the CNTs exerted electromagnetic field. The electromagnetic interaction between these CNTs resulted in the simultaneous lengthwise contraction and rotary torsion. Peng et al. investigated the principle, performance, and applications of these electromechanical yarn actuators in detail. The yarn actuators could work under all available environment media such as air or solvent and produced large stress when passing through a low current. But these current responsive yarns require continuous energy consumption to maintain the deformed state (Figure 3e).[ 63 , 81 , 82 ]
The electric actuation is fast and highly controllable, high diversity of actuators can be realized accordingly, including voltage‐based actuator, charge intercalation actuator, current‐based electromagnetic actuator. More importantly, fibers/fabrics actuated by electricity could be easily integrated with other electronic devices or textile substrate to form a highly operable system, exhibiting excellent potential for robots or smart wearable platforms.
2.2.2. Light Actuation
Sunlight is the ultimate energy source, which is omnipresence and ubiquitous. Light responsive fiber actuators are promising due to its advantages of remote and contactless controllability, precise positioning and wide range of frequencies. The light actuated fibers (not photo‐thermal effect) usually originate from molecular order change, for example, the change of optical chirality, amphiphilicity, conformation and conjugation.[ 46 , 83 ]
Liquid crystals (LCs) are the most common photoresponsive materials, with the merits of rapid and reversible deformation. The actuation principle is based on the light‐induced molecular realignment of the polymer network.[ 84 ] Xu et al. illustrated a hollow fiber actuator for liquid manipulation based on the photodeformation effect of the LC (Figure 4a).[ 85 ] The hollow fiber actuator possessed a bilayer structure, the EVA tube as a flexible substrate covered by a layer of LC on the inner surface. The hollow fiber was filled with various liquid slugs, which could be propelled by light. When illuminance was applied, the LC molecules were reoriented, the molecules deformation induced capillary force change to propel movement of the liquid slugs. Experiments showed that the liquid slugs were propelled in the preset direction and even crawled up an incline with a speed of 0.4 mm s−1. The performance of micropump was enhanced by connecting several in series and parallels. Owning to the flexibility, the fiber micropumps can be customized into different structures like spiral and loop. Moreover, the fiber actuator shows excellent reliability because of its photoinduced self‐healing property, exhibiting potential applications in wearable and implantable integrated microfluidic systems.
Figure 4.
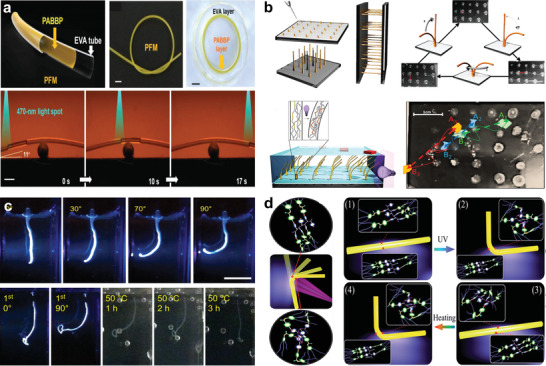
Light‐responsive fibers/yarns. a) LC coated hollow fiber for liquid manipulating by light induced capillary force change. Reproduced with permission.[ 85 ] Copyright 2019, Wiley‐VCH. b) LC fibers array controlled by space resolution light, working collectively to display patterns and transport objects. Reproduced with permission.[ 87 ] Copyright 2016, The Authors, published by Wiley‐VCH. c) Fiber actuator fabricated by hierarchical self‐assembly of supramolecular motors. Reproduced with permission.[ 91 ] Copyright 2008, Springer Nature. d) Photodeformable fiber for actuation and information encryption. Reproduced with permission.[ 92 ] Copyright 2019, Royal Society of Chemistry.
Aligned liquid crystal fiber was phototropic and can bend toward light. The fiber was simply fabricated by dipping and quickly pulling out from the precursor mixtures. The bending direction of the fiber in 3D space can be precisely controlled by the light. The LC fiber took only about 3 s to bend from 0° to 90° and generated a stress of ≈210 kPa. The deformed fiber returned to its original shape under the irradiation of visible light within 9 s, showing fast response and good reversibility.[ 86 ]
An array of slender parallel LC fibers was also fabricated by the dipping and pulling process by Gelebart et al. The dimension and position of the LC fibers can be accurately controlled through tuning the solution viscosity and droplet dimensions (Figure 4b).[ 87 ] The fibers were bent toward the light when exposed to UV light. When changed the incident angle of the light source, the tips of the fibers followed the movement and kept pointing to the light source. Moreover, the motion of every fiber in the array can be independently controlled. The fibers were bent to display a patterned by a space resolution light source. When immersing in paraffin oil, the fibers demonstrated better performance and could transport small objects that floating on it by regular oscillation. In addition to the molecular orientation rearrangement, a light‐driven rotary molecular motor was reported.[ 88 ] But it is very challenging to achieve macroscopic deformation by harnessing molecular motors’ rotation, which needs to precisely control the rotations of all molecules in space and time to achieve concerted manipulations.[ 89 , 90 ]
Inspired from the nature of the stimuli‐responsive system that are capable of converting molecular motion into macroscopic movement, Chen et al. developed an artificial muscle by the hierarchical self‐assembly of supramolecular motors (Figure 4c).[ 91 ] The molecules were modified with groups as designed to gain the photo‐responsive and amphiphilic properties. The rotations of the aligned molecular motors were accumulated, amplified and propagated to provide macroscopic motion. Irradiated with UV light, the artificial muscle string bent toward the light and lifted a piece of paper, both in air and when immersed in CaCl2 aqueous solution. However, the repeatability of the actuators was very poor. It took several hours for the string to recover the original conformation by being heated at 50 °C in the dark. It only could bend to 45° at the second round of photoirradiation. It suggests the possibility to design the artificial muscle by self‐assembly in molecular level.
Liao et al. reported a series of hydrogen‐bonded polymer fibers, which showed excellent photoinduced deformation ability in terms of both bending speed and bending angle (Figure 4d).[ 92 ] The cyanostilbene‐based polymers were used as photodeformable materials, which underwent an order–disorder phase transition when irradiated by UV light. The fiber bent toward the light with a high speed of 11.25° s−1 and a stroke of above 130°. Furthermore, by precisely controlling the incident directions of the lights and spot locations on the fiber, the fiber bent into 3D appearances such as a box. The deformation of the fiber could be eliminated via external stretching force and deformed again, showing good reversibility. More excitingly, the fiber displays reconfigurable shape memory effect, which could be shaped by UV light and recovered via‐heating. For example, fibers were deformed into the shape of letters by shining light on specific sites. Even when the letters were straightened by an external force, the fibers also could recover to the shape of the letters by heating. This process enables information writing, encryption and reading in fibers by light, mechanical force and heat, respectively, providing a new level of information security by fiber actuators.
The light‐responsive fiber is possible to form an automatic closed‐loop system. Because when the fiber is deformed at the light spot, the deformation in return changes the location of the light spot, leading to fiber deformation again. Self‐regulated actuation and self‐oscillation have been demonstrated based on this property.[ 93 ] However, the performances of the light‐responsive fibers need to be improved, especially the actuation speed, stress and reversibility. The straight‐line propagation of the light limits the application in unstructured places.
2.2.3. Thermal Actuation
Thermal property is one of the most important parameters of the materials, which relates to the reordering, expansion, melting, decomposition. Thermally actuated fibers are mainly based on order changes of molecule chains, like glass transition and volume changes along with expansion and melting. It has wide applications in temperature sensing and regulation, as well as waste heat recovery. Moreover, the thermal‐responsive fibers can be actuated by electrical Joule heating and photothermal effect, showing the advantages of both electric actuation and light actuation, such as highly controllable and remotely operable actuation.[ 94 , 95 ]
Temperature triggered shape memory materials are based on the glass transition of the switching segments. The deformable shape memory materials can temporally change the bulky and complex structure into small simple pieces for the convenience of transportation or implantation.[ 96 ] Lendlein et al. developed a biodegradable shape memory polymer (SMP) for minimally invasive surgical (Figure 5a).[ 97 ] The biodegradability was achieved by introducing the hydrolysable ester bonds into the thermoplastic polymer. Under physiological conditions, the polymers continuously cleaved and linearly lost mass. A smart surgical suture line was demonstrated from the biodegradable SMP, with important applications in endoscopic surgery where manipulating the suture line is difficult and time consuming.
Figure 5.
Thermally actuated fibers/yarns. a) Biodegradable SMP for minimally invasive surgical as smart suture. Reproduced with permission.[ 97 ] Copyright 2002, The American Association for the Advancement of Science (AAAS). b) Twisted SMP fiber actuator with high strain and stress and application in propeller engine. Reproduced with permission.[ 98 ] Copyright 2019, The Authors, published by The American Association for the Advancement of Science (AAAS). c) Janus structured actuator made of two ordinary materials with different thermal properties. A tripod walking robot was demonstrated. Reproduced with permission.[ 101 ] Copyright 2016, American Chemical Society. d) Twisted and coiled polymer fiber actuator from fishing line and sewing thread. Reproduced with permission.[ 105 ] Copyright 2014, The American Association for the Advancement of Science (AAAS). e) Twisted CNTs yarn infiltrated with viscous guest, showing fast and accurate controlling. Reproduced with permission.[ 109 ] Copyright 2014, Springer Nature.
However, the application of SMP is limited by the small stroke, low stress and low speed. Elastic energy was additionally stored into the SMP to overcome the challenges by Yuan et al. (Figure 5b).[ 98 ] The SMP fibers were isobarically twisted at higher temperature and then cooled down to fix the torsional structure. Once the SMP fibers were heated to the glass transition temperature, it will be untwisted to recover to the original straight shape. Higher energy and faster rotation can be achieved by twisting the fibers with greater torque. Furthermore, the trigger temperature was tunable at a wide range, so the SMP fibers can be customized and programmed to release stroke under predefined temperature for special application. As a demonstration, the SPM fibers were served as an engine to drive the propeller of a boat. Upon heating, the SMP fibers untwisted and propelled the boat to cruise 1 m in only 7 s. The limitation is obvious that the fibers only produces a one‐time stroke and need to be twisted again every time. Reversible torsional actuation of the SMP fibers was realized by combine two SMP crosslinked polymer with a different melting temperature range, producing a two‐way fiber actuator.[ 99 ] At a certain temperature, one component fixed the twisted structure while another melted to provide actuation, and vice versa. By repeatedly changing the temperature between 10 and 70 °C, the SMP fibers repeated the forward and reverse rotations.[ 99 ] Besides, Nafion fiber was reported to have multiple shape memory at a series of temperatures, but controllable reversibility of the multiple shape memory is low and complicated, more efforts should be deserved.[ 100 ]
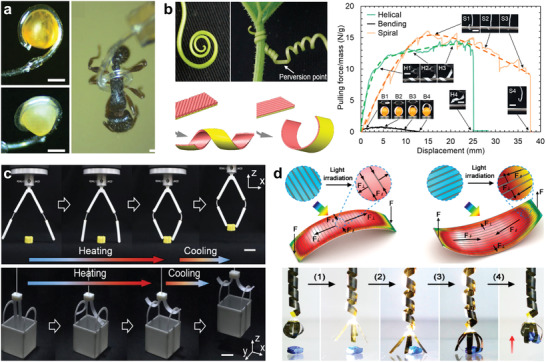
Besides the crosslinked SMP, shape memory and reversible actuation were achieved through a bilayer structure constructed with two materials of different thermal properties. Ionov et al. designed a fiber that comprised of two polymers in side by side as Janus structure. The fiber was made by dual extruder 3D print or melt spinning of two common printing filaments, like fusible polycaprolactone (PCL), and acrylonitrile butadiene styrene (ABS) or polylactide (PLA) (Figure 5c).[ 101 ] When cooling down, the ABS or PLA crystallized and contracted, leading to the Janus structure bending toward these materials. At high temperature, the Janus structure recovered its original shape because the ABS or PLA melt and the nonfusible component PCL released the stress. Accordingly, a self‐walking tripod robot assembled by the Janus fibers with different thicknesses (two 0.4 mm and one 1 mm) was demonstrated, which moves in one direction because of the structural asymmetry. When heated to 70 °C, the thicker fiber kept still but the two thin fibers moved toward it. When cooled to 22 °C, all three fibers outspread with the same amplitude. In this way, the tripod moved away from the glass bottle step by step. The Janus fiber actuator was different from the bilayer metal or bilayer hydrogel actuators because it undergoes melting and crystallizing processes, it takes advantages of the simple and economical processing, with robust, fast, and reversible actuation.
A novel fiber actuator based on coiled fishing line has received great attention because of its extremely low cost but high performance. The commercially available polyethylene or nylon fibers are the most often used precursors.[ 102 , 103 ] The polymer chains inside the fiber are highly oriented alongside the length. Upon heating, the fiber provides large reversible thermal contraction in length and expansion in radial direction. The thermal actuation process is linearly related to temperature and shows little hysteresis, which is more controllable than SMP.[ 104 ] The actuation speed, strain and stress are largely amplified by twisting and coiling the fibers. The coiled fiber muscle contracts with high speed and stress by switching between cold and hot water bath, which provides active cooling and uniform heating. In addition, Haines et al. reported a twisted polymer fiber actuator based on fishing line and sewing thread (Figure 5d).[ 105 ] The fiber actuators can be woven into a smart textile, which contained twelve coiled fibers in parallel and silver‐plated fibers as heaters. The textile could lift a 3 kg object. Accordingly, the fibers were braided into a sleeve. When the temperature rose, the fibers contracted, delivering a 20.6% change in pore area and 16.4% stroke of the sleeve. These sewed threads‐based textile actuators have important applications in smart clothing and wearable robot/prosthesis, but the actuating temperature is too hot for wearing (95 °C) and the cooling process is too slow.
Low temperature actuation is realized by infiltrating guests into the gaps of the twisted nanofibers yarn. The volumetric thermal expansion of the guests changes the distances between nanofibers, and then deforms the yarns. The guests are usually low temperature melting materials like wax or liquid metal. The wax melts at ≈40 °C and provides a 30% volume expansion, which drives the host yarn to untwist and provide contractive and torsional actuation. The liquid wax will be confined in the gaps of the yarn even without package due to the interfacial energy. Upon cooling, the wax solidifies and shrinks back to the original volume, bringing the yarn to restore the twisted structure. The actuation that relied on the wax melting shows high cycle life, high energy and power densities.[ 106 ] Besides, the guest also can be filled into a hollow microtube to achieve actuation[ 59 ] and stiffness change.[ 107 , 108 ]
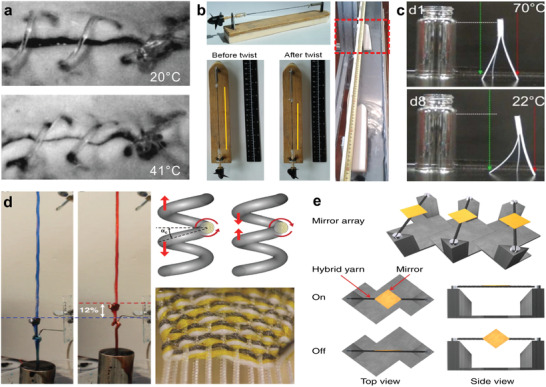
The infiltrated guests play a key role in the dynamic torsional actuation of the yarn. Chun et al. investigated the dynamic properties of the yarn infiltrated with mixtures of wax and polystyrene–poly(ethylene–butylene)–polystyrene (SEBS) copolymer (Figure 5e).[ 109 ] The resultant yarn with large viscosity had an overdamped dynamic response and minimum dynamic oscillations, which was of importance to realize fast and accurate control. As an example, the yarns were used to control the mirrors of an optical switch. The mirrors were attached to the yarn and rotated concurrently. Controlled by Joule heating, the mirrors rotated from horizontal to vertical in 0.13 s without oscillatory. These fast and accurate controls of the mirrors can be used for image display or laser scanner with an acceptable refresh rate.
The limitation of the thermally actuated fiber is the low cycling rate due to the poor heat diffusion/dissipation, especially during the slow cooling process. Besides, the high working temperatures usually influence the thermal stability of materials, causing the possible discomfort and injuries for human, thus limited demonstrations were achieved for wearable applications.
2.2.4. Solvent and Vapor Actuation
In addition to thermal expansion of the infiltrated guest, porous fibers made of hygroscopic materials are actuated by adsorbed and desorbed guests like solvents or vapors. The fibers are deformed because of the mass exchange induced volume change, like swelling and shrinkage as the small molecular species are transported in and out.[ 110 , 111 , 112 ]
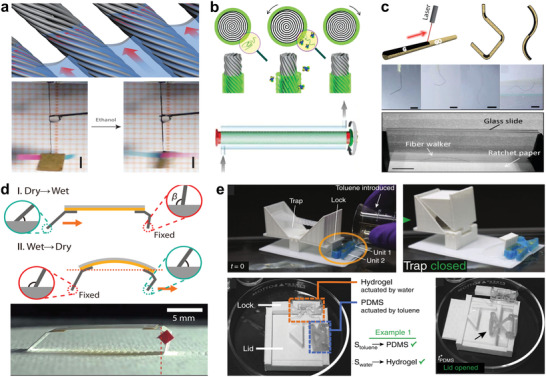
Chen et al. and Deng et al. showed that CNTs fiber responded to solvent and vapor with high speed and stroke (Figure 6a).[ 113 , 114 ] In contrast to the electric current induced distance change and infiltrated guests’ thermal expansion, the CNTs fiber actuator here emphasized the mass transport. The CNTs were twisted and coiled into a helical fiber with hierarchical structure, which contained a lot of nanoscale and microscale gaps. The fiber strongly imbibed the solvent and vapor due to the hydrophilic property and capillary force, the guests’ infiltration in the gaps would enlarge the distance between the CNTs and lead to both contractive and rotational actuation of the fiber. The CNTs fiber rapidly contracted ≈15% in 45 ms upon contact with solvent. The actuation was reversed when the solvent and vapor were removed from the fiber due to the gaps narrowed down. The optimized fiber generated contractive stress of 1.5 MPa and rotary speed of 2050 rpm. By the virtue of such high performance, the fibers were used for humidity energy harvesting. A copper coil was connected to the fibers and placed in a magnetic field. The fibers rotated when sprayed with ethanol, which drove the generator output an alternating current of 0.11 mA. Besides, the fibers were strong and flexible enough to be woven into a smart textile. Upon spraying with ethanol, the smart textile can lift a 240 mg ball up 4.5 mm. The actuation process of the fiber was tunable and programmable by changing the fiber materials, helical structures and solvents. The fiber actuator promises for artificial muscles and self‐powered sensors.
Figure 6.
Solvent and vapor actuated fibers/yarns. a) Hierarchically arranged helical CNTs fiber actuators driven by solvents and vapors. Reproduced with permission.[ 113 ] Copyright 2014, Springer Nature. b) Sheath‐run artificial muscle composed of PEO–SO3 guest and a CNTs yarn host. Reproduced with permission.[ 115 ] Copyright 2019, The Authors, published by The American Association for the Advancement of Science (AAAS). c) Laser patterned GO–G fiber actuator and robot. Reproduced with permission.[ 118 ] Copyright 2013, Wiley‐VCH. d) Aligned nanofibers based self‐locomotive hygrobot. Reproduced with permission.[ 121 ] Copyright 2019, The Authors, published by The American Association for the Advancement of Science (AAAS). e) A smart flytrap automatic respond to multiple solvents with embodied logic. Reproduced under the terms of the CC‐BY Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0/).[ 122 ] Copyright 2019, The Authors, published by Springer Nature.
However, the CNTs fiber used a large number of expensive CNTs and the CNTs in the inner core are not functioning, which is not economical. Therefore, a sheath‐run artificial muscle (SRAM) was reported with higher performance and cost effectiveness by Mu et al. (Figure 6b).[ 115 ] The core of the fiber was made of twisted and coiled CNTs yarn, which was replaceable by common commercial yarns like nylon 6 and silk to reduce the cost. The CNTs yarn was covered by a layer of sheath by drawing through the polymer solution. SRAM was achieved by further twisting and coiling the fiber. The sheath of the fiber swells and softens by absorbing ethanol vapor, leading to the untwisting of the core yarn. The actuation was reversed when the vapor was removed, which can be repeated for thousands of cycles. The SRAM generated linearly tensile stroke in response to the guest concentration, which can be used as a sensor. Owing to the response to certain solvent at fix concentration, the SRAM promises for automatic drug release at the lesion site. The SRAMs were woven into a comfort‐adjusting textile, capable of tuning its porosity in response to water, humidity and sweat for improving the human feeling and perception. To improve the wettability of the CNTs yarn to get larger responses to water, modifications such as oxygen plasma treatment and blending with the hydrophilic graphene oxide were demonstrated.[ 116 , 117 ]
The hydrophilicity of GO is attributed to the abundant oxygen containing functional groups, which can be reduced into hydrophobic graphene (G) by laser beam irradiation. A GO/G fiber actuator with sophisticated and well‐confined motion was reported by Cheng et al. (Figure 6c).[ 118 ] By rational designed and positioned laser reduction, some parts of the GO fiber were reduced to G, forming the predefined GO–G patterns. Once exposed to moisture or water, the hygroscopic GO regions swelled and expanded because of water infiltration while the G regions kept unchanged. In this way, the GO–G fiber deformed into a specific shape, which was reversed by the desorption of water. The fiber actuation was programmable by the arrangement of GO–G patterns. Through changing the parameters of the responsive GO regions, such as dimensions, positions and angle, the GO/G fibers can deform into different shapes including hook, spring and letters. Owing to the reversible and programmable properties, a single GO/G fiber was customized into a walking robot. The robot navigated through a narrow‐slit step by step when humidity periodically changed. The GO/G fibers were further woven into a network and a fabric, demonstrating the applications in smart cloth and smart window that respond to weather with adjustable configurations.
The asymmetric bilayer structure is an effective strategy to realize actuation.[ 119 , 120 ] Shin et al. developed a water responsive actuator by combining two common materials poly(ethylene oxide) (PEO) and polyimide (PI) (Figure 6d).[ 121 ] The active layer was based on the aligned PEO nanofibers layer produced by directional electrospinning. The aligned nanofibers limited the expansion along the fiber's length direction while enhanced the swelling in the perpendicular direction. The aligned fibers demonstrated a faster and stronger response, which was proved by both experiment and theory. A hygrobot was constructed by the bilayer actuators. The legs of the hygrobot were designed into asymmetry configuration. The hygrobot moved in a single direction by reversible bending of the actuator under periodic humidity change. Besides, the hygrobot automatically and continually crawled through a place where existed vertical humidity gradient, by periodically bending upward (low humidity) and downward (high humidity). This self‐sustaining automatic robot designed by asymmetric structure and materials shows the possible application for cleaning wet surface or sanitizing skin.
More complex and logical actuations are desirable, which can be achieved simply through the composition and structural organization. Jiang et al. reported an actuator system that automatically responded to multiple stimuli with embedded logic (Figure 6e).[ 122 ] The bistable and anisotropic structures were printed by direct ink writing. Two materials that respond to different stimuli were used, a PDMS‐aligned glass fibers composition (respond to nonpolar solvents) and a hydrogel‐aligned cellulose fibers composition (respond to water). The response time was tunable by changing the thickness of the structure. As a demonstration, a Venus flytrap like box was designed. The box had two locks that were controlled by two actuators. Upon nonpolar solvent, the flytrap was unlocked by the first actuator and able to close if a mass is placed on it, while the second actuator was designed to relock it after 10 s delay when the flytrap will not respond to the mass. In addition, a smart box was designed and printed, who had a lock that responds to water and a lid that responds to toluene. Only when the box encountered with both water and toluene, the box opened the lock and the lid to release the objects inside.
Fibers actuators that respond to solvent and vapor have wide applications, because water covers 70% of the Earth's surface and makes up 70% of human beings. It can be used to sense the humidity and harvesting energy from stream, rain, ocean wave, achieving self‐powered platform and self‐regulating actuation system, especially at the harsh conditions. In addition, it is implantable for body fluid sensing and drug release controlling, showing great potential as fiber robots for biomedical diagnosis and therapy in vivo.[ 123 ]
2.2.5. Magnetic and Pneumatic Actuations
Apart from the aforementioned stimuli‐responsive actuators, there are two kinds of actuation that play a key role in soft robotics, magnetic and pneumatic actuation. The pneumatic soft actuator consists of a series of elastomer chambers and is deformed by pressurized fluid expanding the chambers. Fibers and fabrics which could limit the expansion of the chambers, are widely used to program the deformation process of the pneumatic actuators.[ 124 , 125 ] Fibers composed of magnetic materials are actuated in response to the external magnetic field. The magnetic fiber actuators play an important role in untethered robot, because they take advantages of fast, dexterous, large force, and offers high compliance.[ 126 , 127 , 128 ]
To produce the magnetic fibers, several methods are developed, such as coating,[ 129 ] electrospinning,[ 130 ] and 3D printing of the magnetic microparticles–polymers composition. Lee at al. reported a remotely driven torsional magnetic fiber actuator that could be operated at any temperature and in any environment.[ 131 ] Kim et al. reported a direct ink writing system to extrude silicone‐magnetic particles composite fiber (Figure 7a).[ 132 ] The magnetic domains of the fiber can be tuned by the printing direction and applied field direction. A printed filament that with patterned magnetic domains changed its shape very quickly in response to the external magnetic field. Different kinds of planar structures were printed with specific designed ferromagnetic domains. Under the magnetic field, the planar structure bent and folded into complex 3D shapes by the magnetic forces according to the origami design. Furthermore, 3D structured magnetic metamaterials were printed. The metamaterials were designed to have negative Poisson's ratio, which shrunk in both length and width in magnetic field. Applications such as picking robot and jumping robot were demonstrated.
Figure 7.

Magnetic and pneumatic actuators. a) 3D printed fiber actuator with patterned magnetic polarity. Reproduced with permission.[ 132 ] Copyright 2018, Springer Nature. b) 3D printed programmable pneumatic actuator. Reproduced under the terms of the CC‐BY Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0/).[ 134 ] Copyright 2018, The Authors, published by Springer Nature. c) 3D printed reprogrammable pneumatic actuator. Reproduced under the terms of the CC‐BY Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0/).[ 135 ] Copyright 2019, The Authors, published by Springer Nature.
Fibers architecture of many animals and plants serves to passively restrict the expansion of local elastic matrix to achieve programmable motion. The fibers reduce the active components and simplify the control strategy. Inspired by elephant trunk and octopus, pneumatic soft actuators are developed by embedding fibers to define the morphological information.[ 133 ] A multimaterials 3D printing platform was developed by Schaffner et al. to directly print both the elastic expansion matrix and the strain limiting fibers with precisely preprogrammed architectures (Figure 7b).[ 134 ] Altering the arrangement of fibers, the actuators were regulated to perform bending, elongation, contraction, or twisting and more complex motion. The 3D printed actuator could generate a large strain to support a load of 500 g. Furthermore, there were no pressure instabilities in the actuator because of the structured topology and stress–strain characteristics of materials. Through elaborate design and digital fabrication, the programmed pneumatic soft robotic is close to the practical application.
