

Abstract
In five experiments, we investigated the effects of visual exposure to a real hand, a rubber hand, or a wooden block on reaching movements made with the unseen left hand behind a parasagittal mirror. Participants reached from one of four starting positions, corresponding to four levels of conflict between the proprioceptively- and visually-specified position of the reaching hand. Reaching movements were affected most by exposure to the real hand, intermediately by the rubber hand, and least of all by the wooden block. When the posture and/or movement of the visible hand was incompatible with that of the reaching hand, the effect on reaching was reduced. A ‘rubber hand illusion’ questionnaire revealed that illusions of ownership of the rubber hand were not strongly correlated with reaching performance. This research suggests that proprioception recalibrates following visual exposure to prosthetic hands, and that this recalibration is independent of the rubber hand illusion.
Keywords: Rubber Hand, Illusion, Mirror, Proprioception, Vision, Reaching, Multisensory Integration
In order to reach toward a visible target, the brain needs to know the initial position of the reaching hand so that the correct movement direction and distance can be encoded (e.g., Rossetti, Desmurget, & Prablanc, 1995). When reaching for objects in the dark, or when our arm is hidden from view, we must rely on proprioception to specify the initial position of the hand in relation to the target. If, instead of reaching ‘blind,’ we are provided with some visual information about the initial position of the hand, such as a brief glimpse of the hand, or a visual marker signifying its position, proprioception, and subsequent reaching movements may then be more accurate (e.g., Desmurget, Rossetti, Jordan, Meckler, & Prablanc, 1997; Newport, Hindle, & Jackson, 2001; Rossetti, Stelmach, Desmurget, Prablanc, & Jeannerod, 1994; Rossetti et al., 1995; Wann & Ibrahim, 1992, though see Bédard & Proteau, 2001; Sarlegna, Blouin, Bresciani, Bourdin, Vercher, & Gauthier, 2004, for alternative views). Visual information for updating the felt position of the hands can also be provided by using a mirror aligned with the body midline, projecting the reflection of one hand into the apparent position of the other (Altschuler, Wisdom, Stone, Foster, Galasko, Llewellyn, & Ramachandran, 1999; Franz & Packman, 2004; Holmes, Crozier, & Spence, 2004; Holmes & Spence, 2005; Ramachandran & Rogers-Ramachandran, 1996; Ramachandran, Rogers-Ramachandran, & Cobb, 1995; Ro, Wallace, Hagedorn, Farnè, & Pienkos, 2004; Sathian, Greenspan, & Wolf, 2000). When the two hands are aligned equidistantly from the mirror on either side, vision and proprioception provide complementary evidence concerning the position of the unseen hand. However, when the hands are placed at unequal distances from the mirror, visually- and proprioceptively-specified hand positions are inconsistent.
Mirror-induced conflicts between vision and proprioception have been shown to exert a bias on subsequent reaching movements made with the hand behind the mirror (Holmes et al., 2004; Holmes & Spence, 2005; see also Burnett, 1904; Nielsen, 1963, Ro et al., 2004, for related effects of mirror-induced multisensory conflicts). Our previous work suggests that this reaching bias is caused by a gradual process of recalibration of the proprioceptively-specified position of the hand toward the visually-specified position of the hand, prior to the onset of the reaching movement itself (Holmes & Spence, 2005). This process seems to be incremental, but quite rapid, since we found that reaching errors increased with increases in the duration of visual exposure to the incompatible hand position, from very little bias (compared to a no-mirror control condition) after 4 seconds’ exposure, to stronger and significant biases after 8 and 12 seconds’ exposure (Holmes & Spence, 2005).
While it is known that this reaching bias occurs when participants view their own, non-reaching hand reflected in a mirror, the critical sensory information sufficient to induce this bias is unknown. If the critical information is visual in nature then a visually-presented object that looks similar to one’s own hand might be sufficient to induce a spatial bias in reaching movements. If the critical information is postural or proprioceptive, however, reaching biases may only occur when the participants’ two hands are positioned approximately symmetrically about the mirror (i.e., there may be some contribution of bilateral proprioceptive information to the apparently ‘visual’ mirror illusion). Finally, if the critical information is indeed visual, then one might predict that the more the visual input resembles the participants’ real hand, the more reaching will be biased. Under this prediction, vision of a prosthetic hand, for example, will induce more reaching bias than vision of a hand-sized block of wood. In order to investigate the sensory information required to induce such a bias in reaching movements, it may therefore be informative to expose participants to mirror-reflections of their own non-reaching hand, an artificial rubber hand, or to a block of wood of similar dimensions to their hands, and to examine the effect of such exposure on subsequent reaching movements.
Stimuli such as prosthetic hands have been used frequently in recent years to investigate multisensory aspects of body representation and ownership (Armel & Ramachandran, 2004; Austen, Soto-Faraco, Enns, & Kingstone, 2004; Botvinick & Cohen, 1998; Ehrsson, Spence, & Passingham, 2004; Farnè, Pavani, Meneghello, & Làdavas, 2000; Kennett, Taylor-Clarke, & Haggard, 2001; Niebauer, Aselage, & Schutte, 2002; Pavani, Spence, & Driver, 2000; Peled, Pressman, Geva, & Modai, 2003; Peled, Ritsner, Hirschmann, Geva, & Modai, 2000; Rorden, Heutink, Greenfield, & Robertson, 1999; Tsakiris & Haggard, 2005; see also Tastevin, 1937). When artificial rubber hands are placed in a position that is compatible with participants’ current posture (i.e., in an anatomically plausible position with respect to the participants’ own body), visual stimulation of the rubber hand coupled with tactile stimulation of the participants’ own hand (which is hidden from view) induces, in many people, the illusory feeling that the visible rubber hand is the participants’ own hand (Botvinick & Cohen, 1998; Ehrsson et al., 2004). Such ‘rubber hand illusions’ are eliminated or substantially reduced (in persistence or intensity) when the visual and tactile stimuli are applied asynchronously to the two hands, or when the rubber hand is placed in an anatomically implausible posture.
