

Abstract
In the present research, 6-month-old infants consistently searched for a tall toy behind a tall as opposed to a short occluder. However, when the same toy was hidden inside a tall or a short container, only older, 7.5-month-old infants searched for the tall toy inside the tall container. These and control results (1) confirm previous violation-of-expectation (VOE) findings of a décalage in infants' reasoning about height information in occlusion and containment events; (2) cast doubt on the suggestion that VOE tasks overestimate infants' cognitive abilities; and (3) support recent proposals that infants use their physical knowledge to guide their actions when task demands do not overwhelm their limited processing resources.
Keywords: infants physical reasoning, occlusion, containment, action tasks
Recent investigations of infants' physical reasoning have revealed three main findings. First, infants form distinct event categories, such as occlusion, containment, and support events (e.g. Casasola, Cohen, & Chiarello, 2003; Hespos & Baillargeon, 2001a; McDonough, Choi, & Mandler, 2003). Second, for each event category, infants identify a series of variables that enables them to predict outcomes more and more accurately over time (e.g. Aguiar & Baillargeon, 2002; Baillargeon, Needham, & DeVos, 1992; Kotovsky & Baillargeon, 1998). Third, infants learn separately about each event category: variables identified in one category remain tied to that category—they are not generalized to other relevant categories (e.g. Hespos & Baillargeon, 2001a; Luo & Baillargeon, in preparation; Wang, Baillargeon, & Paterson, in press). The present research focused on this last finding.
The evidence that infants identify variables separately for each event category comes from experiments that compared infants' responses to the same variable in different event categories (e.g. Hespos & Baillargeon, 2001a; Luo & Baillargeon, in preparation; Wang et al., in press). One experiment, for example, compared 4.5-month-olds' ability to reason about the variable height in containment and in occlusion events (Hespos & Baillargeon, 2001a). The infants were assigned to a containment or an occlusion condition and saw two test events. In the containment condition, a hand grasped a knob at the top of a tall object; next to the object was a tall (tall event) or a short (short event) container. In both events, the hand lifted the object and lowered it inside the container until only the knob remained visible. The infants in the occlusion condition saw similar events except that the back half and bottom of each container were removed, leaving only the front half to serve as a rounded occluder.
The infants in the occlusion condition looked reliably longer at the short than at the tall event, but those in the containment condition tended to look equally at the two events. In subsequent experiments, 5.5-, 6.5-, and 7.5 month-olds were tested with the containment condition events; only the 7.5-month-olds detected the violation in the short event. These and control data thus revealed a marked décalage or lag in infants' identification of the variable height in occlusion and containment events (for an explanation of this lag, see Baillargeon, 2002; Hespos & Baillargeon, 2001a,b; Wang, Baillargeon, & Brueckner, 2004).
The discovery of décalages—often lasting several months—in infants' identification of the same variable in different event categories suggests that infants learn separately how each event category operates. One limitation of this evidence, however, is that it is entirely derived from violation-of-expectation (VOE) tasks. The present research asked whether infants would again show a décalage in their reasoning about height information in occlusion and containment events when tested with action tasks.
We reasoned that such converging evidence would not only confirm our previous results (Hespos & Baillargeon, 2001a), but would also bear on two broad issues. First, some investigators have expressed concerns that VOE tasks may overestimate infants' cognitive abilities (e.g. Bogartz, Shinskey, & Speaker, 1997; Haith & Benson, 1998; Thelen & Smith, 1994); finding, in this instance at least, that analogous results are obtained in VOE and in action tasks would help alleviate these concerns. Second, such evidence would be relevant to discussions of the conditions under which infants' physical knowledge successfully guides their actions (e.g. Berthier et al., 2001; Diamond & Lee, 2000; Spelke & Hespos, 2001); we return to this issue below.