However, the printed pneumatic soft robot is predefined to certain motion permanently. Reprogrammable versatile robotics are more attractive. Kim et al. reported a reprogrammable pneumatic soft robot based on the self‐adhesive fiber‐constrained unidirectional prepreg (Figure 7c).[ 135 ] The motion of the pneumatic soft robot was governed by the prepreg, which can be easily detached and reattached to another one to reconfigure inflation trajectories. Multiple prepregs were stacked up to achieve combined movements. By attaching the prepregs, an ordinary balloon was programmed to perform bending, twisting and wrapping motions. Particularly, a versatile gripper and a rolling robot were demonstrated.
In summary, the fiber actuators consisted of various materials are tabulated in Table 1 . The fiber actuators take advantages of being simple, light, actively stimuli‐responsive, with high specific power and high efficiency. Especially the CNT fiber can be actuated by several kinds of stimuli and has excellent performance in terms of strain, stress, reversibility and cycle life. By comparison, nylon thread actuators are extremely cost effective but have decent performance Fiber actuators can be produced by the well‐established textile engineering techniques such as melt extrusion, wet spinning, microfluidic spinning, cold/thermal drawing, electrospinning, or depositing/coating process. The fiber/yarn actuators are highly cost‐effective with spatially advantageous, enabling flexible operation with complicated motions like a muscle in the limited spaces. Under external stimuli, fibers/fabrics perform the bending, contraction or twisting to manipulate the objects such as lift and pull. Efforts should be made to improve the mechanical performance of fibers/yarns, including improvement of the actuation displacement and actuation force, enabling fast responses and feedback‐controls. To this end, different strategies have developed, for example, twisting a bundle of many individual fibers together into a single aggregate yarn, coiling hierarchical helical bundle. This assembled thread with increased surface area to volume ratio could have higher sensitive responses to the external stimuli such as light, heat, solvent, vapor, magnetite, etc., delivering faster actuation with higher actuation force. In addition, customizable and programable actuation is one of the most favorable strategy. Composites that respond to different stimuli are spatially patterned to perform predefined actuation with embedded logic, showing mechanical intelligence.
Table 1.
Performances of fiber/fabric‐based actuators enabled by different materials
| Stimulus | Material and geometry | Principle | Stress | Strain | Time | Frequency [Hz] | Work density | Cycle life | Rotate | Refs. |
|---|---|---|---|---|---|---|---|---|---|---|
| Electric (±500 V) | Piezo fiber | Order | – | 20 µm | – | 10 | – | – | 1.7°–2.5° | [ 66 , 67 ] |
| Electric (300 V) | PVDF fiber | Order | 2–4 kPa | 8%, 80 µm | – | 158.3 | – | – | – | [ 69 ] |
| Electric (600 V) | PVC gels fiber | Distance | 300 kPa | 53% | – | – | – | 180k | – | [ 72 ] |
| Electric (1.3 V) | Activated carbon fiber | Volume | – | – | 25 min | – | – | – | 500° | [ 79 ] |
| Electric (2 V) | PPy | Volume | 0.50 MPa | 0.075–3% | 250–510 s | 0.05 | – | 8k | – | [ 136 ] |
| Electric (5 V) | CNT fiber | Volume | 17.8 MPa | 1.3% | 0.95 s | 0.8 | – | 100 | 53° mm−1 | [ 80 ] |
| Electric (5 mA) | CNT fiber helix | Distance | 10 MPa | – | 0.4 s | 0.17 | – | 2.4k | 51° | [ 63 ] |
| Light (365 nm) | Molecular motor | Order | – | – | 60 s | – | – | – | 90° | [ 91 ] |
| Light (365 nm) | P4VP(Z‐TCS)x | Order | – | – | 8 s | – | – | – | 135° | [ 92 ] |
| Light (488 nm) | LC | Order | – | – | – | 0.5–90 | – | >50 min | – | [ 93 ] |
| Thermal (40 °C) | SMP fiber | Order | 1.6 N | 200% | 20 s | – | – | – | – | [ 97 ] |
| Thermal 80–140 °C | SMP fiber | Order | – | – | 2 s | – | 1.8–2.8 kJ kg−1 | – | 6123 turns m−1 | [ 98 ] |
| Thermal 4–65 °C | Janus filaments | Order | 0.8 MPa | 16–30% | 2–20 s | – | – | – | – | [ 101 ] |
| Thermal (240 °C) | Nylon PE | Order | 10–35 MPa | 50% | – | 1–5 | 27.1 kW kg−1 | 1.2 million | – | [ 105 ] |
| Thermal 160 °C | PET | Order | 368 MPa | 12.1% | 10 s | – | – | – | – | [ 104 ] |
| Thermal 83 °C | CNT wax | Distance | 5.7–16.4 MPa | 3–5.6% | 15–30 ms | 20 | 27.9 kW kg−1 | 1.4 million | 12.6° mm−1 | [ 106 ] |
| Thermal 150 °C | LCE/CNT | Order | 840 kPa | 12% | 5 s | – | 97 kJ m−3 | 100 | – | [ 94 ] |
| Thermal 40–90 °C | CNT wax SEBS | Distance | – | – | 0.13 s | 0.5 | – | 40k | 80° mm−1 | [ 109 ] |
| Solvent | CNT helix | Distance | ≈1.5 MPa | ≈15% | 45 ms | 26.7 J kg−1 | 50 | ≈41 turns | [ 113 ] | |
| Solvent | PEO–SO3 CNT | Distance | 42 MPa | 8.5% | 0.1–12 | 4.44 W g−1 | 3k | 143° mm−1 | [ 115 ] | |
| Solvent | GO/G fiber | Volume | 100 MPa | 5% | 10 s | – | – | 1k | 140° | [ 118 ] |
| Solvent | Silk fiber | Distance | 12.5 MPa | 47% | 67 s | – | 73 J kg−1 | 500 | 547° mm−1 | [ 137 ] |
| Solvent | Alginate fiber | Distance | 95 MPa | 13.8% | 12 s | – | 14.8 kW kg−1 | 400 | 400 turns | [ 138 ] |
| Magnet | NdFeB elastomer | – | – | 15–25% | 0.1–0.5 s | – | 309.3 kW m−3 | – | – | [ 132 ] |
| Magnet | NdFeB CNT | – | – | 0.3% | 0.67 s | – | 8.42 Nm kg−1 | 8k | 71.2° mm−1 | [ 131 ] |
| Pneumatic | Rubber | – | – | 23% | 4–13 s | – | – | – | 112° | [ 139 ] |
3. Fiber/Fabric‐Based Actuators for Artificial Muscle and Smart Clothing
The fiber actuators are similar to biological muscle in structure, function and performance, exhibiting potential applications in humanoid robotic and even for disabled patient rehabilitation. Furthermore, despite their apparent simplicity, actuating fibers allow very complex actuation behavior by being weaved and knitted into fabric/textile, representing a promising strategy to develop novel wearable devices for human–robot interaction.
3.1. Fiber‐Actuator‐Based Soft Grippers
Fiber actuator, attributed to its flexibility, is promising for the soft gripper. A fiber gripper can grasp and manipulate objects by the actuation of fiber, such as bending, elongating, stiffening. Compared to rigid grippers, a fiber gripper can grasp or manipulate a larger variety of objects with complex shapes and different softnesses due to its excellent mechanical compliance, allowing reduced operation complexity and higher safety.[ 140 , 141 ]
A tendril‐like gripper based on pneumatic microtube was developed by Paek et al. to handle delicate, soft, and fragile micro‐objects (Figure 8a).[ 142 ] The long and thin PDMS microtube was built by a direct‐peeling technique, which spiraled several turns when pressured. The microtentacle was able to grab and hold an egg of a fish and an ant by winding around them conformally. However, the 1D fiber may not easy to steadily hold the objects. To increase the stability, the gripper should have multiple fingers to balance the force and the fingers are preferred in ribbon shape to increase the contact area when catching objects. Wang et al. developed a preprogrammed gripper via 3D printing polymer filaments (polyester) on paper substrate to form a bilayer composite ribbon. The polymer filaments contracted in length direction when heated, causing the ribbon to perform bending, spiral, and helical distortions based on the different printed geometries. The tentacle‐type gripper with spiral and helical deformation could twin and grasp cylindrical objects with weight of ≈8.2 N, about 1557.7 times its weight. But this tendril‐like gripper needs a suitable host for twinning around and anchoring. To grasp a spherical object, a gripper with four self‐bending ribbons arranged in a cruciform shape was constructed to catch a ping‐pong ball by caging it. The actuation processes and the generated forces of the three types of grippers were compared in Figure 8b.[ 143 ] The authors also demonstrated a hinge‐like gripper that produced large angular deformation and large amount of force, as well as an outward bending gripper (Figure 8c).[ 144 ]
Figure 8.
Fiber actuator for soft gripper. a) A tendril like pneumatic gripper catching a fish egg and an ant. Reproduced under the terms of the CC‐BY Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0/).[ 142 ] Copyright 2015, Springer Nature. b) A variety of grippers constructed from the 3D printed tendril like actuators. Reproduced with permission.[ 143 ] Copyright 2018, American Chemical Society. c) Hinge‐like gripper and the outward bending gripper. Reproduced with permission.[ 144 ] Copyright 2019, Elsevier. d) A robotic arm with a telescope arm and a claw. Reproduced with permission.[ 145 ] Copyright 2016, American Chemical Society.
In addition, Deng et al. demonstrated a light‐manipulated robotic arm. The actuator was fabricated by covering a layer of aligned CNTs/paraffin wax composite on a polyimide substrate (Figure 8d).[ 145 ] The bending motion, arose from the thermal expansion of the paraffin wax, was highly tunable by the patterns of the CNTs and the illumination. A robotic arm was assembled, which consisted of one phototropic helix actuator as the telescope arm and four apheliotropic bending actuators as the claw. When applying photothermal heating, the claw released and the telescopic arm elongated to reach an object on the table. When the light was removed, the claw grasped and clenched the object, and then the telescopic arm contracted to lift the object up. CNT and GO are important materials in the fiber actuators, because of its multiple‐responsiveness and high‐performance actuation. Moreover, the CNT sponge‐based gripper which was actuated by both electrothermal and electrochemical effect has been reported.[ 146 ] And a GO fiber‐based claw like gripper, that was actuated by humidity, temperature and light, could pick up and release a foam block.[ 147 ]
Apart from direct actuation, fibers were utilized to enhance the catchability of gripper by increasing the friction and contact area, inspired from the fibrillar adhesives of gecko.[ 148 ] However, the fiber actuator is used not only as a gripper but also as means to fabricate the fabric robotic, leading to grasping, locomotion, morph control, and thus enable key functions of smart fabric. Shah et al. developed a morphing robot that consists of a common Spandex fabric stitched with multiple tendon actuators. The fabric robot was able to overcome obstacles during locomotion, and adapted environments to perform variable tasks.[ 149 ] Fiber‐based grippers are inherent lighter, simpler, and more universal, but the actuation force is small and the speed is low, urging the need to develop new advanced materials. Besides, sensors are indispensable for the interaction control, high integration of the different devices is pursuing.[ 150 ]
3.2. Artificial Muscle for Exoskeletons and Humanoid Robots
One of the most promising applications of fiber actuators is in artificial muscle. The fiber actuated exoskeletons and robotics are more flexible, adaptable and safe, and versatile to accomplish different complex tasks.[ 151 ] These features are extremely important in human–robot cooperation, such as the exoskeletons for assisting disabled and aged people, and high‐intensity workers.[ 136 ]
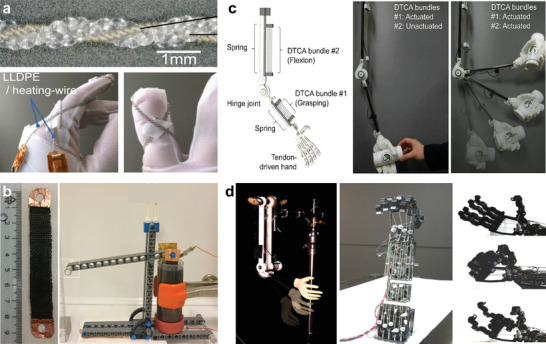
Harouka et al. reported a thermal responsive coiled fiber actuator for index finger movement assisting (Figure 9a).[ 152 ] The fiber actuator was made from low density polyethylene (PE), which operated at low temperature (60 °C) and generated higher stress and strain several times than skeletal muscle. The fiber was coated with conductive elastomer for Joule heating to improve heat transfer and actuation speed. Six fiber actuators were braided and attached to an index finger. When heated, the actuator pulled the index finger to bend about 3 mm. Due to the low actuating temperature, the fiber actuators could be integrated with daily fabrics/textiles to form power‐assisted clothes.
Figure 9.
Fiber actuator as artificial muscle for disabled human and humanoid robots. a) A low‐working‐temperature PE fiber actuator for human finger motion assisting. Reproduced under the terms of the CC‐BY Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0/).[ 152 ] Copyright 2016, The Authors, published by Springer Nature. b) Soft artificial muscles made by weaving and knitting with tunable force and strain. Reproduced with permission.[ 136 ] Copyright 2017, The Authors, published by American Association for the Advancement of Science (AAAS). Reprinted/adapted from ref. [ 136 ]. © The Authors, some rights reserved; exclusive licensee American Association for the Advancement of Science. Distributed under a Creative Commons Attribution NonCommercial License 4.0 (CC BY‐NC) http://creativecommons.org/licenses/by‐nc/4.0/. c) A robot limb actuated by double helix nylon and spandex fiber to perform finger grasping and elbow bending. Reproduced with permission.[ 156 ] Copyright 2018, Wiley‐VCH. d) Electro‐thermal‐mechanical model controlled robotic hand powered by super coiled nylon fiber. Reproduced with permission.[ 157 ] Copyright 2017, IEEE.
Choe et al. applied fiber actuators as artificial muscle for robotic fingers. The polyacrylonitrile (PAN) fibers contracted when exposed to the acid solution and expanded when exposed to basic solutions due to the mass exchange. The 3D printed fingers were driven to perform bending and unbending motions and generated 0.36 N force and 15 mm displacement at the tip.[ 153 ] Both stress and stroke are relatively small. Nevertheless, it is inconvenient to alternatively contact the PAN fibers with acid and basic solution. Maziz et al. demonstrated a polypyrrole coated cellulose‐based soft artificial muscle with tunable force and strain (Figure 9b). An assistive fabric with increased output force and amplified strain was constructed by knitting and weaving. The fabric actuator was used to move a LEGO lever arm, which generated 125 mN force and lifted a 2 g weight. By replacing the electrolyte with ionic liquid, the fabric actuator can operate in air or dry condition, allowing for wearable exoskeleton suit.[ 136 ]
Besides, fiber actuators were used to control an underactuated humanoid hand. The three finger joints were driven by two fiber actuators, which served as flexor and extensor artificial muscles. The bending and unbending motions of the fingers were achieved by heating agonist and antagonist actuators, respectively.[ 154 ] Thanks to the mechanical compliance of the fiber actuators, the underactuated humanoid hand could rapidly and firmly grasp different kinds of objects with diversity in size, shape, weight, and rigidity.[ 155 ] Spandex was reported to have a larger strain than Nylon. Kim et al. developed a new double helix fiber actuator by twisting and coiling nylon and spandex together (Figure 9c).[ 156 ] The double helical fiber actuators combined the advantages of the large strain spandex and the silver‐plated conductive nylon. The fiber showed fast actuation and good reversibility. Several fibers were connected in parallel to enhance the force, and then attached to fingers and elbow of a humanoid hand. When the fibers were actuated by Joule heating, the tendon‐driven fingers bent and grasped a bottle. The fibers were also proved to drive the forearm to extend and flex, showing wearable potential for human motion assistance.
For real application, the motion of the artificial muscle and limb needs to be accurately controlled. Controller model was developed for the twisted and coiled polymer fibers.[ 158 ] Yip et al. developed an electro‐thermal‐mechanical model to fast control the dynamics of the 3D printed robotic hand, which was actuated by super coiled nylon fiber actuators (Figure 9d).[ 157 ] Upon the Joule heating that was controlled by the model, both the force and displacement of the fiber actuator were regulated to the desired value within a very short time. Three fiber actuators were attached to the robot arm to act as bicep muscle. Based on the open‐loop lead‐compensated control, the robotic upper limb precisely bent to 90° flexion. It took only half a second for the fingers to fully bend and make a fist. Therefore, fiber actuator based artificial muscle has the potential to replace the traditional motors in robot and exoskeleton, achieving bionic functions. Before that, the limited stress, strain, human friendliness, and controllability need to be addressed.
3.3. Smart Clothes for Human Assistance and Augmentation
The fiber/yarn actuators can be conveniently sewed or weaved into textile using the mature textile engineering technologies, which are promising for wearable rehabilitation, human motion assistance and human power augmentation, as well as comfort adjustment and fashion ornament.
Tonazzini et al. developed a stiffness tunable fiber for finger rehabilitation. The fiber was made by filling the silicone rubber tubes with low‐melting‐point alloys (LMPA) (Figure 10a).[ 159 ] Upon Joule heating, the LMPA changed from solid to liquid quickly. The melting of the LMPA enabled the fiber to switch between high‐load‐bearing rigid state and deformable soft state. The fibers were assembled into an adaptive splint for finger rehabilitation, which provides adequate strength to immobilize the injured articulation at a stiff state. When applying heating, the fiber‐woven splint became soft and allows the finger to practice extension/flexion. The soft splint shows reconfigurable merit to be shaped into a new structure for other usages upon applying heating and cooling in sequence. Moreover, the fibers can be customized into smart fixtures with different stiffness and shapes by weaving or knitting, delivering breathable and comfortable tool for wearable rehabilitation of injured fingers. The fibers with tunable stiffness also exhibit the potential applications in adaptive seating and orthopedic corsets.
Figure 10.
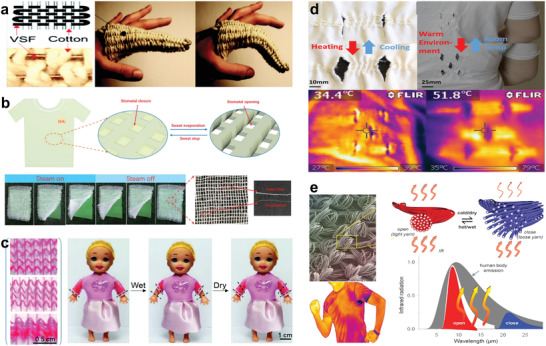
Smart clothes for human assistance and augmentation. a) Actuating fiber based smart splint for injured finger rehabilitation. Reproduced with permission.[ 159 ] Copyright 2016. The Authors, published by Wiley‐VCH. b) The breathable and fast‐dry clothes. Reproduced with permission.[ 138 ] Copyright 2018, Royal Society of Chemistry. c) A moisture‐responsive textile for breathable quick‐dry clothes. Reproduced with permission.[ 137 ] Copyright 2019, Wiley‐VCH. d) Thermal management clothes with functions of passive heat dissipation enhancement. Reproduced with permission.[ 160 ] Copyright 2019, American Chemical Society. e) A metatextile with smart and dynamically adaptive IR optical properties. Reproduced with permission.[ 167 ] Copyright 2019, The Authors, published by The American Association for the Advancement of Science (AAAS).
For ordinary people, comfort is the most basic and important requirement of smart clothes. Wang et al. prepared a natural alginate fiber actuator (Figure 10b).[ 138 ] When contacted with water or moisture, the fiber underwent reversible contraction and rotation. The rotation of the fiber controlled the opening‐closing motion of the fabric stomas. These breathable and fast‐dry clothes enable smart comfortability for human body. Jia et al. reported a moisture‐responsive textile (Figure 10c).[ 137 ] The actuators were fabricated by twisting and coiling silk fibers, which contracted and rotated in response to perspiration, water and humidity. As a demonstration, the silk fiber actuators were weaved into the sleeves of cloth in the warp direction. When humidity increased because of sweat or rain, the sleeves rolled up due to the contraction of the fiber actuators to enhance the evaporation, delivering cooling feeling. The sleeves were pulled down when the environment gets dry, presenting intelligent clothings that respond to the humidity and perspiration conditions.
In addition to humidity, temperature also takes a significant part in the wearable comfortability. Roach et al. developed a thermally responsive liquid crystal elastomer (LCE) fiber by direct ink writing. The LCE fibers were made into smart textiles by traditional textile fabrication processes like sewing, knitting, weaving (Figure 10d).[ 160 ] The LCE fibers would contract when temperature rises to about 80 °C, the pores of the textile will open to increase the heat dissipation and sweat evaporation. When the temperature cools down, the LCE fibers elongated and closed the pores. The fibers were demonstrated to sew into a common shirt daily life. The smart shirt shows fast response, which opened pores after the wearer stayed in the warm environment for 10 min, then returned to the original configuration when the wearer moved to a cool place for 5 min. In addition, thermal regulation textiles are reported by Cui and Hu's groups, designing textiles with nanophotonic structures to tailor infrared (IR) emission. The photonic textiles were able to perform both passive heating and cooling functions.[ 161 , 162 , 163 , 164 , 165 , 166 ]
However, the IR property of a textile is permanently predefined due to the fixed materials with certain weaving structure. Dynamic tunable thermal management is attractive for developing more intelligent garments. Zhang et al. produced a metatextile with smart and dynamically adaptive IR optical properties by combining the concept of fiber actuators and nanophotonic effect in a textile (Figure 10e).[ 167 ] When hot and/or wet, the yarn collapses and gets close together. The distance change induced resonant electromagnetic coupling and gated the IR radiation of the textile to enhance heat convection. At cold and/or dry conditions, the yarn responds in an opposite manner to reduce heat dissipation, enabling dynamic thermal management. Moreover, the active cooling shirt becomes possible owing to the torsional refrigeration effect of twisted fiber, namely, electrocaloric effect.[ 168 ] In addition, the textile patterning technology, originally developed for aesthetical reasons, is able to integrate a wider spectrum of functions into the smart clothing, like dynamic decoration, color change, and displays.[ 169 , 170 , 171 ] Textile processing permits scalable, rational and precise production. These mass‐produced fabric actuators showed good repeatability and controllability, paving the way for industrialization.[ 172 ] The many inherent advantages of textiles—omnipresence, pliability, wearability, and washability, are promising for the development of smart textiles, which can be integrated with the functional fiber/fabric actuators, sensors, energy sources and processor system.
3.4. Fiber‐Based Actuators with Sensors
The integration of fiber actuators and fiber sensors is aimed to construct a standalone smart fibers/yarns system. Such multifunctional fibers system monitors specific signals and automatically respond to it.[ 173 , 174 ] A stimulus‐responsive fiber is a simple passive self‐control system, which senses the change of environment and makes a mechanical response.[ 175 , 176 ] Besides, sensors endow the soft actuator with proprioception[ 177 , 178 ] and perception,[ 179 , 180 , 181 , 182 ] which are very importance for controlling and interactions between human–robots. Liu et al. fabricated a sheath–core conducting fiber with the core of elastomer and the sheath of carbon nanotube, it acted as both a capacitive strain sensor and an electrical torsional actuator. The fiber generated torsional rotation under Joule heating. Although the resistance did not change under stress, the capacitance of the fiber changed linearly related to the strain with very high sensitivity.[ 183 ] Yuen et al. sewed the shape memory alloy fiber actuator and liquid metal‐based sensor into a fabric separately. The fabric was deformed by the actuator and the deformation can be measured through the resistance change of the liquid metal.[ 184 ]
Yang et al. reported an origami robot integrated actuator, configuration sensor, and communication antenna (Figure 11a).[ 185 ] The metallic paper was synthesized by using graphene oxide coated cellulose paper as a sacrificial template. The metallic paper showed similar fiber structure network, which served as Joule heating resistor and strain sensor. Origami robot was demonstrated based on the metallic paper. When applying current, the metallic fiber backbone heated the shape memory alloy (nitinol) wires. The nitinol wires straightened out and brought the origami robot to bend about 60°. Besides, the metallic fiber network was an intrinsic strain sensor, whose electrical resistance was linearly related to the bending angle. The configuration of the robot can be monitored through the sensor in real time, allowing the feedback control of the movement. Furthermore, the metallic backbone also worked as a reconfigurable dipole antenna, which could receive and send electromagnet signals. Through the actuators, sensors and antennas, two robots communicated and cooperated with each other to fulfil obstacle avoidance and navigation tasks. The integration of actuating, sensing, and communicating enables the robots with multifunction and a wide range of applications.
Figure 11.
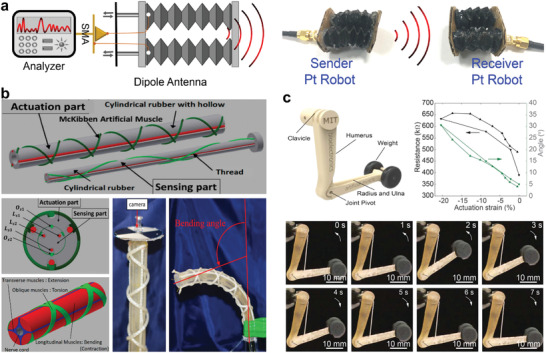
Fiber‐based actuators and sensors system. a) Origami robot integrated actuator, configuration sensor and communication antenna. Reproduced with permission.[ 185 ] Copyright 2019, The Authors, published by The American Association for the Advancement of Science (AAAS). b) Master–slave fiber robot system that controlled by operator. Reproduced under the terms of the CC‐BY Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0/).[ 139 ] Copyright 2019, The Authors, published by MDPI. c) Silver nanowire plated bimorph tendril like fiber for humanoid limb as artificial muscle and angle sensor. Reproduced with permission.[ 186 ] Copyright 2019, The Authors, published by The American Association for the Advancement of Science (AAAS).
Furukawa et al. described a master–slave robot system, which has potential applications in the field of welfare and surgery where the operator's sense and intent are important (Figure 11b).[ 139 ] The slave robot was configured with fibers reinforced pneumatic actuators and thread sensors. The slave robot performed bending and torsional movement under the control of the master robot. The bending and twisting motions of the slave robot were recorded by the encoders of the thread sensors to form close loop feedback control. The slave robot followed the master robot traces with small error and delay. The master robot can be worn or fixed on the operator's hand to control the slave robot remotely by gesture, demonstrating a wearable human–robot interacted platform.
Kanik et al. developed an artificial muscle that integrated both actuating and sensing functions (Figure 11c).[ 186 ] The bimorph tendril like fiber was made of cyclic olefin copolymer elastomer and polyethylene through thermally drawing. The fiber was covered by a layer of conductive nanowire mesh as a resistance strain sensor. Upon heating, the fiber contracted, while the resistance of the electrode monitored the contraction and elongation based on the piezoresistive feedback. The sensorized fiber actuators were affixed to a humanoid limb. The fiber actuators contracted when heated by hot gun, which brought artificial limb to bend. The bending angle of the limb was measured by the resistance change of the electrodes. Foroughi et al. investigated the actuating and sensing performance of the spandex/carbon nanotube composite yarns and demonstrated the application of the yarns in smart knee sleeve.[ 187 ] In summary, although the fiber actuators and fiber sensors have made great processes individually, seamless integration of them remains challenging. The feedback signals of the sensors are usually electrical, while the stimuli of actuators can be very diverse. The conversion between different physical quantities is important. A standalone system of fiber/fabric actuators requires integration with more delicate and compatible sensors that avoid cross‐talk, and may be feasible to realize fiber/fabric based mechanical computing. More detail advances on various fiber/fabric‐based sensors will be introduced next.