In the rubber hand illusion, participants are typically asked to rate the strength of the illusion using a visual-analogue scale to indicate the strength of their agreement with a variety of questionnaire statements. However, since such questionnaire ratings may be subject to experimental biases or demand effects, experimenters have often also included a post-illusion reaching and pointing response, where participants point with one hand (the ‘unexposed’ or non-stimulated hand) to the felt position of the other hand (the exposed hand). Typically, the strength of the illusion as determined from the questionnaire ratings is strongly correlated with errors in the post-exposure pointing responses (Botvinick & Cohen, 1998). These pointing errors have been taken to provide a measure of proprioceptive changes in the exposed arm and hand, and, therefore, a more objective measure of the rubber hand illusion itself than subjective reports concerning the illusory experience.
Despite the usage of post-exposure pointing as an objective correlate of the rubber hand illusion, it has yet to be determined whether such shifts in the felt position of the exposed hand represent either a cause, a consequence, or an epiphenomenal correlate of the rubber hand illusion itself. If recalibration of proprioception following exposure to a rubber hand is either a necessary prerequisite, or is causally unrelated to the rubber hand illusion, then it ought to be possible to induce proprioceptive changes (and therefore affect subsequent reaching movements) without inducing the illusion itself. Alternatively, if proprioceptive changes are a consequence of the rubber hand illusion, then any changes in proprioception following visual exposure to rubber hands should be strongly associated with the illusory experience of ‘ownership’ of the rubber hand.
The aims of the experiments reported here were first to try to resolve the issue of the nature of the sensory information that is critical or sufficient to induce or enhance reaching biases in the ‘mirror illusion,’ and second to determine whether viewing a rubber hand prior to executing a reaching movement can exert significant reaching biases in the absence of any deliberate attempt to induce (on the part of the experimenter) or to experience (on the part of the participant) any ‘rubber hand illusion.’
Experiment 1
In Experiment 1, we examined the influence of prior visual exposure to the reflection of a prosthetic rubber hand on the endpoints of subsequent reaching and pointing movements as an index of the felt location of the hand immediately prior to the movement. We compared the effects of visual exposure to a real hand, a rubber hand, and to a block of wood. If reaching movements are biased equally by prior visual exposure to any visually-presented object in the approximate location of the participants’ own reaching hand, then there should be no difference between reaching movements under these three visual exposure conditions (the visual object hypothesis). By contrast, if prior exposure to very precise visual information, or if prior exposure to near bilateral symmetry of the participants’ arms is required for the reaching bias to emerge, then only the real hand condition should induce strong reaching biases (the real hand or bilateral proprioceptive hypothesis). Finally, if prior exposure to only approximate visual information concerning hand position is required, and if bilateral proprioceptive information is not critical, then reaching in the rubber hand condition should be biased more than in the wooden block condition (the rubber hand hypothesis).
Methods
Participants
Eighteen right-handed participants (aged 19–32 years, 11 female), recruited by advertisement from the general population of students, staff, and visitors to Oxford University, took part in Experiment 1. The participants were either reimbursed five pounds (UK sterling) for their time, or else participated for course credit. The experiment was approved by the local ethics committee and participants gave their informed consent prior to participation.
Materials
A rectangular mirror (30 x 45 cm, see Figure 1) was positioned vertically on a table (62 x 122 cm) with the reflective surface facing rightwards (all directions are given with respect to the participants, unless otherwise specified), immediately to the right of a platform (45 x 45 cm, raised 20 cm off the table). Under the platform, 30 cm from the near edge of the table, four left hand position marks were drawn onto a sheet of paper, 7.5, 12.5, 17.5, and 22.5 cm to the left of the mirror’s reflective surface. A similar mark was positioned 15 cm to the left of the mirror, and 50 cm from the near edge of the table. This mark represented the target position. Two further marks were positioned 15 cm to the right of the mirror: The first mark was 30 cm from the near edge of the table and served as the right hand position mark (and also the position for the index finger of the rubber hand and the corner of the wooden block in their respective conditions); The second mark was 50 cm from the near edge of the table and provided a ‘virtual target position’ when viewed in the mirror. A 1 m square opaque black cloth was attached to the nearest side of the platform, covering the participants’ left arm and shoulder. A small curved screen was constructed from a 21 x 29 cm sheet of white paper, and was positioned 22.5 cm to the right of the mirror, at a slight angle away from the mirror, approximately parallel to the participants’ arm and the rubber hand / wooden block, and positioned about 30 cm from the mirror surface. When participants placed their right arm and hand behind this screen, their arm and hand were not visible in the mirror. The table was covered with white paper to provide a homogenous background surface.
Figure 1.

Experimental apparatus as seen from the experimenter’s viewpoint. The participants sat with their right hand either behind the paper screen (as shown) or in the same position as the rubber hand. The participants’ left hand was positioned inside the mirror box, shielded from view by the opaque cloth and mirror. The wooden block is shown next to the rubber hand for illustrative purposes only, and was moved into the position of the rubber hand during testing. The LED was used for Experiment 5 only, serving as a fixation point and a visual target. In Experiments 1–4, participants fixated the index finger of the rubber hand, their real hand, or the far left lower corner (from their perspective) of the wooden block.
