

Abstract
This paper investigates the fixed-time cluster formation tracking (CFT) problem for networked perturbed robotic systems (NPRSs) under directed graph information interaction, considering parametric uncertainties, external perturbations, and actuator input deadzone. To address this complex problem, a novel hierarchical fixed-time neural adaptive control algorithm is proposed based on a hierarchical fixed-time framework and a neural adaptive control strategy. The objective of this study is to achieve accurate CFT of NPRSs within a fixed time. Specifically, we design a distributed observer algorithm to estimate the states of the virtual leader within a fixed time accurately. By using these observers, a neural adaptive fixed-time controller is developed in the local control layer to ensure rapid and reliable system performance. Through the use of the Lyapunov argument, we derive sufficient conditions on the control parameters to guarantee the fixed-time stability of NPRSs. The theoretical results are eventually validated through numerical simulations, demonstrating the effectiveness and robustness of the proposed approach.
Keywords: Cluster formation tracking, Networked perturbed robotic systems, Hierarchical fixed-time neural adaptive
Subject terms: Computer science, Information technology
Introduction
Recently, there has been a growing interest in distributed cooperative control of multi-agent systems due to its various advantages over traditional centralized approaches. These advantages include increased flexibility, decentralization, and stronger robustness1. As a result, this field has given rise to numerous research topics, such as consensus2,3, tracking4,5, distributed formation control6,7, containment8, and flocking9. However, most existing literature in this area focuses on systems with single- or double-integrator dynamics and Lipschitz-type dynamics. Although these dynamics are suitable for many applications, the use of such models may not be sufficiently rigorous for networked robotic systems, which are typical examples of multi-agent systems. Instead, employing Euler–Lagrange dynamics provides a more accurate representation of real-world robotic systems and their interactions. This distinction highlights the need for more specialized and precise control strategies of networked robotic systems.
Therefore, many researchers have been directing their effort toward the collaborative control of networked robotic systems with Euler–Lagrange dynamics10–12. However, the existence of actuator input deadzone, parametric uncertainties, and external perturbations is inevitable in networked perturbed robotic systems (NPRSs). These deadzone characteristics often arise in practical robotic systems due to factors such as friction, backlash, and mechanical wear, which introduce nonlinearities and can significantly impair system performance13,14. In addition, NPRSs exhibit inherent characteristics, such as nonlinearity, susceptibility to uncertainties, and inter-joint couplings, further complicating their analysis and control. To address these difficulties, several control algorithms have been developed, including adaptive control15, fuzzy control16, robust control17, and sliding mode control18. In particular, sliding mode control has gained significant attention due to its potential for achieving finite convergence19–21/fixed-time convergence22–27and robustness in the presence of uncertainties. While finite-time stability ensures convergence within a time frame that depends on the system’s initial conditions, fixed-time stability guarantees convergence regardless of these initial conditions. This key difference enhances system predictability and performance reliability, making fixed-time stability particularly useful in time-critical applications. Significantly, under the framework of finite-time control for switched nonlinear systems with multiple objective constraints, an adaptive finite-time controller based on a multi-dimensional Taylor network is proposed, ensuring constraint compliance and avoiding singularity21. Polyakov et al. have utilized theorems on Lyapunov functions for fixed-time stability analysis to design nonlinear control laws for the robust stabilization of a chain of integrators24. Based on the framework of input-output linearization, the challenge of fixed-time stabilization for nonlinear systems with a full relative degree has been addressed by developing homogeneous feedback laws27. However, achieving fixed-time stability for NPRSs remains an open problem.
Moreover, constructing appropriate equivalent terms to approximate the lumped uncertainty terms of a system is particularly challenging. These uncertainty terms include actuator input deadzone, external perturbations, and parametric uncertainties. Recently, interest in utilizing radial basis function (RBF) neural networks for approximating unknown nonlinear functions has been increasing28,29. In the context of multi-agent systems, the neural network approach presumes that the uncertainties within the system can be accurately approximated by a neural network with adequate capacity and training data. It also presupposes that the dynamics of the multi-agent system can be accurately represented by the neural network to capture the nonlinear characteristics of these uncertainties. Under the neural network-based control strategy, the challenge of fixed-time formation control in nonlinear multi-agent systems has been addressed30. Within the framework of backstepping and utilizing predefined-time stability, the predefined-time adaptive neural tracking control problem for nonlinear multi-agent systems is investigated in31. Hierarchical control strategies, in particular, offer considerable advantages for managing multi-agent systems by enhancing robustness and scalability32,33. By breaking down a global problem into smaller sub-problems, hierarchical framework reduce computational complexity and enhance overall system stability and coordination. Building on this interest, we propose a novel hierarchical fixed-time neural adaptive (HFNA) control algorithm that combines the fixed-time algorithm that uses a hierarchical framework with an RBF neural network. This innovative approach aims to enhance steady-state performance compared with that of conventional methods.
Meanwhile, existing research on cooperative control has focused on cooperative tracking25 and formation tracking34–38, where all robots converge to a single stable state or formation. Specifically, Cheng et al. have investigated single time-varying formation control for heterogeneous multi-agent systems, addressing actuator faults, uncertainties, and perturbations34. Under an adaptive fuzzy control approach combined with a periodic adaptive event-triggered control scheme, single fixed-time formation control for multi-agent systems facing actuator failures is achieved35. Based on a low-complexity control framework ensuring prescribed performance, single formation tracking for networked underactuated surface vessels in a fully quantized environment has been addressed in38. However, these results are not directly applicable to scenarios wherein networked robotic systems are required to perform multiple tasks simultaneously. This motivation has led to research on group consensus39 and multi-tracking40. However, most of the aforementioned studies primarily address state coordination problems in networked robotic systems. By contrast, the current study focuses on the cluster formation tracking (CFT) problem, which involves coordinating the output of subnetworks in an NPRS to form multiple desired formations in local coordinates. Each chosen reference point follows a predefined trajectory in global coordinates while maintaining the formation. In the CFT control task scenario of NPRSs, as shown in Fig. 1, it becomes indispensable to study the fixed-time problem in CFT of NPRSs. This is particularly important when considering actuator input deadzone, external perturbations, and parametric uncertainties, as it addresses a fundamental challenge in the control of networked robotic systems.