4. Fiber/Fabric‐Based Sensors for Wearables and Human–Robot Interface
Soft‐robots are inspired from the living organisms in terms of materials and mechanics, showing superiorities than rigid robots in adapting various complicated scenarios such as curved/irregular surfaces, random channels, and underwater.[ 6 , 188 ] Important progresses have been demonstrated in human–robot interfaces, manipulation, locomotion/exploration, wearables/rehabilitation, and minimal invasive or noninvasive medicine. All these functions are applicable to enhance the perception and response capabilities of soft‐robots to realize terrains navigation, space exploration, accurate operation, perception and coordination with humans.[ 189 , 190 , 191 , 192 , 193 , 194 ] Human–robot interfaces strive for more safe, friendly, highly perceptive and collaborative interactions. Robotic fiber/fabric enables minimal damages and excellent compatibility for human and environment.[ 195 , 196 , 197 ] Traditional merits of comfortability, skin affinity, and washability enable extensive applications fibers/fabrics in wearables and smart clothing. As one of the ideal mediums, fiber/fabric is promising to bridge an intelligent interface between soft‐robots and human, realizing feedback‐controlled interactive systems such as perceptive soft robots assisted with sensors/power sources, and wearable sensors for human to remotely operate or interact with the soft robots.
As an important part of the robotic fibers/fabrics, crucial role of the actuators is mechanical response to the external stimuli. Accurate actuations highly rely on the sensor modules, which are indispensable function for feedback‐control of the robots’ motions, improving the response time and manipulation accuracy by recognizing the touching/contacting fore with different objects which are hard or soft.[ 198 , 199 , 200 ] Some simple sensors have been demonstrated for improved controls of actuations in Section 3.4. More facile and compatible incorporation of sensors and actuators are being pursued to improve the interactive safety and human wearing perception. For instance, a perceptive garment could sense the interface conditions between clothes and human body such as temperature, moisture, and frictional coefficient, self‐actuate to realize smart thermal management[ 201 , 202 , 203 ] and humidity tuning[ 204 ] to improve the comfort, delivering safer and high‐quality interactions for human–machine. Therefore, development of fiber/fabric‐based sensors with meticulous designs and good integrabilities is significant for perceptive robots and human–robot interfaces.
Human–robot interactions are expected to have safe touch interface and favorable user experience. Wearable sensors based on fibers or fabrics exhibit advantages in skin affinity and integrabilities with human skin, gloves, and clothes, enabling remote manipulations with good safety and comfortability. A few of the examples have been demonstrated. Cheng et al. developed a polyurethane (PU) fiber strain sensor, by monitoring the complicated movements from movable joints such as elbow, waist, and knee in robotics, showing a real‐time detection of the movements during the robot dancing “Gangnam Style” (Figure 12a).[ 205 ] Zang et al. reported a fiber sensor for detecting the subtle deformation of epidermis and muscles, promising real‐time motions feedback to humans and soft robots.[ 214 ] Gong et al. designed a tattoo like piezoresistive sensor integrated with glove, detecting the finger motions to control a robot arm for manipulating the objects (Figure 12b).[ 206 ] Lee et al. reported a capacitive pressure sensor perpendicularly stacked by Kevlar fibers, demonstrating incorporation with garments to remotely operate drone and hexapod robot.[ 215 ] In addition, efforts were attempted to realize more functions in one fiber/fabric sensor to adapt the complex conditions, such as Liao et al. designed a PU/ZnO nanowires fiber sensor for strain, temperature and UV detection.[ 216 ] Chen et al. realized a waterproof ionic liquid/poly(dimethylsiloxane) (PDMS) core–shell helical fiber for detecting the strain, pressure, and temperature.[ 217 ] These sensors provided multiresponsive platform on wireless smart gloves and clothes to simplify the robotics operation and human–robot interactions.
Figure 12.
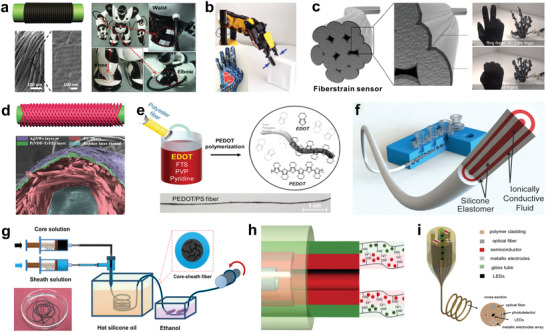
Fiber‐based mechanical sensors. a) A stretchable graphene‐coated PU yarn piezoresistive sensor for robots and human motions detecting. Reproduced with permission.[ 205 ] Copyright 2015, Wiley‐VCH. b) PANI/AuNW patches integrated textile glove for robot arm manipulation. Reproduced with permission.[ 206 ] Copyright 2015, American Chemical Society. c) Ag‐rich shelled PU fiber piezoresistive sensor for a hand robot control and deformation monitoring of an artificial bladder. Reproduced with permission.[ 207 ] Copyright 2018, American Chemical Society. d) Post‐coated rubber latex thread/PU fibers/P(VDF‐TrFE) nanofibers/AgNWs integrated piezoresistive strain sensor. Reproduced with permission.[ 208 ] Copyright 2016, Wiley‐VCH. e) In situ polymerizated PEDOT coated polyester fiber piezoresistive strain sensor. Reproduced with permission.[ 209 ] Copyright 2017, American Chemical Society. f) Extruded ionic liquid/silicone elastomer concentric piezoresistive strain sensor. Reproduced with permission.[ 210 ] Copyright 2015, Wiley‐VCH. g) Wet‐spun CNTs/silicone elastomer piezoresistive core–shell fiber sensor. Reproduced with permission.[ 211 ] Copyright 2018, American Chemical Society. h) Microfluidic spinning technique with multichannels. Reproduced with permission.[ 212 ] Copyright 2018, American Chemical Society. i) Thermal drawing fibers with multiple components. Reproduced with permission.[ 213 ] Copyright 2019, Wiley‐VCH.
In addition, fabric/textile electrodes are emerging to replace the traditional Ag/AgCl gel electrode[ 218 , 219 ] in electrocardiogram (ECG),[ 220 ] electromyogram (EMG),[ 221 ] and electroencephalogram (EEG),[ 222 ] achieving continuous health monitoring for recording the important bioelectrical information from cardiac activity, skeletal muscles, and brain.[ 223 , 224 , 225 , 226 , 227 ] Lee et al. developed a stretchable PU fiber to individually control a hand robot through resistance response, as well as monitor the expansion (volume) of an artificial bladder for controllable liquid extraction. (Figure 12c),[ 207 ] It promises healthcare monitoring for the patients who suffered from the neurogenic lower urinary tract dysfunction resulted from the spinal cord injury. Park et al. demonstrated a combined piezoelectric/piezoresistive strain sensor for interactive patient‐wheelchair control system.[ 228 ] These examples show multifunctional designs of wearable sensor for on‐demand integration with human body.
Soft robots and human–robot interfaces are highly‐integrated and complex engineering systems which rely on multifunctional sensors with delicate designs, high accuracy and multiresponse to various stimuli from human body or environments. In realizing self‐managing fiber/fabric‐based electronics with high‐integration and compatibility, meticulous design and fabrication of the sensors using textile engineering technologies are effective approaches. Fiber/fabric sensors with desired shapes, matching mechanical and electrical compliances for the targeted substrates, easy integration of the devices can be achieved by the mature processing of fibers and textiles.[ 16 , 17 ] Here, we summarize the progress of fiber/fabric sensors with responses to the stimuli from human body and environments around, including mechanical (piezoresistive and capacitive), thermal, humidity, and electrochemical metabolite sensors, concentrating on their configuration designs, fabrication methods, mechanisms and functions for applications in motion detection, physiological monitoring, environment perceptions and human–robot interfaces.
4.1. Fiber/Fabric‐Based Mechanical Sensors
Mechanical sensors that require additional power sources generally include piezoresistive and capacitive sensors, capable of converting the random mechanical stimuli into electrical signals such as changes in resistance, capacitance, current, etc., detecting the pressures, deformations, and motions.[ 229 , 230 , 231 ] Sensors in forms of fiber, yarn and fabric show their respective advantages in seamless system integration. But their features with differences in dimensions, material components, mechanical strengths, and application scenes, making it challenging to integrate with a same processing method. For example, fabrication of fiber sensors should consider more about the fiber materials and mechanical properties, either for direct application or subsequent sewing/weaving. In comparison, direct processing of sensors from fabric/textile should maintain permeability and comfortability of the devices. Here we concentrate on the fabrications and properties of a number of representative mechanical sensors in the forms of fibers/yarns and fabrics/textiles, respectively.
4.1.1. Fiber‐Based Mechanical Sensors
Fiber‐based sensors normally can be designed by winding, coating or deposition with functional layers, or direct spinning of fibers with active composites, which show advantages in accurate designs for further twisting into yarn sensors or sewing into fabrics/textiles as patterns.[ 173 ] Chen et al. developed a highly stretchable fiber strain sensor for electronic smart gloves (Figure 12d) using electrospinning nanofibers.[ 208 ] Typically, a highly elastic rubber latex thread as core, was winded around by cross‐wised PU fibers to construct an elastic scaffold. Under prestretching state, the PU fibers, which were further coated with poly(vinylidene fluoride‐co‐trifluoroethylene) P(VDF‐TrFE) nanofibers and Ag nanowires, attained a highly stretchable and conductive fiber after releasing to the initial state. The fiber shows sensitive resistance responses to tensile strain for monitoring human motions and subtle physiological signals (pulse and phonation). A sensor integrated smart glove for finger gestures detection in real time was presented. In addition to the post‐coating, in situ polymerization of poly(3,4‐ethylenedioxythiophene) (PEDOT) was applied by Eom et al., fabricating a piezoresistive polyester fiber strain sensor sewed on a fabric glove (Figure 12e),[ 209 ] showing high sensitivity and reliability for body‐motion monitoring, touch sensing, and multilevel strain recognition. The smart glove can wirelessly express American Sign Language via predefined hand gestures, promising to the user‐interfaces for soft robotics.
In addition, extruding and injecting processes were feasible for accurate fabrications of fiber sensor. Frutiger et al. demonstrated a multicore–shell fiber capacitive strain sensor by an extruding set‐up shown in Figure 12f.[ 210 ] Ionically conductive fluid and a silicone elastomer serve as the conductor and dielectric encapsulant, constructing a customized fiber with four concentric components by varying the inner/outer nozzle size, ink flow rates, and print speed, presenting a flexible and programmable manner for fiber sensor, which can be sewed in textile to monitor the walking gait and hand motion. Similarly, an injection process was applied by Yu et al. to fabricate a piezoresistive core–shell microfiber sensor for physiological monitoring,[ 232 ] where a conductive liquid metallic alloy (eutectic gallium indium, (eGaIn)) was enclosed by a home‐made PDMS elastomeric microtube. The elastomeric layer enables the fiber sensor was stretchable and washable to resist degradation, which are significant properties for wearable textile devices.
Traditional textile manufacturing process is also effective for electronic fiber/fabric fabrication, such as wet spinning that could produce fibers with unlimited‐length and micrometers/millimeters in diameter. Tang et al. demonstrated a coaxial stretchable fiber strain sensor by one‐step wet‐spinning assembly strategy (Figure 12g).[ 211 ] Two channels were used for extruding out carbon nanotubes and silicone elastomer, respectively, the extruded hybrid ink would maintain its filamentary shape and solidify in several minutes through a coagulation solution of a higher‐viscosity silicone oil (1000 cs) at ≈100 °C, completing the vulcanization process to form an elastomeric conductive fiber winded on a spool. The piezoresistive core–shell fiber sensor shows high stretchability (300%) and fast response with low hysteresis, excellent stability (>10 000 cycles) and washability were demonstrated, which can be attached on skin, or woven in gloves and garments, detecting both subtle and large‐scale human movements, exhibiting application potential under harsh conditions. It provides a good candidate for wearable electronics, human–robot interfaces, and soft robotics.
Fiber sensors show advantages in accurate designs of their structures and performances, which could be also realized by microfluidic technique integrated with wet spinning (Figure 12h), and thermal drawing technology (Figure 12i) with multichannels, enabling a fiber/yarn integrated with various components, such as metallic electrodes, semiconductors, dielectric materials, and polymer claddings, etc. Considering the subsequent processes such as twisting, sewing or weaving, the sensing fibers should have certain properties including a consistent diameter, low elongation and good flexibility to allow formation of small loops but without tangles or kinks, ensuring excellent integrability with textiles and garments.
4.2. Fabric‐Based Mechanical Sensors
Fabric sensors with larger areas and functional patterns are to be realized, enabling the touch sensing functions with higher operability and accuracy. Tremendous efforts have been made to directly fabricate the sensors based on fabrics or textiles, which are ideal substrates for wearables, also compatible for integration with the robotic fiber/fabric.[ 233 , 234 ] Wang et al. developed a stretchable and wearable strain sensor by facilely carbonizing silk fabric as the electrode (Figure 13a),[ 235 ] they confirmed that the plain‐weave silk fabric shows the best performance, exhibiting high sensitivity, fast response of 70 ms, wide sensing range from 0% to 500% strain, as well as excellent durability (10 000 cycles). The fabric sensor can detect both large and subtle human motions. Meanwhile, Zhang et al. from the same group demonstrated a dry‐Meyer‐rod‐coating process to coat graphite flakes on the silk fibers, as conductive component for the fabric strain sensor (Figure 13b).[ 236 ] These superior performances to some extent depend on the encapsulation in virtue of additional Ecoflex elastomer, rendering blocked fabric holes with sacrificed air permeability. For ultimate wearables and human–robot interfaces, durable device with better wearability and comfortability is pursued.
Figure 13.
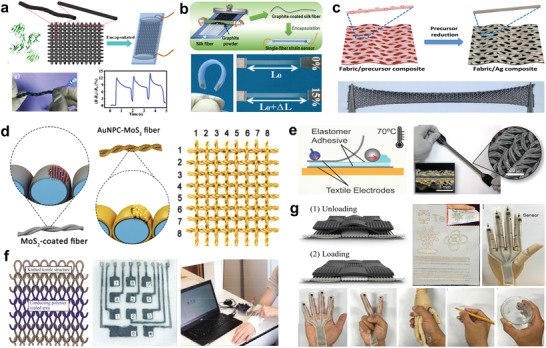
Fabric‐based mechanical sensors. a) Carbonized silk fabric piezoresistive strain sensor. Reproduced with permission.[ 235 ] Copyright 2016, Wiley‐VCH. b) Bar‐coated graphite silk piezoresistive strain sensor. Reproduced with permission.[ 236 ] Copyright 2016, American Chemical Society. c) In situ reduced AgNPs coated polyester textile piezoresistive strain sensor. Reproduced with permission.[ 238 ] Copyright 2017, Wiley‐VCH. d) In situ grown AuNPs textile piezoresistive pressure sensor. Reproduced with permission.[ 239 ] Copyright 2020, American Chemical Society. e) Adhesive thermally bonded robust Ag‐plated textile capacitive strain sensor. Reproduced with permission.[ 240 ] Copyright 2017, Wiley‐VCH. f) Brush‐printed PEDOT:PSS patterned knitted textile capacitive touch sensor. Reproduced with permission.[ 241 ] Copyright 2016, Wiley‐VCH. g) Laster patterning and electroless deposition enabled Ni/CNT functionalized polyester/cotton fabric as piezoresistive pressure sensor. Reproduced with permission.[ 242 ] Copyright 2017, Wiley‐VCH.
Therefore, electronic dyeing method was exploited to overcome the shortcomings of breathability of fabric/textile sensors. Yang et al. presented a polyester fabric strain sensor with in‐situ reduced graphene at high temperature of 200 °C,[ 237 ] showing a distinctive negative resistance variation with increasing strain due to the tunable weaving structures of fabric, in which horizontal and vertical interwoven structures contribute different detection sensitivities with long‐term stability. Li et al. developed a stretchable polyester textile with silver nanoparticles by in situ reduction at mild temperature of 90 °C (Figure 13c), as a piezoresistive sensor which was proved for multiresolution motion monitoring.[ 238 ] Lan et al. proposed a more precise one‐step strategy to produce yarns for textile pressure sensor (Figure 13d).[ 239 ] Prestretched double‐twisted yarn with complete coating of metallic MoS2 nanosheets was immersed into hexachloroauric acid (HAuCl4) for spontaneous growth of popcorn‐like Au architectures, and weaved into a plain textile sensor array with high sensitivity (0.19 kPa−1) and fast response (93 ms). These sensors with no polymer encapsulations show great comfort and mechanical compliance, indicating that the electronic dyeing process is a simple and effective way to maintain the intrinsic merits of textiles, improving the breathability and comfortability.
Mechanical strength of electrode of the fabric sensors is another concern. Atalay et al. addressed this issue in a fabric capacitive sensor using a commercial conductive textile (Shieldex Medtex‐130) as electrode (Figure 13e),[ 240 ] consisting of two silver‐plated knit textile electrodes with a dielectric layer of silicone elastomer (Ecoflex 00‐30) in between. The fabric can be tightly integrated into a glove for hand motions monitoring. Importantly, robustness of this device was significantly improved due to the commercial textile electrode with good mechanical properties, and the authors introduced a flexible and robust electrical connection between coaxial cable and fabric electrode using instant adhesive by thermal bonding, promising to solve the external connection issue which is a known challenge for the current fabric wearables.
For human–robot interfaces, advanced touch sensing functions are required to address more accurate manipulation with fast responses. Touch patterns design on the fabric/textile is effective to fabricate the sensor arrays, realizing efficient responses to the spatially map tactile stimuli. Takamatsu et al. demonstrated a brush‐printing method to pattern the polymer poly(3,4‐ethylenedioxythiophene)‐doped polystyrene sulfonate (PEDOT:PSS) ink on a fabric, followed by covering a thin dielectric layer of PDMS, resulting in a fabric capacitive touch sensor with 30% stretchability (Figure 13f).[ 241 ] It can be worn on human arm as a keyboard for more accurate sensing, showing improved wearability as the fabric was partially coated with polymer. Moreover, Liu et al. developed a large‐area all‐textile piezoresistive pressure sensor by combining processes of laser patterning, electroless deposition, and dip‐coating based on polyester and cotton fabrics (Figure 13g).[ 242 ] A patterned Ni deposited polyester fabric and a CNT‐coated cotton fabric were stacked to construct the sensor, an optimized cotton‐based device shows high sensitivity of 14.4 kPa−1 for pressure below 3.5 kPa, 7.8 kPa−1 for pressure range of 3.5–15 kPa, low detection limit of 2 Pa and fast response time of ≈24 ms with 1000 cycles. The textile pressure sensor could be attached on human skin to monitor various vibrations and real‐time pulse wave, pressure mapping was presented using the textile sensor arrays incorporated with garment.
Compared with fiber/yarn‐based mechanical sensors, sensors based on fabric/textile present performance superiorities in larger sensing area and desirable sensing arrays. Owing to the good mechanical properties of fabric/textile, various facile nano‐/micro‐coating processes such as dip‐coating, spin‐coating, spray‐coating, electro/electroless deposition, in situ growing, and pattering techniques can be applied, showing low‐cost, high operability/applicability, and potential of large‐scale production. Compared with the traditional planar polymeric or elastomeric mechanical sensors, fabric/textile‐based sensors by these functional finishing/dyeing techniques can optimally maintain the porous woven structures, keeping the air permeability and comforts for wearables and human‐touching applications.
4.3. Fiber/Fabric‐Based Thermal Sensors
Besides the mechanical motion detection, temperature sensor is another important tool for robots and human to sense the thermal conditions around or realize healthcare monitoring.[ 243 , 244 , 245 , 246 ] Thermal sensing mechanism commonly relies on the thermally sensitive polymer matrixes loaded with conductive materials to have electrical resistance response upon changing the temperature, or semiconductors with temperature‐dependent conductivity, and upconversion materials which have responses in light emission intensity dependent on the temperature.[ 247 ] A few of studies have been exploited to develop the thermal sensors in forms of fibers or fabrics, improving the integrability of devices for robotic fibers/fabrics and allowing wearables have higher compatibility with human body.
He et al. applied the dyeing process of in situ polymerization to produce a polypyrrole (PPy)‐coated thread, which was winded on an elastomer PU fiber to assemble a stretchable temperature sensor (Figure 14a).[ 248 ] Dacron thread was found to have higher mechanical stability during dyeing process than cotton and nylon threads, showing longer‐term application potential. As PPy shows higher conductivity upon the increase of environmental temperature due to mechanism of hopping conduction, the fiber sensor can respond to the temperature change from 35 to 95 °C. A glove integrated with fiber thermal sensors could perceive the temperatures at different regions of a cup of hot water. Utilizing the capability of PPy for converting near‐infrared (NIR) irradiation to thermal heat, the sensor was also capable of detecting the NIR irradiation intensity. PPy was also incorporated into the thermoplastic polyurethane (TPU) to enhance the mechanical and electrical stabilities of fiber, delivering both thermal sensor and strain sensor, length of 20 m was proved through the conventional melting extrusion and dyeing processes (Figure 14b).[ 249 ] Wet‐spinning technique was employed by Trung et al. to fabricate the thermal sensor based on a freestanding reduced graphene oxide (rGO) fiber, showing fast response time (≈7 s) and quick recovery (≈20 s) to temperature, it was compliantly integrated into socks and undershirts for environmental and skin temperature monitoring (Figure 14c).[ 250 ] These examples promise important applications for improving the perceptions of robots, serving for healthcare and human–robot interactions.
Figure 14.
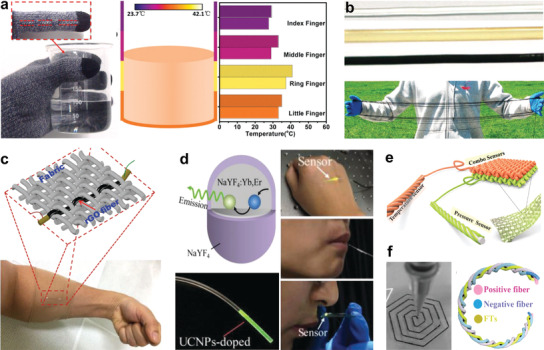
Fiber/fabric‐based thermal sensors. a) Stretchable PU fiber temperature sensor winded by thread coated with in situ polymerized PPy. Reproduced with permission.[ 248 ] Copyright 2016, Wiley‐VCH. b) PPy incorporated TPU fiber thermal sensor. Reproduced with permission.[ 249 ] Copyright 2018, Wiley‐VCH. c) Wet‐spun rGO fiber temperature sensor. Reproduced with permission.[ 250 ] Copyright 2018, Wiley‐VCH. d) Upconversion nanoparticles enabled stretchable PDMS temperature‐sensitive optical fiber. Reproduced with permission.[ 251 ] Copyright 2019, Wiley‐VCH. e) Dual‐mode fabric for temperature and pressure sensors. Reproduced with permission.[ 252 ] Copyright 2019, Wiley‐VCH. f) 3D printing hybrid yarn integrated with supercapacitor and temperature sensor. Reproduced under the terms of the CC‐BY Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0/).[ 253 ] Copyright 2018, The Authors, published by Wiley‐VCH.
Dependency of light emission intensity of fiber on the thermal changes is also an effective route to produce fiber thermal sensor. Guo et al. developed an interesting stretchable and temperature‐sensitive step‐index PDMS optical fiber incorporated with upconversion nanoparticles (UCNPs) (Figure 14d).[ 251 ] Typically, thermally sensitive UCNPs with core–shell structure (core, NaLuF4:Yb,Er, shell, NaLuF4) were predoped into PDMS precursor with higher reflective index (RI = 1.424), as core material which was injected into a mold of silicone tube for curing, the resultant core PDMS fiber was dip‐coated with another PDMS precursor with low‐RI (1.417) to generate a cladding layer, which was cured to assemble into a step‐index core‐cladding PDMS optical fiber. The thermally coupled 2H11/2 and 4S3/2 energy states of Er3+ rendered ratiometric readout of emission intensities of the upconversion optical fiber at different temperatures around, enabling a fluorescent sensing probe with optical alternatives for environmental sensing and health monitoring, such as temperature of skin, mouth, breath, etc.
In addition, multifunctional textile sensors to simultaneously detect the temperature and pressure was reported by Wu et al., silkworm fibers‐sheathed polyester (PET) yarns were integrated with CNT/ionic liquid conductive components to allow resistance response to the temperature change, thus as thermal sensor. Silk fiber‐wrapped polyurethane (PU) yarn coated with Ag NWs electrode was applied as a fabric capacitance pressure sensor. Thus, a dual‐mode sensor with sensing abilities for both temperature and pressure could be realized by weaving two fabrics with distinct functions (Figure 14e).[ 252 ] Besides, Zhao et al. innovatively integrated supercapacitor and temperature sensor together as a single yarn by 3D printing, enabling wearable yarns for both energy storage and temperature monitoring (Figure 14f).[ 253 ] These hybrid fiber/yarn‐based sensors show great potential in intelligent integration with robotic fiber/fabric and human–robot interactions.
4.4. Fiber/Fabric‐Based Humidity Sensors
Humidity is another considerable factor for soft robots and wearables in addition to temperature. Humidity sensor enables robots with additional ability to sense and response to the moisture conditions in real‐time, realizing more accurate operations.[ 254 ] For human, humidity sensor integrated with garments, hats, masks, and bandages, could detect the human perspiration, respiration, and moisture level at the skin‐textile interface, figure out the status and properties of the used masks, delivering the progress of wound recovery, it is highly useful to indicate the wearing comfort of human body and the frictional strength of textile for skin. Commonly, mechanisms of changes in electrical resistance or capacitance were applied to design the humidity sensor based on fibers/fabrics.[ 255 ]
Choi et al. developed a nitrogen‐doped graphene fiber by wet‐spinning and thermal annealing, which was further decorated by ultrathin (≈2 nm) platinum nanoparticles (Pt NPs) through optical sintering technique (Figure 15a).[ 256 ] The Pt NPs possess effective dissociation ability for water molecules, crucial for enhancing the humidity sensing performance of the rGO fiber, realizing increased sensitivity from 3.53% to 4.51%. A breath sensor was presented by integrating with a portable sensing module. Zhou et al. applied wet‐spinning technique to fabricate an ultratough CNT/PVA fiber, based on the swelling effect of PVA molecular chains upon adsorbing water molecules, the fiber stitched onto a hydrophobic textile shows good sensitivity to the humidity through resistance changes (Figure 15b).[ 257 ] It could be used to detect water leakage of a high hydrophobic textile, or as biomedical textile for sweat level or blood leakage monitoring.
Figure 15.