1. The present research
In the present experiment, 6- and 7.5-month-olds were assigned to a containment or an occlusion condition (see Fig. 1). Each infant sat at a table facing an experimenter; a large screen stood on the table between them. The experimenter brought a tall frog from behind the screen, set it on the table, and encouraged the infant to inspect it. Next, the experimenter returned the frog behind the screen, and then removed the screen to reveal a platform on which stood a tall and a short container (containment condition) or a tall and a short occluder (occlusion condition); the occluders were identical to the containers without their back halves and bottoms. Two frog legs were visible at the bottom of each container or occluder. The experimenter slid the platform forward and encouraged the infant to find the frog.
Fig. 1.
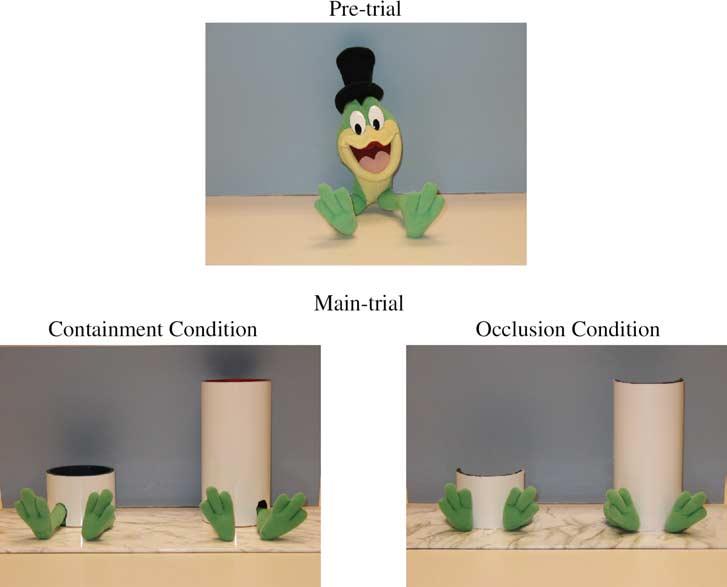
Stimuli used in the present research. Top: The tall, stuffed, toy frog had a green and yellow body, black and white eyes, a pink and red mouth, and a black top hat. A stiff wire in the frog's back enabled it to remain upright when seated. In this position, the frog was 21 cm tall and 9 cm wide and its legs were 23.5 cm long and 5 cm wide (at their largest points). At the start of each trial, the frog was placed on a table 115.5 cm wide and 125.5 cm deep, centered against a screen 30 cm high and 58 cm wide; the table and screen were covered with blue contact paper. Bottom: The tall and short containers used in the containment condition were made of PVC pipe 10 cm in diameter and had bottoms made of cardboard; they were covered with textured white contact paper and their top rims were painted black. The tall container was 23 cm tall and its interior was painted red; the short container was 8.5 cm tall and its interior was painted blue. Frog legs identical to those of the tall frog protruded from two small holes at the bottom of each container; these legs were attached to frogs that were cut at the waist (and not visible to the infant). The containers rested on a platform 0.5 cm high, 60 cm wide, 24 cm deep, and covered with white marbled contact paper. The containers were placed 7.5 cm on either side of the platform's midline, centered front to back. The tall and short occluders used in the occlusion condition were identical to the front halves of the tall and short containers, and they were placed in the same positions on the platform. Frog legs protruded from around the bottom left and right edges of each occluder; the legs wrapped around the occluder and the feet stuck out in front, as with the containers.
According to VOE findings, infants identify the variable height at about 3.5 months in occlusion events and at about 7.5 months in containment events (e.g. Baillargeon & DeVos, 1991; Baillargeon & Graber, 1987; Hespos & Baillargeon, 2001a). We reasoned that if the infants in the present experiment wanted to find the tall frog they had just seen, and brought to bear their physical knowledge—as revealed in VOE tasks—when searching for it, then: (1) in the occlusion condition, both the 6- and the 7.5-month-olds should realize that the tall frog could be hidden behind the tall but not the short occluder, and they should therefore search for it behind the tall occluder; and (2) in the containment condition, the 7.5-month-olds should similarly search for the tall frog inside the tall rather than the short container, but the 6-month-olds should perform at chance. Lacking the containment variable height, these younger infants should fail to appreciate that the tall frog could be hidden inside the tall but not the short container.