Three exposure objects were used: The participants’ real right hand, an artificial, realistic looking prosthetic right hand (approximately 16 cm from fingertips to wrist, plus approximately 4 cm in length of ‘forearm,’ 9 cm wide, 5 cm high), and a block of wood (7 x 4.5 x 20 cm). The rubber hand had a smooth, Caucasian complexion similar to that of a female’s hand, and corresponded in size and shape approximately to the hand of a 155 cm tall female. The skin characteristics of participants (i.e., colour, hairiness, and the presence of any spots or blemishes etc.) were not controlled, measured, or selected for in any way, as is typical in other studies using rubber hands (Botvinick & Cohen, 1998; Ehrsson et al., 2004). The experimenter did, however, record whether each participant was broadly ‘white’ or ‘non-white’ in skin colour in order to assess post-hoc any between-participant effects of skin colour. The experimenter used a stopwatch to time the visual exposure duration, and sheets of graph paper and four different coloured pens to mark the landing positions of reaching movements.
Design
The experiment followed a within-participants repeated measured design, with the independent variables of left hand position (four levels: 7.5, 12.5, 17.5, & 22.5 cm) and visual exposure condition (three condition: real hand, rubber hand, wooden block). The three experimental conditions were run in blocks of trials were presented in a fully counterbalanced order across participants. In each block, the four left hand positions were presented five times each in a randomised order.
Procedure
The participants were asked to sit at the table, and place their left arm behind the mirror. The cloth was draped over their left arm and shoulder to prevent direct vision of these body parts. The participants then placed their right arm behind the paper screen, and looked into the mirror at the reflection of the target position. Before the experiment proper began, participants were given practice at reaching to the target behind the mirror, attempting to place their left index finger on the target position. Verbal feedback (e.g., “too far left” or “too far right”) was provided on the accuracy of these practice reaches, and the experimenter moved the participants’ finger onto the target for additional feedback. As soon as participants were able to reach consistently (i.e., for at least 2 successive trials) to within 2 cm of the target location, the main experimental session began (a circle of 2 cm diameter and centred on the target was printed on the graph paper for assessing accuracy in the practice phase).
Each experimental block began with the experimenter placing the participants’ left hand onto the target as an initial reminder of the (proprioceptive) target location. Next, the experimenter placed the exposure object onto the right hand position mark. In the real hand condition, this object was the index finger of the participants’ right hand, in the rubber hand condition, the index finger of the rubber right hand was placed on the right hand mark, and the participants’ right hand was placed behind the paper screen. The rubber hand was oriented with its palm facing down (i.e., matching the posture of both the participants’ hands); in the wooden block condition, the furthest left lower corner of the wooden block was positioned on the right hand mark.
Each trial began with the experimenter moving the participants’ left index finger back (from the target on the first trial of each block, or from the previous reaching endpoint on all subsequent trials) to one of the left hand position marks according to a predetermined pseudorandomised sequence. The participants were then instructed to fixate the reflection of the exposure object in the mirror, looking leftwards toward the index finger of their own hand, the rubber hand, or the furthest lower end of the wooden block in the mirror (i.e., toward a position 15 cm to the left of the mirror, and 30 cm in front of the front edge of the table). This fixation position and posture was constant across visual exposure conditions, and was maintained for 12 seconds while the experimenter monitored a stopwatch and checked to ensure the participants’ visual fixation. The experimenter then gave the verbal instruction “reach,” at which point the participant made an eye movement to gaze at the (reflected) target location 20 cm to the front, then reached with the left hand and made a single, smooth, uncorrected, and rapid movement as accurately as possible toward the target position (i.e., as if seen ‘through’ the mirror). Participants were instructed to gaze toward the virtual target location just prior to and during the reaching movement, to leave their index finger in the position where it first touched the table behind the mirror, and not to make any end-point corrections after touching down on the table surface.
The experimenter marked the landing position of the participants’ left index finger on the graph paper using a different colour pen for each starting position. Since we were interested only in errors made in the left-right (x) direction, for the sake of clarity, the experimenter occasionally offset some endpoint marks in the front-back (y) direction in order to avoid superimposing endpoint marks on top of each other. The participants’ index finger was then returned to the starting position for the next trial. No feedback on target pointing accuracy was provided before, during, or after the individual trials or the experimental conditions as a whole. Participants were given a short break after each block of trials, during which time the experimenter changed the graph paper and visual exposure object in preparation for the next condition.
The layout of the left hand position marks, the right hand position mark, and the target location meant that the conflict induced between the visually- and the proprioceptively-specified left hand position was, from right to left −7.5 cm (the 7.5 cm left hand position mark) −2.5 cm (12.5 cm mark), +2.5 cm (17.5 cm mark), and +7.5 cm (the 22.5 cm mark, where positive values represent real (proprioceptive) left hand positions to the left of the apparent (visual) left hand position, and negative values to the right of the apparent position). In all cases, the apparent position of the left hand suggested a straight-ahead reaching movement to meet the target, whereas all the actual left hand positions required a diagonal reach either rightwards (the 7.5 & 12.5 cm starting positions) or leftwards (the 17.5 & 22.5 cm starting positions). ‘Visual biases’ of the reaching movements will therefore be evident when the reaching movements are too straight, and fall too short of the target position on the same side as the starting position.
It is important to note that the visual target location was always present and clearly visible throughout all blocks of trials, and the reaching task and hand positions were identical between visual exposure conditions. Furthermore, participants were only instructed to make a quick reaching movement toward the visible target following the reach command, and at no point were they encouraged or directed by the experimenter to think about the felt location of their hand, or to try to remember the initial location of their hand at the start of the exposure period. The constant presence of the visual target ensured that participants did not need to remember the proprioceptively-specified location of the target, since the task required only a rapid uncorrected reaching and pointing movement from the current location of the hand at the end of the exposure period toward the visual target.