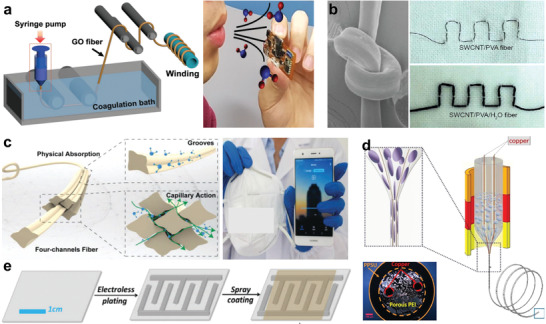
Fiber/fabric‐based humidity sensors. a) Wet‐spun nitrogen‐doped graphene fiber humidity sensor. Reproduced with permission.[ 256 ] Copyright 2018, Wiley‐VCH. b) Wet‐spun CNT/PVA fiber humidity sensor. Reproduced with permission.[ 257 ] Copyright 2018, American Chemical Society. c) Abnormal cross‐sectioned hydrophobic fibers winded humidity sensor. Reproduced with permission.[ 258 ] Copyright 2019, Wiley‐VCH. d) Thermal drawn polyetherimide fiber humidity sensor. Reproduced under the terms of the CC‐BY Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0/).[ 259 ] Copyright 2018, The Authors, published by MDPI. e) Nickel/GO electroless plated silk fabric humidity sensor. Reproduced with permission.[ 260 ] Copyright 2018, Royal Society of Chemistry.
Mechanism of capacitance response is also effective for humidity sensor in addition to resistance changes. Ma et al. proposed a yarn‐sensor by winding the hydrophobic yarns (polyester, Coolmax, Pentas, and Cleancool) with high specific surface area and abnormal cross‐section on a copper wire, the grooves of the fibers enabled abundant gas between the fibers and yarns, inducing enhanced capillary effect to accelerate adsorption of water molecules on the fibers, resulting in increases in capacitance. The device shows quick response time of 3.5 s and recovery of 4 s, and was demonstrated as smart mask for human breath detection (Figure 15c).[ 258 ] Besides, thermal‐drawing is also an attractive technique for realizing functional fibers with precise designs and configurations. A porous polyetherimide (PEI) fiber with two copper wire electrodes inside was developed by Tousi et al. for capacitive humidity sensor (Figure 15d).[ 259 ] In addition to fibers, fabric was also proved for direct fabrication of humidity sensor, Li et al. patterned the nickel interdigital electrodes on silk fabric using electroless plating, followed by spraying coating with a layer of graphene oxide (GO), the resultant Ni‐GO silk fabric can be applied as mask for human respiration monitoring in real‐time (Figure 15e).[ 260 ] Additional humidity sensing ability renders fibers/fabrics with more potentials in applications of soft robots, wearables, human–robot interfaces, and biomedical applications.
4.5. Fiber/Fabric‐Based Metabolite Sensors
In addition to the parameters such as mechanical motions, temperature, and humidity of robots, human body and around, wearable electrochemical sensors such as colorimetric and potentiometric ion sensors have become a class of exciting analytical platforms, which encompass material, chemical and electronic efforts to supply physiological information during certain human activities, promising to build more effective human–robot interaction.[ 261 , 262 , 263 ] Compared with traditional film‐based devices with special microfluidic channels, fabrics/textiles show superiority in sweat uptake from sweat gland due to their higher specific surface area and excellent mechanical adaptability which are more compatible with skin.[ 264 ]
Individual sweat level indicates a person's physical status and comfort level. It is interesting to realize the self‐actuating garments for perspiration monitoring and human perception improving. Promphet et al. reported a noninvasive colorimetric textile for detection of sweat pH and lactate, realized by depositing three functional layers including chitosan, sodium carboxymethyl cellulose, and indicator dye (methyl orange and bromocresol green) or lactate enzymatic assay on a cotton fabric (Figure 16a).[ 265 ] The pH indicator (pH = 1–14) fabric gradually changed from red to blue as the pH increased, the intensity changes of purple color indicate the concentration variation of lactate ((0–25) × 10−3 m) in the sweat. This is a visual approach to monitor the physiological conditions from wear during activity. To transmit the sweat information into visible signals on user interfaces, Jia et al. designed a conductive thread‐based textile sensor for constant perspiration level monitoring (Figure 16b).[ 266 ] The sensor consists of three conductive threads, each of them was surrounded and fixed by a braided cotton cover, helping to adsorb the sweat to change the resistance between threads, indicating the sweat quantity thus deducing the perspiration levels. An integrated smart wireless t‐shirt consisted of sweat sensor, thermal/humidity sensor, battery, MCU, WIFI, etc. was proposed as Figure 16b, showing the possibility to construct an intelligent garment with actuation function for real‐time feedback of the sweat levels, improving human perception and comfort.
Figure 16.
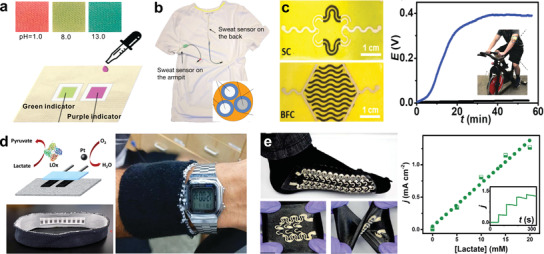
Fiber/fabric‐based metabolite sensors. a) A colorimetric textile by functional depositing with indicator dye or lactate assay for sweat pH and lactate detection. Reproduced with permission.[ 265 ] Copyright 2019, Elsevier. b) A three conductive threads‐based textile for constant detection of perspiration level. Reproduced under the terms of the CC‐BY Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0/).[ 266 ] Copyright 2018, The Authors, published by MDPI. c) A stretchable power textile with screen‐printed hybrid supercapacitor‐biofuel cell. Reproduced with permission.[ 267 ] Copyright 2018, Royal Society of Chemistry. d) A textile biofuel cell for self‐powered source. Reproduced with permission.[ 268 ] Copyright 2014, Royal Society of Chemistry. e) A stretchable textile biofuel cell for self‐powered sweat sensor. Reproduced with permission.[ 269 ] Copyright 2016, Royal Society of Chemistry.
5. Self‐Powered Fiber/Fabric for Robots and Wearables
Although the majority of wearable thermal, humidity, mechanical, and electrochemical sensors are available for assisting soft robotics, human–robot interfaces, activity detecting and health monitoring, challenges still remained on further improving operability and applicability of these fiber/fabric‐based sensors for light‐weight robotic system seamless integration. One of the daunting challenges is power source, which is a bulky and unhandy but indispensable module with high control precision for both sensors and robots.[ 270 ] Therefore, tremendous efforts have been made to realize the self‐powered systems at multiscenarios around human body, enabling self‐powered sensors and wearable power sources with promises to realize the health monitoring for human in real‐time, and more accurate electrical controls for robotic systems.[ 271 , 272 , 273 , 274 ] To date, representative techniques including biofuel cell, thermoelectric generator (TEG), piezo‐/triboelectric nanogenerator (PENG/TENG), and solar cells are available for developing the self‐powered fibers/fabrics. These techniques are interesting to utilize the energy from human body or from surrounding environments, promising the wearable power sources and self‐powered sensors as potential platforms for robotic fiber/fabric integration, building interactions between human and soft robots by means of fibers and fabrics.
5.1. Biofuel Cell Self‐Powered Fibers/Fabrics
Biofuel cell is a kind of electrochemical device, utilizing the bio‐secretions or metabolites in sweat, tears, or saliva, as electrolytes to trigger the devices to generate electricity, useful in energy harvesting and sensing during strenuous exercises.[ 275 , 276 , 277 ] With designs in terms of biofuel cell, fabric or textile could serve as both power source and wearable sensors of metabolites. Lv et al. presented the first stretchable and wearable textile‐based hybrid supercapacitor–biofuel cell (SC‐BFC) by screen‐printing with functional ink of MnO2‐CNT/CNT/PEDOT:PSS. The hybrid system can harvest biochemical energy from sweat of wearers by BFC and store in SC module for convenient use (Figure 16c).[ 267 ] Lactate in the sweat was utilized for enzymatical oxidation to produce electricity, which is an irregular power dependent on the perspiration of user. Storage of this intermittent electricity into the SC is a promising route to provide stable output for long term use.
The self‐powered application of textile biofuel cell was reported by Jia et al. by thick‐film printing technology, a biofuel cell driven by sweat lactate and dissolved oxygen can generate electricity of 100 µW cm−2 at 0.34 V, which was integrated into a headband and a wristband assisted by a printed‐circuit board (PCB)‐based energy storage device, the textile biofuel cell was demonstrated to power a LED or a digital watch (Figure 16d).[ 268 ] Furthermore, Jeerapan et al. addressed a stretchable textile biofuel cell as wearable self‐powered sensor. Synergistic effect of nanomaterials inks (PU/CNT/mineral oil, or Ecoflex/Ag/AgCl) and a serpentine circuit by screen printing were applied to realize the deformable device, showing good endurance for stretching, indentation, and torsional twisting (Figure 16e).[ 269 ] Glucose and lactate as the biofuels can produce the maximum power density of 250 µW cm−2 at 0.46 V, exhibiting stable power output after 100 cycles of 100% stain. This textile biofuel cell could generate power signals proportional to the sweat fuel concentration, acting well as a selective self‐powered sensor for physiological information detecting.
Screen printing is an effective method to realize the accurate and deformable electrode patterns on fabrics or textiles, constructing the wearable biofuel cells for incorporation with garments. The challenge is design of the conductive inks with matched surface tension and mechanical compliance with the fabric/textile substrates. Surface tension is crucial to ensure the quick cure of printed ink on the textile without spreading or shrinking, guaranteeing high accuracy. Good deformability of the ink could accommodate well with the textile substrate during working under various deformations. Commonly, conductive fillers such as silver flakes, silver nanowires, silver nanoparticles, carbon black, and carbon nanotubes, graphite, graphene, conductive polymers, etc.[ 278 , 279 , 280 , 281 , 282 , 283 , 284 , 285 , 286 , 287 ] could be incorporated with elastomeric polymers such as poly(dimethylsiloxane) (PDMS), styrene–ethylene–butylene–styrene (SEBS), ethylene‐vinyl acetate (EVA), fluoroelastomer, functional polyurethanes (FPUs), and various elastomers, realizing stretchable or self‐healing conductive inks with good physical penetrability and mechanical stability for printing on fabrics/textiles.[ 221 , 288 , 289 , 290 , 291 , 292 , 293 , 294 ]
5.2. Thermoelectric Self‐Powered Fibers/Fabrics
As biofuel cell relies on the bio‐secretions as electrolyte, the individual biofuel cell usually generates intermittent electricity, thus more suitable during strenuous exercises, it is expected to be further improved as continuous power sources. Textiles and garments are mostly in contact with human body, thus fiber/fabric‐based thermoelectric generator (TEG) for converting human body heat into electricity is an attractive self‐powered wearable technique.[ 295 ] Kim et al. developed a glass fabric‐based TE generator by screen printing with precursors of Bi2Te3 (n‐type) and Sb2Te3 (p‐type) pastes, annealing at 530 °C to achieve the flexible TE device (Figure 17a). Shortcoming is that the glass fabric is not a good substrate for wearable application.[ 296 ] Wu et al. designed a sandwiched TEG with 3D fabric substrate and yarns coated with thermoelectric materials as legs, allowing temperature difference in the fabric thickness direction for body heat conversion.[ 297 ] But the 3D fabric is too thick and coated with many conductive paint electrodes that would reduce comfort.
Figure 17.
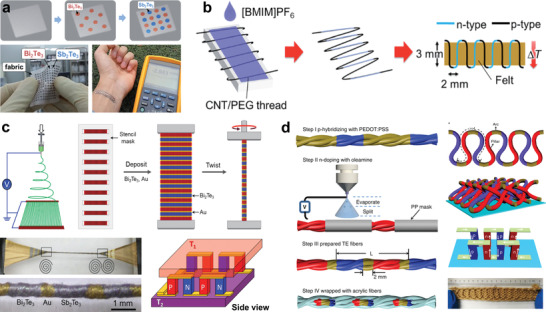
Thermoelectric self‐powered fibers/fabrics. a) A wearable thermoelectric glass fabric. Reproduced with permission.[ 296 ] Copyright 2014, Wiley‐VCH. b) A π‐type structured thermoelectric thread by wet spinning. Reproduced with permission.[ 298 ] Copyright 2017, Royal Society of Chemistry. c) Thermoelectric yarns twisted by electrospun PAN nanofibers sheet sputtered with Sb2Te3 (p‐type), and Bi2Te3 (n‐type). Reproduced with permission.[ 299 ] Copyright 2016, Wiley‐VCH. d) CNT films twisted yarns deposited with PEDOT:PSS and oleamine for stretchable 3D thermoelectric fabric. Reproduced under the terms of the CC‐BY Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0/).[ 300 ] Copyright 2020, The Authors, published by Springer Nature.
For wearables or human–robot interfaces, the devices should be flexible, conformable, and stretchable for adaptative integration with garment on a large scale. Challenges remained on effective assembly of both n‐type and p‐type segmented fibers/yarns in the fabric/textile, realizing architecture with multiple units of thermoelectric (TE) modules that enables thermal gradient in the textile thickness direction, instead of the in‐plane direction, harvesting heat flowing between human body and environment. π‐type TE modules woven in fabrics/textiles was demonstrated an effective method to address this concern. Ito et al. fabricated a CNT/polyethylene glycol (PEG) conductive thread by wet spinning, which was winded around a long and narrow plastic plate, followed by dropping the doping agent 1‐butyl‐3‐methylimidazolium hexafluorophosphate ([BMIM]PF6) onto only side of the plate, producing alternating n‐ and p‐type segments in the thread (Figure 17b).[ 298 ] As thermoelectric module it can be woven into a fabric as repetitive units of π‐type structure for thermal energy harvesting from human body.
Lee et al. fabricated aligned polyacrylonitrile (PAN) nanofibers (≈600 nm) using electrospinning with collector of counter electrodes, gold, Sb2Te3 (p‐type), and Bi2Te3 (n‐type) were sequentially sputtered on both sides of a PAN nanofibers sheet by stencil mask‐based method, then twisting the sheets into flexible yarns (tiger yarns, 300–380 µm) containing alternating n‐ and p‐type segments (Figure 17c).[ 299 ] When the tiger yarns were woven as a plain fabric separated by insulating yarns, higher power density (2.3 × 10−5 mW cm−2 K−2) was realized than that of the zigzag‐ (3.6 × 10−6 mW cm−2 K−2) or garter‐stitch (3.0 × 10−6 mW cm−2 K−2) textiles assembled with separately prepared n‐ and p‐type TE yarns with no insulating yarns. It indicates that the textile thermoelectric performance could be realized by increasing the density of TE couples and TE yarns through improving the weaving structure. Accordingly, Sun et al. designed a stretchable 3D fabric by weaving the thermoelectric fibers (Figure 17d).[ 300 ] Typically, carbon nanotube (CNT) films were twisted into CNT fibers/yarns (CNTF), alternating p‐ and n‐doping for the CNTF were performed by dip‐coating with PEDOT:PSS and electrospray with oleamine using shadow mask, respectively. The TE yarns were further wrapped into thermal insulating acrylic fibers, developed as π‐type TE modules for weaving into a freestanding 3D TE generator by means of the elasticity of the interlocked yarns. It requires only the CNT yarns segments without doping expose on both side of the fabric, maximizing the thermal contact with the hot or cold source, such as human body and ambient environment. The peak power density of 70 mW m−2 at a temperature difference of 44 K was demonstrated even at stretching of 80% strain. This TE fabric could be facilely integrated with garments, showing excellent potential to harvest human body heat for driving the wearable electronics. In addition, thermoelectric device has been widely used for self‐powered sensing,[ 301 , 302 , 303 , 304 ] transplanting the technique on fibers or fabrics would be an alternative route for realizing perceptive robots, smart garments, and wearables for continuous healthcare monitoring.
5.3. Piezo‐/Triboelectric Self‐Powered Fibers/Fabrics
Effective thermoelectric fabrics/textiles normally require certain thickness to allow the available temperature difference for favorable conversion efficiency. In comparison, nanogenerator such as piezoelectric nanogenerator (PENG)[ 305 , 306 , 307 ] and triboelectric nanogenerator (TENG),[ 308 , 309 , 310 ] are low‐cost, lightweight, but possess high performance to convert various mechanical energy of low frequency (vibrations, deformations/displacements) into electricity, such as energy from human motions, water, wind, etc., showing extensive application scenarios to harvest the distributed energy from human activities or environments,[ 311 , 312 , 313 , 314 , 315 , 316 ] delivering various self‐powered systems for recognizing force, deformation, and properties of solids, liquids and gases.[ 317 , 318 , 319 , 320 , 321 , 322 , 323 ] Here we summarize the representative nanogenerators designed in forms of fiber/yarn and fabric/textile, suitable for self‐powered wearable applications and intelligent robots with high adaptivity to various environments.
PENG operates based on the mechanical deformation of piezoelectric component, thus reliable configurations are required on the devices in forms of fibers/yarns and fabrics/textiles that have complex structures. Chang et al. applied near‐field electrospinning to direct‐write poly(vinylidene fluoride) (PVDF) nanofibers, realizing in situ mechanical stretch and electrical poling to produce piezoelectric fibers (Figure 18a),[ 324 ] which can generate consistent electricity (≈30 mV, ≈3 nA) upon repeatable stretching, exhibiting higher outputs than the traditional PVDF films due to lesser defects in the written nanofibers which have a higher degree of crystallinity and chain orientation. Li et al. reported a pressure‐driven piezoelectric fiber based on carbon fiber with growing of ZnO architectures, which generates voltage of 3.2 V and current density of 0.15 µA cm−2, promising to harvest energy in gas/oil pipes and blood vessels for medical sensing (Figure 18b).[ 325 ] Higher piezoelectric output can be realized on the fabric/textile devices, Zeng et al. applied electrospinning to produce a PVDF‐sodium niobite (NaNbO3) nanofibers nonwoven fabric, fabricating a PENG after integrating with two elastic electrodes of conducting knitted fabrics (consisted of polyurethane and silver coated polyamide yarns), the device with PDMS cladding can produce voltage of 3.4 V and current of 4.4 µA under cyclic compression (0.2 MPa, 1 Hz) (Figure 18c).[ 326 ] Soin et al. applied PVDF monofilaments as 3D piezoelectric component inserted by silver coated polyamide fabrics, delivering considerable power density of ≈5.1 µW cm−1.[ 332 ] To realize a PENG with a fully woven structure with good breathability, Zhang et al. fabricate a piezoelectric fiber of barium titanate/poly(vinyl chloride) (BaTiO3/PVC) by wet spinning, which was woven with copper wires and cotton threads, constructing a piezoelectric fabric as wearable power source and self‐powered sensor (Figure 18d).[ 327 ] In addition, hybrid fabrics/textiles combined with configurations of PENG and TENG have been exploited to further improve the electrical outputs.[ 333 , 334 , 335 , 336 , 337 , 338 ] In comparison, operation of TENG depends on the frictions of two surfaces is more compatible for interaction with human body.
Figure 18.
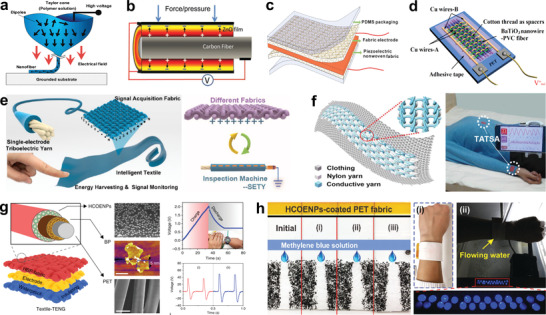
Piezo‐/triboelectric self‐powered fibers/fabrics. a) A direct‐written PVDF piezoelectric fiber. Reproduced with permission.[ 324 ] Copyright 2010, American Chemical Society. b) Carbon fiber/ZnO nanostructures fiber PENG. Reproduced with permission.[ 325 ] Copyright 2011, Wiley‐VCH. c) A PVDF‐NaNbO3 nonwoven fabric‐based PENG. Reproduced with permission.[ 326 ] Copyright 2013, Royal Society of Chemistry. d) A fully woven PENG based on BaTiO3/PVC fiber. Reproduced with permission.[ 327 ] Copyright 2015, Elsevier. e) A continuous triboelectric yarn based on PVDF/PAN nanofibers. Reproduced with permission.[ 328 ] Copyright 2020, American Chemical Society. f) A washable triboelectric all‐textile sensor for arterial pulse waves and respiratory monitoring. Reproduced with permission.[ 329 ] Copyright 2020, The Authors, published by American Association for the Advancement of Science (AAAS). Reprinted/adapted from ref. [ 329 ]. © The Authors, some rights reserved; exclusive licensee American Association for the Advancement of Science. Distributed under a Creative Commons Attribution NonCommercial License 4.0 (CC BY‐NC) http://creativecommons.org/licenses/by‐nc/4.0/. g) A skin‐actuated sandwiched all‐fabric TENG with high sensitivity for both voluntary and involuntary contacts with human skin. Reproduced under the terms of the CC‐BY Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0/).[ 330 ] Copyright 2018, The Authors, published by Springer Nature. h) A wearable all‐fabric TENG with capability for moisture screening and water energy harvesting. Reproduced with permission.[ 331 ] Copyright 2017, Wiley‐VCH.
Various TENGs have been also designed in forms of fibers,[ 339 , 340 ] yarns,[ 341 , 342 , 343 ] and fabrics/textiles[ 344 , 345 , 346 ] by the well‐established textile manufacturing technologies such as dyeing, twisting, winding, sewing, and weaving, etc.[ 347 ] Applications such as pressure‐sensitive bedsheet,[ 348 ] gases sensing mask,[ 349 ] and touch and gesture sensors[ 350 ] have been well demonstrated, indicating the reliability of TENGs as self‐powered textiles/garments with active responses to human body and environment. However, in view of manufacture feasibility and practicability of fiber/fabric‐based TENGs, important concerns should be considered, such as good woven properties of fibers/yarns TENGs, favorable air‐permeability, skin‐affinity and washability of fabrics/textile TENGs, which are important properties for improving the human perception, ensuring safe and friendly interactions with soft robots. A few typical studies have been exploited to conceive these challenges for long‐term vision.
Small size, favorable softness, and good mechanical properties are important features for fiber/yarn TENG, ensuring the weaving operation. Recently, utilizing a continuous electrospinning technology, Ma et al. realized large‐scale manufacture of core–shell fine yarns (diameter ≈350.66 µm) that consisted of PVDF/PAN hybrid nanofibers (shell) and sliver yarns (core), which shows high triboelectric output (Figure 18e).[ 328 ] It renders facile weaving process to produce triboelectric textile, a typical textile TENG delivers electrical outputs of 40.8 V, 0.705 µA cm−2, and 9.513 nC cm−2 under pressure of 5 N with 2.5 Hz, showing high sensitivity for monitoring subtle contacts from humans and insects. More interestingly, the variation in electron affinity energies allow the triboelectric yarns to identify textile materials, such as fabrics of cotton, silk, viscose, nylon, PET, and PET/PU. Good properties of triboelectric yarns render which can be facilely woven or knitted into triboelectric fabrics/textiles with wider applications. Fan et al. proved a washable all‐textile sensor with full cardigan stitch texture, rendering enhanced triboelectric interaction between Nylon yarn and stainless steel yarn. The sensor can be stitched into garments for simultaneously monitoring of arterial pulse waves and respiratory signals, demonstrating an intriguing wireless mobile health monitoring system for noninvasive assessment of cardiovascular disease and sleep apnea syndrome (Figure 18f).[ 329 ] To improve the reliable power density and sensitivity of textile for both voluntary and involuntary contacts with human skin, Xiong et al. developed a skin‐actuated washable all‐textile‐TENG, a unique hydrophobic cellulose oleoyl ester nanoparticles (HCOENPs)‐coating was applied to encapsulate the precoated black phosphorus (BP) layer on a PET textile for alleviating degradation, together with a permeable textile electrode and a waterproof textile to configurate a sandwiched TENG (Figure 18g).[ 330 ] Due to the high charge induction of HCOENPs as well as the enhanced electrons trapping capability by BP layer below, the textile‐TENG exhibits ultrahigh output voltage (≈880 V) and stable electricity performance regardless of various mechanical deformations, severe washing, and long‐term exposure (4 months) to ambient condition. It was an unprecedented demonstration to enhance the triboelectric output of textile but maintain its breathability and washability, highly suitable for daily interaction with human skin for power generation and self‐powered sensing.
Water is an inexhaustible source distributed everywhere around us, capable of contributing mechanical energy and electrostatic energy to trigger TENGs,[ 351 , 352 , 353 , 354 ] but also carry moisture with sensitive negative effect to suppress the triboelectric output. Thus, Xiong et al. proposed the first all‐fabric TENG to screen the moisture/wetting effect for water energy harvesting. The fabric was treated by the HCOENPs nanocoating to construct a dual‐mode fabric‐TENG, exhibiting excellent self‐cleaning and anti‐biofouling performances, enabling both electrostatic energy and mechanical energy scavenging from kinetic water, generating maximum electricity of 22 V and 8 µA with a 3 cm × 3 cm device. The all‐fabric TENG can be facilely designed as a wristband or be incorporated into cotton glove for on‐demand water energy harvesting to drive the commercial electronics (Figure 18h).[ 331 ] This eco‐friendly hydrophobic nanocoating technique renders great potential for ordinary textiles such as cotton, silk, flax, etc., for self‐powered applications in water condition, opening up a new consideration of wearable electronics to resist the moisture effect for outdoors applications. Therefore, piezoelectric or triboelectric textiles exhibit great role in wearable power sources and self‐powered sensing, promising for robot manipulation assisting and human–robot interaction. In addition, utilizing electrochemical mechanism, Kim et al. managed to convert tensile or torsional mechanical energy of yarns into electrical energy without external bias voltage.[ 355 ] 41.2 J kg−1 electrical energy can be generated per mechanical stretching cycle, the maximum electrical power of 250 W kg−1 was achieved when stretching the coiled yarns with 30 Hz. This yarn‐twisting energy harvester promises to harvest ocean wave energy, showing an alternate self‐powered technique for yarns apart from the thermoelectric generator and piezo‐/triboelectric nanogenerators.
5.4. Photovoltaic Self‐Powered Fibers/Fabrics
In addition to the energy sources from human body and water around, fibers/fabrics also are capable of scavenging energy from environment, such as solar irradiance. Tremendous efforts have been made to develop the photovoltaic self‐powered fibers/fabrics.[ 356 , 357 ] It provides additional energy source for wearables, especially for the soft robots which would operate individually or perform task remotely. Here we summarize the fibers/fabrics solar cells with representative fabrication methods, combinations, and adaptabilities to various extreme conditions.
Chen et al. reported a solar cell firstly based on the highly aligned nanotubes (CNTs) fiber, this 1D solar cell allows energy conversion to the light from all directions, showing power conversion efficiency of ≈2.6%.[ 358 ] As wearable application ultimately requires device in forms of fabric or textile that have higher integrability and conversion efficiency, Lee et al. developed a textile battery by coating method as shown in Figure 19a with encapsulation by a battery pouch, an additional thin film solar cell was incorporated onto the pouch, enabling a flexible battery chargeable by solar energy.[ 359 ] However, this textile device is not permeable due to the pouch and the additional solar cells coverage. Pan et al. proposed a textile dye‐sensitized solar cell (DSC) by stacking electrodes with liquid or solid electrolyte (Figure 19b).[ 360 ] Typically, titanium textile grown with aligned TiO2 nanotubes as working electrode, stacking with a CNT fiber textile as the counter electrode, which was obtained from twisting of CNT films that consisted of the aligned CTN sheets by spinnable pulling process. Compared to the 1D fiber solar cell, this stacked textile DSC shows superior energy conversion efficiency (≈3.67%) due to its woven structure independent of the angle of incident light.