The preceding analysis presupposed that the infants' main objective in the present tasks would be that of retrieving the tall frog; such an objective would cause the infants who possessed and could bring to bear the appropriate physical knowledge to reach consistently for the tall container or occluder. However, it was of course possible for these infants to choose a different objective: they might want to explore the short container or occluder, to find out what manner of frog was hidden there (since it obviously could not be the tall one). Whether the infants reached consistently for the tall or the short container or occluder, we were aware that controls would be needed to rule out baseline preferences; these are discussed in Section 4.
2. Discrepancies between VOE and action results
How likely were the present action tasks to reveal the same physical knowledge as previous VOE tasks (e.g. Baillargeon & Graber, 1987; Hespos & Baillargeon, 2001a)? In investigations of infants' physical knowledge, VOE and action tasks have often yielded different results, with VOE tasks revealing more sophisticated expectations than action tasks. For example, infants give evidence in VOE tasks of distinguishing correct and incorrect search or support sequences, long before they succeed in action tasks at searching for a hidden object or at retrieving an object on the far end of a support (e.g. Baillargeon, 1993; Baillargeon, Graber, DeVos, & Black, 1990; Piaget, 1954).
Several accounts have been offered for the discrepancies between VOE and actions findings. For example, one account assumes that different systems of object representation guide infants' responses in VOE and in action tasks (e.g. Bertenthal, 1996; Spelke, Vishton, & von Hofsten, 1995). Another account suggests that weaker or less precise representations may be sufficient for success in VOE than in action tasks (e.g. Munakata, McClelland, Johnson, & Siegler, 1997; von Hofsten, Feng, & Spelke, 2000). According to a third, processing-load account (e.g. Berthier et al., 2001; Boudreau & Bushnell, 2000; Keen, Carrico, Sylvia, & Berthier, 2003), infants fail to reveal their physical knowledge in an action task when the total processing demands of the task overwhelm their limited resources; processing demands depend on both (1) the complexity of the actions involved and (2) the complexity of the physical reasoning involved.
The processing-load account can explain a wide array of findings in search, support, and other action tasks: for example, why infants are more likely to retrieve an object hidden behind a barrier when they can do so by reaching as opposed to crawling around the barrier (Lockman, 1984); why infants are more likely to search for an object hidden by turning off the room lights than for an object hidden under a cloth (Goubet & Clifton, 1998; Hood & Willatts, 1986); why infants are more likely to find an object hidden in one of two locations when searching visually than manually (Hofstadter & Reznick, 1996); why infants are more likely to remove a transparent than an opaque curtain or screen to retrieve an object behind it (Shinskey, Bogartz, & Poirier, 2000; Shinskey & Munakata, 2001); and why infants are more likely to retrieve an object on the far end of a support when they believe the object is attached to, rather than separate from, the support (Aguiar & Baillargeon, 2000). In each case, success is more likely when overall task demands are reduced, either because the actions are easier to plan and execute, or because the objects are easier to represent.
Berthier, Keen, and their colleagues also reported results consistent with their processing-load account (e.g. Berthier et al., 2001; Keen et al., 2003). In some experiments, for example, 8.5-month-olds watched a ball roll down a ramp and along a track that was partly hidden by a short screen. When a tall barrier stood behind the screen, blocking the ball's path, the infants showed appropriate disruptions in their anticipatory tracking: looks to the right of the screen were reliably delayed relative to no-barrier trials. However, infants no longer showed appropriate disruptions in their tracking when task demands were increased, either by (1) bringing the infants closer to the apparatus so that they could not only track but also attempt to catch the ball, or (2) using a short barrier that was fully hidden behind the screen.
In the present research, the infants performed relatively simple actions directed at a partly visible object (recall that frog legs protruded from each container or occluder). It thus seemed plausible that the infants would be able to use their physical knowledge to guide their actions.
