

Abstract
Surfaces that locally minimize area have been extensively used to model physical phenomena, including soap films, black holes, compound polymers, protein folding, etc. The mathematical field dates to the 1740s but has recently become an area of intense mathematical and scientific study, specifically in the areas of molecular engineering, materials science, and nanotechnology because of their many anticipated applications. In this work, we show that all minimal surfaces are built out of pieces of the surfaces in Figs. 1 and 2.
Minimal surfaces with uniform curvature or area bounds are well understood, and the regularity theory is complete, yet essentially nothing was known without such bounds. We discuss here the theory of embedded (i.e., without self-intersections) minimal surfaces in Euclidean space R3 without a priori bounds. The study is divided into three cases, depending on the topology of the surface. In case 1, the surface is a disk; in case 2, the surface is a planar domain (genus zero); and case 3 is that of finite (nonzero) genus. The complete understanding of the disk case is applied in both cases 2 and 3. In all three cases, the surface is allowed to have a boundary. This point is essential and makes the results particularly useful. For instance, given any minimal surface, independent of its topology, if a component of the intersection of the surface with a Euclidean ball is a disk, then case 1 applies and gives a good description of that component, and similarly, for cases 2 and 3. The surface itself may then be thought of as built out of these snapshots (or building blocks).
Summary
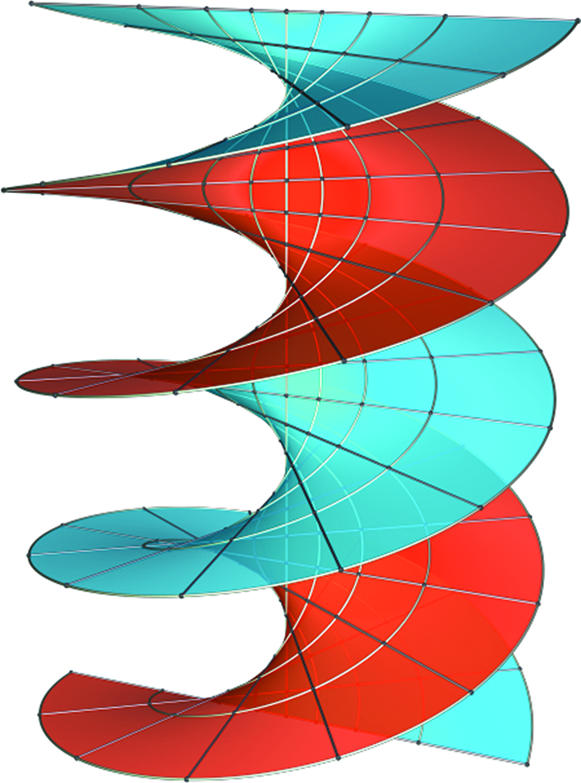
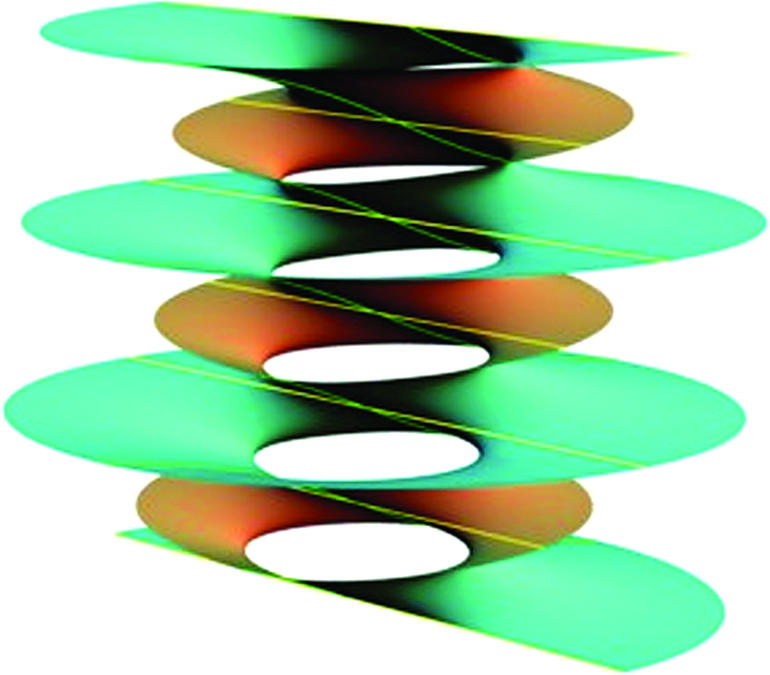
The helicoid, which is a “double spiral staircase,” was discovered to be a minimal surface by Meusnier in 1776 (see Fig. 1). As we will show, the helicoid is the most important example of an embedded minimal disk. In fact, we will see that every such disk is either a graph of a function or part of a double spiral staircase.
Fig. 1.