Fig. 1.
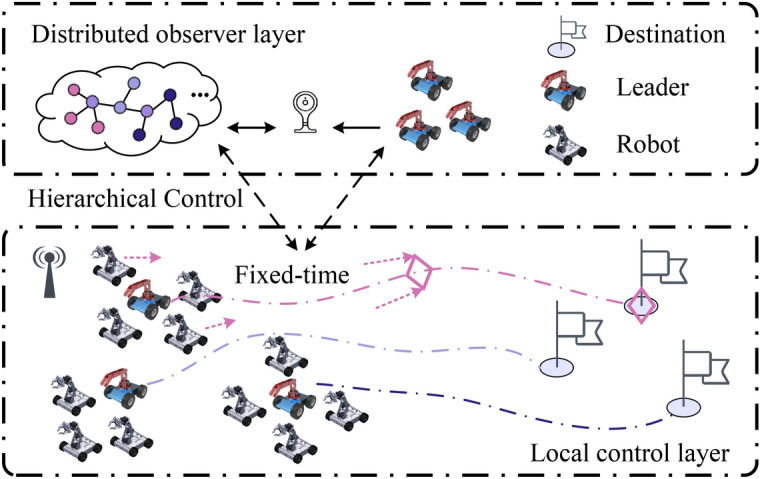
Cluster formation tracking control scenario of NPRS.
Motivated by the aforementioned discussions, this paper introduces the HFNA control algorithm, specifically crafted to address the intricate challenges of fixed-time CFT in NPRSs. By focusing on key issues such as parametric uncertainties, external perturbations, and actuator input deadzone, the HFNA algorithm aims to enhance the robustness and effectiveness of multi-robot coordination. The following are the main contributions of this paper.
In contrast with prior research on the finite-time stability of NPRSs, where error states typically reach the origin within a finite time that is dependent on the initial condition19–21, we propose a novel HFNA control algorithm that achieves fixed-time stability independent of the initial condition, ensuring a controllable convergence time, which enhances the predictability and reliability of the system’s performance.
The proposed HFNA control algorithm provides a comprehensive framework for fixed-time CFT under directed graphs, addressing key challenges in existing studies34,36,38,41 by systematically managing parametric uncertainties, external perturbations, and actuator input deadzone.
Different from the conventional fixed-time control algorithms for networked robotic systems26,27, the HFNA control algorithm effectively addresses lumped uncertainty terms while exhibiting minimal chattering by utilizing RBF neural networks to approximate the lumped uncertainty.
The remaining sections are organized in the following sequence. Section Preliminaries provides preliminaries on graph theory, stability theory, neural networks, function approximation, systems, and problems. Section Major results describes the designed HFNA control algorithm with the corresponding convergence analysis. Section Simulations presents the simulation results. Eventually, a concise summary of conclusions is provided in Section Conclusion.
Notations: Let be the d-dimensional Euclidean space. represents a real matrix. denotes the Kronecker product. refers to a d-dimensional vector with elements equal to 1. The symbols and denote maximum and minimum magnitudes, respectively. represents the p-norm. Moreover, the column vectors , , and . For the provided and , it follows that and .
Preliminaries
Graph theory
In this paper, we consider a NPRS comprising N robots. The communication topology in NPRS is crucial, as it defines how robots exchange information. This topology forms the foundation for both the formulation of the control problem and the control design. To represent these interactions, we introduce a directed graph , where denotes the set of vertices representing the robots, is the edge set, and is the adjacency matrix. represents the direct information flow from robot j to robot i. More precisely, we establish to represent cooperation between robot i and robot j; to indicate competition; otherwise, signifies no interaction. In addition, the directed graph is acyclic, i.e., . denotes the neighbor set of robot i. The Laplacian matrix of is defined such that and for . Moreover, can be partitioned into subnetworks denoted by with each comprising robots, where , for all , and . Specifically, is utilized to describe the nodes of the kth subnetwork with . Besides, each subnetwork has corresponding virtual leaders. The interactions among robots and virtual leaders are captured by the diagonal weighted matrix . When the ith robot is able to receive information from its virtual leader, we have ; otherwise, . Let represent the diagonal weighted matrix associated with . Then, .
Assumption 1
The directed graph can be partitioned into a sequence such that no cycles occur within this partition. Within each subnetwork, the information of the virtual leader is accessible to all individuals globally.
Assumption 2
For any given and , the sum of the connection weights between robot i and the robots in subnetwork m is equal to zero to ensure that the interaction in subnetwork m is balanced in terms of its influence on NPRS, i.e., , where and .
Remark 1
Unlike previous work on single formation34,36–38, which may not explicitly enforce an acyclic structure within a partition, Assumption 1 ensures that information from the virtual leader is accessible to all individuals globally within each subnetwork. Assumption 2 means that the sum of connection weights between robot i and robots in subnetwork m equals zero, not requiring the sum of weights within each subnetwork to be zero. Negative edge weights represent inhibitory constraints on interactions among robots. They are included to illustrate scenarios where interactions within a subnetwork offset each other, resulting in a neutral effect on a specific robot’s behavior.
Finite- and fixed-time stability
Imagine a differential system in the following manner:
| 1 |
where represents the system state, denotes a nonlinear function, and is the initial state.
Definition 1
10 System (1) is considered to exhibit finite-time stability if it satisfies the conditions of Lyapunov stability and there exists a settling time function such that for . Unlike autonomous systems, the Lyapunov function V(z, t) and the stability conditions explicitly depend on time, incorporating additional terms to reflect this time dependency.
Definition 2
22 System (1) is characterized as fixed-time stability if it satisfies the conditions of finite-time stability and a settling time function that is bounded by a constant exists. In simpler terms, there exists a maximum settling time such that , and , .