3. Experiment
3.1. Method
3.1.1. Participants
Participants were 36 6-month-olds, 18 male and 18 female (range=5 months, 4 days to 6 months, 28 days, M=6 months, 5 days), and 32 7.5-month-olds, 17 male and 15 female (range=7 months, 2 days to 8 months, 21 days, M=7 months, 19 days). An additional 19 infants (11 6-month-olds and 8 7.5-month-olds) were tested but eliminated: 7 became fussy or inattentive, 5 grasped the two containers or occluders simultaneously on two or more trials, 4 refused to reach, and 3 stood and looked inside the containers or behind the occluders. Half of the infants in each age group were assigned to the containment condition, and half to the occlusion condition.
3.1.2. Procedure
Each infant sat on a parent's lap at the test table in a cut-out area 30 cm wide and 25 cm deep; the experimenter stood on the opposite side of the table. Parents were instructed to hold their infant at the hips and to remain silent and neutral during the trials.
Each infant received four trials, each consisting of a pre-trial and a main-trial. During the pre-trial, the screen stood centered on the table, 42 cm from and parallel to the top of the cut-out area. The experimenter brought the tall frog from behind the screen, set it on the table against the center of the screen, and encouraged the infant to play with it. After about 10 s (it sometimes took longer to pry the frog from the infant's hands), the experimenter returned the frog behind the screen. During the main-trial, the experimenter removed the screen (and the frog, surreptitiously) from the table, to reveal the tall and short containers or occluders standing on the platform. The experimenter slid the platform forward until it stood 42 cm from the cut-out area, out of the infant's reach. The experimenter then tapped the top of each container or occluder for 1 s, to draw the infant's attention to it. Next, the experimenter pushed the platform toward the infant, stopping just at the edge of the infant's reaching space, to encourage reaching with one hand instead of two and thus in effect force a choice. The infant was given up to 30 s to respond; during that time, the experimenter looked at the center of the platform to avoid inadvertently cueing the infant. As soon as the infant touched one of the frog legs or one of the containers or occluders, the experimenter cheered and pulled the platform out of reach (infants could not be allowed to see inside the containers or behind the occluders). The experimenter then returned the screen (and frog) to the table to begin the next trial. The positions of the tall and short containers or occluders were reversed across trials; the order in which these positions were presented, and the order in which the containers or occluders were tapped, were counterbalanced across infants.
Two video cameras recorded the infant's reaching behavior. One camera captured a side view of the infant, and the other camera was mounted on the ceiling to capture an aerial view; the images from both cameras were combined using a video mixer. Two independent coders analyzed copies of the tapes edited to include only main-trials (the reason for this manipulation will become clear later). On each trial, the coders determined whether the infant reached for the tall or short container or occluder. In this analysis, reaches to a container or occluder, or to the frog legs protruding from it, were treated as equivalent. Trials with discrepancies between the coders were viewed a second time and resolved through frame-by-frame analysis if necessary; this occurred on less than 2% of the trials.
Infants were rated as successful if they reached for the tall container or occluder on at least three of the four trials; this criterion required at least one cross-lateral reach.
Preliminary analyses of the data revealed no significant effects of sex, order of presentation, or order of tapping; the data were therefore collapsed across these factors in subsequent analyses.
4. Results
In the occlusion condition, 12/16 7.5-month-olds and 14/18 6-month-olds were successful (cumulative binomial probability, θ=.3125, P<.001 for each age group): they reached for the tall occluder on three or more of the four trials. In the containment condition, 12/16 7.5-month-olds (P<.001), but only 2/18 6-month-olds (P>.10), were successful. This difference was reliable, , P<.001, as was the difference between the responses of the 6-month-olds in the containment and occlusion conditions, , P<.001 (see Fig. 2 and Table 1).
Fig. 2.