Figure 19.
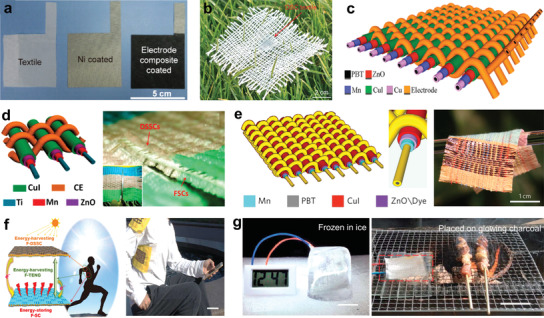
Photovoltaic self‐powered fibers/fabrics. a) A textile battery covered with film solar cell. Reproduced with permission.[ 359 ] Copyright 2013, American Chemical Society. b) Wearable solar cell by stacking CNT‐textile electrode. Reproduced with permission.[ 360 ] Copyright 2014, Wiley‐VCH. c) A colorful all‐solid woven textile solar cell. Reproduced with permission.[ 361 ] Copyright 2016, Wiley‐VCH. d) A tailorable all‐solid power solar cell textile integrated with fiber supercapacitors. Reproduced with permission.[ 362 ] Copyright 2016, American Chemical Society. e) A microcable hybrid textile for simultaneous solar and mechanical energy harvesting. Reproduced with permission.[ 363 ] Copyright 2016, Springer Nature. f) A self‐powered fabric integrated with a TENG, solar cells, and supercapacitors. Reproduced with permission.[ 364 ] Copyright 2020, The Authors, published by The American Association for the Advancement of Science (AAAS). Reprinted/adapted from ref. [ 364 ]. © The Authors, some rights reserved; exclusive licensee American Association for the Advancement of Science. Distributed under a Creative Commons Attribution NonCommercial License 4.0 (CC BY‐NC) http://creativecommons.org/licenses/by‐nc/4.0/. g) A solar cell textile with stability at a working temperature range of −40 to 160 °C. Reproduced with permission.[ 366 ] Copyright 2016, Royal Society of Chemistry.
For consideration of practical applications, Zhang et al. demonstrated a colorful all‐solid textile solar cell by weaving method, 1.3% efficiency for a single cell unit was achieved (Figure 19c).[ 361 ] A lot of efforts were made in incorporating the energy harvesting and storage modules as multifunctional hybrid photovoltaic fabrics/textiles, achieving sustainable power systems. For example, by interlocking the fiber‐shaped photoanodes and counter electrodes, Chai et al. presented a tailorable all‐solid power DSC textile with integration of fiber supercapacitor, promising a scalable production technique of self‐powered textile for both solar energy harvesting and storage (Figure 19d).[ 362 ] In addition, energy harvesting techniques were also pursued as effective combinations to enhance the harnessing efficiency of various energy. Chen et al. proposed an unique micro‐cable hybrid textile for simultaneous solar and mechanical energy harvesting (Figure 19e).[ 363 ] A power textile (4 cm by 5 cm) with electricity output from both energy can continuously drive a digital watch, directly charge a cell phone and trigger water splitting, allowing more choices for energy requirement during daylight and night. Moreover, Wen et al. demonstrated a self‐powered fabric integrated with TENG, solar cells, and supercapacitors (Figure 19f),[ 364 ] rending electricity energy harvest from human motions and outdoor solar irradiances and storage as chemical energy for timely usages, showing a high integrability with textiles and garments. Considering the outdoor applications of the photovoltaic fabrics/textiles, washing stability,[ 365 ] and reliabilities of textile solar cells at freezing (−40 °C) and high‐temperature conditions (160 °C)[ 366 ] were also studied by Jinno et al. and Xu et al. (Figure 19g), promising the self‐powered operations of wearables or robotic fabrics/textiles under harsh environments.
In short, the abovementioned self‐powered fabrics/textiles can generate electricity converting from human metabolites, human body heat, human motions, mechanical impacting/vibrations around, and water (liquid) as well as sunshine from environment, capable of adapting various harsh conditions for extended application scenes. So far, self‐powered fibers/fabrics could serve as wearable power sources to drive some micro‐ or portable electronics, avoid the presence of power sources and the frequently charging/discharging, reducing the burden for human. Meanwhile, these fibers/fabrics allow self‐powered sensors for human motion detection and noninvasive health monitoring, and sensing for robots to provide the feedback‐control and enhance the operation accuracy or remote manipulation. For robotic fibers/fabrics, currently some of them have been designed for self‐responsive actuation systems to the other stimuli such as thermal, light, moisture, magnetic field, etc., as summarized above. In contrast, electrical stimulus is the most accurate control for robotic system operation, although there is no report about using the power of fabrics/textiles via interaction with human body to trigger the corresponding actuations of smart responsive garments or robots, some interesting examples of self‐powered actuators by triboelectric effect have been demonstrated to uncover the possibility, such as micro actuator for optical modulation,[ 367 ] dielectric elastomer actuator with tunable optical properties,[ 368 ] elastomeric optical grating modulator,[ 369 ] cantilever system,[ 370 ] gripper as well as microfluidic transport system,[ 371 , 372 ] exhibiting important applications for self‐powered micro electromechanical system. Therefore, we envision that it is possible to further improve the self‐powered efficiency of fibers/fabrics, which is not only capable of driving the wearable sensors and microelectronics, but also improving the electrical manipulation degree for the future fiber/fabric‐based human–robot interfaces and self‐managing robotic systems.
6. Fiber‐Robots for Biomedical Applications in Vivo
In addition to human–robot interacted applications of fibers and fabrics for wearables and soft robotics in vitro, 1D materials of fibers or yarns also exhibit exciting potential as soft robots for biomedical application in vivo, showing a bright prospect for the traditional textile engineering community.[ 373 ] For example, a continuum fiber‐robot which can be delivered to the targeted nidus for on‐site detecting and on‐demand therapy, exhibiting great significance for realizing minimal invasive or noninvasive surgery. Chautems et al. reported a magnetic continuum fiber device with variable stiffness, which was fabricated based on an ultrafine silicone tube, assembling with low melting point alloy (LMPA) and heaters inside, spacers were applied to separate the inside components as segments to enhance flexibility and operability (Figure 20a).[ 374 ] Each segment can be independently softened by electrical current to realize controllable softness and freedom of actuations, rendering the fiber‐robot remotely navigated by magnetite. A minimum fiber‐robot with diameter of 2.33 mm was demonstrated for several therapeutic scenarios such as radio‐frequency cardiac ablations and interventional endoscopy in the gastrointestinal tract, showing high degrees of freedom with minimal invasive surgery.
Figure 20.
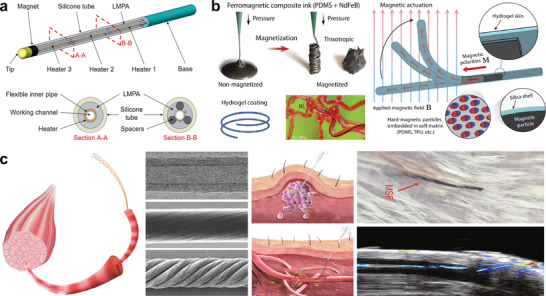
Fiber‐robots for biomedical applications in vivo. a) A magnetite remotely navigable multisegmented continuum fiber robot with controllable softness. Reproduced under the terms of the CC‐BY Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0/).[ 374 ] Copyright 2019, The Authors, published by Wiley‐VCH. b) Hydrogel skin enabled self‐lubricating ferromagnetic fiber‐robot. Reproduced with permission.[ 375 ] Copyright 2019, The Authors, published by The American Association for the Advancement of Science (AAAS). c) An injectable helical‐CNTs‐yarn electrochemical sensor for multiple disease biomarkers monitoring in vivo. Reproduced with permission.[ 376 ] Copyright 2019, Springer Nature.
To further reduce the diameters of the soft continuum robots with more flexible manipulations and overcome the friction issues of robots with surrounding environments (e.g., vessels) during navigation, Kim et al. developed a submillimeter‐scale, self‐lubricating ferromagnetic fiber‐robot, exhibiting capabilities to be omnidirectionally steered and navigated by magnetite (Figure 20b).[ 375 ] Specifically, a kind of hard magnetic material of neodymium–iron–boron (NdFeB) microparticles with high coercivity can be magnetically saturated to maintain high remnant magnetization against the external force, which was mixed with soft polymer matrixes such as polydimethylsiloxane (PDMS) or thermoplastic polyurethane (TPU) to obtain the ferromagnetic composite ink. A strong impulse of magnetic fields was applied to magnetically saturate the dispersed NdFeB particles to change the freely flowing ink into a thixotropic paste with high formability. Accordingly, the ink could be extruded through a micronozzle by pressure via printing or injection molding, forming the magnetic fiber after solvent evaporation or thermal curing, followed by grafted‐coating a cross‐linked hydrophilic polymer of polydimethylacrylamide (PDMAA) as hydrogel skin, resulting in the soft continuum robot. This fiber‐robot consisted of uniformly dispersed ferromagnetic microparticles in a soft polymer matrix shows advantages of miniaturization and lower surface friction, capable of navigating through a simulated tortuous cerebrovascular phantom with multiple aneurysms, enabling steerable laser delivery for targeted therapy which is a promising way to minimally invasive robotic surgery and healthcare.
Besides the precise manipulation and navigation of the fiber‐robots in vivo, the tools carried or functions realized on‐site are of great significance to enrich the applicability of the robots. An attractive example of versatile helical‐yarns of carbon nanotubes (CNTs) as electrochemical sensors was demonstrated by Wang et al. to monitor multiple disease biomarkers in vivo (Figure 20c).[ 376 ] CNTs synthesized by chemical vapor deposition were twisting into mechanically compliant helical bundles (yarns) to mimic the hierarchical structure of muscle. The yarn can be delivered into the blood vessels and vulnerable tissues such as tumors or the pig brain, but one end of the yarn remained outside the tissue for convenient external connection. It is highly compliant with low deforming stiffness which would not damage the surrounding tissues, suitable as implantable electronics for health monitoring. By tailoring four kinds of electrochemical sensors based on the CNT yarns, the sensors can be implanted in tumors in mice to spatially resolve and monitor H2O2. Integrated with a wireless transmission system as an adhesive skin path, sensors are capable of monitoring calcium ions and glucose in the venous blood of cats for 28 d. Delicate combination of these biofunctional fibers/yarns and the accurate manipulations of fiber‐robots in vivo promise targeted implantable electronics for tools delivery and minimal/noninvasive surgery.
In general, for biomedical application, developing the fiber/fabric‐based soft robotics integrated with sensing functions as tools for diagnosis and therapy in vitro or in vivo is needed, especially the latter which is not easily accessible by the traditional items. The applications could cover drug delivery, smart diagnosis and target therapy. Excellent achievements of fiber/yarn‐based 1D devices such as energy harvesters, self‐powered sensors, electrochemical sensors, and wireless transmit networks are demonstrated, capable of highly enriching the functions of soft continuum robots in vivo. Of course, many challenges still existed in this emerging field. We envision that multiple factors have to be considered, such as materials should be biocompatible with biological body, device design should be allowed for the implantation process,[ 377 , 378 , 379 , 380 , 381 , 382 , 383 , 384 ] such as magnetic steering and injection. Besides, adaptivity and stability of the robots required to be good enough for real‐time and long‐term monitoring. For some special cases which only require a certain time of monitoring or transient therapy, biodegradable devices may play important role, executing the appointed tasks and degrade subsequently without toxic and side effects generation.[ 385 , 386 , 387 , 388 , 389 ]
7. Challenge of Fiber/Fabric‐Based Wearables and Robotics
In summary, active functions such as actuation, sensing, and power source are expected to be endowed on the conventional fibers/yarns and fabrics/textiles by reasonable functionalization, exhibiting great potentials for soft robots, wearable electronics, human–robot interaction, and biomedical diagnosis and therapy. By integrating the actuation and sensing functions, preliminary robotic fibers/fabrics could be realized with responses to the external stimuli such as electricity, heat, light, moisture, magnetic field, etc., realizing perceptive soft robots, remote manipulators, and intelligently regulated clothes adaptive to the wear feelings. Energy harvesting ability of fibers/fabrics from human body or environment around enables various self‐powered sensors for wearables and promises self‐managing robotic systems. Moreover, biomedical fiber‐robots emerged to be precisely navigated in vivo across the complex and incommodious scenes of nidus, showing excited potential for drug delivery, smart diagnosis, and target therapy. In addition, functions such as camouflage, display, data storage/processing, and sensorimotor nervous system integration are also important for enriching the robotic system and wearables, which rely on the developments of fibers/fabrics‐based devices with performances such as color changes (structural coloration,[ 28 , 29 ] electroluminescence,[ 30 , 31 , 32 , 33 ] light‐emitting electrochemical cells,[ 34 ] and organic light‐emitting devices,[ 35 ] memories and artificial synapses,[ 36 ] mimicking biological synapses in the human sensorimotor nervous system to realize the autonomous and intelligent robotics and wearables. At present, a lot of challenges associated with device design and integration as well as safety concerns remained, impeding their practical implementations.[ 390 , 391 ] Here we envision a few challenges and solutions for future development of robotic and wearable fibers/fabrics. It includes compatibility between fabric/textile‐devices with human skin, connection between devices and textile substrates, attachment between devices and skin, and wireless sensors network integration, autonomous and intelligent fiber robot, as well as the relationship between actuators, power sources and sensors based on fibers/fabrics.
7.1. Skin Affinity of Fabric/Textile
As substrates of the wearable devices, fibers/fabrics required frequent contact with human skin. Majority of the fabrics/textiles are compatible with human skin, especially natural fibers woven textiles, such as cotton, silk, flax, etc., which commonly show unilateral good affinity with human body. However, the affinity of fabric/textile additionally depends on skin hydration. As revealed by Gerhardt et al., moisture and liquids at the skin‐textile interface would increase the friction and shear interaction, often cause discomfort feeling for human, and even lead to severe skin irritations, mechanical trauma and wounds.[ 392 ] It is an important concern for designing the fabric/textile‐based wearable devices or soft robotics for human–machine interfaces. To precisely monitoring the skin hydration, Yokus et al. proposed a design of a capacitive hydration sensor for integration with textile electronics (Figure 21a),[ 393 ] capable of monitoring the moisture microenvironment between robotic fabric/textile and human body for improving human perception and feeling.
Figure 21.
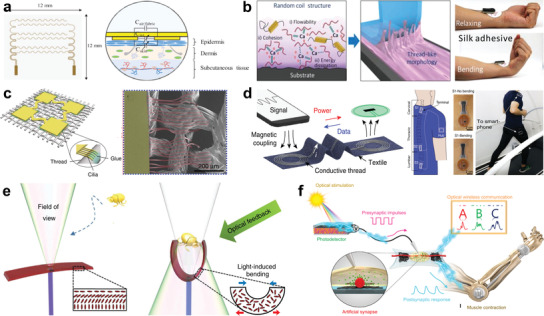
Challenge of fibers/fabrics for wearables and soft robotics. a) A simulation method for designing a capacitive hydration sensor incorporable with textile. Reproduced with permission.[ 393 ] Copyright 2016, Cambridge University Press. b) A calcium‐modified silk fibroin strong adhesive for enhancing interfacial stability between device and skin. Reproduced with permission.[ 394 ] Copyright 2018, Wiley‐VCH. c) An artificial cilia‐assisted transfer technique to adhere devices onto textile. Reproduced under the terms of the CC‐BY Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0/).[ 395 ] Copyright 2016, The Authors, published by Springer Nature. d) A battery‐free NFC clothing with body sensor network for wireless power and data connectivity around the human body. Reproduced under the terms of the CC‐BY Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0/).[ 396 ] Copyright 2016, The Authors, published by Springer Nature. e) A self‐regulated light‐driven artificial flytrap. Reproduced under the terms of the CC‐BY Creative Commons Attribution 4.0 International License (https://creativecommons.org/licenses/by/4.0/).[ 397 ] Copyright 2017, The Authors, published by Springer Nature. f) A reflex like sensorimotor nervous synapse. Reproduced with permission.[ 398 ] Copyright 2018, The Authors, published by American Association for the Advancement of Science (AAAS). Reprinted/adapted from ref. [ 398 ]. © The Authors, some rights reserved; exclusive licensee American Association for the Advancement of Science. Distributed under a Creative Commons Attribution NonCommercial License 4.0 (CC BY‐NC) http://creativecommons.org/licenses/by‐nc/4.0/.
In addition, adhesion and biocompatibility between wearable devices and biological surface (e.g., human skin) are important to ensure the stable electrical signals under various mechanical deformations during exercises. Seo et al. applied calcium (Ca) ions to improve the mechanical interlocking of silk fibroin, developing a strong adhesive for enhancing the interfacial stability of the device with skin. Therefore, wearable devices including capacitive sensor, piezoresistive strain sensor, ECG sensor, and hydrogel‐based drug delivery were realized with reliable performances on skin even under frequent deformations (Figure 21b).[ 394 ] This adhesive hydrogel with good reusability, biocompatibility and acceptable conductivity, is a good candidate for well incorporation of wearable sensors with human skin and soft robots.
Some of the individual wearable devices are not allowed to be directly fabricated on the complex surface of fabrics/textiles, hampering certain special functions realized on textile for wearable applications. Yoon et al. proposed an innovative artificial cilia‐assisted transfer printing technique to overcome this issue (Figure 21c),[ 395 ] which was introduced in the periphery of flexible electronic devices as adhesive elements, not only conformally wrap the surfaces with arbitrary complex shapes, but also confine a small amount of glue (e. g. PDMS) for releasing mechanical stress from various mechanical deformations. It is proved an effective way to conformally transfer devices on a textile, maintaining reliable electronic performance regardless of various mechanical deformations, daily wearing and washing.
7.2. Integration of Wearable Sensors Network
Seamless integration of sensors and smart responsive devices as functional networks onto human body provides convenient operations in health monitoring, human–machine interfaces, and biomedical diagnosis.[ 399 , 400 , 401 , 402 , 403 , 404 ] Compared with the traditional wiring integration with poor monitoring continuity and hampered physical activity,[ 405 ] wireless networks strategy exhibits advantages in integrating the discrete devices with improved wearability, realizing robotic textiles/garments for multifunctional and long‐term health monitoring in real time.[ 406 , 407 , 408 , 409 ]
Near‐field communication (NFC) as a kind of highly safe communication protocol allowing electronic devices communicating with each other within a few centimeters by electromagnetic waves transmission, enabling battery‐free, low‐cost, and secure devices against intercepting, has great potential for wireless body sensor networks.[ 410 ] Lin et al. integrated conductive threads as near‐filed‐responsive inductor patterns onto daily garment by computer‐controlled embroidery technique, showing a battery‐free NFC clothing competent in wireless communication between multiple sensors and a reader up to a meter around human body, which was demonstrated for spinal posture monitoring and continuous recording of temperature and gait during exercise (Figure 21d).[ 396 ] To further improve the transmission safety with lower‐energy consuming, Tian et al. designed a clothing with metal fabric patterns, enabling surface‐plasmon‐like modes at radio communication frequencies to allow propagation of radio‐waves around the body, showing an energy‐efficient and secure wireless interconnected body sensor network for power transfer and touch sensing.[ 411 ] Wireless connections between devices placed near metal textiles was demonstrated through the surface waves propagation instead of wireless signals radiating, enabling enhanced transmission efficiency by three orders of magnitude (>30 dB) compared to traditional radiative networks. It proposes a daily wearable metal textile as highly efficient and inherently secure personal sensor networks for continuous health monitoring and reliable human–robot interaction.
7.3. Challenges of Autonomous and Intelligent Fiber Robot
Inspired by the living organisms, fiber robot that self‐regulates, autonomous and intelligent excites a great deal of interests.[ 412 ] Constructing an intelligent fiber system remains among the grand challenges and only recently several related research are reported. An autonomous fiber actuator is able to reversibly transduce external constant stimulus into sustainable, periodic mechanical actuation without human intervention, such as the aforementioned self‐locomotive hygrobot.[ 121 ] Among the stimulus‐responsive fiber actuators, the most significant examples of self‐regulation are reported by using light‐actuated liquid crystal, through self‐shadowing‐enabled negative feedback loop. Based on this property, light‐fueled freestyle self‐oscillators and self‐sustained soft phototactic swimmer were demonstrated.[ 93 , 413 ] One impressive example is the artificial Flytrap as shown in Figure 21e.[ 397 ] The LC was attached to the tip of an optical fiber, which exhibits autonomous fast closure action to catch an approaching object because the light was reflected back to the LC. And it can distinguish between different micro‐targets by sensing their reflectance feedback properties. However, the self‐regulation light actuator is limited in complex 3D system and unstructured environment, because the light propagates in straight line and easily be shadowed. Recently, the autonomous and intelligent pneumatic soft robots are reported, such as the soft ring oscillator and autonomous octobot.[ 414 , 415 ] But it is not easy to construct such complex pneumatic structure in a long homogeneous fiber. Many efforts are needed to optimize the self‐regulation and oscillation structure and materials design, and finally achieve the self‐powered and self‐sustainable autonomous fiber robot.
Besides, structural embedded logic in stimulus‐responsive materials is still at the infancy of exploration toward complex mechanical computation, reflex and intelligent. Multistable structure and multiresponsive materials are the most common strategies to achieve structure logic, such as the example in figure 6d.[ 122 ] In addition, Lee et al. reported a reflex like sensorimotor nervous systems, as shown in Figure 21f.[ 416 ] The self‐powered photodetector generated a pulsed voltage triggered by optical signals, which gated a stretchable organic nanowire synaptic transistor, and controlled an artificial muscle fiber contracts. This work showed the possibility to integrate more complex sensor–processer–actuator fiber system. Such intelligent fiber system can distinguish multiple signal from different fiber sensors and process the signal with the embodied computational methods to make appropriate decisions and actuation response. This complex system hybridizes different kinds of signal and stimuli, the signal transduction and energy transformation are very challenging. Nevertheless, it holds great promise to achieving autonomous and intelligent fiber robots for future development of soft robotics, neurorobotics, and intriguing wearables for human–robot interfaces.
7.4. Correlation Building between Fiber/Fabric with Human Body and Environments
Figure 22 proposes a relationship representation for fibers/fabrics application in actuators, sensors, and power sources, which perform with different responses and functions to the external stimuli including electricity, heat, light, solvent, and vapor condition, magnetic, and pneumatic. First, actuations of fibers/fabrics can be realized relying on single or multiple stimuli above through different designs. In comparison, electrical actuations have more accurate operations and controllability. Fibers/fabrics sensors normally could response to mechanical deformation, temperature change, humidity variation, solvent/metabolite or optical stimuli, etc., they could assist the actuators operations and use for healthcare monitoring, but the detections usually rely on an additional electrical power, which increase the difficulty of system integration. Energy harvesting ability of fibers and fabrics from thermal conduction, mechanical motions, water, solar irradiance, etc., could be an effective way to provide power for both actuators and sensors, achieving certain self‐powered fiber/fabric electronics, improving the system integration. It requires that the fibers/fabrics possess high power density in energy harvesting and storage. Hybrid devices which could scavenge energy from multiple stimuli and store in capacitors or batteries for on‐demand usages, would be a more effective way to power the sensor and assist the actuators. Sensors with multiresponsive capabilities for various stimuli are required to improve the accuracy of feedback‐control for actuators. In the form of fibers or fabrics, actuators often encounter challenges in the limited displacement and force, but show good comfort and safety for human–robot interfaces. Especially it promises as threadlike robots across the complex scenes in‐vivo for biomedical applications, such as target diagnosis and therapy.
Figure 22.
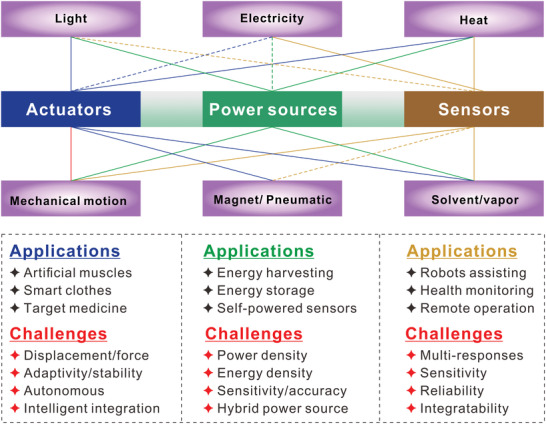
Relationship map of stimuli from human body or surrounding environments for fibers/fabrics application in actuators, sensors, and power sources. Blue lines indicate the actuators could be driven by the corresponding stimuli. Yellow lines mean the sensors could detect the corresponding stimuli. Green lines indicate fibers/fabrics generators could harvest energy from the related stimuli. The dashed lines suggest the relationships that are yet not been well built based on fibers/fabrics.
In a nutshell, integration of fiber/fabric‐based devices of actuators, sensors, and power sources, or integrating the enriching multifunctions such as displays and sensorimotor information communications in a same fiber or fabric as all‐in‐one robot or wearable is highly desirable and yet challenging. In this realm, intensive efforts combining material, chemical, electrical and textile engineering techniques are being pursued. It is envisaged that the robotic fibers or fabrics in the near future can be rollable, and customized with active origami capability, providing daily services like the conventional static fibers and textiles. It is time that the most common fibers/fabrics accompanying human for thousands of years to embrace regenerated new activities for the soft robots, wearable electronics, and human–robot interfaces.
Conflict of Interest
The authors declare no conflict of interest.
Acknowledgements
J.X., J.C., and P.S.L. contributed equally to this work. This work was supported by the National Research Foundation Investigatorship (NRF‐NRFI201605) and the Competitive Research Programme (NRF‐CRP13‐2014‐02) under the National Research Foundation, Prime Minister's Office, Singapore.
Biographies
Jiaqing Xiong received his Ph.D. from Soochow University in 2015. He is now a Senior Research Fellow in the School of Materials Science and Engineering, Nanyang Technological University. His research focuses on smart fibers/textiles, flexible electronics, wearables, and bioelectronics for self‐powered systems and soft robotics.

Jian Chen received his B.S. degree from Central South University in 2014, and his Ph.D. degree in condensed matter physics from University of Chinese Academy of Sciences in 2019. Now he is a Research Fellow in Nanyang Technological University. His research interests include triboelectric nanogenerators, self‐powered systems, and soft robotics.
Pooi See Lee received her Ph.D. from National University of Singapore in 2002. She joined the School of Materials Science and Engineering, Nanyang Technological University as an Assistant Professor in 2004. She was promoted to tenured Associate Professor in 2009 and Full Professor in 2015. Her research focuses on nanomaterials for energy and electronics, flexible and stretchable devices, human–machine interface, and functional materials for soft robotics.