Lemma 1
22 Given a system described as system (1), if a continuous positive-definite function V(z) satisfies the condition
where , , , , , and are positive odd integers that satisfy and . In such case, the origin of the system is a globally fixed-time stable equilibrium, with the settling time function limited by
Furthermore, if , we can obtain a less conservative estimate of the time functionas
Neural network principle
As depicted in Fig. 2, the RBF neural network is typically characterized by the neural structure that consists of an input layer, a hidden layer, and an output layer. The primary purposes of these layers are as follows: the input layer is responsible for receiving external information, the hidden layer performs nonlinear transformations, and the output layer provides the final output information. RBF neural networks are a suitable choice in this scenario due to their capability to estimate unknown nonlinear functions effectively23. Therefore, we employ RBF neural networks to estimate a nonlinear function .
Fig. 2.
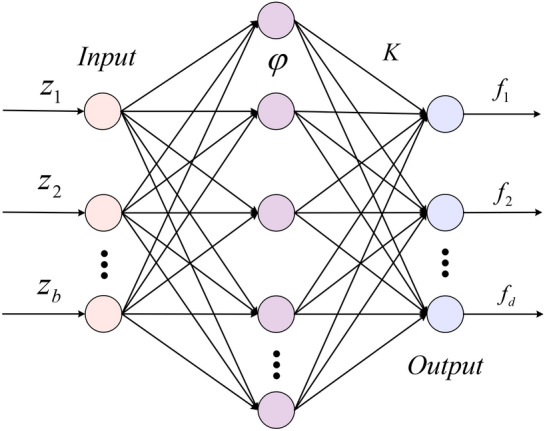
RBF neural network.
The RBF neural network approximates the function g(z) as follows:
where the weight matrix consists of the weights of m neurons, and the input data vector is denoted as . The approximation error of a RBF neural network is represented by . To derive this, consider the basis function , defined as:
where is the center of the jth neuron and represents the width of this neuron. A practical rule for choosing the width for each neuron based on the distance between the centers can be expressed as:
The width of a neuron remains a positive constant when the neuron is a hidden neuron. This ensures that each neuron’s receptive field overlaps with its neighbors, providing smooth transitions and improved approximation capabilities.
The RBF network’s output is a linear combination of these basis functions weighted by the matrix K. This can be expressed as:
where is the weight vector associated with the jth neuron.
By minimizing the approximation error between the actual function g(z) and the observed function , the weights K are adjusted to ensure that the RBF neural network can approximate g(z) as accurately as possible. This is typically done through a learning algorithm such as gradient descent.
System statement
In this scenario, we examine an example that involves a NPRS that consists of N robots. The dynamics and kinematics of the ith robot can be represented by
| 2 |
where the position, velocity, and acceleration vectors of the robot are denoted as , and , respectively. represents the robotic inertia matrix. denotes the Coriolis centrifugal matrix. represents the gravitational torque. represents external perturbations that affect the robot. includes the calculated control signals. is the deadzone function of the input torque, i.e.,
where the constants and represent the bounds of the deadzone. In addition, and refer to the uncertain deadzone functions. Furthermore, to account for parametric uncertainties, the unknown can be decomposed into two components: , where denotes an unknown continuous error function. Accounting for the presence of parametric uncertainties, the dynamical terms take the form of
where the terms , , and are known and provided by the user, directly usable for control design. By contrast, , , and are uncertain terms that arise due to inevitable measurement errors in practical applications. Consequently, System (2) can be reformulated as follows:
| 3 |
where the consideration of lumped uncertainty terms encompasses the effects of parametric perturbations , , and , as well as external disturbances , and actuator input deadzone . Utilizing RBF neural networks, can be represented as follows:
| 4 |
where represents the weight matrix associated with m neurons. The input vector is denoted as . Furthermore, represents the neural network approximation error, assumed to be bounded, i.e., , is a positive constant. In this case, represents the Gaussian function associated with the RBF neural network, and
represents the center of the jth neuron, while denotes the width of the same neuron.
Subsequently, NPRS (3) can be reformulated as follows:
| 5 |
Notably, the following salient properties distinctly characterize the model of NPRS (2).
Property 1
The inertia matrix is known to possess the properties of symmetry and positive definiteness.
Property 2
The matrix exhibits the property of skew-symmetry.
Furthermore, with regard to the kth subnetwork, the dynamics of the virtual leader’s trajectory are given by
where , and represent the position, velocity, and acceleration vectors of the kth virtual leader, respectively, . Here, we present a justifiable assumption that concerns the virtual leaders.
Assumption 3
Acceleration is bounded by a nonnegative constant , such that .
Remark 2
RBF networks are particularly advantageous for our application due to their universal approximation capabilities, enabling accurate approximation of continuous functions with sufficient neurons in the hidden layer. This makes them effective for modeling and compensating for system nonlinearities and uncertainties. Additionally, RBF networks are well-suited for capturing complex, nonlinear disturbances that are challenging for observer techniques. Their effectiveness in similar applications has been demonstrated in previous studies23,28,29, further supporting our choice.
Remark 3
The NPRS (2) can be extended to form a mobile manipulator when integrated with a mobile platform. This system comprises a nonholonomic mobile base and a holonomic manipulator. Specifically, consider a two-wheel-driven mobile platform operating under non-slip conditions. When factoring in parametric uncertainties, the system’s dynamics can be written as:
where , , ,  , , with denoting the constraint matrix, as the transformation matrix, and representing the Lagrange multiplier.
, , with denoting the constraint matrix, as the transformation matrix, and representing the Lagrange multiplier.
Problem formulation
The primary focus is to investigate the fixed-time CFT problem of NPRSs described below. The following form of problem definition is provided using the principle of fixed-time stability.
Definition 3
The achievement of the fixed-time CFT problem of NPRSs is determined by the existence of a settling time , which remains independent of the initial condition, such that
where and are the robot’s position and velocity defined in formula (2), and denotes the ith robot’s formation offset.