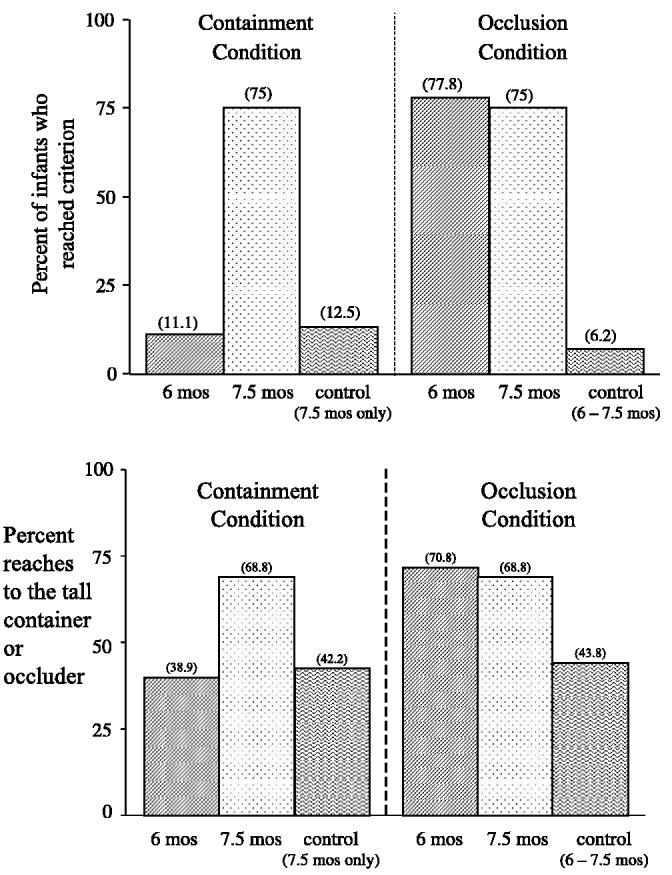
Top: Percentage of infants in each age group who reached for the tall container or occluder (or its frog legs) on at least three of the four trials. When infants touched the two containers or occluders in succession, only the one touched first was entered in the analyses; this occurred on 5% of the trials. When infants touched the two containers or occluders simultaneously on one trial, that trial was coded as incorrect; this occurred for 2/100 infants, one in the occlusion-control and one in the containment-control condition. Infants who touched the two containers or occluders simultaneously on two or more trials were eliminated and replaced (see Section 3.1.1). Bottom: Percentage of reaches to the tall container or occluder in each age group and condition.
Table 1.
Percentage of infants in each age group and condition with 0–4 reaches to the tall container/occluder across trials
| Container condition |
Occluder condition |
|||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 0/4 | 1/4 | 2/4 | 3/4 | 4/4 | 0/4 | 1/4 | 2/4 | 3/4 | 4/4 | |
| 6 months | 11.1 | 33.3 | 44.5 | 11.1 | 0 | 0 | 0 | 22.2 | 72.2 | 5.6 |
| 7.5 months | 0 | 6.2 | 18.8 | 68.8 | 6.2 | 0 | 12.5 | 12.5 | 62.5 | 12.5 |
| Control Condition | 6.2 | 31.3 | 50.0 | 12.5 | 0 | 6.2 | 18.8 | 68.8 | 6.2 | 0 |
Of the 16/18 unsuccessful 6-month-olds in the containment condition, 8 reached for the short container on three or more trials (P>.10), and 8 reached for the short container on two trials and the tall container on two trials. There was thus no systematic bias in the infants' responses.
4.1. Occlusion-control condition
Most of the 7.5- and 6-month-olds in the occlusion condition (26/34 infants) were successful, suggesting that they realized that the tall frog could be hidden behind the tall but not the short occluder. However, another interpretation was that the infants simply preferred the tall occluder. To examine this alternative interpretation, we ran a control condition identical to the occlusion condition except that the infants never saw the tall frog: there were no pre-trials, only main-trials. Participants were 16 infants, 9 6-month-olds and 7 7.5-month-olds (overall range=5 months, 13 days to 8 months, 6 days, M=6 months, 25 days); one additional infant refused to reach and was eliminated. Videotapes were coded as before; because they were edited to include no pre-trials, coders could not determine whether the infants belonged to the occlusion or the occlusion-control condition. Only 1/16 infants in the occlusion-control condition (a 6-month-old) reached for the tall occluder on three or more trials (P>.10). This result differed reliably from that obtained in the occlusion condition, , P<.001.