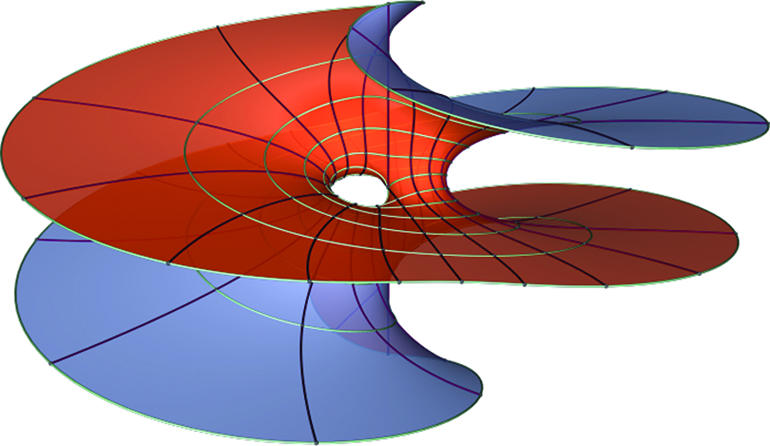
For planar domains, the fundamental examples are the catenoid (see Fig. 2), also discovered by Meusnier in 1776, and the Riemann examples discovered by Riemann in the early 1860se (see Figs. 3–6). Finally, for general fixed genus, an important example is the recent example by Weber et al. (1, 2) of a genus-one helicoid (see Fig. 7). The genus-one helicoid is a complete minimal surface that on a large scale, away from the genus, looks essentially like an ordinary helicoid. This example illustrates that the helicoid is one of the basic building blocks of general minimal surfaces. This property is also true for the Riemann examples. The Riemann examples are a two-parameter family of complete minimal surfaces. As the parameters degenerate, the Riemann examples look like either a collection of catenoids stacked on top of each other or two oppositely oriented helicoids (with parallel axes) glued together.
Fig. 2.
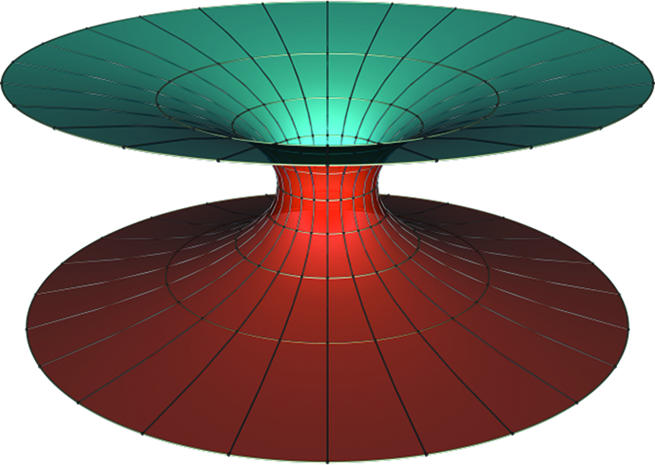
Fig. 3.

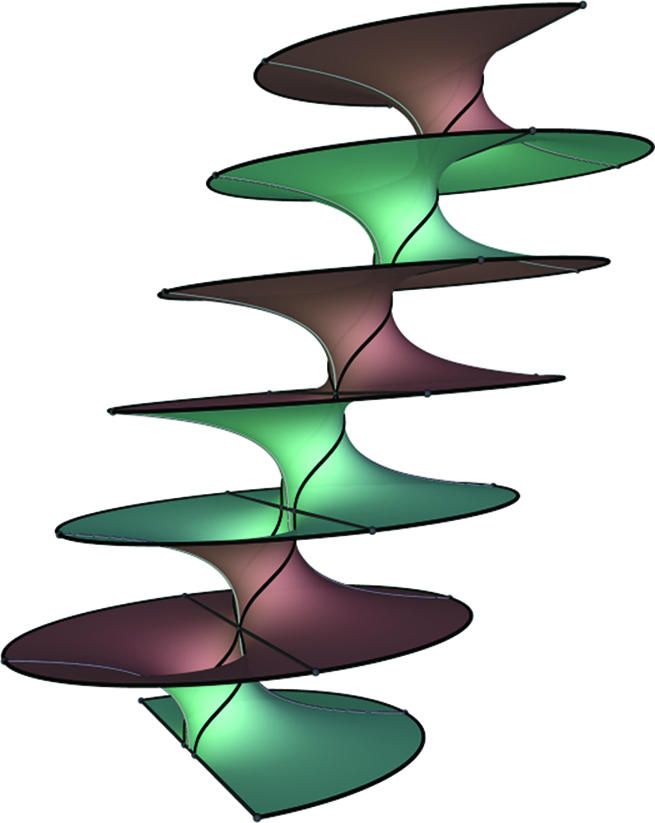
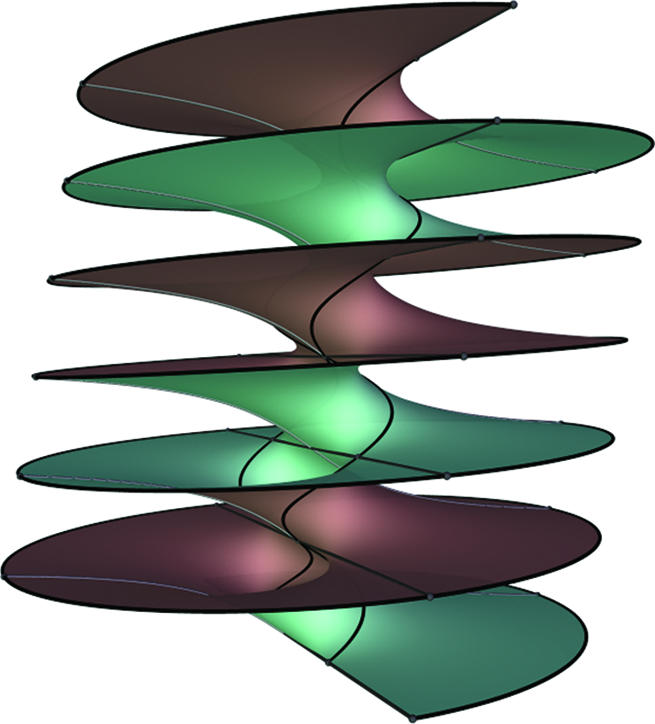
The Riemann examples are a two-parameter family of periodic complete minimal surfaces, where the parameters can be thought of as the size of the necks and the angle from one fundamental domain to the next. By choosing the two parameters appropriately, one can produce sequences of Riemann examples that illustrate both structure theorems. As the parameters degenerate, the Riemann examples look like either a collection of catenoids stacked on top of each other or two oppositely oriented helicoids (with parallel axes) glued together. Figs. 3–6 show various stages of degeneration. The first two (Figs. 3 and 4) are where the necks are far apart and the surface looks like a collection of catenoids stacked on top of each other; in Fig. 5, the necks have moved closer to each other, and in Fig. 6, the necks are almost on top of each other, and the surface looks like two oppositely oriented helicoids glued together.