Results
Analysis
The endpoints of the reaching movements were recorded in one dimension only, the left-right or x-dimension perpendicular to the plane of the mirror. Reaches were measured on the graph paper to the nearest millimetre. Reaching errors to the left of the target were assigned a positive endpoint error, and errors to the right were assigned negative values. The mean (constant error) and the standard error (variable error) of the mean reaching error across participants were entered into a two-way repeated measures analysis of variance (ANOVA) with the within-participant variables of left hand position and exposure condition. These data are displayed graphically in Figure 2, and the ANOVA statistics are displayed in Table 1. Separate analyses were performed with the additional variables of block order, gender, and skin colour to assess for practise and between-participants effects respectively. To provide an intuitive measure of the size of the visual bias effect, the slope of the best fit linear regression equation that described the dependence of the endpoint errors on the starting position was calculated, and expressed as a percentage (for example, a regression slope of 0.3 would correspond to a 30% reaching bias, or to a 30% weighting of vision, and 70% to proprioception in producing the reaching movement). In all cases unless otherwise stated, the data are reported are the mean of the means across participants ± the standard error of the means across participants.
Figure 2.
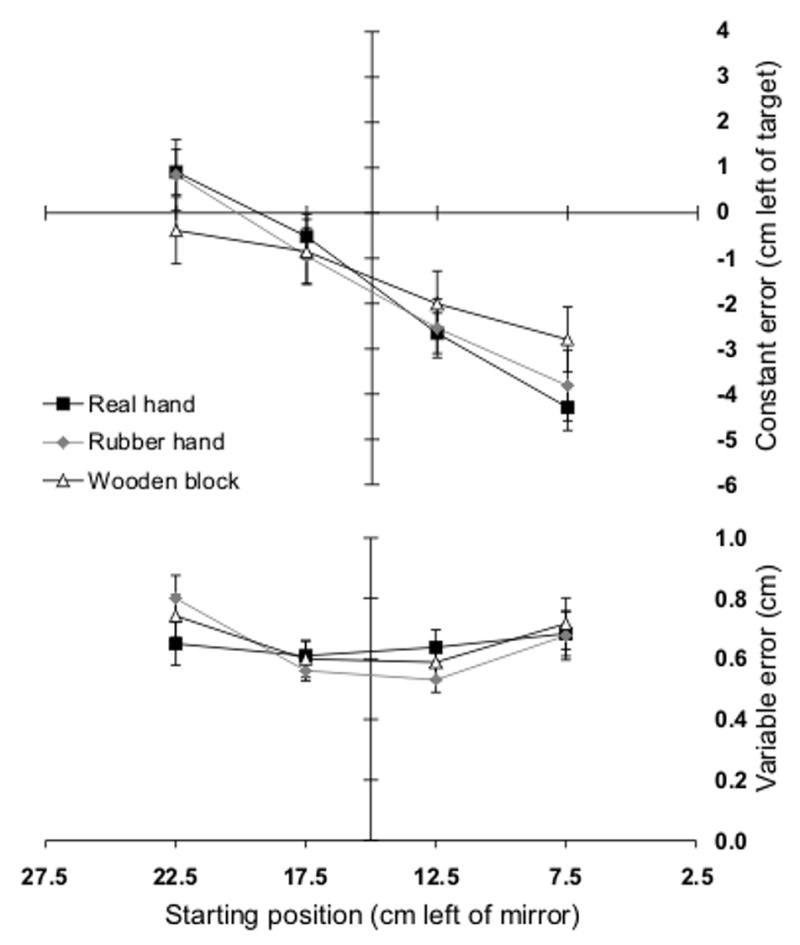
Mean (± SE) endpoint errors for reaching movements in Experiment 1. Left hand starting positions are displayed from right to left, as if viewed from the participants’ perspective. Upper panel – constant reaching error (M ± SE of the mean reaching error). Lower panel – variable reaching error (M ± SE of the standard error of the mean reaching error).
Table 1.
Analysis of variance (ANOVA) statistics for Experiments 1, 2, 3, and 5. Statistics for the main effects of hand position and exposure condition, and the interaction between these variables are presented. d.f. – degrees of freedom. SE –standard error of the mean. X – errors in the x-direction (perpendicular to the mirror). Y – errors in the y-direction (parallel with the mirror).
|
Left hand position
|
Exposure condition
|
Left hand position X Exposure condition
|
||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Experiment | Measure | d.f. | F | p | d.f. | F | p | d.f. | F | p |
| 1 | Mean | 3, 51 | 100.25 | < .001 | 2, 34 | 0.03 | .98 | 6, 102 | 9.21 | < .001 |
| SE | 3, 51 | 6.13 | < .001 | 2, 34 | 0.14 | .87. | 6, 102 | 0.84 | .54 | |
| 2 | Mean | 3, 60 | 71.70 | < .001 | 2, 40 | 0.35 | .71 | 6, 120 | 4.38 | < .01 |
| SE | 3, 60 | 1.71 | .18 | 2, 40 | 4.73 | < .05 | 6, 120 | 1.49 | .19 | |
| 4 | Mean | 3, 33 | 147.42 | < .001 | 2, 22 | 0.46 | .64 | 6, 66 | 7.38 | < .001 |
| SE | 3, 33 | 2.34 | .09 | 2, 22 | 0.03 | .97 | 6, 66 | 0.33 | .92 | |
| 5 | Mean X | 3, 33 | 24.70 | < .001 | 1, 11 | 0.97 | .35 | 3, 33 | 11.50 | < .001 |
| SE X | 3, 33 | 7.77 | < .001 | 1, 11 | 0.62 | .45 | 3, 33 | 1.15 | .34 | |
| Mean Y | 3, 33 | 3.02 | < .05 | 1, 11 | 0.81 | .39 | 3, 33 | 1.79 | .17 | |
| SE Y | 3, 33 | 0.39 | .76 | 1, 11 | 0.07 | .79 | 3, 33 | 0.52 | .67 | |
| RT | 3, 33 | 0.56 | .64 | 1, 11 | <0.01 | .96 | 3, 33 | 0.90 | .45 | |
| Errors | 3, 33 | 2.76 | .06 | 1, 11 | 0.80 | .39 | 3, 33 | 1.31 | .29 | |
Constant error
The upper panel of Figure 2 shows the mean and standard error of the mean constant terminal reaching error across participants, broken down by starting position and visual exposure condition. In general, reaching movements were biased by 1.6 ± 0.2 cm toward the right side of the workspace – toward the mirror. This general bias was similar between visual exposure conditions (real hand = −1.6 ± 0.3 cm, rubber hand = −1.6 ± 0.4 cm, wooden block = −1.5 ± 0.4 cm, where negative values represent endpoints to the right of the target), and is probably attributable to the asymmetrical posture that participants adopted in order to see their hands in the mirror: The participants’ body midline was slightly to the right of the mirror, and unseen reaching movements often show general biases toward the midline (e.g., Ghilardi, Gordon, & Ghez, 1995). In addition, reaching movements were in general too short – underestimating the lateral distance to the target. This is reflected in the significant main effect of left hand position, and in the slope of the graphs across starting position for each condition. Most importantly, however, is that the size of this endpoint bias (reflected in the gradient of the slope in Figure 2) depended significantly upon the visual exposure condition (i.e., a significant interaction between left hand position and exposure condition). Reaching movements following visual exposure to a real hand were significantly more biased than those following exposure to the wooden block. More importantly, exposure to the rubber hand also resulted in significantly stronger bias when