No systematic bias was found in the responses of the 15/16 unsuccessful infants in the occlusion-control condition: 4 reached for the short occluder on three or more trials (P>.10), and 11 reached for the short occluder on two trials and the tall occluder on two trials.
4.2. Containment-control condition
Most of the 7.5-month-olds in the containment condition (12/16) were successful, suggesting that they realized that the tall frog could be hidden inside the tall but not the short container. To confirm that the infants did not simply prefer the tall container, we ran a control condition identical to the containment condition, except that, as in the occlusion-control condition, the infants never saw the tall frog. Participants were 16 7.5-month-olds (range=7 months, 3 days to 8 months, 23 days, M=7 months, 22 days); one additional infant reached for both containers on two trials and was eliminated. Only 2/16 infants in this containment-control condition reached for the tall container on three or more trials (P>.10); this performance was reliably different from that of the 7.5-month-olds in the containment condition, , P<.001.
Of the 14/16 unsuccessful infants in the containment-control condition, 6 reached for the short container on three or more trials (P>.10), and 8 reached for the short container on two trials and the tall container on two trials; there was thus no systematic bias in their responses.
5. Discussion
VOE tasks have uncovered a décalage in infants' reasoning about the variable height in occlusion and containment events (e.g. Baillargeon & DeVos, 1991; Hespos & Baillargeon, 2001a): although infants as young as 3.5 months are surprised when a tall object becomes hidden behind a short occluder, it is not until infants are about 7.5 months that they are surprised when a tall object becomes hidden inside a short container. The present action tasks yielded results consistent with this décalage: although 6- and 7.5-month-olds searched for a tall frog behind a tall as opposed to a short occluder, only 7.5-month-olds searched for the tall frog inside a tall as opposed to a short container.
The present research thus provides converging evidence that infants form distinct event categories and learn separately about each category: variables identified in one category are not generalized to other categories, even when equally relevant (e.g. Baillargeon, 2002; Baillargeon & Wang, 2002). Breaking down the task of learning into smaller components is a time-honored solution to the difficulties of knowledge acquisition; hence, it is not surprising that infants' physical-reasoning system should be designed to acquire event-specific expectations rather than event-general principles.
The present results also support the proposal that infants reveal their physical knowledge in action tasks when their limited processing resources are not overly taxed by the joint demands of (1) planning and executing the necessary actions and (2) performing the necessary physical reasoning (e.g. Berthier et al., 2001; Keen et al., 2003). In the present research, task demands were fairly minimal, and the infants revealed the same physical knowledge as in prior VOE tasks. In recent experiments using similar action tasks, we explored the development of infants' knowledge about support events, and again confirmed prior VOE results (Hespos & Baillargeon, in preparation).
In sum, using action tasks, we replicated recent findings from VOE tasks that infants identify the variable height first in occlusion and only after some time in containment events. This replication provides converging evidence that infants form event categories and learn separately about each category; it gives a clear indication that VOE tasks can yield fair and accurate estimates of infants' cognitive abilities; and it supports recent proposals that infants use their physical knowledge to guide their actions when task demands do not overwhelm their limited processing resources.
Acknowledgements
This research was supported by grants from the National Institute of Child Health and Human Development to the first (HD-08124) and second (HD-21104) author. We thank Cindy Fisher for helpful suggestions; Rebecca Bloch and Laura Glaser for their help with the data collection and coding; and the parents who kindly agreed to have their infants participate in the research.