Fig. 4.
See Fig. 3 legend for details.
Fig. 5.
See Fig. 3 legend for details.
Fig. 6.
See Fig. 3 legend for details.
Fig. 7.
The genus-one helicoid is a (complete and embedded) minimal surface of genus one that is asymptotic to the helicoid.
In the last section, we discuss why (complete) embedded minimal surfaces are automatically proper (i.e., why divergent sequences of points on the surface diverge in Euclidean space). This question was previously known as the Calabi–Yau conjectures for embedded surfaces. For immersed surfaces, there are counterexamples by Jorge and Xavier (3) and Nadirashvili (4).
What Are the Possible Shapes of Natural Objects in Equilibrium and Why?
When a closed wire or a frame is dipped into a soap solution and afterward raised up from the solution, the surface spanning the wire is a soap film. The soap film is in a state of equilibrium. What are the possible shapes of soap films and why? Or why is DNA like a double spiral staircase? “What” and “why” are fundamental questions that, when answered, help us understand the world we live in. The answer to any question about the shape of natural objects is bound to involve mathematics.
Soap films, soap bubbles, and surface tension were extensively studied by the Belgian physicist and inventor (of the stroboscope) Plateau in the first half of the 19th century. At least since then, it has been known that the right mathematical model for a soap film is a minimal surface:f the soap film is in a state of minimum energy when it covers the least possible amount of area. There are several other fields where minimal surfaces are actively used in understanding the shapes of physical phenomena. Even if one restricts the discussion to the helicoid, minimal surfaces come up in the study of compound polymers (dislocations), protein folding, etc.
We discuss here the answer to the following questions: What are the possible shapes of embedded minimal surfaces in R3, and why?
Critical Points, Minimal Surfaces.
Let Σ ⊂ R3 be a smooth orientable surface (possibly with a boundary) with unit normal nΣ. Given a function φ in the space C0∞(Σ) of infinitely differentiable (i.e., smooth), compactly supported functions on Σ, consider the one-parameter variation of surfaces
The so-called first variation formula of area is the equation (integration is with respect to the area of Σ)
 |
where H is the mean curvature of Σ, and the mean curvature is the sum of the principal curvatures κ1, κ2. [When Σ is noncompact, Σt,φ in Eq. 2 is replaced by Γt,φ, where Γ is any compact set containing the support of φ.] The surface Σ is said to be a “minimal” surface (or just minimal) if Eq 2 is zero for all ø, or, equivalently by Eq. 2, if the mean curvature H is identically zero. Thus, Σ is minimal if and only if it is a critical point for the area functional. Moreover, when Σ is minimal, κ1 = −κ2 (since H = κ1 + κ2 = 0), and the Gaussian curvature KΣ = κ1κ2 is nonpositive.
Minimizers and Stable Minimal Surfaces.
Because a critical point is not necessarily a minimum, the term minimal is misleading, but it is time-honored. The equation for a critical point is also sometimes called the Euler–Lagrange equation. A computation shows that if Σ is minimal, then
 |
Here, LΣφ = ΔΣφ + |A|2φ is the second variational (or Jacobi) operator, ΔΣ is the Laplacian on Σ, and A is the second fundamental form of Σ. So A is the covariant derivative of the unit normal of Σ, and |A|2 = κ12 + κ22 = −2κ1κ2 = −2KΣ, where κ1, κ2 are the principal curvatures (recall that because Σ is minimal, κ1 = −κ2). A minimal surface Σ is said to be stable if
One can show that a minimal graph is stable, and, more generally, so is a multivalued minimal graph (see below for the precise definition). Throughout, let x1, x2, x3 be the standard coordinates on R3. For y ∈ Σ ⊂ R3 and s > 0, the extrinsic balls are Bs(y) = {x ∈ R3‖x − y| < s}.
Embedded = Without Self-Intersections.