compared with the wooden block condition. Separate ANOVAs comparing all pairings of the three conditions confirmed that there was no significant difference between reaching behaviour in the real hand versus the rubber hand conditions (interaction of left hand position and exposure condition, F(3, 51) = 1.94, p = .14, but that reaching errors in both of these conditions differed significantly from the wooden block condition (real hand vs. wooden block, F(3, 51) = 16.66, p < .001; rubber hand vs. wooden block, F(3, 51) = 8.20, p < .001. The reaching errors, expressed as a percentage of the lateral distance from the starting position to the target (derived from the linear regression slope relating the start positions with their respective mean endpoint errors across participants) were 35.5 ± 2.3% in the real hand condition, 31.1 ± 3.4% in the rubber hand condition, and 16.7 ± 3.0% in the wooden block condition.
Variable error
The variable error (the standard error of the mean reaching error per participant) data are displayed in the lower panel of Figure 2, and the ANOVA statistics are presented in Table 1. There were no significant effects of, or interactions involving, the visual exposure condition, with variability approximately equal across the three conditions (real hand = 0.65 ± 0.03 cm, rubber hand = 0.64 ± 0.03 cm, wooden block = 0.66 ± 0.03 cm). Reaching endpoint variability was, however, significantly affected by the left hand position. Reaching movements from the two outermost starting positions were more variable than the two innermost starting positions (7.5 cm = 0.69 ± 0.04 cm, 12.5 cm = 0.58 ± 0.04 cm, 17.5 cm = 0.59 ± 0.03 cm, 22.5 cm = 0.73 ± 0.03 cm).
Discussion
These results demonstrate that reaching movements were biased to a similar extent by 12 seconds of visual exposure to an artificial hand as by exposure to a real hand, although there was a trend toward a greater visual bias following exposure to the participants’ real hand. Passive exposure to a wooden block, by contrast, had a smaller effect on subsequent reaching movements than exposure to either the real hand or to the rubber hand. These results favour the ‘rubber hand hypothesis’ – that the visual information concerning arm position available via the reflection of a rubber hand is sufficient to increase the visual bias of reaching under conditions of visual-proprioceptive conflict, and contrast with both the ‘visual object hypothesis’ and the ‘real hand / bilateral proprioceptive hypothesis.’
There was a bias in reaching movements in the wooden block conditions, corresponding to an under-reach of about 17% of the lateral distance to the target. This residual bias is slightly larger than the bias observed in previous control conditions involving no wooden block or no mirror reflection at all (range: 8 – 15%, Holmes et al., 2004; Holmes & Spence, 2005). There were no significant effects of the visual exposure condition on the variable reaching error, indicating that participants were equally precise across experimental conditions, but that their reaching movements were biased in a constant manner according to the direction and size of the visual-proprioceptive conflict.
Our results suggest that the mechanism responsible for updating the felt position of the hand prior to reaching movements only has access to very basic information concerning the hand, which probably includes its shape and approximate orientation, since the reflection of a rubber hand was as effective as of a real hand in altering reaching movements. However, even basic visual aspects of the rubber hand such as the colour of its skin, and its gender (and therefore its size and visual similarity relative to the average participants’ hand) were not important factors in influencing reaching movements (separate between-participants ANOVAs, including gender and skin colour, which are not reported here, showed no significant effects of these variables on the interaction between the visual exposure condition and left hand position variables). Before accepting these conclusions, however, several other possible explanations for the altered reaching movements need to be ruled out.
First, it is possible that the visual bias of reaching by a rubber hand in Experiment 1 was due to the rubber hand being a visually more interesting object than the block of wood. That is, participants may simply have paid more attention to, or concentrated more upon, the available visual information over proprioceptive information in the real and rubber hand conditions than in the wooden block condition. Second, the position of the participants’ real right hand in the first experiment was not constant across conditions: In the real hand condition, it was placed 15 cm to the right of the mirror, but in both the rubber hand and wooden block conditions, the right hand was placed about 30 cm to the right of the mirror. It is possible that this difference in the posture of the right hand may have contributed in some manner to the visual bias of reaching in Experiment 1.