Remark 4
In the practical application of CFT for the NPRS, uncertain factors, such as device precision, actuator limitations, and variations in operating conditions, inevitably result in negative effects, such as reduced control accuracy and difficulties in determining the time when the system becomes stable. Consequently, considering actuator input deadzone, parametric uncertainties, and external perturbations, becomes of paramount importance.
Major results
This section introduces a new HFNA control algorithm tailored to address the CFT problem for NPRSs while ensuring fixed-time convergence capability. Additionally, the effectiveness of the algorithm is verified by the following stability analysis.
HFNA control algorithm
In this subsection, we present the HFNA control algorithm for NPRSs. Before proceeding further, we define , , and , where , , and are the observations of , , and , respectively. Moreover, we design a fixed-time sliding vector as follows:
where , , , , and are positive odd integers that satisfy , , and . and are positive constants.
In this manner, let and . In the presence of actuator input deadzone, parametric uncertainties and external perturbations, the HFNA control algorithm is formulated in the following manner:
| 6 |
| 7 |
where , , , and are positive constants, and is given as a scalar gain. , and , is given by the expression in (4). The hierarchical framework of the proposed HFNA control algorithm is illustrated in Fig. 3, providing a clear depiction of its structure.
Fig. 3.
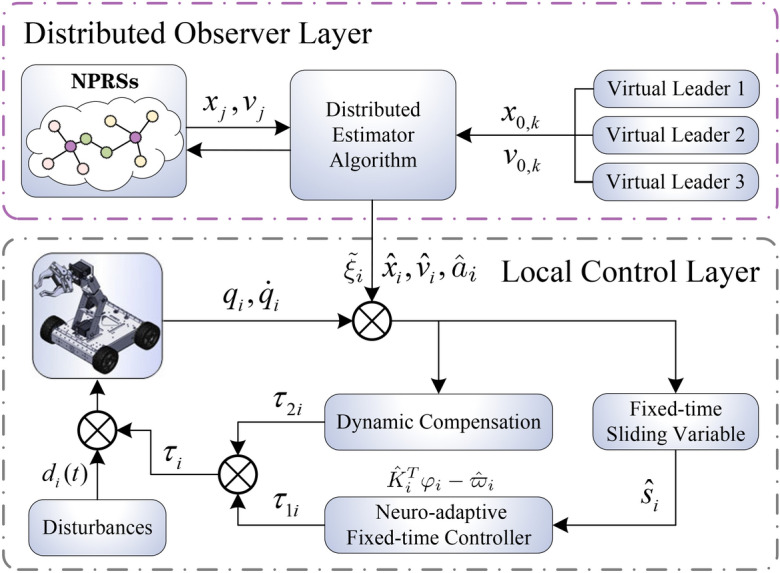
Hierarchical control framework for NPRSs.
Remark 5
The control algorithm given in (6) demonstrates considerable physical significance. To elaborate further, represents the robust control term for addressing the challenges posed by actuator input deadzone, parametric uncertainties, and external perturbations. corresponds to an equivalent control designed for NPRSs to process known information. Additionally, the update laws and in the neural adaptive control serve as effective approximations for dealing with the complexities introduced by the actuator input deadzone, parametric uncertainties, and external perturbations.
Remark 6
The proposed HFNA control algorithm consists of a local control layer (i.e., (6)) and a distributed observer layer (i.e., (7)). Its hierarchical architecture decomposes the control task into multiple levels, allowing each layer to handle specific aspects of the control problem. This structured decomposition enables smoother transitions between control actions, minimizing abrupt control signal changes, which helps reduce the high-frequency switching that typically leads to chattering in conventional sliding mode control. Furthermore, the adaptive neural network components continuously adjust control parameters in response to real-time system dynamics. This adaptability enables more precise and gradual modifications, mitigating the need for aggressive switching and further reducing chattering. Together, the hierarchical design and adaptive neural network enhance the robustness of the control strategy against parametric uncertainty and external perturbations, ensuring stable and reliable performance.
Analysis for the distributed observer
In this subsection, we validate the performance of the proposed distributed observer algorithm in addressing the fixed-time CFT problem.
Theorem 1
Under the assumptions of Assumption 1-3, and with the proposed distributed observer algorithm (7), if the conditions are satisfied as
| 8 |
| 9 |
where , and . Then, the states of the virtual leaders are effectively observed within a fixed time , i.e.,, and , when, .
Proof
First, the distributed observer tracking error vectors for are defined as follows:
Let , the compact representations of , , and are as follows:
Thus, we can obtain the compact form . Furthermore, substituting the proposed HFNA control algorithm (6), (7) into (5) obtains the cascade closed-loop system as follows:
| 10 |
where ,
In the closed-loop system (10), given that is defined, taking linear transformations yields
| 11 |
It’s worth noting that . Then, it can be derived that
| 12 |
Consider the positive-definite Lyapunov function candidate defined as
| 13 |
Further, taking the derivative of the function , it can be derived that
| 14 |
Thus, when fixed-time and is bounded by
| 15 |
In addition, if , a less conservative approximation can be derived as follows:
Remark 7
The result from Theorem 1, , and , when , and  can be easily obtained , , and , , .
can be easily obtained , , and , , .
Analysis of fixed-time CFT
In this subsection, we demonstrate the effectiveness of the presented algorithm in solving the fixed-time CFT problem, building upon the result established in Theorem 1.
Theorem 2
By applying the proposed HFNA control algorithm (6)–(7) to the system (5), and under the condition that
| 16 |
where and , the fixed-time CFT problem (Definition3) in NPRSs is successfully solved.