Our surfaces will all be without self-intersections, i.e., they will be embedded. By an embedding, we mean a smooth injective immersion from an abstract surface into R3.
Topology of Surfaces.
The classification of minimal surfaces will essentially only depend on the topology of the surface and on whether or not the surface has a point where the curvature is large.
Compact orientable surfaces without boundaries are classified by their genus, a nonnegative integer. Genus = 0 corresponds to a sphere, genus = 1 to the torus, a model of which is the surface of an object formed by attaching a “suitcase handle” to a sphere. A surface of genus = k is modeled by the surface of a sphere to which k-handles have been attached. A compact orientable surface with a boundary is one formed by taking one of these surfaces and removing a number of disjoint disks. The genus of the surface with a boundary is the genus of the original object, and the boundary corresponds to the edges of the surface created by disk removal. In particular, a surface with genus 0 and nonempty boundary is a planar domain, i.e., it can be obtained from the disk in the plane by removing a number of disjoint subdisks. Such a surface is because it can be obtained from the sphere by removing a number of disks, and after removing the first disk from the sphere, we have a disk in a plane. Sometimes we will talk about surfaces that are simply connected, i.e., every loop on the surface can be shrunk (without leaving the surface) to a point curve. One can easily see that the only simply connected surfaces are the disk and the sphere.
Disks
Study of the shapes of natural objects in equilibrium, really surfaces in equilibrium, goes back a long, long way. There are questions of existence of solutions, uniqueness of equilibria, and the global structure of the space (or spaces) of examples. At the intersection of all of these questions is the question of what the (shape of the) natural building blocks are. In a broad sense, we will see that graphs and helicoids are in a fundamental way the key building blocks of embedded minimal surfaces.
There are two local models for embedded minimal “disks.” One model is the plane (or, more generally, a minimal graph), and the other is a piece of a helicoid.
Minimal Graphs and the Helicoid.
The derivation of the equation for a minimal graph goes back to Lagrange’s 1762 memoir. [Note that if Ω is a simply connected domain in R2 and u is a real valued function, the graph of u, i.e., the set {(x1, x2, u(x1, x2))|(x1, x2) ∈ Ω}, is a disk.] Minimal graphs over proper simply connected domains in R2 give a large class of embedded minimal disks, although by a classical theorem of Bernstein (5) from 1916, entire (i.e., where Ω = R2) minimal graphs are planes.
The second model comes from the helicoid, which was discovered by Meusnier in 1776.g The helicoid is a “double spiral staircase” given by sweeping out a horizontal line rotating at a constant rate as it moves up a vertical axis at a constant rate (see Fig. 1). Each half-line traces out a spiral staircase, and together the two half-lines trace out (up to scaling) the double spiral staircase.
Anyone who has climbed a spiral staircase knows that the stairs become steep in the center. The tangent plane to the helicoid at a point on the vertical axis is a vertical plane; thus, the helicoid is not a graph over the horizontal plane. In fact, as we saw earlier, any minimal surface has nonpositive curvature; for the helicoid the curvature is most negative along the axis and converges asymptotically to zero as one moves away from the axis. This decay corresponds to the fact that as one moves away from the axis, larger and larger pieces of the helicoid are graphs.
For the results on embedded minimal disks (see Structure of Embedded Minimal Disks), it is important to understand a sequence of helicoids obtained from a single helicoid by rescaling as follows.
Consider the sequence Σi = aiΣ of rescaled helicoids where ai → 0. (That is, rescale R3 by ai, so points that used to be distance d apart will in the rescaled R3 be distance aid apart.) The curvatures of this sequence of rescaled helicoids are blowing up (i.e., the curvatures go to infinity) along the vertical axis. The sequence converges (away from the vertical axis) to a foliation by flat parallel planes; that is, it converges to the collection of planes x3 = constant. The singular set (the axis) then consists of removable singularities.
Multivalued Graphs, Spiral Staircases, and Double Spiral Staircases.
To be able to give a precise meaning to the statement that the helicoid is a double spiral staircase, we will need the notion of a multivalued graph; each staircase will be a multivalued graph. Intuitively, a multivalued graph is a surface covering an annulus, such that over a neighborhood of each point of the annulus, the surface consists of N graphs. To make this notion precise, let Dr be the disk in the plane centered at the origin and of radius r, and let 𝒫 be the universal cover of the punctured plane C\{0} with global polar coordinates (ρ, θ) so ρ > 0, and θ ∈ R. An “N-valued graph” on the annulus Ds\Dr is a single-valued graph of a function u over {(ρ, θ)|r < ρ ≤ s, |θ| ≤ Nπ}. For working purposes, we generally think of the intuitive picture of a multisheeted surface in R3, and we identify the single-valued graph over the universal cover with its multivalued image in R3.
The multivalued graphs that we will consider will all be embedded, which corresponds to a nonvanishing separation between the sheets (or the floors). If Σ is the helicoid, then Σ\{x3 − axis} = Σ1 ∪ Σ2, where Σ1, Σ2 are ∞-valued graphs on C\{0}. Σ1 is the graph of the function u1(ρ, θ) = θ, and Σ2 is the graph of the function u2(ρ, θ) = θ + π. (Σ1 is the subset where s > 0 in Eq. 6 and Σ2 the subset where s < 0.) In either case, the separation between the sheets is constant, equal to 2π. A “multivalued minimal graph” is a multivalued graph of a function u satisfying the minimal surface equation.