References
- Aguiar A, Baillargeon R. Perseveration and problem solving in infancy. In: Reese HW, editor. Advances in child development and behavior. Vol. 27. Academic Press; San Diego, CA: 2000. pp. 135–180. [DOI] [PubMed] [Google Scholar]
- Aguiar A, Baillargeon R. Developments in young infants' reasoning about occluded objects. Cognitive Psychology. 2002;45:267–336. doi: 10.1016/s0010-0285(02)00005-1. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Baillargeon R. The object concept revisited: New directions in the investigation of infants' physical knowledge. In: Granrud CE, editor. Visual perception and cognition in infacncy. Erlbaum; Hillsdale, NJ: 1993. pp. 265–315. [Google Scholar]
- Baillargeon R. The acquisition of physical knowledge in infancy: A summary in eight lessons. In: Goswami U, editor. Blackwell handbook of childhood cognitive development. Blackwell; Oxford: 2002. pp. 46–83. [Google Scholar]
- Baillargeon R, DeVos J. Object permanence in 3.5- and 4.5-month-old infants: Further evidence. Child Development. 1991;62:1227–1246. [PubMed] [Google Scholar]
- Baillargeon R, Graber M. Where's the rabbit? 5.5-month-old infants' representation of the height of a hidden object. Cognitive Development. 1987;2:375–392. [Google Scholar]
- Baillargeon R, Graber M, DeVos J, Black J. Why do young infants fail to search for hidden objects? Cognition. 1990;36:225–284. doi: 10.1016/0010-0277(90)90059-s. [DOI] [PubMed] [Google Scholar]
- Baillargeon R, Needham A, DeVos J. The development of young infants' intuitions about support. Early Development and Parenting. 1992;1:69–78. [Google Scholar]
- Baillargeon R, Wang S. Event categorization in infancy. Trends in Cognitive Sciences. 2002;6:85–93. doi: 10.1016/s1364-6613(00)01836-2. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Bertenthal BI. Origins and early development of perception, action representation. Annual Review of Psychology. 1996;47:431–459. doi: 10.1146/annurev.psych.47.1.431. [DOI] [PubMed] [Google Scholar]
- Berthier NE, Bertenthal BI, Seaks JD, Sylvia MR, Johnson RL, Clifton RK. Using object knowledge in visual tracking and reaching. Infancy. 2001;2:257–284. [Google Scholar]
- Bogartz RS, Shinskey JL, Speaker CJ. Interpreting infant looking: The event set×event set design. Developmental Psychology. 1997;33:408–422. doi: 10.1037//0012-1649.33.3.408. [DOI] [PubMed] [Google Scholar]
- Boudreau JP, Bushnell EW. Spilling thoughts: Configuring attentional resources in infants' goal-directed actions. Infant Behavior and Development. 2000;23:543–566. [Google Scholar]
- Casasola M, Cohen LB, Chiarello E. Six-month-old infants' categorization of containment spatial relations. Child Development. 2003;74:679–693. doi: 10.1111/1467-8624.00562. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Diamond A, Lee E. Inability of 5-month-old infants to retrieve a contiguous object: A failure of conceptual understanding or of control of action? Child Development. 2000;71:1477–1494. doi: 10.1111/1467-8624.00241. [DOI] [PubMed] [Google Scholar]
- Goubet N, Clifton RK. Object and event representation in 6.5-month-old infants. Developmental Psychology. 1998;34:63–76. doi: 10.1037/0012-1649.34.1.63. [DOI] [PubMed] [Google Scholar]
- Haith MM, Benson JB, Kuhn D, Siegler R. Infant cognition. In: Damon W, editor. Handbook of child psychology. Vol. 2. Wiley; New York, NY: 1998. pp. 199–254. [Google Scholar]
- Hespos SJ, Baillargeon R. Infants' knowledge about occlusion and containment events: A surprising discrepancy. Psychological Science. 2001a;12:141–147. doi: 10.1111/1467-9280.00324. [DOI] [PubMed] [Google Scholar]