Proof
The theorem demonstrates that and can track their corresponding observer terms and within a fixed time. First, the distributed tracking errors are defined as and . The analysis then focuses on the convergence of the fixed-time sliding vector . To facilitate this analysis, a Lyapunov function candidate is introduced, followed by a detailed convergence analysis.
| 17 |
Consider that is defined in the closed-loop system (10), the derivative of can be expressed as follows:
| 18 |
where . Then, (18) can be rewritten as
| 19 |
where is defined in (4). In accordance with (16), we obtain that
| 20 |
where is defined in (6). The inequality above indicates that is negative definite, ensuring the convergence of for all . Alternatively, the selected Lyapunov function candidate is as follows for the neural adaptive laws:
| 21 |
Given the positive constants and , the function is positive definite. Furthermore, we can deduce from (6), (16), and the previous analysis that and . The derivative of is then expressed as follows:
| 22 |
Thus, it follows that
| 23 |
On the basis of the analysis of (19) and (20), which shows that , and considering the closed-loop dynamics (10), we can conclude that . Additionally, the boundedness of defined in (4) implies that . By applying Barbalat’s lemma10 and combining it with the previous analysis, we further deduce that and as . This finding demonstrates the effectiveness of the neural adaptive law, allowing the use of smaller and reducing the chattering phenomenon.
With regard to (16), obtaining knowledge of may be challenging in practical applications. In such scenarios, a practical solution is to choose a suitably large to ensure the stability condition. This solution results in the following reformulation of (19):
| 24 |
By utilizing Lemma 1 and the expression in (24), the distributed tracking errors and evidently reach the manifold within the fixed time . Then, is defined as follows:
| 25 |
Drawing upon the preceding analysis and fixed-time sliding mode control theory22, a conclusion can be readily drawn that and achieve convergence to the origin within the fixed time . In particular, it follows from (25) that
| 26 |
In addition, if , a less conservative bound can be obtained as
| 27 |
The second step validates the successful resolution of the fixed-time CFT problem. Before proceeding, let and , where and represent the position and velocity tracking errors of the robots, respectively. Applying the Triangle Inequality, it can be obtained that
where . Therefore, the problem defined in Definition 3 is effectively resolved, concluding the proof.
Remark 8
We choose to represent the total time required for system convergence, which includes the time associated with the distributed observer layer and the time related to the local control layer. This approach ensures that the cumulative nature of the convergence times across different stages is fully considered, encompassing all phases of the convergence process. By contrast, using would imply that the convergence time is determined solely by the longer duration of either the distributed observer layer or the local control layer. This choice assumes that one stage completes immediately after the other, disregarding potential overlaps or the possibility of collaborative convergence between the stages.
Simulations
This section depicts the efficacy of the HFNA control algorithm outlined in Algorithm 1 through simulation.
Algorithm 1.

HFNA control
The NPRS comprises ten identical follower robots (2-DOF) and three virtual leaders (simplified leader representations). Moreover, the interactions of the NPRS are illustrated in Fig. 4. The Laplacian matrix can be computed as
Additionally, the physical parameters of the NPRS are selected in Table 1. The observations of the physical parameters of the NPRS are selected in Table 2. The dynamics descriptions is given by
In more detail, , , ,  , ,
, ,  . We select the standard gravitational torque as . Furthermore, the detailed description of the corresponding parameters is provided below. to are given as , , , , , and , .
. We select the standard gravitational torque as . Furthermore, the detailed description of the corresponding parameters is provided below. to are given as , , , , , and , .
Fig. 4.
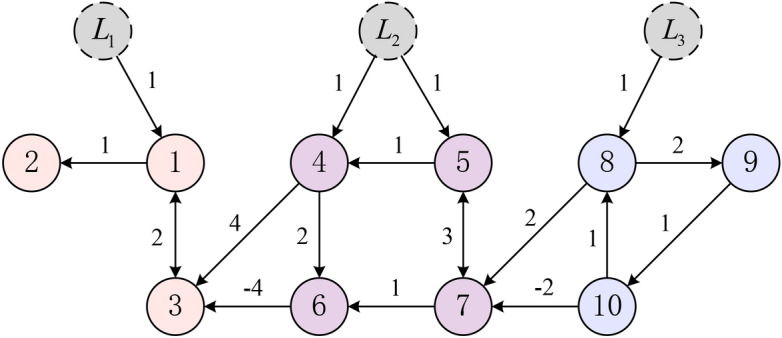
Directed graph representing the NPRS network.
Table 1.
Physical parameters of the robot.
| Mass () | Length () | COM () |
|---|---|---|
Table 2.
The observations of the physical parameters.
| Mass () | Length () | COM () |
|---|---|---|
Under Assumption 3, the trajectory of the virtual leaders, labeled as , , and , are selected as
Furthermore, we present the parameters used in the HFNA control algorithm (6)–(7). To ensure the establishment of (8) and (9), the following parameter values are used: (, , ), (, , ), , , , and . Besides, the parameters of the neural adaptive laws are specified as and . The neural networks comprise 10 neurons, where the centers are evenly distributed in the range , with widths . We choose ,  , and , to make (16) holds. Furthermore, the external perturbations is chosen as . Besides, the formation offsets are set to ,
, and , to make (16) holds. Furthermore, the external perturbations is chosen as . Besides, the formation offsets are set to ,  , , , , , , , . Here, the input deadzone function of the robotic manipulator is denoted as
, , , , , , , . Here, the input deadzone function of the robotic manipulator is denoted as
The initial states and are randomly assigned within the ranges of and , respectively.
Remark 9
The comparative analysis provided in Table 3 offers a thorough evaluation of our proposed control algorithm in relation to several established methods20,33,34,37,38. This analysis emphasizes the advantages of our approach, particularly in key performance areas such as convergence time, hierarchical control, deadzone compensation, uncertainty treatment, and formation task. By highlighting these aspects, we demonstrate the practical benefits of our method, ensuring a more comprehensive understanding of its effectiveness in addressing complex control challenges.
Table 3.