Structure of Embedded Minimal Disks.
All of our results, for disks as well as for other topological types, require only a piece of a minimal surface. In particular, the surfaces may well have boundaries, and when we, for instance, say in the next theorem, “Any embedded minimal disk in R3 is either a graph of a function or part of a double spiral staircase,” then we mean that if the surface is contained in a Euclidean ball of radius r0 and the boundary is contained in the boundary of that ball, then in a concentric Euclidean ball with radius a fixed (small) fraction of r0, any component of the surface is either a graph of a function or part of a double spiral staircase. That the surfaces are allowed to have boundaries is a major point and makes the results particularly useful. Note also that because the conclusion is for a “fixed fraction of the surface,” this theorem is an interior estimate.
The following is the main structure theorem for embedded minimal disks.h
Theorem 1.
Any embedded minimal disk in R3 is either a graph of a function or part of a double spiral staircase. In particular, if for some point the curvature is sufficiently large, then the surface is part of a double spiral staircase (it can be approximated by a piece of a rescaled helicoid). On the other hand, if the curvature is below a certain threshold everywhere, then the surface is a graph of a function.
As a consequence of this structure theorem we get the following compactness result.
Corollary 1.
A sequence of embedded minimal disks with curvatures blowing up (i.e., going to infinityi) at a point mimics the behavior of a sequence of rescaled helicoids with curvature going to infinity (see the discussion of rescaled helicoids at the end of Minimal Graphs and the Helicoid).
A Consequence for Sequences that Are Uniformly Locally Simply Connected (ULSC).
Sequences of planar domains that are not simply connected are, after passing to a subsequence, naturally divided into two separate cases depending on whether or not the topology is concentrating at points. To distinguish between these cases, we will say that a sequence of surfaces Σi2 ⊂ R3 is ULSC if for each x ∈ R3, there exists a constant r0 > 0 (depending on x), so that for all r ≤ r0, and every surface Σi
For instance, a sequence of rescaled helicoids is ULSC, whereas a sequence of rescaled catenoids where the necks shrink to zero is not. The catenoid that plays an important role in the next section is the minimal surface in R3 given by rotating the curve s → (cosh s, s) around the x3-axis (see Fig 2).
Applying the above structure theorem for disks to ULSC sequences gives that there are only two local models for such surfaces. That is, locally in a ball in R3, one of following holds.
The curvatures are bounded, and the surfaces are locally graphs over a plane.
The curvatures blow up, and the surfaces are locally double spiral staircases.
Both of these cases are illustrated by taking a sequence of rescalings of the helicoid; the first case occurs away from the axis, whereas the second case occurs on the axis. If we take a sequence Σi = aiΣ of rescaled helicoids where ai → 0, then the curvature blows up along the vertical axis but is bounded away from this axis. Thus, we get the following:
The intersection of the rescaled helicoids with a ball away from the vertical axis gives a collection of graphs over the plane {x3 = 0}.
The intersection of the rescaled helicoids with a ball centered on the vertical axis gives a double spiral staircase.
Two Key Ideas Behind the Proof of the Structure Theorem for Disks.
The first of these key ideas says that if the curvature of such a disk Σ is large at some point x ∈ Σ, then near x a multivalued graph forms (in Σ), and it extends (in Σ) almost all of the way to the boundaryj of Σ. Moreover, the inner radius, rx, of the annulus where the multivalued graph is defined is inversely proportional to |A|(x), and the initial separation between the sheets is bounded by a constant times the inner radius.
An important ingredient in the proof of Theorem 1 is that general embedded minimal disks with large curvature at some interior point can be built out of N-valued graphs. In other words, any embedded minimal disk can be divided into pieces, each of which is an N-valued graph. Thus, the disk itself should be thought of as being obtained by stacking these pieces (graphs) on top of each other.k
The second key result (Theorem 2) is a curvature estimate for embedded minimal disks in a half-space. As a corollary (Corollary 2 below) of this theorem, we get that the set of points in an embedded minimal disk where the curvature is large lies within a cone, and thus the multivalued graphs, whose existence were discussed above, will all start off within this cone.
The curvature estimate for disks in a half-space is the following (in this theorem r0 is a scaling factor, which after rescaling can be taken to be one).
Theorem 2.
There exists ε > 0 such that for all r0 > 0, if Σ ⊂ B2r0 ∩ {x3 > 0} ⊂ R3 is an embedded minimal disk with ∂Σ ⊂ ∂B2r0, then for all components Σ′ of Br0 ∩ Σ that intersect Bεr0
This theorem has an equivalent formulation that may be easier to appreciate. Namely, for ε > 0 sufficiently small, Eq. 8 is equivalent to the statement that Σ′ is a graph over (a domain in) the plane {x3 = 0}.
Theorem 2 is an interior estimate where the curvature bound (Eq. 8) is on the ball Br0 of one-half the radius of the ball B2r0 containing Σ. This interior estimate is just like a gradient estimate for a harmonic function where the gradient bound is on one-half of the ball where the function is defined.