- Hespos SJ, Baillargeon R. Knowledge about containment events in very young infants. Cognition. 2001b;78:204–245. doi: 10.1016/s0010-0277(00)00118-9. [DOI] [PubMed] [Google Scholar]
- Hespos SJ, Baillargeon R. “Which toy can I get?”: Converging evidence from action tasks for violation-of-expectation findings. (in preparation) [Google Scholar]
- Hofstadter M, Reznick JS. Response modality affects human infant delayed-response performance. Child Development. 1996;67:646–658. [PubMed] [Google Scholar]
- Hood B, Willatts P. Reaching in the dark to an object's remembered position: Evidence of object permanence in 5-month-old infants. British Journal of Developmental Psychology. 1986;4:57–65. [Google Scholar]
- Keen R, Carrico RL, Sylvia MR, Berthier NE. How infants use perceptual information to guide action. Developmental Science. 2003;6:221–231. [Google Scholar]
- Kotovsky L, Baillargeon R. The development of calibration-based reasoning about collision events in young infants. Cognition. 1998;67:311–351. doi: 10.1016/s0010-0277(98)00036-5. [DOI] [PubMed] [Google Scholar]
- Lockman JJ. The development of detour ability during infancy. Child Development. 1984;55:482–491. [PubMed] [Google Scholar]
- Luo Y, Baillargeon R. Infants' reasoning about transparent occluders and containers. (in preparation) [Google Scholar]
- McDonough L, Choi S, Mandler JM. Understanding spatial relations: Flexible infants, lexical adults. Cognitive Psychology. 2003;46:229–259. doi: 10.1016/s0010-0285(02)00514-5. [DOI] [PubMed] [Google Scholar]
- Munakata Y, McClelland JL, Johnson MH, Siegler R. Rethinking infant knowledge: Toward an adaptive process account of successes and failures in object permanence tasks. Psychological Review. 1997;104:686–713. doi: 10.1037/0033-295x.104.4.686. [DOI] [PubMed] [Google Scholar]
- Piaget J. The construction of reality in the child. Basic Books; New York, NY: 1954. [Google Scholar]
- Shinskey JL, Bogartz RS, Poirier CR. The effects of graded occlusion on manual search and visual attention in 5- to 8-month-old infants. Infancy. 2000;1:323–346. doi: 10.1207/S15327078IN0103_3. [DOI] [PubMed] [Google Scholar]
- Shinskey JL, Munakata Y. Detecting transparent barriers: Clear evidence against the means-end deficit account of search failures. Infancy. 2001;2:395–404. doi: 10.1207/S15327078IN0203_7. [DOI] [PubMed] [Google Scholar]
- Spelke ES, Hespos S. Continuity, competence the object concept. In: Dupoux E, editor. Language, brain cognitive development: Essays in honor of Jacques Mehler. MIT Press; Cambridge, MA: 2001. pp. 325–340. [Google Scholar]
- Spelke ES, Vishton P, von Hofsten C. Object perception, object-directed action physical knowledge in infancy. In: Gazzaniga MS, editor. The cognitive neurosciences. MIT Press; Cambridge, MA: 1995. pp. 165–180. [Google Scholar]
- Thelen E, Smith LB. A dynamic systems approach to the development of cognition and action. MIT Press; Cambridge, MA: 1994. [Google Scholar]
- von Hofsten C, Feng Q, Spelke ES. Object representation and predictive action in infancy. Developmental Science. 2000;3:193–205. [Google Scholar]
- Wang S, Baillargeon R, Brueckner L. Young infants' reasoning about hidden objects: Evidence from violation-of-expectation tasks with test trials only. Cognition. 2005;95:129–173. doi: 10.1016/j.cognition.2003.09.012. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Wang S, Baillargeon R, Paterson S. Detecting continuity violations in infancy: A new account and new evidence from covering and tube events. Cognition. doi: 10.1016/j.cognition.2002.11.001. in press. [DOI] [PMC free article] [PubMed] [Google Scholar]