Comparison of related literature.
| References | CT | HC | DC | UT | FT |
|---|---|---|---|---|---|
| Meng et al.20 | Finite | No | No | Fuzzy | No |
| Shi and Hu33 | Finite | Yes | No | No | No |
| Cheng et al.34 | Fixed | No | No | Observer | Single |
| Ding et al.37 | Practical fixed | Yes | No | Observer | Cluster |
| Yoo and Park38 | Fixed | No | No | No | Single |
| Our | Fixed | Yes | Yes | RBF | Cluster |
CT convergence time, HC hierarchical control, DC deadzone compensation, UT uncertainty treatment, FT formation task.
are presented in Figs. 5, 6, 7, 8, 9, 10 and 11, depicting the fixed-time CFT trajectories of the NPRS on the XY plane for 10 robots (Fig. 5). The efficacy of the proposed HFNA control algorithm (6)–(7) in achieving excellent fixed-time CFT performance of the NPRS is evident from the outcomes. In detail, from (c)–(d) in Figs. 6 and 7, the position observers converge to for all within the fixed time . Additionally, (a)–(b) in Figs. 6 and 7 reveal the attainment of fixed-time convergence of , , through the designed HFNA control algorithm. Using the parameters we set, the fixed settling time of the distributed observer layer (based on (15)), and the fixed settling time of the local layer (based on (26)). Therefore, the total fixed-time convergence is . Meanwhile, from Fig. 7, for are bounded within the range of in a fixed time . Similarly, Fig. 8 demonstrates the tracking performance of the velocities. Additionally, Fig. 9 provides evidence of the stability of the neural adaptive parameters. Figure 10 illustrates the evolution of the RBF neural network approximation error. As shown, the neural network approximation error gradually converges to zero. This result demonstrates that the RBF network effectively approximates the lumped uncertainties, thereby ensuring the accuracy of the control algorithm and the stability of the overall system. In Fig. 11b, the control input torque for the 1st robot is bounded, minimizing the impact of minor input fluctuations and resulting in smoother control inputs as well as improved overall system performance. Overall, the simulation results validate the effectiveness and accuracy of the HFNA control algorithm.
Fig. 5.

Trajectories of NHRS with a constant cluster formation configuration under different initial conditions. Note: The intersections of the trajectories in this figure do not occur simultaneously. The robots do not occupy the same position at the same time, hence avoiding any potential collisions.
Fig. 6.

(a, b) Illustrate the evolution of the error term (), representing the difference between the actual and reference trajectories. (c, d) display the evolution of the observed state , showing how the state observation evolves over time.
Fig. 7.

(a, b) Show the overall position error , illustrating the deviation between the actual and desired positions. (c, d) describe the evolution of the state observation error in the distributed observer layer. Finally, (e, f) display the evolution of the position error in the local control layer.
Fig. 8.

(a, b) Illustrate the velocity errors associated with cluster formation tracking, highlighting the discrepancies between the desired and actual velocities of the robots throughout the formation process.
Fig. 9.

(a, b) Illustrate the neural adaptive parameters of the 1st subnetwork. (c, d) display the neural adaptive parameters of the 2nd subnetwork. (e, f) present the neural adaptive parameters of the 3rd subnetwork.
Fig. 10.

(a, b) illustrate the convergence of the RBF neural network approximation error during the approximation of for coordinates 1 and 2.
Fig. 11.

(a) Control input torque for coordinates 1 and 2 of the first robot without considering actuator input deadzone compensation. The comparison algorithm applied in the figure (a) is derived from reference23. (b) Control input torque for coordinates 1 and 2 of the first robot while considering actuator input deadzone compensation.
Conclusion
The fixed-time CFT control problem in NPRSs was successfully addressed by considering actuator input deadzone, parametric uncertainties, and external perturbations. To address this challenging problem, a novel HFNA control algorithm, which comprised a distributed observer algorithm and a neural-adaptive fixed-time controller in the local control layer, was proposed. The simulation results demonstrated that the robots in a NPRS effectively achieved the fixed-time CFT control task, validating the feasibility of the HFNA control algorithm. Furthermore, the bipartite CFT control problem of NPRSs, which incorporates cooperative and antagonistic interconnections, can handle more complex control tasks. Consequently, our future work will be dedicated to exploring the CFT control for bipartite consensus and mobile manipulators.
Acknowledgements
This work was supported by the National Natural Science Foundation of China under Grant 62073301 and Grant 62403187; China Private Education Association Annual Planning Project under Grant CANFZG23047 and Grant CANFZG23048; China Higher Education Association Higher Education Scientific Research Project under Grant 23XXK0403; Hubei Provincial Department of Education Research Project under Grant B2023316; General Project of Scientific Research of Wuhan Technology and Business University under Grant 2023Y22 and Grant A2024041; Academic Team of Wuhan Technology and Business University under Grant WPT2023055; Special Fund of Advantageous and Characteristic Disciplines (Group) of Hubei Province.
Author contributions
X.L., K.-L.H., J.-Z.X.: Conceptualization, Methodology, Investigation and Validation. X.L., C.-D.L., Q.C.: Writing-original draft, Formal analysis. M.-F.G., K.-L.H., C.-D.L.: Supervision, Writing-Review & Editing.
Data availability
Simulation programmes are available from the corresponding author on reasonable request.
Declarations
Competing interests
The authors declare that there are no conflict of interest.