Experiment 2
In order to rule out the alternative possibilities discussed above, we conducted a second experiment. Based on previous experimental findings (e.g., Ehrsson et al., 2004; Graziano, Cooke, & Taylor, 2000; Pavani et al., 2000), we hypothesised that simply changing the orientation of the rubber hand, making it incompatible with that of the real hand, would affect the hypothesised visually-induced reaching bias: A rubber hand placed in the same orientation as the participants’ own reaching hand (i.e., palm facing down), would increase the constant endpoint error compared both to a rubber hand in an incompatible orientation to the reaching hand (i.e., palm facing up), and to a wooden block. We assumed that a rubber hand in a palm-up posture should be visually as interesting or attention-capturing as a palm-down rubber hand, therefore controlling for a possible confounding effect of this ‘visual-interest’ factor. Further, in Experiment 2, only one position for the participants’ real non-reaching hand was used across all experimental conditions, to control for any potentially confounding effects of the posture of the right hand on reaching movements made with the left hand. In Experiment 2, participants were therefore never exposed to the reflection of their own right hand during the experiment. Finally, it is also possible that the ‘mirror illusion’ or the ‘rubber hand illusion’ is itself an attention-capturing phenomenon, and may have led to an increased reliance on visual information in planning and executing the reaching movement. We therefore decided to characterise any subjective aspects of the mirror-conflict illusion, and to attempt to correlate those aspects with any reaching biases, by administering a ‘rubber hand illusion’ questionnaire, similar to, and adapted from, those used elsewhere (e.g., Botvinick & Cohen, 1998; Ehrsson et al., 2004; Pavani et al., 2000).
Methods
Experiment 2 was identical to Experiment 1 except for the following details.
Participants
Twenty-one new participants (aged 19–40 years, 16 female, 1 left-handed by self-report) were recruited.
Design
The visual exposure conditions included both the rubber hand and wooden block conditions, and a new condition was added to replace the real hand condition of Experiment 1, in which the rubber hand was placed palm-up on the table (rubber palm-up). Additionally, a 10-item questionnaire was constructed. It consisted of a modified version of Botvinick and Cohen’s (1998) questionnaire, concerning any changes in the felt position, movement, identity, or ownership of the objects and the participants’ own hands experienced during the experiment. Questions were arranged vertically on the questionnaire sheet in a randomised order between participants, but in the same order between conditions within participants.
Procedure
In Experiment 2, participants never viewed their own hand, which was placed behind the paper screen throughout the experiment. The questionnaire given to each participant after the experiment had been completed. Responses were recorded on a 7-point scale ranging from strongly disagree to strongly agree. These responses were assigned numerical values from –3 to +3, treated as parametric data, and correlated with the regression slope data, as used in the original ‘rubber hand illusion’ experiments (Botvinick & Cohen, 1998). Differences in the questionnaire data between experimental conditions were assessed with repeated measures ANOVAs. Details of the questions asked in this questionnaire are provided in Figure 4. Participants were informed before the experiment that they would be asked to complete a questionnaire, but they were not informed that the questionnaire concerned subjective ratings of the rubber hand or the mirror illusions.
Figure 4.

Questionnaire results showing the ratings of subjective aspects of the ‘rubber hand illusion’ during the visual exposure period. The questions are arranged vertically in ascending order of the mean rating of agreement reported in the ‘rubber hand’ condition. Significant differences in one-way ANOVAs between conditions for each question considered separately, are indicated by asterisks as follows: * = p < .05; ** = p < .01, *** = p < .001. Bars show mean ± SE.
Results
Constant error
The reaching error data are presented in the upper panel of Figure 3, and the ANOVA statistics in Table 1. The overall mean reaching error was −2.5 ± 0.2 cm, and there was no main effect of visual exposure condition on this general rightward error (rubber hand palm-down = −2.3 ± 0.3 cm, rubber hand palm-up = −2.5 ± 0.3 cm, wooden block = −2.8 ± 0.3 cm). This general bias was 0.9 cm larger, but not significantly different from, the general rightward error in Experiment 1 (between-experiments ANOVA, F(1, 37) = 2.42, p = .13). As in Experiment 1, reaching movements were biased more by the rubber hand in a palm-down posture (31.8 ± 3.1%) than by the block of wood (22.1 ± 3.0%). The novel finding to emerge form Experiment 2 was that exposure to the incompatible rubber arm (22.0 ± 3.7%) also resulted in less bias of reaching movements than the compatible rubber arm. Separate ANOVAs comparing pairs of conditions confirmed that reaching behaviour in the rubber hand condition was significantly different from both the rubber palm-up (exposure condition, F(1, 20) = 0.08, p = .79; left hand position, F(3, 60) = 59.3, p < .001; left hand position by exposure condition interaction, F(3, 60) = 7.49, p < .001) and the wooden block conditions (exposure condition, F(1, 20) = 0.66, p = .42; left hand position, F(3, 60) = 78.4, p < .001; left hand position by exposure condition interaction, F(3, 60) = 5.30, p < .005). There was no significant difference between reaching in these latter two conditions (exposure condition, F(1, 20) = 0.28, p = .61; left hand position, F(3, 60) = 49.5, p < .001; left hand position by exposure condition interaction, F(3, 60) = 0.45, p .72).
Figure 3.