Xiong J., Chen J., Lee P. S., Functional Fibers and Fabrics for Soft Robotics, Wearables, and Human–Robot Interface. Adv. Mater. 2021, 33, 2002640. 10.1002/adma.202002640
References
- 1. Gries T., Raina M., Quadflieg T., Stolyarov O., Textile Fibre Composites in Civil Engineering, Elsevier, Amsterdam, The Netherlands: 2016, p. 3. [Google Scholar]
- 2. Vigo T. L., Textile Processing and Properties: Preparation, Dyeing, Finishing and Performance, Vol. 11, Elsevier, Amsterdam, The Netherlands: 2013. [Google Scholar]
- 3. Zeng W., Shu L., Li Q., Chen S., Wang F., Tao X. M., Adv. Mater. 2014, 26, 5310. [DOI] [PubMed] [Google Scholar]
- 4. Weng W., Chen P., He S., Sun X., Peng H., Angew. Chem., Int. Ed. 2016, 55, 6140. [DOI] [PubMed] [Google Scholar]
- 5. Jost K., Dion G., Gogotsi Y., J. Mater. Chem. A 2014, 2, 10776. [Google Scholar]
- 6. Rus D., Tolley M. T., Nature 2015, 521, 467. [DOI] [PubMed] [Google Scholar]
- 7. Rich S. I., Wood R. J., Majidi C., Nat. Electron. 2018, 1, 102. [Google Scholar]
- 8. Wallin T. J., Pikul J., Shepherd R. F., Nat. Rev. Mater. 2018, 3, 84. [Google Scholar]
- 9. Erol O., Pantula A., Liu W., Gracias D. H., Adv. Mater. Technol. 2019, 4, 1900043. [Google Scholar]
- 10. Polygerinos P., Correll N., Morin S. A., Mosadegh B., Onal C. D., Petersen K., Cianchetti M., Tolley M. T., Shepherd R. F., Adv. Eng. Mater. 2017, 19, 1700016. [Google Scholar]
- 11. Whitesides G. M., Angew. Chem., Int. Ed. 2018, 57, 4258. [DOI] [PubMed] [Google Scholar]
- 12. Schmitt F., Piccin O., Barbé L., Bayle B., Front. Rob. AI 2018, 5, 84. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 13. Rishani N., Elayan H., Shubair R., Kiourti A., arXiv:1810.00321, 2018.
- 14. Aliev A. E., Oh J., Kozlov M. E., Kuznetsov A. A., Fang S., Fonseca A. F., Ovalle R., Lima M. D., Haque M. H., Gartstein Y. N., Science 2009, 323, 1575. [DOI] [PubMed] [Google Scholar]
- 15. Stoychev G. V., Ionov L., ACS Appl. Mater. Interfaces 2016, 8, 24281. [DOI] [PubMed] [Google Scholar]
- 16. Amjadi M., Kyung K.‐U., Park I., Sitti M., Adv. Funct. Mater. 2016, 26, 1678. [Google Scholar]
- 17. Zeng W., Shu L., Li Q., Chen S., Wang F., Tao X. M., Adv. Mater. 2014, 26, 5310. [DOI] [PubMed] [Google Scholar]
- 18. Kwon C. H., Ko Y., Shin D., Kwon M., Park J., Bae W. K., Lee S. W., Cho J., Nat. Commun. 2018, 9, 4479. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 19. Dong K., Peng X., Wang Z. L., Adv. Mater. 2019, 0, 1902549. [DOI] [PubMed] [Google Scholar]
- 20. Yu D., Goh K., Wang H., Wei L., Jiang W., Zhang Q., Dai L., Chen Y., Nat. Nanotechnol. 2014, 9, 555. [DOI] [PubMed] [Google Scholar]
- 21. Zhang Z., Yang Z., Wu Z., Guan G., Pan S., Zhang Y., Li H., Deng J., Sun B., Peng H., Adv. Energy Mater. 2014, 4, 1301750. [Google Scholar]
- 22. Gao Z., Bumgardner C., Song N., Zhang Y., Li J., Li X., Nat. Commun. 2016, 7, 11586. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 23. Huang Y., Ip W. S., Lau Y. Y., Sun J., Zeng J., Yeung N. S. S., Ng W. S., Li H., Pei Z., Xue Q., Wang Y., Yu J., Hu H., Zhi C., ACS Nano 2017, 11, 8953. [DOI] [PubMed] [Google Scholar]
- 24. Xu S., Yao Y., Guo Y., Zeng X., Lacey S. D., Song H., Chen C., Li Y., Dai J., Wang Y., Chen Y., Liu B., Fu K., Amine K., Lu J., Hu L., Adv. Mater. 2018, 30, 1704907. [DOI] [PubMed] [Google Scholar]
- 25. Pu X., Song W., Liu M., Sun C., Du C., Jiang C., Huang X., Zou D., Hu W., Wang Z. L., Adv. Mater. 2016, 28, 98. [DOI] [PubMed] [Google Scholar]
- 26. Pu X., Li L., Liu M., Jiang C., Du C., Zhao Z., Hu W., Wang Z. L., Adv. Mater. 2016, 28, 98. [DOI] [PubMed] [Google Scholar]
- 27. Pu X., Li L., Song H., Du C., Zhao Z., Jiang C., Cao G., Hu W., Wang Z. L., Adv. Mater. 2015, 27, 2472. [DOI] [PubMed] [Google Scholar]
- 28. Li Q., Zhang Y., Shi L., Qiu H., Zhang S., Qi N., Hu J., Yuan W., Zhang X., Zhang K. Q., ACS Nano 2018, 12, 3095. [DOI] [PubMed] [Google Scholar]
- 29. Yuan W., Li Q., Zhou N., Zhang S., Ding C., Shi L., Zhang K. Q., ACS Appl. Mater. Interfaces 2019, 11, 19388. [DOI] [PubMed] [Google Scholar]
- 30. Zhang Z., Cui L., Shi X., Tian X., Wang D., Gu C., Chen E., Cheng X., Xu Y., Hu Y., Zhang J., Zhou L., Fong H. H., Ma P., Jiang G., Sun X., Zhang B., Peng H., Adv. Mater. 2018, 30, 1800323. [DOI] [PubMed] [Google Scholar]
- 31. Park H. J., Kim S., Lee J. H., Kim H. T., Seung W., Son Y., Kim T. Y., Khan U., Park N. M., Kim S. W., ACS Appl. Mater. Interfaces 2019, 11, 5200. [DOI] [PubMed] [Google Scholar]
- 32. Kwon S., Hwang Y. H., Nam M., Chae H., Lee H. S., Jeon Y., Lee S., Kim C. Y., Choi S., Jeong E. G., Choi K. C., Adv. Mater. 2020, 32, 1903488. [DOI] [PubMed] [Google Scholar]
- 33. Wu Y., Mechael S. S., Lerma C., Carmichael R. S., Carmichael T. B., Matter 2020, 2, 882. [Google Scholar]
- 34. Zhang Z., Guo K., Li Y., Li X., Guan G., Li H., Luo Y., Zhao F., Zhang Q., Wei B., Pei Q., Peng H., Nat. Photonics 2015, 9, 223. [Google Scholar]
- 35. Choi S., Kwon S., Kim H., Kim W., Kwon J. H., Lim M. S., Lee H. S., Choi K. C., Sci. Rep. 2017, 7, 6424. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 36. Xu W., Min S.‐Y., Hwang H., Lee T.‐W., Sci. Adv. 2016, 2, e1501326. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 37. Buckner T. L., Kramer‐Bottiglio R., Multifunct. Mater. 2018, 1, 012001. [Google Scholar]
- 38. Hu J., Meng H., Li G., Ibekwe S. I., Smart Mater. Struct. 2012, 21, 053001. [Google Scholar]
- 39. Weng W., Yang J., Zhang Y., Li Y., Yang S., Zhu L., Zhu M., Adv. Mater. 2020, 32, 1902301. [DOI] [PubMed] [Google Scholar]
- 40. Shi Q., Sun J., Hou C., Li Y., Zhang Q., Wang H., Adv. Fiber Mater. 2019, 1, 3. [Google Scholar]
- 41. Persson N.‐K., Martinez J. G., Zhong Y., Maziz A., Jager E. W. H., Adv. Mater. Technol. 2018, 3, 1700397. [Google Scholar]
- 42. Kongahage D., Foroughi J., Fibers 2019, 7, 21. [Google Scholar]
- 43. Alexander S. L. M., Matolyak L. E., Korley L. T. J., Macromol. Mater. Eng. 2017, 302, 1700133. [Google Scholar]
- 44. Aziz S., Spinks G. M., Mater. Horiz. 2020, 7, 667. [Google Scholar]
- 45. Haines C. S., Li N., Spinks G. M., Aliev A. E., Di J., Baughman R. H., Proc. Natl. Acad. Sci. USA 2016, 113, 11709. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 46. Lancia F., Ryabchun A., Katsonis N., Nat. Rev. Chem. 2019, 3, 536. [DOI] [PubMed] [Google Scholar]
- 47. Boczkowska A., Leonowicz M., Fibres Text. East. Eur. 2006, 14, 59. [Google Scholar]
- 48. Lendlein A., Gould O. E. C., Nat. Rev. Mater. 2019, 4, 116. [Google Scholar]
- 49. Dagdeviren C., Joe P., Tuzman O. L., Park K.‐I., Lee K. J., Shi Y., Huang Y., Rogers J. A., Extreme Mech. Lett. 2016, 9, 269. [Google Scholar]
- 50. Liu Y. Z., Hao Z. W., Yu J. X., Zhou X. R., Lee P. S., Sun Y., Mu Z. C., Zeng F. L., Smart Mater. Struct. 2019, 28, 055011. [Google Scholar]
- 51. Youn J.‐H., Jeong S. M., Hwang G., Kim H., Hyeon K., Park J., Kyung K.‐U., Appl. Sci. 2020, 10, 640. [Google Scholar]
- 52. Fook T. H. T., Jeon J. H., Lee P. S., Adv. Mater. Technol. 2020, 5, 1900762. [Google Scholar]
- 53. Wang J., Li S., Gao D., Xiong J., Lee P. S., NPG Asia Mater. 2019, 11. [Google Scholar]
- 54. Tan M. W. M., Thangavel G., Lee P. S., NPG Asia Mater. 2019, 11. [Google Scholar]
- 55. He Q., Wang Z., Wang Y., Minori A., Tolley M. T., Cai S., Sci. Adv. 2019, 5, eaax5746. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 56. Urbanski M., Reyes C. G., Noh J., Sharma A., Geng Y., Subba Rao Jampani V., Lagerwall J. P., J. Phys.: Condens. Matter. 2017, 29, 133003. [DOI] [PubMed] [Google Scholar]
- 57. Karothu D. P., Mahmoud Halabi J., Li L., Colin‐Molina A., Rodriguez‐Molina B., Naumov P., Adv. Mater. 2020, 32, 1906216. [DOI] [PubMed] [Google Scholar]
- 58. Darestani M., Locq J., Millar G. J., Sep. Sci. Technol. 2019, 54, 128. [Google Scholar]
- 59. Gao P., Li J., Shi Q., Adv. Fiber Mater. 2019, 1, 214. [Google Scholar]
- 60. Lamuta C., Messelot S., Tawfick S., Smart Mater. Struct. 2018, 27, 055018. [Google Scholar]
- 61. Karami F., Tadesse Y., Smart Mater. Struct. 2017, 26, 125010. [Google Scholar]
- 62. Charles N., Gazzola M., Mahadevan L., Phys. Rev. Lett. 2019, 123, 208003. [DOI] [PubMed] [Google Scholar]
- 63. Guo W., Liu C., Zhao F., Sun X., Yang Z., Chen T., Chen X., Qiu L., Hu X., Peng H., Adv. Mater. 2012, 24, 5379. [DOI] [PubMed] [Google Scholar]
- 64. Shafranek R. T., Millik S. C., Smith P. T., Lee C.‐U., Boydston A. J., Nelson A., Prog. Polym. Sci. 2019, 93, 36. [Google Scholar]
- 65. Wei M., Gao Y., Li X., Serpe M. J., Polym. Chem. 2017, 8, 127. [Google Scholar]
- 66. Pan C. L., Feng Z. H., Ma Y. T., Liu Y. B., Appl. Phys. Lett. 2008, 92, 012923. [Google Scholar]
- 67. Pan C. L., Ma Y. T., Liu Y. B., Zhang Q., Feng Z. H., Sens. Actuators, A 2008, 148, 250. [Google Scholar]
- 68. Khudiyev T., Clayton J., Levy E., Chocat N., Gumennik A., Stolyarov A. M., Joannopoulos J., Fink Y., Nat. Commun. 2017, 8, 1435. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 69. Egusa S., Wang Z., Chocat N., Ruff Z. M., Stolyarov A. M., Shemuly D., Sorin F., Rakich P. T., Joannopoulos J. D., Fink Y., Nat. Mater. 2010, 9, 643. [DOI] [PubMed] [Google Scholar]
- 70. Baumgartner R., Kogler A., Stadlbauer J. M., Foo C. C., Kaltseis R., Baumgartner M., Mao G., Keplinger C., Koh S. J. A., Arnold N., Suo Z., Kaltenbrunner M., Bauer S., Adv. Sci. 2020, 7, 1903391. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 71. Li Y., Guo M., Li Y., J. Mater. Chem. C 2019, 7, 12991. [Google Scholar]
- 72. Furuse A., Hashimoto M., Proc. SIE 2017, 10163, 1016327. [Google Scholar]
- 73. Kaasik F., Must I., Baranova I., Põldsalu I., Lust E., Johanson U., Punning A., Aabloo A., Sens. Actuators, B 2017, 246, 154. [Google Scholar]
- 74. Baughman R. H., Cui C., Zakhidov A. A., Iqbal Z., Barisci J. N., Spinks G. M., Wallace G. G., Mazzoldi A., De Rossi D., Rinzler A. G., Jaschinski O., Roth S., Kertesz M., Science 1999, 284, 1340. [DOI] [PubMed] [Google Scholar]
- 75. Foroughi J., Spinks G. M., Wallace G. G., Oh J., Kozlov M. E., Fang S., Mirfakhrai T., Madden J. D., Shin M. K., Kim S. J., Baughman R. H., Science 2011, 334, 494. [DOI] [PubMed] [Google Scholar]
- 76. Zi Y., Wang J., Wang S., Li S., Wen Z., Guo H., Wang Z. L., Nat. Commun. 2016, 7, 10987. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 77. Sinibaldi E., Argiolas A., Puleo G. L., Mazzolai B., PLoS One 2014, 9, e102461. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 78. Smela E., Faraday Discuss. 2017, 199, 465. [DOI] [PubMed] [Google Scholar]
- 79. Must I., Sinibaldi E., Mazzolai B., Nat. Commun. 2019, 10, 344. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 80. Lee J. A., Kim Y. T., Spinks G. M., Suh D., Lepro X., Lima M. D., Baughman R. H., Kim S. J., Nano Lett. 2014, 14, 2664. [DOI] [PubMed] [Google Scholar]
- 81. Chen P., Xu Y., He S., Sun X., Guo W., Zhang Z., Qiu L., Li J., Chen D., Peng H., Adv. Mater. 2015, 27, 1042. [DOI] [PubMed] [Google Scholar]
- 82. He S., Chen P., Sun X., Peng H., Industrial Applications of Carbon Nanotubes, Elsevier, Amsterdam, The Netherlands: 2017, p. 151. [Google Scholar]
- 83. Aguilar M. R., San Román J., Smart Polymers and Their Applications, Woodhead Publishing, Cambridge, UK: 2019. [Google Scholar]
- 84. Wie J. J., Shankar M. R., White T. J., Nat. Commun. 2016, 7, 13260. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 85. Xu B., Zhu C., Qin L., Wei J., Yu Y., Small 2019, 15, 1901847. [DOI] [PubMed] [Google Scholar]
- 86. Yoshino T., Kondo M., Mamiya J., Kinoshita M., Yu Y., Ikeda T., Adv. Mater. 2010, 22, 1361. [DOI] [PubMed] [Google Scholar]
- 87. Gelebart A. H., Mc Bride M., Schenning A. P. H. J., Bowman C. N., Broer D. J., Adv. Funct. Mater. 2016, 26, 5322. [Google Scholar]
- 88. Ruangsupapichat N., Pollard M. M., Harutyunyan S. R., Feringa B. L., Nat. Chem. 2011, 3, 53. [DOI] [PubMed] [Google Scholar]
- 89. Li D., Paxton W. F., Baughman R. H., Huang T. J., Stoddart J. F., Weiss P. S., MRS Bull. 2009, 34, 671. [Google Scholar]
- 90. Lancia F., Ryabchun A., Nguindjel A. D., Kwangmettatam S., Katsonis N., Nat. Commun. 2019, 10, 4819. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 91. Chen J., Leung F. K., Stuart M. C. A., Kajitani T., Fukushima T., van der Giessen E., Feringa B. L., Nat. Chem. 2018, 10, 132. [DOI] [PubMed] [Google Scholar]
- 92. Liao J., Yang M., Liu Z., Zhang H., J. Mater. Chem. A 2019, 7, 2002. [Google Scholar]
- 93. Zeng H., Lahikainen M., Liu L., Ahmed Z., Wani O. M., Wang M., Yang H., Priimagi A., Nat. Commun. 2019, 10, 5057. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 94. Kim H., Lee J. A., Ambulo C. P., Lee H. B., Kim S. H., Naik V. V., Haines C. S., Aliev A. E., Ovalle‐Robles R., Baughman R. H., Ware T. H., Adv. Funct. Mater. 2019, 29, 1806412. [Google Scholar]
- 95. Shi Q., Li J., Hou C., Shao Y., Zhang Q., Li Y., Wang H., Chem. Commun. 2017, 53, 11118. [DOI] [PubMed] [Google Scholar]
- 96. Pilate F., Toncheva A., Dubois P., Raquez J.‐M., Eur. Polym. J. 2016, 80, 268. [Google Scholar]
- 97. Lendlein A., Langer R., Science 2002, 296, 1673. [DOI] [PubMed] [Google Scholar]
- 98. Yuan J., Neri W., Zakri C., Merzeau P., Kratz K., Lendlein A., Poulin P., Science 2019, 365, 155. [DOI] [PubMed] [Google Scholar]
- 99. Farhan M., Rudolph T., Kratz K., Lendlein A., MRS Adv. 2018, 3, 3861. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 100. Shen Q., Trabia S., Stalbaum T., Palmre V., Kim K., Oh I. K., Sci. Rep. 2016, 6, 24462. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 101. Ionov L., Stoychev G., Jehnichen D., Sommer J. U., ACS Appl. Mater. Interfaces 2017, 9, 4873. [DOI] [PubMed] [Google Scholar]
- 102. Cherubini A., Moretti G., Vertechy R., Fontana M., AIP Adv. 2015, 5, 067158. [Google Scholar]
- 103. Kim H., Moon J. H., Mun T. J., Park T. G., Spinks G. M., Wallace G. G., Kim S. J., ACS Appl. Mater. Interfaces 2018, 10, 32760. [DOI] [PubMed] [Google Scholar]
- 104. Park J., Yoo J. W., Seo H. W., Lee Y., Suhr J., Moon H., Koo J. C., Choi H. R., Hunt R., Kim K. J., Kim S. H., Nam J.‐D., Smart Mater. Struct. 2017, 26, 035048. [Google Scholar]
- 105. Haines C. S., Lima M. D., Li N., Spinks G. M., Foroughi J., Madden J. D., Kim S. H., Fang S., Jung de Andrade M., Goktepe F., Goktepe O., Mirvakili S. M., Naficy S., Lepro X., Oh J., Kozlov M. E., Kim S. J., Xu X., Swedlove B. J., Wallace G. G., Baughman R. H., Science 2014, 343, 868. [DOI] [PubMed] [Google Scholar]
- 106. Lima M. D., Li N., Jung de Andrade M., Fang S., Oh J., Spinks G. M., Kozlov M. E., Haines C. S., Suh D., Foroughi J., Kim S. J., Chen Y., Ware T., Shin M. K., Machado L. D., Fonseca A. F., Madden J. D., Voit W. E., Galvao D. S., Baughman R. H., Science 2012, 338, 928. [DOI] [PubMed] [Google Scholar]
- 107. Yuen M. C., Bilodeau R. A., Kramer R. K., IEEE Robot. Autom. Lett. 2016, 1, 708. [Google Scholar]
- 108. Chenal T. P., Case J. C., Paik J., Kramer R. K., in 2014 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, IEEE, Piscataway: 2014, p. 2827. [Google Scholar]
- 109. Chun K. Y., Hyeong Kim S., Kyoon Shin M., Hoon Kwon C., Park J., Tae Kim Y., Spinks G. M., Lima M. D., Haines C. S., Baughman R. H., Jeong Kim S., Nat. Commun. 2014, 5, 3322. [DOI] [PubMed] [Google Scholar]
- 110. Le Duigou A., Castro M., Bevan R., Martin N., Mater. Des. 2016, 96, 106. [Google Scholar]
- 111. Liu D., Tarakanova A., Hsu C. C., Yu M., Zheng S., Yu L., Liu J., He Y., Dunstan D. J., Buehler M. J., Sci. Adv. 2019, 5, eaau9183. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 112. Lee D. Y., Kim Y., Lee S.‐J., Lee M.‐H., Lee J.‐Y., Kim B.‐Y., Cho N.‐I., Mater. Sci. Eng., C 2008, 28, 294. [Google Scholar]
- 113. Chen P., Xu Y., He S., Sun X., Pan S., Deng J., Chen D., Peng H., Nat. Nanotechnol. 2015, 10, 1077. [DOI] [PubMed] [Google Scholar]
- 114. Deng J., Xu Y., He S., Chen P., Bao L., Hu Y., Wang B., Sun X., Peng H., Nat. Protoc. 2017, 12, 1349. [DOI] [PubMed] [Google Scholar]
- 115. Mu J., Jung de Andrade M., Fang S., Wang X., Gao E., Li N., Kim S. H., Wang H., Hou C., Zhang Q., Zhu M., Qian D., Lu H., Kongahage D., Talebian S., Foroughi J., Spinks G., Kim H., Ware T. H., Sim H. J., Lee D. Y., Jang Y., Kim S. J., Baughman R. H., Science 2019, 365, 150. [DOI] [PubMed] [Google Scholar]
- 116. He S., Chen P., Qiu L., Wang B., Sun X., Xu Y., Peng H., Angew. Chem., Int. Ed. 2015, 54, 14880. [DOI] [PubMed] [Google Scholar]
- 117. Sun Y., Wang Y., Hua C., Ge Y., Hou S., Shang Y., Cao A., Carbon 2018, 132, 394. [Google Scholar]
- 118. Cheng H., Liu J., Zhao Y., Hu C., Zhang Z., Chen N., Jiang L., Qu L., Angew. Chem., Int. Ed. 2013, 52, 10482. [DOI] [PubMed] [Google Scholar]
- 119. Gao D., Lin M. F., Xiong J., Li S., Lou S. N., Liu Y., Ciou J. H., Zhou X., Lee P. S., Nanoscale Horiz. 2020, 5, 730. [DOI] [PubMed] [Google Scholar]
- 120. Cai G., Ciou J. H., Liu Y., Jiang Y., Lee P. S., Sci. Adv. 2019, 5, eaaw7956. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 121. Shin B., Ha J., Lee M., Park K., Park G. H., Choi T. H., Cho K.‐J., Kim H.‐Y., Sci. Rob. 2018, 3, eaar2629. [DOI] [PubMed] [Google Scholar]
- 122. Jiang Y., Korpas L. M., Raney J. R., Nat. Commun. 2019, 10, 128. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 123. Xu T., Han Q., Cheng Z., Zhang J., Qu L., Small Methods 2018, 2, 1800108. [Google Scholar]
- 124. Connolly F., Polygerinos P., Walsh C. J., Bertoldi K., Soft Rob. 2015, 2, 26. [Google Scholar]
- 125. Singh G., Krishnan G., Soft Rob. 2020, 7, 109. [DOI] [PubMed] [Google Scholar]
- 126. Sitti M., Wiersma D. S., Adv. Mater. 2020, 32, 1906766. [DOI] [PubMed] [Google Scholar]
- 127. Challa S., Islam M. S., Harnett C. K., in 2019 Int. Conf. on Manipulation, Automation and Robotics at Small Scales (MARSS), IEEE, Piscataway, NJ, USA: 2019, 10.1109/MARSS.2019.8860986. [DOI] [Google Scholar]
- 128. Jang S.‐H., Na S.‐H., Park Y.‐L., Materials 2017, 10, 646.28773007 [Google Scholar]
- 129. Zhou Y., Zhu W., Zhang L., Gong J., Zhao D., Liu M., Lin L., Meng Q., Thompson R., Sun Y., J. Eng. Fibers Fabr. 2019, 14, 10.1177/1558925019865708. [DOI] [Google Scholar]
- 130. Zhang F. H., Zhang Z. C., Luo C. J., Lin I. T., Liu Y., Leng J., Smoukov S. K., J. Mater. Chem. C 2015, 3, 11290. [Google Scholar]
- 131. Lee D. W., Kim S. H., Kozlov M. E., Lepró X., Baughman R. H., Kim S. J., RSC Adv. 2018, 8, 17421. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 132. Kim Y., Yuk H., Zhao R., Chester S. A., Zhao X., Nature 2018, 558, 274. [DOI] [PubMed] [Google Scholar]
- 133. Gaiser I., Wiegand R., Ivlev O., Andres A., Breitwieser H., Schulz S., Bretthauer G., Smart Actuation and Sensing Systems—Recent Advances and Future Challenges, Scitus Academics, Wilmington, DE, USA: 2012. [Google Scholar]
- 134. Schaffner M., Faber J. A., Pianegonda L., Ruhs P. A., Coulter F., Studart A. R., Nat. Commun. 2018, 9, 878. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 135. Kim S. Y., Baines R., Booth J., Vasios N., Bertoldi K., Kramer‐Bottiglio R., Nat. Commun. 2019, 10, 3464. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 136. Maziz A., Concas A., Khaldi A., Stalhand J., Persson N. K., Jager E. W., Sci. Adv. 2017, 3, e1600327. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 137. Jia T., Wang Y., Dou Y., Li Y., Jung de Andrade M., Wang R., Fang S., Li J., Yu Z., Qiao R., Liu Z., Cheng Y., Su Y., Minary‐Jolandan M., Baughman R. H., Qian D., Liu Z., Adv. Funct. Mater. 2019, 29, 1808241. [Google Scholar]
- 138. Wang W., Xiang C., Liu Q., Li M., Zhong W., Yan K., Wang D., J. Mater. Chem. A 2018, 6, 22599. [Google Scholar]
- 139. Furukawa S., Wakimoto S., Kanda T., Hagihara H., Actuators 2019, 8, 40. [Google Scholar]
- 140. Hines L., Petersen K., Lum G. Z., Sitti M., Adv. Mater. 2017, 29, 1603483. [DOI] [PubMed] [Google Scholar]
- 141. Shintake J., Cacucciolo V., Floreano D., Shea H., Adv. Mater. 2018, 30, 1707035. [DOI] [PubMed] [Google Scholar]