Footnotes
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
References
- 1.Olfati-Saber, R. & Murray, R. M. Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. Automatic Control49(9), 1520–1533. 10.1109/TAC.2004.834113 (2004). [Google Scholar]
- 2.Jin, X., Lü, S. & Yu, J. Adaptive NN-based consensus for a class of nonlinear multiagent systems with actuator faults and faulty networks. IEEE Trans. Neural Netw. Learn. Syst.33(8), 3474–3486. 10.1109/TNNLS.2021.3053112 (2021). [DOI] [PubMed] [Google Scholar]
- 3.Stiti, C. et al. Lyapunov-based neural network model predictive control using metaheuristic optimization approach. Sci. Rep.14(1), 18760. 10.1038/s41598-024-69365-9 (2024). [DOI] [PMC free article] [PubMed] [Google Scholar]
- 4.Deng, C., Wen, C., Wang, W., Li, X. & Yue, D. Distributed adaptive tracking control for high-order nonlinear multiagent systems over event-triggered communication. IEEE Trans. Autom. Control68(2), 1176–1183. 10.1109/TAC.2022.3148384 (2022). [Google Scholar]
- 5.Tang, M., Tang, K., Zhang, Y., Qiu, J. & Chen, X. Motion/force coordinated trajectory tracking control of nonholonomic wheeled mobile robot via LMPC-AISMC strategy. Sci. Rep.14(1), 18504. 10.1038/s41598-024-68757-1 (2024). [DOI] [PMC free article] [PubMed] [Google Scholar]
- 6.Li, W., Zhang, H., Cai, Y. & Wang, Y. Fully distributed formation control of general linear multiagent systems using a novel mixed self-and event-triggered strategy. IEEE Trans. Syst. Man Cybern. Syst.52(9), 5736–5745. 10.1109/TSMC.2021.3129469 (2021). [Google Scholar]
- 7.Cajo, R. et al. Distributed formation control for multiagent systems using a fractional-order proportional-integral structure. IEEE Trans. Control Syst. Technol.29(6), 2738–2745. 10.1109/TCST.2021.3053541 (2021). [Google Scholar]
- 8.Liu, Y., Zhang, H., Shi, Z. & Gao, Z. Neural-network-based finite-time bipartite containment control for fractional-order multi-agent systems. IEEE Trans. Neural Netw. Learn. Syst.34(10), 7418–7429. 10.1109/TNNLS.2022.3143494 (2023). [DOI] [PubMed] [Google Scholar]
- 9.Xiao, J., Yuan, G., He, J., Fang, K. & Wang, Z. Graph attention mechanism based reinforcement learning for multi-agent flocking control in communication-restricted environment. Inf. Sci.620, 142–157. 10.1016/j.ins.2022.11.059 (2023). [Google Scholar]
- 10.Li, Y., Li, Y. X. & Tong, S. Event-based finite-time control for nonlinear multi-agent systems with asymptotic tracking. IEEE Trans. Autom. Control68(6), 3790–3797. 10.1109/TAC.2022.3197562 (2023). [Google Scholar]
- 11.Dong, Y. & Chen, Z. Fixed-time synchronization of networked uncertain Euler–Lagrange systems. Automatica146, 110571. 10.1016/j.automatica.2022.110571 (2022). [Google Scholar]
- 12.Ding, T. F., Ge, M. F., Xiong, C. H., Park, J. H. & Li, M. Second-order bipartite consensus for networked robotic systems with quantized-data interactions and time-varying transmission delays. ISA Trans.108, 178–187. 10.1016/j.isatra.2020.08.026 (2021). [DOI] [PubMed] [Google Scholar]
- 13.Zhang, Y., Kong, L., Zhang, S., Yu, X. & Liu, Y. Improved sliding mode control for a robotic manipulator with input deadzone and deferred constraint. IEEE Trans. Syst. Man Cybern. Syst.53(12), 7814–7826. 10.1109/TSMC.2023.3301662 (2023). [Google Scholar]
- 14.Wu, Y., Niu, W., Kong, L., Yu, X. & He, W. Fixed-time neural network control of a robotic manipulator with input Deadzone. IEEE Trans. Syst. Man Cybern. Syst.135, 449–461. 10.1016/j.isatra.2022.09.030 (2023). [DOI] [PubMed] [Google Scholar]
- 15.Zhang, J., Zhang, H., Zhang, K. & Cai, Y. Observer-based output feedback event-triggered adaptive control for linear multiagent systems under switching topologies. IEEE Trans. Neural Netw. Learn. Syst.33(12), 7161–7171. 10.1109/TNNLS.2021.3084317 (2021). [DOI] [PubMed] [Google Scholar]
- 16.Li, Y., Li, K. & Tong, S. An observer-based fuzzy adaptive consensus control method for nonlinear multiagent systems. IEEE Trans. Fuzzy Syst.30(11), 4667–4678. 10.1109/TFUZZ.2022.3154433 (2022). [Google Scholar]
- 17.Yang, R., Liu, L. & Feng, G. Event-triggered robust control for output consensus of unknown discrete-time multiagent systems with unmodeled dynamics. IEEE Trans. Cyber.52(7), 6872–6885. 10.1109/TCYB.2020.3034697 (2020). [DOI] [PubMed] [Google Scholar]
- 18.Jin, Z., Wang, Z. & Zhang, X. Cooperative control problem of Takagi–Sugeno fuzzy multiagent systems via observer based distributed adaptive sliding mode control. J. Franklin Inst.359(8), 3405–3426. 10.1016/j.jfranklin.2022.03.024 (2022). [Google Scholar]
- 19.Liu, Y., Zhu, Q., Zhao, N. & Wang, L. Fuzzy approximation-based adaptive finite-time control for nonstrict feedback nonlinear systems with state constraints. Inf. Sci.548, 101–117. 10.1016/j.ins.2020.09.042 (2021). [Google Scholar]
- 20.Meng, B., Liu, W. & Qi, X. Disturbance and state observer-based adaptive finite-time control for quantized nonlinear systems with unknown control directions. J. Franklin Inst.359(7), 2906–2931. 10.1016/j.jfranklin.2022.02.033 (2022). [Google Scholar]
- 21.He, W. J., Zhu, S. L., Li, N. & Han, Y. Q. Adaptive finite-time control for switched nonlinear systems subject to multiple objective constraints via multi-dimensional Taylor network approach. ISA Trans.136, 323–333. 10.1016/j.isatra.2022.10.048 (2023). [DOI] [PubMed] [Google Scholar]