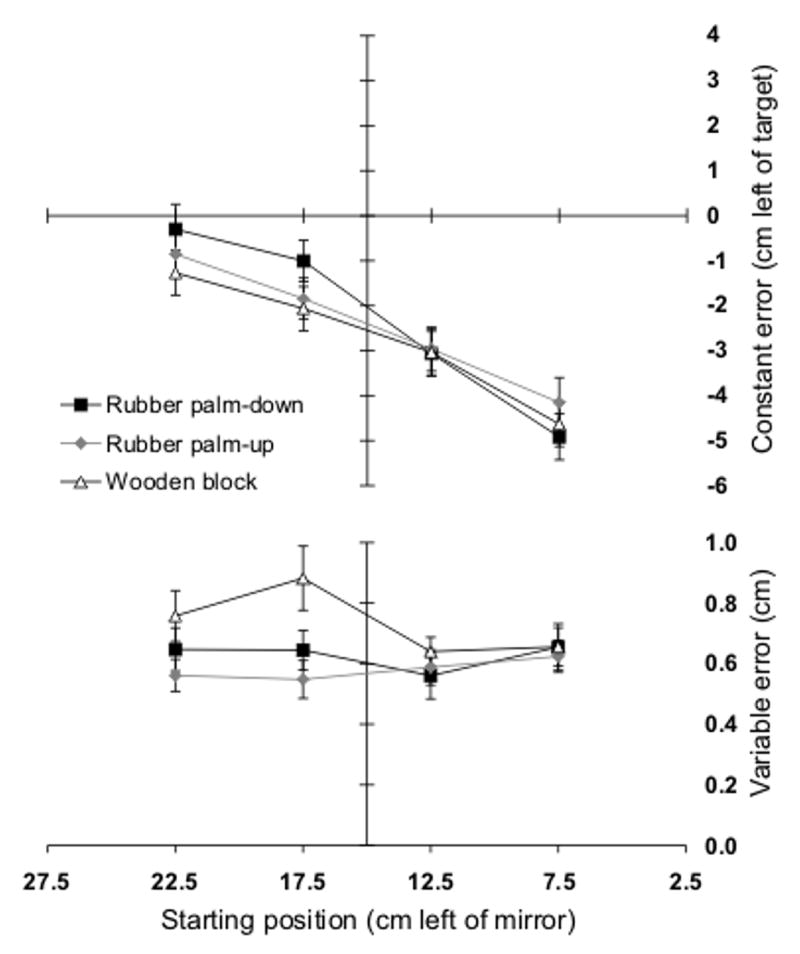
Mean (± SE) endpoint errors for reaching movements in Experiment 2. Upper panel – constant reaching error (M ± SE of the mean reaching error). Lower panel – variable reaching error (M ± SE of the standard error of the mean reaching error).
Variable error
There was a significant main effect of visual exposure condition, but no other significant terms in the ANOVA of the variable error data arising from Experiment 2. Variable error was higher in the wooden block condition (0.74 ± 0.05 cm) than in both the rubber hand palm-down (0.63 ± 0.05 cm), and the rubber hand palm-up conditions (0.58 ± 0.04 cm). Visual inspection of Figure 3 reveals that this was primarily due to increased variability in the two leftmost starting positions for this condition.
Rubber hand illusion questionnaire ratings
Of the ten questionnaire items (see Figure 4), only two showed ratings that were significantly positively correlated with the magnitude of the reaching bias across all three conditions. They were: 1) “I felt that the rubber hand (wood) in the mirror was my real left hand” (r2 = 0.16, p < .01); and 2) “I felt that the rubber hand (wood) on the table was my real right hand” (r2 = 0.14, p < .01). The mean rating for the rubber hand condition was never positive (i.e., on average, participants always disagreed with the statements), suggesting that there were no strong or consistent components of the ‘rubber hand illusion’ in the present experiments, as one might expect, since no attempts were made either to induce, or to encourage participants to experience, the rubber hand illusion.
Ratings from all ten questions across all three conditions were entered into a multiple linear regression analysis, with the percentage reaching error (i.e., the magnitude of the bias) as the dependent variable, and the 10 questionnaire ratings as predictor variables for each participant. Overall, the proportion of variance in the percentage reaching error explained by the subjective ratings was low (r2 = 0.27), and taken together, the subjective ratings did not significantly predict the reaching errors, although they did approach significance, F(10, 52) = 1.90, p = .07. Analysing each question separately with a one-way ANOVA revealed only five questions where a significant effect of visual exposure condition on the subjective ratings was found. The results of these additional statistical tests are displayed in Figure 4. Post-hoc comparisons between individual conditions for each question revealed that the majority of the significant differences between conditions arose from comparisons between the rubber hand and the wooden block conditions (5 out of 10 comparisons, p < .05). By contrast, the critical comparisons between the rubber hand and the rubber palm-up conditions revealed only one significant difference in the subjective ratings (“I felt surprised when the rubber hand in the mirror did not move when I moved my real left hand”, p < .05). Finally, only one of the comparisons between the rubber palm-up and the wooden block condition reached significance (“I felt as if both the rubber hand on the table, and the rubber hand in the mirror were my real right and left hands”, p < .05).
Discussion
The analysis of the reaching data from Experiment 2 shows that changing the posture of the visible rubber hand from an incompatible to a compatible posture (with respect to the real, reaching hand), significantly affected participants’ reaching behaviour. This result suggests that one major determinant of the rubber-hand induced visual bias of proprioception is the posture of the visible hand itself (see also Graziano et al., 2000; Pavani et al., 2000). Furthermore, it suggests that the process(es) responsible for the recalibration of proprioception by vision has (have) access, and are sensitive to, visual information concerning the posture (palm-up vs. palm-down) of the hand seen in the mirror. From previous research on human participants and macaque monkeys, we know that gross changes in the posture of a visible arm (such as turning the arm by 90 or 180 degrees so the hand points medially, laterally, or facing toward the body) have significant effects on multisensory behaviour and multisensory neural interactions. Here, we show that, similar to the changes in neural firing in macaque area 5 (Graziano et al., 2000), more subtle posture changes, such as rotating the arm around its longitudinal axis, can also induce such changes in simple reaching behaviours.
The analysis of the questionnaire data revealed only rather weak correlations between the subjective illusion measures and the reaching error data. The only questionnaire items that were significantly correlated with the reaching errors were those that related to the feeling that the rubber hand in the mirror, and on the table, were the participants’ real left and right hands, respectively. First, this result suggests that following visual exposure to the rubber hand, the subjective ‘rubber hand illusion’ was not particularly evident, at least on average in the participants tested here, according to the answers they gave (several participants did indeed feel strong illusory components of the rubber hand illusion, but as is quite common in rubber hand illusion studies, the strength of the illusory effects vary considerably across participants, e.g., see Botvinick & Cohen, 1998; Ehrsson et al., 2004). Second, this result suggests that at least part of the effect of the rubber hand seen in the mirror on subsequent reaching errors could be due to the participants feeling that the rubber hand was their right hand on the table, rather than their left hand behind the mirror. The rubber hand was seen both indirectly in the mirror, and directly, in participants’ peripheral vision. It is not clear, therefore, which of the participants’ hands was more important in generating the post-exposure effects on reaching errors.