We will often refer to Theorem 2 as “the one-sided curvature estimate” (because Σ is assumed to lie on one side of a plane). Note that the assumption in Theorem 2 that Σ is simply connected (i.e., that Σ is a disk) is crucial, as can be seen from the example of a rescaled catenoid. Rescaled catenoids converge (with multiplicity two) to the flat plane. Likewise, by considering the universal cover of the catenoid, one sees that Theorem 2 requires the disk to be embedded and not just immersed.
In the proof of Theorem 1, the following (direct) consequence of Theorem 2 (with the 2-valued graph playing the role of the plane {x3 = 0}) is needed.
Corollary 2.
If an embedded minimal disk contains a 2-valued graph over an annulus in a plane, then away from a cone with axis orthogonal to the 2-valued graph the disk consists of multivalued graphs over annuli in the same plane.
By definition, if δ > 0, then the (convex) cone with vertex at the origin, cone angle (π/2 − arctan δ), and axis parallel to the x3-axis is the set
Uniqueness Theorems.
Using the above structure theorem for disks, Meeks and Rosenberg (10) proved that the plane and the helicoid are the only complete properly embedded simply connected minimal surfaces in R3 (the assumption of properness can in fact be removed by ref. 11; see Embedded Minimal Surfaces Are Automatically Proper). Catalan had proved in 1842 that any complete ruled minimal surface is either a plane or a helicoid. A surface is said to be “ruled” if it has the parameterization
and β and δ are curves in R3. The curve β(t) is called the “directrix” of the surface, and a line having δ(t) as direction vector is called a “ruling.” For the helicoid in Eq. 5, the x3-axis is a directrix, and for each fixed t the line s → (s cos t, s sin t, t) is a ruling.
For cylinders, there is a corresponding uniqueness theorem. Namely, combining refs. 12, 13 (see also ref. 14), and 11, one has that any complete embedded minimal cylinder in R3 is a catenoid.
Conjecturally similar uniqueness theorems should hold for other planar domains and surfaces of fixed (nonzero) genus (1, 15).
Planar Domains
We describe next two main structure theorems for “nonsimply connected” embedded minimal planar domains. (Precise statements of these results and their proofs are in ref. 16.)
The first of these asserts that any such surface without small necksl can be obtained by gluing together two oppositely oriented double spiral staircases. Note that when one glues two oppositely oriented double spiral staircases together, then one remains at the same level if one circles both axes.
The second gives a “pair of pants” decomposition of any such surface when there are small necks, cutting the surface along a collection of short curves. After the cutting, we are left with graphical pieces that are defined over a disk with either one or two subdisks removed (a topological disk with two subdisks removed is called a pair of pants).
Both structures occur as different extremes in the two-parameter family of minimal surfaces known as Riemann examples.
The Catenoid and the Riemann Examples.
When the sequence is no longer ULSC, then there are other local models for the surfaces. The simplest example is a sequence of rescaled catenoids.
A sequence of rescaled catenoids converges with multiplicity two to the flat plane. The convergence is in the C∞ topology except at 0, where |A|2 → ∞. This sequence of rescaled catenoids is not ULSC because the simple closed geodesic on the catenoid, i.e., the unit circle in the {x3 = 0} plane, is noncontractible, and the rescalings shrink it down to the origin.
One can get other types of curvature blow-up by considering the family of embedded minimal planar domains known as the Riemann examples (see Figs. 3–6). Modulo translations and rotations, this family is a two-parameter family of periodic minimal surfaces, where the parameters can be thought of as the size of the necks and the angle from one fundamental domain to the next. By choosing the two parameters appropriately, one can produce sequences of Riemann examples that illustrate both structure theorems:
If we take a sequence of Riemann examples where the neck size is fixed and the angles go to π/2, then the surfaces with angle near π/2 can be obtained by gluing together two oppositely oriented double spiral staircases (Fig. 6). Each double spiral staircase looks like a helicoid. This sequence of Riemann examples converges to a foliation by parallel planes. The convergence is smooth away from the axes of the two helicoids (these two axes are the singular set where the curvature blows up). The sequence is ULSC because the size of the necks is fixed and thus illustrates the first structure theorem (Corollary 3).
If we take a sequence of examples where the neck sizes go to zero, then we get a sequence that is not ULSC. However, the surfaces can be cut along short curves into collections of graphical pairs of pants (see Fig. 3). The short curves converge to points, and the graphical pieces converge to flat planes except at these points, illustrating the second structure theorem (Corollary 4 below).
Structure of Embedded Planar Domains.
We describe next (Theorems 3 and 4 below) the two main structure theorems for nonsimply connected embedded minimal planar domains. Each of these theorems has a compactness theorem as a consequence. The first structure theorem deals with surfaces without small necks.
Theorem 3.
Any nonsimply connected embedded minimal planar domain without small necks can be obtained from gluing together two oppositely oriented double spiral staircases. Moreover, if for some point the curvature is large, then the separation between the sheets of the double spiral staircases is small. Note that because the two double spiral staircases are oppositely oriented, then one remains at the same level if one circles both axes.
The following compactness result is a consequence.
Corollary 3.
A ULSC (but not simply connected) sequence of embedded minimal surfaces with curvatures blowing up has a subsequence that converges smoothly to a foliation by parallel planes away from two lines. The two lines are disjoint and orthogonal to the leaves of the foliation, and the two lines are precisely the points where the curvature is blowing up.