- 22.Zuo, Z., Tian, B., Defoort, M. & Ding, Z. Fixed-time consensus tracking for multiagent systems with high-order integrator dynamics. IEEE Trans. Autom. Control63(2), 563–570. 10.1109/TAC.2017.2729502 (2017). [Google Scholar]
- 23.Xu, J. Z., Ge, M. F., Ding, T. F., Liang, C. D. & Liu, Z. W. Neuro-adaptive fixed-time trajectory tracking control for human-in-the-loop teleoperation with mixed communication delays. IET Control Theory Appl.14(19), 3193–3203. 10.1049/iet-cta.2019.1479 (2020). [Google Scholar]
- 24.Polyakov, A., Efimov, D. & Perruquetti, W. Finite-time and fixed-time stabilization: Implicit Lyapunov function approach. Automatica51, 332–340. 10.1016/j.automatica.2014.10.082 (2015). [Google Scholar]
- 25.Koo, Y. C., Mahyuddin, M. N. & Ab Wahab, M. N. Novel control theoretic consensus-based time synchronization algorithm for WSN in industrial applications: Convergence analysis and performance characterization. IEEE Sens. J.23(4), 4159–4175. 10.1109/JSEN.2022.3231726 (2023). [Google Scholar]
- 26.Bai, W., Liu, P. X. & Wang, H. Neural-network-based adaptive fixed-time control for nonlinear multiagent non-affine systems. IEEE Trans. Neural Netw. Learn. Syst.35(1), 570–583. 10.1109/TNNLS.2022.3175929 (2024). [DOI] [PubMed] [Google Scholar]
- 27.Polyakov, A. & Krstic, M. Finite-and fixed-time nonovershooting stabilizers and safety filters by homogeneous feedback. IEEE Trans. Autom. Control68(11), 6434–6449. 10.1109/TAC.2023.3237482 (2023). [Google Scholar]
- 28.Liu, W. & Zhao, T. An active disturbance rejection control for hysteresis compensation based on neural networks adaptive control. ISA Trans.109, 81–88. 10.1016/j.isatra.2020.10.019 (2021). [DOI] [PubMed] [Google Scholar]
- 29.Guo, Q. & Chen, Z. Neural adaptive control of single-rod electrohydraulic system with lumped uncertainty. Mech. Syst. Signal Process.146, 106869. 10.1016/j.ymssp.2020.106869 (2021). [Google Scholar]
- 30.Cao, L., Cheng, Z., Liu, Y. & Li, H. Event-based adaptive NN fixed-time cooperative formation for multiagent systems. IEEE Trans. Neural Netw. Learn. Syst.35(5), 6467–6477. 10.1109/TNNLS.2022.3210269 (2022). [DOI] [PubMed] [Google Scholar]
- 31.Pan, Y., Ji, W., Lam, H. K. & Cao, L. An improved predefined-time adaptive neural control approach for nonlinear multiagent systems. IEEE Trans. Autom. Sci. Eng.10.1109/TASE.2023.3324397 (2023). [Google Scholar]
- 32.Wang, X., Xu, Y., Cao, Y. & Li, S. A hierarchical design framework for distributed control of multi-agent systems. Automatica160, 111402. 10.1016/j.automatica.2023.111402 (2024). [Google Scholar]
- 33.Shi, Y. & Hu, J. Finite-time hierarchical containment control of heterogeneous multi-agent systems with intermittent communication. IEEE Trans. Circ. Syst. II Express Briefs71(9), 4211–4215. 10.1109/TCSII.2024.3379228 (2024). [Google Scholar]
- 34.Cheng, W., Zhang, K., Jiang, B. & Ding, S. X. Fixed-time fault-tolerant formation control for heterogeneous multi-agent systems with parameter uncertainties and disturbances. IEEE Trans. Circ. Syst. I Regul. Pap.68(5), 2121–2133. 10.1109/TCSI.2021.3061386 (2021). [Google Scholar]
- 35.Wang, J. et al. Fixed-time formation control for uncertain nonlinear multiagent systems with time-varying actuator failures. IEEE Trans. Fuzzy Syst.32(4), 1965–1977. 10.1109/TFUZZ.2023.3342282 (2024). [Google Scholar]
- 36.Li, Q., Wei, J., Gou, Q. & Niu, Z. Distributed adaptive fixed-time formation control for second-order multi-agent systems with collision avoidance. Inf. Sci.564, 27–44. 10.1016/j.ins.2021.02.029 (2021). [Google Scholar]
- 37.Ding, T. F., Ge, M. F., Liu, Z. W., Chi, M. & Ahn, C. K. Cluster time-varying formation-containment tracking of networked robotic systems via hierarchical prescribed-time ESO-based control. IEEE Trans. Netw. Sci. Eng.11(1), 566–577. 10.1109/TNSE.2023.3302011 (2023). [Google Scholar]
- 38.Yoo, S. J. & Park, B. S. Approximation-free design for distributed formation tracking of networked uncertain underactuated surface vessels under fully quantized environment. Nonlinear Dyn.111(7), 6411–6430. 10.1007/s11071-022-08169-w (2023). [Google Scholar]
- 39.Li, X., Yu, Z., Li, Z. & Wu, N. Group consensus via pinning control for a class of heterogeneous multi-agent systems with input constraints. Inf. Sci.542, 247–262. 10.1016/j.ins.2020.05.085 (2021). [Google Scholar]
- 40.Huang, D., Jiang, H., Yu, Z., Hu, C. & Fan, X. Cluster-delay consensus in MASs with layered intermittent communication: A multi-tracking approach. Nonlinear Dyn.95, 1713–1730. 10.1007/s11071-018-4604-4 (2019). [Google Scholar]
- 41.Dao, P. N., Nguyen, V. Q. & Duc, H. A. N. Nonlinear RISE based integral reinforcement learning algorithms for perturbed Bilateral Teleoperators with variable time delay. Neurocomputing605(7), 128355. 10.1016/j.neucom.2024.128355 (2024). [Google Scholar]
Associated Data
This section collects any data citations, data availability statements, or supplementary materials included in this article.
Data Availability Statement
Simulation programmes are available from the corresponding author on reasonable request.