- 142. Paek J., Cho I., Kim J., Sci. Rep. 2015, 5, 10768. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 143. Wang W., Li C., Cho M., Ahn S. H., ACS Appl. Mater. Interfaces 2018, 10, 10419. [DOI] [PubMed] [Google Scholar]
- 144. Wang W., Yu C. Y., Abrego Serrano P. A., Ahn S.‐H., Compos., Part B 2019, 164, 198. [Google Scholar]
- 145. Deng J., Li J., Chen P., Fang X., Sun X., Jiang Y., Weng W., Wang B., Peng H., J. Am. Chem. Soc. 2016, 138, 225. [DOI] [PubMed] [Google Scholar]
- 146. Yu J., Yufeng X., Xuequan L., Li‐Hua S., Nanomater 2019, 9, 1704. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 147. Dong Y., Wang J., Guo X., Yang S., Ozen M. O., Chen P., Liu X., Du W., Xiao F., Demirci U., Liu B. F., Nat. Commun. 2019, 10, 4087. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 148. Hawkes E. W., Christensen D. L., Amy Kyungwon H., Jiang H., Cutkosky M. R., in 2015 IEEE Int. Conf. on Robotics and Automation (ICRA), IEEE, Piscataway, NJ, USA: 2015, p. 2305. [Google Scholar]
- 149. Shah D. S., Yuen M. C., Tilton L. G., Yang E. J., Kramer‐Bottiglio R., IEEE Robot. Autom. Lett. 2019, 4, 2204. [Google Scholar]
- 150. Hughes J., Culha U., Giardina F., Guenther F., Rosendo A., Iida F., Front. Rob. AI 2016, 3, 69. [Google Scholar]
- 151. Trivedi D., Rahn C. D., Kier W. M., Walker I. D., Appl. Bionics Biomech. 2008, 5, 99. [Google Scholar]
- 152. Hiraoka M., Nakamura K., Arase H., Asai K., Kaneko Y., John S. W., Tagashira K., Omote A., Sci. Rep. 2016, 6, 36358. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 153. Choe K., Kim K. J., Kim D., Manford C., Heo S., Shahinpoor M., J. Intell. Mater. Syst. Struct. 2006, 17, 563. [Google Scholar]
- 154. Saharan L., de Andrade M. J., Saleem W., Baughman R. H., Tadesse Y., Smart Mater. Struct. 2017, 26, 105048. [Google Scholar]
- 155. Wu L., Jung de Andrade M., Saharan L. K., Rome R. S., Baughman R. H., Tadesse Y., Bioinspir. Biomim. 2017, 12, 026004. [DOI] [PubMed] [Google Scholar]
- 156. Kim K., Cho K. H., Jung H. S., Yang S. Y., Kim Y., Park J. H., Jang H., Nam J.‐D., Koo J. C., Moon H., Suk J. W., Rodrigue H., Choi H. R., Adv. Eng. Mater. 2018, 20. [Google Scholar]
- 157. Yip M. C., Niemeyer G., IEEE Trans. Rob. 2017, 33, 689. [Google Scholar]
- 158. Suzuki M., Kamamichi N., Actuators 2018, 7, 33. [Google Scholar]
- 159. Tonazzini A., Mintchev S., Schubert B., Mazzolai B., Shintake J., Floreano D., Adv. Mater. 2016, 28, 10142. [DOI] [PubMed] [Google Scholar]
- 160. Roach D. J., Yuan C., Kuang X., Li V. C., Blake P., Romero M. L., Hammel I., Yu K., Qi H. J., ACS Appl. Mater. Interfaces 2019, 11, 19514. [DOI] [PubMed] [Google Scholar]
- 161. Hsu P. C., Song A. Y., Catrysse P. B., Liu C., Peng Y., Xie J., Fan S., Cui Y., Science 2016, 353, 1019. [DOI] [PubMed] [Google Scholar]
- 162. Hsu P. C., Liu C., Song A. Y., Zhang Z., Peng Y., Xie J., Liu K., Wu C. L., Catrysse P. B., Cai L., Zhai S., Majumdar A., Fan S., Cui Y., Sci. Adv. 2017, 3, e1700895. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 163. Gao T., Yang Z., Chen C., Li Y., Fu K., Dai J., Hitz E. M., Xie H., Liu B., Song J., Yang B., Hu L., ACS Nano 2017, 11, 11513. [DOI] [PubMed] [Google Scholar]
- 164. Cai L., Song A. Y., Wu P., Hsu P.‐C., Peng Y., Chen J., Liu C., Catrysse P. B., Liu Y., Yang A., Nat. Commun. 2017, 8, 496. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 165. Cui Y., Gong H., Wang Y., Li D., Bai H., Adv. Mater 2018, 30, 1706807. [DOI] [PubMed] [Google Scholar]
- 166. Peng Y., Chen J., Song A. Y., Catrysse P. B., Hsu P.‐C., Cai L., Liu B., Zhu Y., Zhou G., Wu D. S., Nat. Sustainable 2018, 1, 105. [Google Scholar]
- 167. Zhang X. A., Yu S., Xu B., Li M., Peng Z., Wang Y., Deng S., Wu X., Wu Z., Ouyang M., Wang Y., Science 2019, 363, 619. [DOI] [PubMed] [Google Scholar]
- 168. Wang R., Fang S., Xiao Y., Gao E., Jiang N., Li Y., Mou L., Shen Y., Zhao W., Li S., Fonseca A. F., Galvao D. S., Chen M., He W., Yu K., Lu H., Wang X., Qian D., Aliev A. E., Li N., Haines C. S., Liu Z., Mu J., Wang Z., Yin S., Lima M. D., An B., Zhou X., Liu Z., Baughman R. H., Science 2019, 366, 216. [DOI] [PubMed] [Google Scholar]
- 169. Han M. W., Ahn S. H., Adv. Mater 2017, 29, 1606580. [Google Scholar]
- 170. Do T. N., Visell Y., Sci. Rep 2017, 7, 1753. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 171. Kolle M., Lethbridge A., Kreysing M., Baumberg J. J., Aizenberg J., Vukusic P., Adv. Mater 2013, 25, 2239. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 172. Yang S. Y., Cho K. H., Kim Y., Kim K., Park J. H., Jung H. S., Ko J. U., Moon H., Koo J. C., Rodrigue H., Suk J. W., Nam J.‐D., Choi H. R., in 2018 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), IEEE, Piscataway, NJ, USA: 2018, p. 5451. [Google Scholar]
- 173. Jang Y., Kim S. M., Spinks G. M., Kim S. J., Adv. Mater 2020, 32, 1902670. [DOI] [PubMed] [Google Scholar]
- 174. Cai G., Wang J., Qian K., Chen J., Li S., Lee P. S., Adv. Sci. 2017, 4, 1600190. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 175. Steven E., Saleh W. R., Lebedev V., Acquah S. F., Laukhin V., Alamo R. G., Brooks J. S., Nat. Commun. 2013, 4, 2435. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 176. Chen M., Frueh J., Wang D., Lin X., Xie H., He Q., Sci. Rep. 2017, 7, 769. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 177. Chen J., Chen B., Han K., Tang W., Wang Z. L., Adv. Mater. Technol. 2019, 4, 1900337. [Google Scholar]
- 178. Wirthl D., Pichler R., Drack M., Kettlguber G., Moser R., Gerstmayr R., Hartmann F., Bradt E., Kaltseis R., Siket C. M., Schausberger S. E., Hild S., Bauer S., Kaltenbrunner M., Sci. Adv. 2017, 3, e1700053. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 179. Lee J., Tan M. W. M., Parida K., Thangavel G., Park S. A., Park T., Lee P. S., Adv. Mater. 2020, 32, 1906679. [DOI] [PubMed] [Google Scholar]
- 180. Wang X. Q., Chan K. H., Cheng Y., Ding T., Li T., Achavananthadith S., Ahmet S., Ho J. S., Ho G. W., Adv. Mater. 2020, 32, 2000351. [DOI] [PubMed] [Google Scholar]
- 181. Arab Hassani F., Mogan R. P., Gammad G. G. L., Wang H., Yen S. C., Thakor N. V., Lee C., ACS Nano 2018, 12, 3487. [DOI] [PubMed] [Google Scholar]
- 182. Hartmann F., Drack M., Kaltenbrunner M., Sci. Rob. 2018, 3, eaat9091. [DOI] [PubMed] [Google Scholar]
- 183. Liu Z. F., Fang S., Moura F. A., Ding J. N., Jiang N., Di J., Zhang M., Lepro X., Galvao D. S., Haines C. S., Yuan N. Y., Yin S. G., Lee D. W., Wang R., Wang H. Y., Lv W., Dong C., Zhang R. C., Chen M. J., Yin Q., Chong Y. T., Zhang R., Wang X., Lima M. D., Ovalle‐Robles R., Qian D., Lu H., Baughman R. H., Science 2015, 349, 400. [DOI] [PubMed] [Google Scholar]
- 184. Yuen M., Cherian A., Case J. C., Seipel J., Kramer R. K., in 2014 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, IEEE, Piscataway, NJ, USA: 2014, p. 580. [Google Scholar]
- 185. Yang H., Yeow B. S., Li Z., Li K., Chang T.‐H., Jing L., Li Y., Ho J. S., Ren H., Chen P.‐Y., Sci. Rob. 2019, 4, eaax7020. [DOI] [PubMed] [Google Scholar]
- 186. Kanik M., Orguc S., Varnavides G., Kim J., Benavides T., Gonzalez D., Akintilo T., Tasan C. C., Chandrakasan A. P., Fink Y., Anikeeva P., Science 2019, 365, 145. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 187. Foroughi J., Spinks G. M., Aziz S., Mirabedini A., Jeiranikhameneh A., Wallace G. G., Kozlov M. E., Baughman R. H., ACS Nano 2016, 10, 9129. [DOI] [PubMed] [Google Scholar]
- 188. Rus D., Tolley M. T., Nat. Rev. Mater. 2018, 3, 101. [Google Scholar]
- 189. Wang H., Totaro M., Beccai L., Adv. Sci. 2018, 5, 1800541. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 190. Xu W., Gracias D. H., ACS Nano 2019, 13, 4883. [DOI] [PubMed] [Google Scholar]
- 191. Gorissen B., Milana E., Baeyens A., Broeders E., Christiaens J., Collin K., Reynaerts D., De Volder M., Adv. Mater. 2019, 31, 1804598. [DOI] [PubMed] [Google Scholar]
- 192. Park H. L., Lee Y., Kim N., Seo D. G., Go G. T., Lee T. W., Adv. Mater. 2020, 32, 1903558. [Google Scholar]
- 193. Wang C., Sim K., Chen J., Kim H., Rao Z., Li Y., Chen W., Song J., Verduzco R., Yu C., Adv. Mater. 2018, 30, 1706695. [DOI] [PubMed] [Google Scholar]
- 194. Xiao Y. Y., Jiang Z. C., Tong X., Zhao Y., Adv. Mater. 2019, 31, 1903452. [DOI] [PubMed] [Google Scholar]
- 195. Wang J., Lin M.‐F., Park S., Lee P. S., Mater. Today 2018, 21, 508. [Google Scholar]
- 196. Gonzalez‐Vargas J., Dosen S., Amsuess S., Yu W., Farina D., PLoS One 2015, 10, e0127528. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 197. Liu Y., Norton J. J., Qazi R., Zou Z., Ammann K. R., Liu H., Yan L., Tran P. L., Jang K.‐I., Lee J. W., Sci. Adv. 2016, 2, e1601185. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 198. Persson N. K., Martinez J. G., Zhong Y., Maziz A., Jager E. W., Adv. Mater. Technol. 2018, 3, 1700397. [Google Scholar]
- 199. Ge J., Wang X., Drack M., Volkov O., Liang M., Canon Bermudez G. S., Illing R., Wang C., Zhou S., Fassbender J., Kaltenbrunner M., Makarov D., Nat. Commun. 2019, 10, 4405. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 200. Lee Y., Kim J., Jang B., Kim S., Sharma B. K., Kim J.‐H., Ahn J.‐H., Nano Energy 2019, 62, 259. [Google Scholar]
- 201. Hsu P.‐C., Liu C., Song A. Y., Zhang Z., Peng Y., Xie J., Liu K., Wu C.‐L., Catrysse P. B., Cai L., Sci. Adv. 2017, 3, e1700895. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 202. Hsu P.‐C., Song A. Y., Catrysse P. B., Liu C., Peng Y., Xie J., Fan S., Cui Y., Science 2016, 353, 1019. [DOI] [PubMed] [Google Scholar]
- 203. Zhai Y., Ma Y., David S. N., Zhao D., Lou R., Tan G., Yang R., Yin X., Science 2017, 355, 1062. [DOI] [PubMed] [Google Scholar]
- 204. Lao L., Shou D., Wu Y., Fan J., Sci. Adv. 2020, 6, eaaz0013. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 205. Cheng Y., Wang R., Sun J., Gao L., Adv. Mater. 2015, 27, 7365. [DOI] [PubMed] [Google Scholar]
- 206. Gong S., Lai D. T., Wang Y., Yap L. W., Si K. J., Shi Q., Jason N. N., Sridhar T., Uddin H., Cheng W., ACS Appl. Mater. Interfaces 2015, 7, 19700. [DOI] [PubMed] [Google Scholar]
- 207. Lee J., Shin S., Lee S., Song J., Kang S., Han H., Kim S., Kim S., Seo J., Kim D., Lee T., ACS Nano 2018, 12, 4259. [DOI] [PubMed] [Google Scholar]
- 208. Chen S., Lou Z., Chen D., Jiang K., Shen G., Adv. Mater. Technol. 2016, 1, 1600136. [Google Scholar]
- 209. Eom J., Jaisutti R., Lee H., Lee W., Heo J. S., Lee J. Y., Park S. K., Kim Y. H., ACS Appl. Mater. Interfaces 2017, 9, 10190. [DOI] [PubMed] [Google Scholar]
- 210. Frutiger A., Muth J. T., Vogt D. M., Menguc Y., Campo A., Valentine A. D., Walsh C. J., Lewis J. A., Adv. Mater. 2015, 27, 2440. [DOI] [PubMed] [Google Scholar]
- 211. Tang Z., Jia S., Wang F., Bian C., Chen Y., Wang Y., Li B., ACS Appl. Mater. Interfaces 2018, 10, 6624. [DOI] [PubMed] [Google Scholar]
- 212. Imani K. B. C., Kim D., Kim D., Yoon J., Langmuir 2018, 34, 11553. [DOI] [PubMed] [Google Scholar]
- 213. Yan W., Page A., Nguyen‐Dang T., Qu Y., Sordo F., Wei L., Sorin F., Adv. Mater. 2019, 31, 1802348. [DOI] [PubMed] [Google Scholar]
- 214. Zang S., Wang Q., Wan J., Huang X., Ren X., Biomed. Phys. Eng. Express. 2019, 5, 045011. [Google Scholar]
- 215. Lee J., Kwon H., Seo J., Shin S., Koo J. H., Pang C., Son S., Kim J. H., Jang Y. H., Kim D. E., Lee T., Adv. Mater. 2015, 27, 2433. [DOI] [PubMed] [Google Scholar]
- 216. Liao X., Liao Q., Zhang Z., Yan X., Liang Q., Wang Q., Li M., Zhang Y., Adv. Funct. Mater. 2016, 26, 3074. [Google Scholar]
- 217. Chen S., Liu H., Liu S., Wang P., Zeng S., Sun L., Liu L., ACS Appl. Mater. Interfaces 2018, 10, 4305. [DOI] [PubMed] [Google Scholar]
- 218. Gao D., Parida K., Lee P. S., Adv. Funct. Mater. 2019, 1907184. [Google Scholar]
- 219. Fleury A., Sugar M., Chau T., Electronics 2015, 4, 173. [Google Scholar]
- 220. Yapici M. K., Alkhidir T. E., Sensors 2017, 17, 875. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 221. Matsuhisa N., Kaltenbrunner M., Yokota T., Jinno H., Kuribara K., Sekitani T., Someya T., Nat. Commun. 2015, 6, 7461. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 222. Lofhede J., Seoane F., Thordstein M., Sensors 2012, 12, 16907. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 223. Zhu Z., Liu T., Li G., Li T., Inoue Y., Sensors 2015, 15, 3721. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 224. Ray T. R., Choi J., Bandodkar A. J., Krishnan S., Gutruf P., Tian L., Ghaffari R., Rogers J. A., Chem. Rev. 2019, 119, 5461. [DOI] [PubMed] [Google Scholar]
- 225. Yamagami M., Peters K. M., Milovanovic I., Kuang I., Yang Z., Lu N., Steele K. M., Sensors 2018, 18, 1269. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 226. Lee S., Yoon J., Lee D., Seong D., Lee S., Jang M., Choi J., Yu K. J., Kim J., Lee S., Son D., Electronics 2020, 9, 269. [Google Scholar]
- 227. Kumari P., Mathew L., Syal P., Biosens. Bioelectron. 2017, 90, 298. [DOI] [PubMed] [Google Scholar]
- 228. Park M., Do K., Kim J., Son D., Koo J. H., Park J., Song J. K., Kim J. H., Lee M., Hyeon T., Kim D. H., Adv. Healthcare Mater. 2015, 4, 992. [DOI] [PubMed] [Google Scholar]
- 229. Lee J., Llerena Zambrano B., Woo J., Yoon K., Lee T., Adv. Mater. 2020, 32, 1902532. [DOI] [PubMed] [Google Scholar]
- 230. Wang T., Qi D., Yang H., Liu Z., Wang M., Leow W. R., Chen G., Yu J., He K., Cheng H., Wu Y. L., Zhang H., Chen X., Adv. Mater. 2019, 31, 1803883. [DOI] [PubMed] [Google Scholar]
- 231. Lee Y., Ahn J. H., ACS Nano 2020, 14, 1220. [DOI] [PubMed] [Google Scholar]
- 232. Yu L., Yeo J. C., Soon R. H., Yeo T., Lee H. H., Lim C. T., ACS Appl. Mater. Interfaces 2018, 10, 12773. [DOI] [PubMed] [Google Scholar]
- 233. Weng W., Yang J., Zhang Y., Li Y., Yang S., Zhu L., Zhu M., Adv. Mater. 2019, e1902301. [DOI] [PubMed] [Google Scholar]
- 234. Heo J. S., Eom J., Kim Y. H., Park S. K., Small 2018, 14, 1703034. [Google Scholar]
- 235. Wang C., Li X., Gao E., Jian M., Xia K., Wang Q., Xu Z., Ren T., Zhang Y., Adv. Mater. 2016, 28, 6640. [DOI] [PubMed] [Google Scholar]
- 236. Zhang M., Wang C., Wang Q., Jian M., Zhang Y., ACS Appl. Mater. Interfaces 2016, 8, 20894. [DOI] [PubMed] [Google Scholar]
- 237. Yang Z., Pang Y., Han X. L., Yang Y., Ling J., Jian M., Zhang Y., Yang Y., Ren T. L., ACS Nano 2018, 12, 9134. [DOI] [PubMed] [Google Scholar]
- 238. Li Y., Li Y., Su M., Li W., Li Y., Li H., Qian X., Zhang X., Li F., Song Y., Adv. Electron. Mater. 2017, 3, 1700253. [Google Scholar]
- 239. Lan L., Zhao F., Yao Y., Ping J., Ying Y., ACS Appl. Mater. Interfaces 2020, 12, 10689. [DOI] [PubMed] [Google Scholar]
- 240. Atalay A., Sanchez V., Atalay O., Vogt D. M., Haufe F., Wood R. J., Walsh C. J., Adv. Mater. Technol. 2017, 2, 1700136. [Google Scholar]
- 241. Takamatsu S., Lonjaret T., Ismailova E., Masuda A., Itoh T., Malliaras G. G., Adv. Mater. 2016, 28, 4485. [DOI] [PubMed] [Google Scholar]
- 242. Liu M., Pu X., Jiang C., Liu T., Huang X., Chen L., Du C., Sun J., Hu W., Wang Z. L., Adv. Mater. 2017, 29, 1703700. [DOI] [PubMed] [Google Scholar]
- 243. Hong S. Y., Lee Y. H., Park H., Jin S. W., Jeong Y. R., Yun J., You I., Zi G., Ha J. S., Adv. Mater. 2016, 28, 930. [DOI] [PubMed] [Google Scholar]
- 244. Trung T. Q., Ramasundaram S., Hwang B. U., Lee N. E., Adv. Mater. 2016, 28, 502. [DOI] [PubMed] [Google Scholar]
- 245. Yamamoto Y., Yamamoto D., Takada M., Naito H., Arie T., Akita S., Takei K., Adv. Healthcare Mater. 2017, 6, 1700495. [DOI] [PubMed] [Google Scholar]
- 246. Yang H., Qi D., Liu Z., Chandran B. K., Wang T., Yu J., Chen X., Adv. Mater. 2016, 28, 9175. [DOI] [PubMed] [Google Scholar]
- 247. Li Q., Zhang L. N., Tao X. M., Ding X., Adv. Healthcare Mater. 2017, 6, 1601371. [Google Scholar]
- 248. He Y., Gui Q., Liao S., Jia H., Wang Y., Adv. Mater. Technol. 2016, 1, 1600170. [Google Scholar]
- 249. He Y., Gui Q., Wang Y., Wang Z., Liao S., Wang Y., Small 2018, 14, 1800394. [DOI] [PubMed] [Google Scholar]
- 250. Trung T. Q., Le H. S., Dang T. M. L., Ju S., Park S. Y., Lee N. E., Adv. Healthcare Mater. 2018, 7, 1800074. [Google Scholar]
- 251. Guo J., Zhou B., Yang C., Dai Q., Kong L., Adv. Funct. Mater. 2019, 29, 1902898. [Google Scholar]
- 252. Wu R., Ma L., Hou C., Meng Z., Guo W., Yu W., Yu R., Hu F., Liu X. Y., Small 2019, 15, 1901558. [DOI] [PubMed] [Google Scholar]
- 253. Zhao J., Zhang Y., Huang Y., Xie J., Zhao X., Li C., Qu J., Zhang Q., Sun J., He B., Li Q., Lu C., Xu X., Lu W., Li L., Yao Y., Adv. Sci. 2018, 5, 1801114. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 254. Trung T. Q., Duy L. T., Ramasundaram S., Lee N.‐E., Nano Res. 2017, 10, 2021. [Google Scholar]
- 255. Najeeb M. A., Ahmad Z., Shakoor R. A., Adv. Mater. Interfaces 2018, 5, 1800969. [Google Scholar]
- 256. Choi S. J., Yu H., Jang J. S., Kim M. H., Kim S. J., Jeong H. S., Kim I. D., Small 2018, 14, 1703934. [DOI] [PubMed] [Google Scholar]
- 257. Zhou G., Byun J. H., Oh Y., Jung B. M., Cha H. J., Seong D. G., Um M. K., Hyun S., Chou T. W., ACS Appl. Mater. Interfaces 2017, 9, 4788. [DOI] [PubMed] [Google Scholar]
- 258. Ma L., Wu R., Patil A., Zhu S., Meng Z., Meng H., Hou C., Zhang Y., Liu Q., Yu R., Wang J., Lin N., Liu X. Y., Adv. Funct. Mater. 2019, 29, 1904549. [Google Scholar]
- 259. Tousi M. M., Zhang Y., Wan S., Yu L., Hou C., Yan N., Fink Y., Wang A., Jia X., Polymers 2019, 11, 1985. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 260. Li B., Xiao G., Liu F., Qiao Y., Li C. M., Lu Z., J. Mater. Chem. C 2018, 6, 4549. [Google Scholar]
- 261. Bandodkar A. J., Jeerapan I., Wang J., ACS Sens. 2016, 1, 464. [Google Scholar]
- 262. Bandodkar A. J., Wang J., Trends Biotechnol. 2014, 32, 363. [DOI] [PubMed] [Google Scholar]
- 263. Economou A., Kokkinos C., Prodromidis M., Lab Chip 2018, 18, 1812. [DOI] [PubMed] [Google Scholar]
- 264. Parrilla M., Cuartero M., Crespo G. A., TrAC Trends Anal. Chem. 2019, 110, 303. [Google Scholar]
- 265. Promphet N., Rattanawaleedirojn P., Siralertmukul K., Soatthiyanon N., Potiyaraj P., Thanawattano C., Hinestroza J. P., Rodthongkum N., Talanta 2019, 192, 424. [DOI] [PubMed] [Google Scholar]
- 266. Jia J., Xu C., Pan S., Xia S., Wei P., Noh H. Y., Zhang P., Jiang X., Sensors 2018, 18, 3775. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 267. Lv J., Jeerapan I., Tehrani F., Yin L., Silva‐Lopez C. A., Jang J.‐H., Joshuia D., Shah R., Liang Y., Xie L., Soto F., Chen C., Karshalev E., Kong C., Yang Z., Wang J., Energy Environ. Sci. 2018, 11, 3431. [Google Scholar]
- 268. Jia W., Wang X., Imani S., Bandodkar A. J., Ramírez J., Mercier P. P., Wang J., J. Mater. Chem. A 2014, 2, 18184. [Google Scholar]
- 269. Jeerapan I., Sempionatto J. R., Pavinatto A., You J. M., Wang J., J. Mater. Chem. A 2016, 4, 18342. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 270. Larcher D., Tarascon J.‐M., Nat. Chem. 2015, 7, 19. [DOI] [PubMed] [Google Scholar]
- 271. Lin M.‐F., Xiong J., Wang J., Parida K., Lee P. S., Nano Energy 2018, 44, 248. [Google Scholar]
- 272. He T., Wang H., Wang J., Tian X., Wen F., Shi Q., Ho J. S., Lee C., Adv. Sci. 2019, 6, 1901437. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 273. Chen X., Parida K., Wang J., Xiong J., Lin M.‐F., Shao J., Lee P. S., ACS Appl. Mater. Interfaces 2017, 9, 42200. [DOI] [PubMed] [Google Scholar]
- 274. Huang L., Chen J., Yu Z., Tang D., Anal. Chem. 2020, 92, 2809. [DOI] [PubMed] [Google Scholar]
- 275. Zhou M., Dong S., Acc. Chem. Res. 2011, 44, 1232. [DOI] [PubMed] [Google Scholar]
- 276. Grattieri M., Minteer S. D., ACS Sens. 2018, 3, 44. [DOI] [PubMed] [Google Scholar]
- 277. Jia W., Valdes‐Ramirez G., Bandodkar A. J., Windmiller J. R., Wang J., Angew. Chem., Int. Ed. 2013, 52, 7233. [DOI] [PubMed] [Google Scholar]
- 278. Xiong J., Li S., Ye Y., Wang J., Qian K., Cui P., Gao D., Lin M.‐F., Chen T., Lee P. S., Adv. Mater. 2018, 30, 1802803. [DOI] [PubMed] [Google Scholar]