This corollary is similar to the case of disks, except that we get two singular curves for nondisks as opposed to just one singular curve for disks. Moreover, locally around each of the two lines the surfaces look like a helicoid around the axis, and the orientation around the two axes are opposite.
Despite the similarity of Corollary 3 to the case of disks, it is worth noting that the results for disks do not alone give this result. Namely, even though the ULSC sequence consists locally of disks, the compactness result for disks was in the global case where the radii go to infinity. One might wrongly assume that Corollary 3 could be proven by using the results for disks and a blow-up argument. However, one can construct local examples that show the difficulty of such an argument.
The second structure theorem deals with surfaces with small necks and gives a pair of pants decomposition.
Theorem 4.
Any nonsimply connected embedded minimal planar domain with a small neck can be cut along a collection of short curves. After the cutting, we are left with graphical pieces that are defined over a disk with either one or two subdisks removed (a topological disk with two subdisks removed is called a pair of pants). Moreover, if for some point the curvature is large, then all of the necks are very small.
The following compactness result is a consequence.
Corollary 4.
A sequence of embedded minimal planar domains that are not ULSC, but with curvatures blowing up, has a subsequence that converges to a collection of flat parallel planes.
Genus-One Helicoid: Structure Results for General Finite Genus
In a very recent paper, Weber et al. (1) constructed a new complete embedded minimal surface in R3. They showed that there exists a properly embedded minimal surface of genus one with a single end asymptotic to the end of the helicoid. We will refer to this minimal surface Σ as the genus-one helicoid (see Fig. 7). Under scalings, the sequence of genus one-surfaces aiΣ, where ai → 0, converges to the foliation of flat parallel planes in R3 just like a sequence of rescaled helicoids with curvatures blowing up. This convergence is in fact a consequence of a general result that the theorems in the previous section, stated for planar domains, also hold for sequences with fixed genus with minor changes (see ref. 16).
Embedded Minimal Surfaces Are Automatically Proper
Implicit in all of the results mentioned above was an assumption that the minimal surfaces were proper. However, as we will see next, it turns out that embedded minimal surfaces are, in fact, automatically proper. This properness was the content of the Calabi–Yau conjectures that were proven to be true for embedded surfaces in ref. 11.
What Is Proper?
An immersed surface in R3 is “proper” if the preimage of any compact subset of R3 is compact in the surface. For instance, a line is proper, whereas a curve that spirals infinitely into a circle is not.
The Calabi–Yau Conjectures: Statements and Examples.
The Calabi–Yau conjectures about surfaces date back to the 1960s. Their original form was given in 1965 (17) where Calabi made the following two conjectures about minimal surfaces.m
Conjecture 1.
“Prove that a complete minimal surface in R3 must be unbounded.”
Calabi continued: “It is known that there are no compact minimal surfaces in R3 (or of any simply connected complete Riemannian 3-dimensional manifold with sectional curvature ≤ 0). A more ambitious conjecture is [as follows]”:
Conjecture 2.
“A complete [nonflat] minimal surface in R3 has an unbounded projection in every line.”
The immersed versions of these conjectures turned out to be false. Namely, Jorge and Xavier (3) constructed nonflat minimal immersions contained between two parallel planes in 1980, giving a counterexample to the immersed version of the more ambitious Conjecture 2. Another significant development came in 1996, when Nadirashvili (4) constructed a complete immersion of a minimal disk into the unit ball in R3, showing that Conjecture 1 also failed for immersed surfaces (see ref. 21 for other topological types).
The main result in ref. 11 is an effective version of properness for disks, giving a chord-arc bound.n Obviously, intrinsic distances are larger than extrinsic distances, so the significance of a chord-arc bound is the reverse inequality, i.e., a bound on intrinsic distances from above by extrinsic distances.
Given such a chord-arc bound, one has that as intrinsic distances go to infinity, so do extrinsic distances. Thus, an immediate consequence is the following:
Theorem 5.
A complete embedded minimal disk in R3 must be proper.
Theorem 5 gives immediately that the first of Calabi’s conjectures is true for embedded minimal disks. In particular, Nadirashvili’s (4) examples cannot be embedded.
Another immediate consequence of the chord-arc bound together with the one-sided curvature estimate (i.e., Theorem 2) is a version of that estimate for intrinsic balls.
As a corollary of this intrinsic one-sided curvature estimate, we get that the second, and more ambitious, of Calabi’s conjectures is also true for embedded minimal disks. In particular, Jorge and Xavier’s examples (3) cannot be embedded. The second Calabi conjecture (for embedded disks) is an immediate consequence of the following half-space theorem:
Theorem 6.
The plane is the only complete embedded minimal disk in R3 in a half-space.
Note that Theorem 6 is a by-product of the proof of Theorem 5. However, given Theorem 5, Theorem 6 follows from the half-space theorem of ref. 22.
The results for disks imply both of Calabi’s conjectures and properness also for embedded surfaces with finite topology. A surface Σ is said to have finite topology if it is homeomorphic to a closed Riemann surface with a finite set of points removed or “punctures.” Each puncture corresponds to an end of Σ.