- 279. Karim N., Afroj S., Tan S., He P., Fernando A., Carr C., Novoselov K. S., ACS Nano 2017, 11, 12266. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 280. Liang J., Tong K., Pei Q., Adv. Mater. 2016, 28, 5986. [DOI] [PubMed] [Google Scholar]
- 281. Grancarić A. M., Jerković I., Koncar V., Cochrane C., Kelly F. M., Soulat D., Legrand X., J. Ind. Text. 2018, 48, 612. [Google Scholar]
- 282. Karim N., Afroj S., Malandraki A., Butterworth S., Beach C., Rigout M., Novoselov K. S., Casson A. J., Yeates S. G., J. Mater. Chem. C 2017, 5, 11640. [Google Scholar]
- 283. Chun K. Y., Oh Y., Rho J., Ahn J. H., Kim Y. J., Choi H. R., Baik S., Nat. Nanotechnol. 2010, 5, 853. [DOI] [PubMed] [Google Scholar]
- 284. Pahalagedara L. R., Siriwardane I. W., Tissera N. D., Wijesena R. N., de Silva K. M. N., RSC Adv. 2017, 7, 19174. [Google Scholar]
- 285. Mule A. R., Dudem B., Patnam H., Graham S. A., Yu J. S., ACS Sustainable Chem. Eng. 2019, 7, 16450. [Google Scholar]
- 286. Perelaer J., Jani R., Grouchko M., Kamyshny A., Magdassi S., Schubert U. S., Adv. Mater. 2012, 24, 3993. [DOI] [PubMed] [Google Scholar]
- 287. Fan Z., Ho J. C., Takahashi T., Yerushalmi R., Takei K., Ford A. C., Chueh Y.‐L., Javey A., Adv. Mater. 2009, 21, 3730. [Google Scholar]
- 288. Jin H., Matsuhisa N., Lee S., Abbas M., Yokota T., Someya T., Adv. Mater. 2017, 29, 1605848. [DOI] [PubMed] [Google Scholar]
- 289. Wang J., Cai G., Li S., Gao D., Xiong J., Lee P. S., Adv. Mater. 2018, 30, 1706157. [DOI] [PubMed] [Google Scholar]
- 290. Odom S. A., Chayanupatkul S., Blaiszik B. J., Zhao O., Jackson A. C., Braun P. V., Sottos N. R., White S. R., Moore J. S., Adv. Mater. 2012, 24, 2578. [DOI] [PubMed] [Google Scholar]
- 291. Bandodkar A. J., López C. S., Vinu Mohan A. M., Yin L., Kumar R., Wang J., Sci. Adv. 2016, 2, e1601465. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 292. Chen D., Wang D., Yang Y., Huang Q., Zhu S., Zheng Z., Adv. Energy Mater. 2017, 7, 1700890. [Google Scholar]
- 293. Park S., Thangavel G., Parida K., Li S., Lee P. S., Adv. Mater. 2019, 31, 1805536. [DOI] [PubMed] [Google Scholar]
- 294. Perelaer J., Klokkenburg M., Hendriks C. E., Schubert U. S., Adv. Mater. 2009, 21, 4830. [DOI] [PubMed] [Google Scholar]
- 295. Yamamoto N., Takai H., Electr. Eng. Jpn. 2002, 140, 16. [Google Scholar]
- 296. Kim S. J., We J. H., Cho B. J., Energy Environ. Sci. 2014, 7, 1959. [Google Scholar]
- 297. Wu Q., Hu J., Smart Mater. Struct. 2017, 26, 045037. [Google Scholar]
- 298. Ito M., Koizumi T., Kojima H., Saito T., Nakamura M., J. Mater. Chem. A 2017, 5, 12068. [Google Scholar]
- 299. Lee J. A., Aliev A. E., Bykova J. S., de Andrade M. J., Kim D., Sim H. J., Lepro X., Zakhidov A. A., Lee J. B., Spinks G. M., Roth S., Kim S. J., Baughman R. H., Adv. Mater. 2016, 28, 5038. [DOI] [PubMed] [Google Scholar]
- 300. Sun T., Zhou B., Zheng Q., Wang L., Jiang W., Snyder G. J., Nat. Commun. 2020, 11, 572. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 301. Suarez F., Nozariasbmarz A., Vashaee D., Öztürk M. C., Energy Environ. Sci. 2016, 9, 2099. [Google Scholar]
- 302. Kim C. S., Yang H. M., Lee J., Lee G. S., Choi H., Kim Y. J., Lim S. H., Cho S. H., Cho B. J., ACS Energy Lett. 2018, 3, 501. [Google Scholar]
- 303. Feng R., Tang F., Zhang N., Wang X., ACS Appl. Mater. Interfaces 2019, 11, 38616. [DOI] [PubMed] [Google Scholar]
- 304. Zheng C., Xiang L., Jin W., Shen H., Zhao W., Zhang F., Di C. a., Zhu D., Adv. Mater. Technol. 2019, 4, 1900247. [Google Scholar]
- 305. Wang Z. L., Song J., Science 2006, 312, 242. [DOI] [PubMed] [Google Scholar]
- 306. Wu W., Wang L., Li Y., Zhang F., Lin L., Niu S., Chenet D., Zhang X., Hao Y., Heinz T. F., Hone J., Wang Z. L., Nature 2014, 514, 470. [DOI] [PubMed] [Google Scholar]
- 307. Yang R., Qin Y., Dai L., Wang Z. L., Nat. Nanotechnol. 2009, 4, 34. [DOI] [PubMed] [Google Scholar]
- 308. Fan F.‐R., Tian Z.‐Q., Lin Wang Z., Nano Energy 2012, 1, 328. [Google Scholar]
- 309. Zhu G., Pan C., Guo W., Chen C. Y., Zhou Y., Yu R., Wang Z. L., Nano Lett. 2012, 12, 4960. [DOI] [PubMed] [Google Scholar]
- 310. Wang Z. L., ACS Nano 2013, 7, 9533. [DOI] [PubMed] [Google Scholar]
- 311. Nan K., Kang S. D., Li K., Yu K. J., Zhu F., Wang J., Dunn A. C., Zhou C., Xie Z., Agne M. T., Sci. Adv. 2018, 4, eaau5849. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 312. Sierra J. F., Neumann I., Cuppens J., Raes B., Costache M. V., Valenzuela S. O., Nat. Nanotechnol. 2018, 13, 107. [DOI] [PubMed] [Google Scholar]
- 313. Parida K., Xiong J., Zhou X., Lee P. S., Nano Energy 2019, 59, 237. [Google Scholar]
- 314. Zhou X., Parida K., Halevi O., Liu Y., Xiong J., Magdassi S., Lee P. S., Nano Energy 2020, 72, 104676. [Google Scholar]
- 315. Hua Q., Sun J., Liu H., Bao R., Yu R., Zhai J., Pan C., Wang Z. L., Nat. Commun. 2018, 9, 244. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 316. Chen X., Xiong J., Parida K., Guo M., Wang C., Wang C., Li X., Shao J., Lee P. S., Nano Energy 2019, 64, 103904. [Google Scholar]
- 317. Xu S., Qin Y., Xu C., Wei Y., Yang R., Wang Z. L., Nat. Nanotechnol. 2010, 5, 366. [DOI] [PubMed] [Google Scholar]
- 318. Wang Z. L., Wu W., Angew. Chem., Int. Ed. 2012, 51, 11700. [DOI] [PubMed] [Google Scholar]
- 319. Chen J., Tang W., Lu C., Xu L., Yang Z., Chen B., Jiang T., Lin Wang Z., Appl. Phys. Lett. 2017, 110, 201603. [Google Scholar]
- 320. Kwak S. S., Yoon H.‐J., Kim S.‐W., Adv. Funct. Mater. 2019, 29, 1804533. [Google Scholar]
- 321. Xiong J., Luo H., Gao D., Zhou X., Cui P., Thangavel G., Parida K., Lee P. S., Nano Energy 2019, 61, 584. [Google Scholar]
- 322. Chen J., Tang W., Han K., Xu L., Chen B., Jiang T., Wang Z. L., Adv. Mater. Technol. 2019, 4, 1800560. [Google Scholar]
- 323. He T., Shi Q., Wang H., Wen F., Chen T., Ouyang J., Lee C., Nano Energy 2019, 57, 338. [Google Scholar]
- 324. Chang C., Tran V. H., Wang J., Fuh Y. K., Lin L., Nano Lett. 2010, 10, 726. [DOI] [PubMed] [Google Scholar]
- 325. Li Z., Wang Z. L., Adv. Mater. 2011, 23, 84. [DOI] [PubMed] [Google Scholar]
- 326. Zeng W., Tao X.‐M., Chen S., Shang S., Chan H. L. W., Choy S. H., Energy Environ. Sci. 2013, 6, 2631. [Google Scholar]
- 327. Zhang M., Gao T., Wang J., Liao J., Qiu Y., Yang Q., Xue H., Shi Z., Zhao Y., Xiong Z., Chen L., Nano Energy 2015, 13, 298. [Google Scholar]
- 328. Ma L., Zhou M., Wu R., Patil A., Gong H., Zhu S., Wang T., Zhang Y., Shen S., Dong K., Yang L., Wang J., Guo W., Wang Z. L., ACS Nano 2020, 14, 4716. [DOI] [PubMed] [Google Scholar]
- 329. Fan W., He Q., Meng K., Tan X., Zhou Z., Zhang G., Yang J., Wang Z. L., Sci. Adv. 2020, 6, eaay2840. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 330. Xiong J., Cui P., Chen X., Wang J., Parida K., Lin M.‐F., Lee P. S., Nat. Commun. 2018, 9, 4280. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 331. Xiong J., Lin M. F., Wang J., Gaw S. L., Parida K., Lee P. S., Adv. Energy Mater. 2017, 7, 1701243. [Google Scholar]
- 332. Soin N., Shah T. H., Anand S. C., Geng J., Pornwannachai W., Mandal P., Reid D., Sharma S., Hadimani R. L., Bayramol D. V., Siores E., Energy Environ. Sci. 2014, 7, 1670. [Google Scholar]
- 333. Chen S., Tao X., Zeng W., Yang B., Shang S., Adv. Energy Mater. 2017, 7, 1601569. [Google Scholar]
- 334. Song J., Yang B., Zeng W., Peng Z., Lin S., Li J., Tao X., Adv. Mater. Technol. 2018, 3, 1800016. [Google Scholar]
- 335. Huang T., Wang C., Yu H., Wang H., Zhang Q., Zhu M., Nano Energy 2015, 14, 226. [Google Scholar]
- 336. Chen X., Song Y., Su Z., Chen H., Cheng X., Zhang J., Han M., Zhang H., Nano Energy 2017, 38, 43. [Google Scholar]
- 337. Guo Y., Zhang X.‐S., Wang Y., Gong W., Zhang Q., Wang H., Brugger J., Nano Energy 2018, 48, 152. [Google Scholar]
- 338. Li X., Lin Z.‐H., Cheng G., Wen X., Liu Y., Niu S., Wang Z. L., ACS Nano 2014, 8, 10674. [DOI] [PubMed] [Google Scholar]
- 339. Yu X., Pan J., Zhang J., Sun H., He S., Qiu L., Lou H., Sun X., Peng H., J. Mater. Chem. A 2017, 5, 6032. [Google Scholar]
- 340. Yang Y., Xie L., Wen Z., Chen C., Chen X., Wei A., Cheng P., Xie X., Sun X., ACS Appl. Mater. Interfaces 2018, 10, 42356. [DOI] [PubMed] [Google Scholar]
- 341. Zhong J., Zhong Q., Hu Q., Wu N., Li W., Wang B., Hu B., Zhou J., Adv. Funct. Mater. 2015, 25, 1798. [Google Scholar]
- 342. Zhong J., Zhang Y., Zhong Q., Hu Q., Hu B., Wang Z. L., Zhou J., ACS Nano 2014, 8, 6273. [DOI] [PubMed] [Google Scholar]
- 343. Gong W., Hou C., Zhou J., Guo Y., Zhang W., Li Y., Zhang Q., Wang H., Nat. Commun. 2019, 10, 868. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 344. Lai Y.‐C., Deng J., Zhang S. L., Niu S., Guo H., Wang Z. L., Adv. Funct. Mater. 2017, 27, 1604462. [Google Scholar]
- 345. Zhao Z., Yan C., Liu Z., Fu X., Peng L. M., Hu Y., Zheng Z., Adv. Mater. 2016, 28, 10267. [DOI] [PubMed] [Google Scholar]
- 346. Dong K., Deng J., Zi Y., Wang Y. C., Xu C., Zou H., Ding W., Dai Y., Gu B., Sun B., Wang Z. L., Adv. Mater. 2017, 29, 1702648. [DOI] [PubMed] [Google Scholar]
- 347. Xiong J., Lee P. S., Sci. Technol. Adv. Mater. 2019, 20, 837. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 348. Lin Z., Yang J., Li X., Wu Y., Wei W., Liu J., Chen J., Yang J., Adv. Funct. Mater. 2018, 28, 1704112. [Google Scholar]
- 349. Zhao T., Li J., Zeng H., Fu Y., He H., Xing L., Zhang Y., Xue X., Nanotechnology 2018, 29, 405504. [DOI] [PubMed] [Google Scholar]
- 350. Cao R., Pu X., Du X., Yang W., Wang J., Guo H., Zhao S., Yuan Z., Zhang C., Li C., Wang Z. L., ACS Nano 2018, 12, 5190. [DOI] [PubMed] [Google Scholar]
- 351. Xu W., Zheng H., Liu Y., Zhou X., Zhang C., Song Y., Deng X., Leung M., Yang Z., Xu R. X., Wang Z. L., Zeng X. C., Wang Z., Nature 2020, 578, 392. [DOI] [PubMed] [Google Scholar]
- 352. Nie J., Wang Z., Ren Z., Li S., Chen X., Lin Wang Z., Nat. Commun. 2019, 10, 2264. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 353. Leung S.‐F., Fu H.‐C., Zhang M., Hassan A. H., Jiang T., Salama K. N., Wang Z. L., He J.‐H., Energy Environ. Sci. 2020, 13, 1300. [Google Scholar]
- 354. Liang X., Jiang T., Liu G., Feng Y., Zhang C., Wang Z. L., Energy Environ. Sci. 2020, 13, 277. [Google Scholar]
- 355. Kim S. H., Haines C. S., Li N., Kim K. J., Mun T. J., Choi C., Di J., Oh Y. J., Oviedo J. P., Bykova J., Science 2017, 357, 773. [DOI] [PubMed] [Google Scholar]
- 356. Li R., Xiang X., Tong X., Zou J., Li Q., Adv. Mater. 2015, 27, 3831. [DOI] [PubMed] [Google Scholar]
- 357. Simões R., Neto V., J. Mater. Res. 2016, 31, 1633. [Google Scholar]
- 358. Chen T., Wang S., Yang Z., Feng Q., Sun X., Li L., Wang Z.‐S., Peng H., Angew. Chem., Int. Ed. 2011, 50, 1815. [DOI] [PubMed] [Google Scholar]
- 359. Lee Y. H., Kim J. S., Noh J., Lee I., Kim H. J., Choi S., Seo J., Jeon S., Kim T. S., Lee J. Y., Choi J. W., Nano Lett. 2013, 13, 5753. [DOI] [PubMed] [Google Scholar]
- 360. Pan S., Yang Z., Chen P., Deng J., Li H., Peng H., Angew. Chem., Int. Ed. 2014, 53, 6110. [DOI] [PubMed] [Google Scholar]
- 361. Zhang N., Chen J., Huang Y., Guo W., Yang J., Du J., Fan X., Tao C., Adv. Mater. 2016, 28, 263. [DOI] [PubMed] [Google Scholar]
- 362. Chai Z., Zhang N., Sun P., Huang Y., Zhao C., Fan H. J., Fan X., Mai W., ACS Nano 2016, 10, 9201. [DOI] [PubMed] [Google Scholar]
- 363. Chen J., Huang Y., Zhang N., Zou H., Liu R., Tao C., Fan X., Wang Z. L., Nat. Energy 2016, 1, 16138. [Google Scholar]
- 364. Wen Z., Yeh M.‐H., Guo H., Wang J., Zi Y., Xu W., Deng J., Zhu L., Wang X., Hu C., Sci. Adv. 2016, 2, e1600097. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 365. Jinno H., Fukuda K., Xu X., Park S., Suzuki Y., Koizumi M., Yokota T., Osaka I., Takimiya K., Someya T., Nat. Energy 2017, 2, 780. [Google Scholar]
- 366. Xu L., Fu X., Liu F., Shi X., Zhou X., Liao M., Chen C., Xu F., Wang B., Zhang B., Peng H., J. Mater. Chem. A 2020, 8, 5476. [Google Scholar]
- 367. Zhang C., Tang W., Pang Y., Han C., Wang Z. L., Adv. Mater. 2015, 27, 719. [DOI] [PubMed] [Google Scholar]
- 368. Chen X., Pu X., Jiang T., Yu A., Xu L., Wang Z. L., Adv. Funct. Mater. 2017, 27, 1603788. [Google Scholar]
- 369. Chen X., Wu Y., Yu A., Xu L., Zheng L., Liu Y., Li H., Lin Wang Z., Nano Energy 2017, 38, 91. [Google Scholar]
- 370. Chen J., Guo H., Wu Z., Xu G., Zi Y., Hu C., Wang Z. L., Nano Energy 2019, 64, 103920. [Google Scholar]
- 371. Nie J., Ren Z., Shao J., Deng C., Xu L., Chen X., Li M., Wang Z. L., ACS Nano 2018, 12, 1491. [DOI] [PubMed] [Google Scholar]
- 372. Zheng L., Dong S., Nie J., Li S., Ren Z., Ma X., Chen X., Li H., Wang Z. L., ACS Appl. Mater. Interfaces 2019, 11, 42504. [DOI] [PubMed] [Google Scholar]
- 373. Cianchetti M., Laschi C., Menciassi A., Dario P., Nat. Rev. Mater. 2018, 3, 143. [Google Scholar]
- 374. Chautems C., Tonazzini A., Boehler Q., Jeong S. H., Floreano D., Nelson B. J., Adv. Intell. Syst. 2019, 1900086. [Google Scholar]
- 375. Kim Y., Parada G. A., Liu S., Zhao X., Sci. Rob. 2019, 4, eaax7329. [DOI] [PubMed] [Google Scholar]
- 376. Wang L., Xie S., Wang Z., Liu F., Yang Y., Tang C., Wu X., Liu P., Li Y., Saiyin H., Zheng S., Sun X., Xu F., Yu H., Peng H., Nat. Biomed. Eng. 2020, 4, 159. [DOI] [PubMed] [Google Scholar]
- 377. Lee S., Wang H., Shi Q., Dhakar L., Wang J., Thakor N. V., Yen S.‐C., Lee C., Nano Energy 2017, 33, 1. [Google Scholar]
- 378. Ma Y., Zheng Q., Liu Y., Shi B., Xue X., Ji W., Liu Z., Jin Y., Zou Y., An Z., Zhang W., Wang X., Jiang W., Xu Z., Wang Z. L., Li Z., Zhang H., Nano Lett. 2016, 16, 6042. [DOI] [PubMed] [Google Scholar]
- 379. Zheng Q., Zou Y., Zhang Y., Liu Z., Shi B., Wang X., Jin Y., Ouyang H., Li Z., Wang Z. L., Sci. Adv. 2016, 2, e1501478. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 380. Zheng Q., Shi B., Fan F., Wang X., Yan L., Yuan W., Wang S., Liu H., Li Z., Wang Z. L., Adv. Mater. 2014, 26, 5851. [DOI] [PubMed] [Google Scholar]
- 381. Parvez Mahmud M. A., Huda N., Farjana S. H., Asadnia M., Lang C., Adv. Energy Mater. 2018, 8, 1701210. [Google Scholar]
- 382. Shi B., Li Z., Fan Y., Adv. Mater. 2018, 30, 1801511. [DOI] [PubMed] [Google Scholar]
- 383. Hinchet R., Yoon H.‐J., Ryu H., Kim M.‐K., Choi E.‐K., Kim D.‐S., Kim S.‐W., Science 2019, 365, 491. [DOI] [PubMed] [Google Scholar]
- 384. Lee G.‐H., Moon H., Kim H., Lee G. H., Kwon W., Yoo S., Myung D., Yun S. H., Bao Z., Hahn S. K., Nat. Rev. Mater. 2020, 5, 149. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 385. Curry E. J., Ke K., Chorsi M. T., Wrobel K. S., Miller A. N., 3rd, A. P. , Kim I., Feng J., Yue L., Wu Q., Kuo C. L., Lo K. W., Laurencin C. T., Ilies H., Purohit P. K., Nguyen T. D., Proc. Natl. Acad. Sci. USA 2018, 115, 909. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 386. Kang S. K., Koo J., Lee Y. K., Rogers J. A., Acc. Chem. Res. 2018, 51, 988. [DOI] [PubMed] [Google Scholar]
- 387. Yu X., Shou W., Mahajan B. K., Huang X., Pan H., Adv. Mater. 2018, 30, 1707624. [DOI] [PubMed] [Google Scholar]
- 388. Jiang W., Li H., Liu Z., Li Z., Tian J., Shi B., Zou Y., Ouyang H., Zhao C., Zhao L., Sun R., Zheng H., Fan Y., Wang Z. L., Li Z., Adv. Mater. 2018, 30, 1801895. [DOI] [PubMed] [Google Scholar]
- 389. Wang R., Gao S., Yang Z., Li Y., Chen W., Wu B., Wu W., Adv. Mater. 2018, 30, 1706267. [DOI] [PubMed] [Google Scholar]
- 390. Jung Y. H., Park B., Kim J. U., Kim T. I., Adv. Mater. 2019, 31, 1803637. [DOI] [PubMed] [Google Scholar]
- 391. Kim J., Campbell A. S., de Avila B. E., Wang J., Nat. Biotechnol. 2019, 37, 389. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 392. Gerhardt L. C., Strassle V., Lenz A., Spencer N. D., Derler S., J. R. Soc., Interface 2008, 5, 1317. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 393. Yokus M. A., Daniele M. A., MRS Adv. 2016, 1, 2671. [Google Scholar]
- 394. Seo J.‐W., Kim H., Kim K., Choi S. Q., Lee H. J., Adv. Funct. Mater. 2018, 28, 1800802. [Google Scholar]
- 395. Yoon J., Jeong Y., Kim H., Yoo S., Jung H. S., Kim Y., Hwang Y., Hyun Y., Hong W. K., Lee B. H., Choa S. H., Ko H. C., Nat. Commun. 2016, 7, 11477. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 396. Lin R., Kim H. J., Achavananthadith S., Kurt S. A., Tan S. C. C., Yao H., Tee B. C. K., Lee J. K. W., Ho J. S., Nat. Commun. 2020, 11, 444. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 397. Wani O. M., Zeng H., Priimagi A., Nat. Commun. 2017, 8, 15546. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 398. Lee Y., Oh J. Y., Xu W., Kim O., Kim T. R., Kang J., Kim Y., Son D., Tok J. B.‐H., Park M. J., Sci. Adv. 2018, 4, eaat7387. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 399. Son D., Lee J., Qiao S., Ghaffari R., Kim J., Lee J. E., Song C., Kim S. J., Lee D. J., Jun S. W., Yang S., Park M., Shin J., Do K., Lee M., Kang K., Hwang C. S., Lu N., Hyeon T., Kim D. H., Nat. Nanotechnol. 2014, 9, 397. [DOI] [PubMed] [Google Scholar]
- 400. Xu S., Zhang Y., Jia L., Mathewson K. E., Jang K.‐I., Kim J., Fu H., Huang X., Chava P., Wang R., Science 2014, 344, 70. [DOI] [PubMed] [Google Scholar]
- 401. Yokota T., Inoue Y., Terakawa Y., Reeder J., Kaltenbrunner M., Ware T., Yang K., Mabuchi K., Murakawa T., Sekino M., Voit W., Sekitani T., Someya T., Proc. Natl. Acad. Sci. USA 2015, 112, 14533. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 402. Gao W., Emaminejad S., Nyein H. Y. Y., Challa S., Chen K., Peck A., Fahad H. M., Ota H., Shiraki H., Kiriya D., Lien D. H., Brooks G. A., Davis R. W., Javey A., Nature 2016, 529, 509. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 403. Xu B., Akhtar A., Liu Y., Chen H., Yeo W. H., Park S. I., Boyce B., Kim H., Yu J., Lai H. Y., Jung S., Zhou Y., Kim J., Cho S., Huang Y., Bretl T., Rogers J. A., Adv. Mater. 2016, 28, 4462. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 404. Kim J., Kim M., Lee M. S., Kim K., Ji S., Kim Y. T., Park J., Na K., Bae K. H., Kyun Kim H., Bien F., Young Lee C., Park J. U., Nat. Commun. 2017, 8, 14997. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 405. Chu B., Burnett W., Chung J. W., Bao Z., Nature 2017, 549, 328. [DOI] [PubMed] [Google Scholar]
- 406. Imani S., Bandodkar A. J., Mohan A. M., Kumar R., Yu S., Wang J., Mercier P. P., Nat. Commun. 2016, 7, 11650. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 407. Lee H., Choi T. K., Lee Y. B., Cho H. R., Ghaffari R., Wang L., Choi H. J., Chung T. D., Lu N., Hyeon T., Choi S. H., Kim D. H., Nat. Nanotechnol. 2016, 11, 566. [DOI] [PubMed] [Google Scholar]
- 408. Krishnan S. R., Ray T. R., Ayer A. B., Ma Y., Gutruf P., Lee K., Lee J. Y., Wei C., Feng X., Ng B., Sci. Transl. Med. 2018, 10, eaat8437. [DOI] [PubMed] [Google Scholar]
- 409. Lee Y., Howe C., Mishra S., Lee D. S., Mahmood M., Piper M., Kim Y., Tieu K., Byun H. S., Coffey J. P., Shayan M., Chun Y., Costanzo R. M., Yeo W. H., Proc. Natl. Acad. Sci. USA 2018, 115, 5377. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 410. Kim J., Salvatore G. A., Araki H., Chiarelli A. M., Xie Z., Banks A., Sheng X., Liu Y., Lee J. W., Jang K.‐I., Sci. Adv. 2016, 2, e1600418. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 411. Tian X., Lee P. M., Tan Y. J., Wu T. L. Y., Yao H., Zhang M., Li Z., Ng K. A., Tee B. C. K., Ho J. S., Nat. Electron. 2019, 2, 243. [Google Scholar]
- 412. Walther A., Adv. Mater. 2020, 32, 1905111. [Google Scholar]
- 413. Zhao Y., Xuan C., Qian X., Alsaid Y., Hua M., Jin L., He X., Sci. Rob. 2019, 4, eaax7112. [DOI] [PubMed] [Google Scholar]
- 414. Preston D. J., Jiang H. J., Sanchez V., Rothemund P., Rawson J., Nemitz M. P., Lee W.‐K., Suo Z., Walsh C. J., Whitesides G. M., Sci. Rob. 2019, 4, eaaw5496. [DOI] [PubMed] [Google Scholar]
- 415. Wehner M., Truby R. L., Fitzgerald D. J., Mosadegh B., Whitesides G. M., Lewis J. A., Wood R. J., Nature 2016, 536, 451. [DOI] [PubMed] [Google Scholar]
- 416. Lee Y., Oh J. Y., Xu W., Kim O., Kim T. R., Kang J., Kim Y., Son D., Tok J. B., Park M. J., Bao Z., Lee T. W., Sci. Adv. 2018, 4, eaat7387. [DOI] [PMC free article] [PubMed] [Google Scholar]