Acknowledgments
We thank C. H. Colding, L. Hesselholt, N. Hingston, and D. Hoffman for helpful comments and particularly Matthias Weber for making the figures. T.H.C. and W.P.M. were supported in part by National Science Foundation Grants DMS 0104453, DMS 0606629, and DMS 0405695.
Abbreviation
- ULSC
uniformly locally simply connected.
Footnotes
Conflict of interest statement: No conflicts declared.
This paper was submitted directly (Track II) to the PNAS office.
eRiemann worked on minimal surfaces in the period 1860–1861. He died in 1866. The Riemann example was published postmortem in 1867 in an article edited by Poggendorf.
fThe field of minimal surfaces dates back to the publication in 1762 of Lagrange‘s famous memoir, “Essai d’une nouvelle méthode pour déterminer les maxima et les minima des formules intégrales indéfinies.” Euler had already, in a paper published in 1744, discussed minimizing properties of the surface now known as the catenoid, but he only considered variations within a certain class of surfaces.
gMeusnier had been a student of Monge. He also discovered that the surface now known as the catenoid is minimal in the sense of Lagrange, and he was the first to characterize a minimal surface as a surface with vanishing mean curvature. Unlike the helicoid, the catenoid is not topologically a plane but rather a cylinder. (The catenoid will be explained later; see Eq. 6).
iRecall that for a minimal surface in R3 the curvature K = − |A| 2 is nonpositive, so that by the curvatures of a sequence is going to infinity, we mean that K → −∞ or, equivalently, |A|2 → ∞.
jRecall that our results require only that we have a piece of a minimal surface, and thus it may have boundary.
kThe parallel to the helicoid is striking. Half of the helicoid, i.e., (s cos t, s sin t, t), where s > 0 and t ∈ R, can be obtained by stacking the N-valued graphs, (s cos(kN2π + t), s sin(kN2π + t), kN2π + t), where s > 0, N2π > t ≥ 0, and k is an integer, on top of each other.
lBy “without small necks,” we mean that the intersection of the surface with all extrinsic balls with sufficiently small radii consists of simply connected components (compare the notion of ULSC for sequences above).
mS. S. Chern (18) also promoted these conjectures at approximately the same time, and they were revisited several times by S. T. Yau (19, 20).
nA chord-arc bound is a bound above and below for the ratio of intrinsic to extrinsic distances.
References
- 1.Weber M., Hoffman D., Wolf M. Proc. Natl. Acad. Sci. USA. 2005;102:16566–16568. doi: 10.1073/pnas.0508008102. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 2.Hoffman D., Weber M., Wolf M. Ann. Math. 2006 in press. [Google Scholar]
- 3.Jorge L., Xavier F. Ann. Math. 1980;112:203–206. [Google Scholar]
- 4.Nadirashvili N. Invent. Math. 1996;126:457–465. [Google Scholar]
- 5.Bernstein S. Comm. Soc. Math. Kharkov. 1916;15:38–45. [Google Scholar]
- 6.Colding T. H., Minicozzi W. P., II Ann. Math. 2004;160:27–68. [Google Scholar]
- 7.Colding T. H., Minicozzi W. P., II Ann. Math. 2004;160:69–92. [Google Scholar]
- 8.Colding T. H., Minicozzi W. P., II Ann. Math. 2004;160:523–572. [Google Scholar]
- 9.Colding T. H., Minicozzi W. P., II Ann. Math. 2004;160:573–615. [Google Scholar]
- 10.Meeks W., III, Rosenberg H. Ann. Math. 2005;161:727–758. [Google Scholar]
- 11.Colding T. H., Minicozzi W. P., II The Calabi–Yau Conjectures for Embedded Surfaces. 2004 preprint. [Google Scholar]
- 12.Schoen R. J. Differ. Geom. 1983;18:791–809. [Google Scholar]
- 13.Collin P. Ann. Math. 1997;145:1–31. [Google Scholar]
- 14.Colding T. H., Minicozzi W. P., II Duke Math. J. 2001;107:421–426. [Google Scholar]
- 15.Meeks W., III, Perez J. In: Eigenvalues of Laplacians and Other Geometric Operators, Surveys in Differential Geometry. Grigor’yan A., Yau S.-T., editors. Vol. 9. Somerville, MA: International; 2004. pp. 275–336. [Google Scholar]
- 16.Colding T. H., Minicozzi W. P., II The Space of Embedded Minimal Surfaces of Fixed Genus in a 3-Manifold V: Fixed Genus. 2005 preprint. [Google Scholar]
- 17.Calabi E. Proceedings of the United States–Japan Seminar in Differential Geometry Kyoto, Japan, 1965. Tokyo: Nippon Hyoronsha; 1996. p. 170. [Google Scholar]
- 18.Chern S. S. Bull. Am. Math. Soc. 1966;72:167–219. [Google Scholar]
- 19.Yau S. T. Ann. Math. Studies. 1982;102:669–706. [Google Scholar]
- 20.Yau S. T. Review of Geometry and Analysis. RI: Am. Math. Soc., Providence; 2000. Mathematics: Frontiers and Perspectives; pp. 353–401. [Google Scholar]
- 21.Lopez F., Martin F., Morales S. J. Differ. Geom. 2002;60:155–175. [Google Scholar]
- 22.Hoffman D., Meeks W., III Invent. Math. 1990;101:373–377. [Google Scholar]