Experiment 3
In Experiments 1 and 2, the posture of the participants’ own right and left hands was always prone (palm-down). Following the results of Experiment 2, where the posture of the rubber hand significantly influenced participants’ reaching behaviour, it is important to rule out any possible influence of the posture of the participants unseen right hand on the reaching movements made with the unseen left hand. Furthermore, it seemed important to test whether changes in the visible posture of the participants’ own right, non-reaching hand, also have a significant effect on reaching movements made with the left hand. In our third experiment, therefore, we manipulated the posture of the participants’ right hand (palm-down vs. palm-up postures), and the identity of the hand seen in the mirror (prone rubber hand vs. real hand), in a factorial manner. If the posture of the participants’ right hand has a significant effect on reaching movements regardless of whether that hand is seen in the mirror, or is hidden away behind the screen, then there must be some role for bilateral postural information in the ‘visual’ bias of reaching demonstrated in Experiments 1 and 2 (the bilateral postural hypothesis). Alternatively, if the posture of the participants’ right hand only has an effect on reaching behaviour when that hand is visible in the mirror (and not when a rubber hand is seen palm-down in the mirror during exposure to both real hand postures), then we can conclude that the visual bias of reaching is due to visual factors alone, and can discount the influence of bilateral postural information (the visual hypothesis).
Methods
Experiment 3 was identical to Experiment 1, except for the following details.
Participants
Twenty-four participants (aged 18–32, 17 female, 1 left-handed by self-report) were recruited. Six participants had already participated in Experiment 1, and four participants had participated in Experiment 2. The remaining participants had not taken part in any ‘mirror-box’ experiments previously.
Design
There were four visual exposure conditions, composed of the combination of the factors right hand posture (palm-down vs. palm-up), and visible hand (right hand viewed in the mirror vs. palm-down rubber hand viewed in the mirror). The four visual exposure conditions were therefore: 1) Real palm-down (real right hand visible in the mirror, in a palm-down posture); 2) Real palm-up (real right hand visible in the mirror, in a palm-up posture; 3) Rubber palm-down (rubber hand visible in the mirror in a palm-down posture, real right hand hidden behind the paper screen in a palm-down posture); 4) Rubber palm-up (rubber hand visible in the mirror in a palm-down posture, real right hand hidden behind the paper screen in a palm-up posture). The visual exposure conditions were presented in four blocks of 20 trials each, in a fully counterbalanced order across participants (i.e., 24 different block orders). The exposure duration was reduced to 10 seconds per trial, to keep the overall length of the experiment to around 30 minutes, while maintaining the number of trials per condition.
Results
Constant error
The reaching error data are displayed in Figure 5, and were entered into a three-way ANOVA with the variables of left hand position (7.5, 12.5, 17.5, and 22.5 cm), right hand posture (palm-down vs. palm-up), and visible hand (real right hand vs. rubber hand). The ANOVA revealed a significant main effect of left hand position, F(3, 69) = 96.94; p < .001, but no significant main effect of right hand posture, F(1, 23) = 0.06, p = .82, or of visible hand, F(1, 23) = 2.16, p = .16. Of the two-way interactions, only the interaction between left hand position and right hand posture was significant, F(3, 69) = 17.73, p < .001, revealing a stronger dependence overall on the initial position of the left hand when the real right hand was in a palm-down posture. The critical test concerned the three-way interaction between left hand position, right hand posture, and visible hand. This interaction was significant, F(3, 69) = 19.20, p < .001, revealing that the interaction between the left hand position and the right hand posture depended upon the visible hand (i.e., whether the posture of the right hand was visible or not). Two separate two-way ANOVAs were conducted on the reaching error data for the rubber hand present and rubber hand absent conditions separately. This analysis revealed that, when the participants’ real right hand was visible in the mirror, the interaction between left hand position and right hand posture was significant, F(3, 69) = 35.74, p < .001, while when the rubber hand in a palm-down posture was visible in the mirror, there was no significant interaction between left hand position and right hand posture, F(3, 69) = 0.54, n.s. In short, the posture of the participants’ right hand only influenced reaching behaviour when it was visible in the mirror, and not when it was hidden behind the screen.
Figure 5.

Mean (± SE) endpoint errors for reaching movements in Experiment 3. Upper panel – constant reaching error (M ± SE of the mean reaching error). Lower panel – variable reaching error (M ± SE of the standard error of the mean reaching error).
The mean endpoint error overall was 0.9 ± 0.1 cm to the right of the target position. The mean overall errors for each condition were as follows: Real hand palm down = −0.7 ± 0.3 cm, real hand palm-up = −0.9 ± 0.3 cm, rubber hand (real palm down) = −1.2 ± 0.3 cm, rubber hand (real palm-up) = −0.9 ± 0.3 cm. The dependence of the mean terminal reaching error on the initial left hand position was stronger in Experiment 3 than in Experiments 1 and 2. Expressed as a percentage, reaching errors were 39.7 ± 2.7% in the real hand palm-down condition, 19.5 ± 3.2% in the real hand palm-up condition, 28.0 ± 4.0% in the rubber hand (real palm-down), and 29.7 ± 3.1% in the rubber hand (real palm-up) conditions.
Variable error
The ANOVA on the variable error data revealed a significant effect of left hand position, F(3, 69) = 8.0, p < .001, but no other significant effects or interaction terms. As in Experiments 1 and 2, variable error was highest for reaches made from the leftmost starting position (7.5 cm = 0.51 ± 0.03 cm, 12.5 cm = 0.53 ± 0.03 cm, 17.5 cm = 0.56 ± 0.03 cm, 22.5 cm = 0.68 ± 0.04 cm).
Discussion
The results of Experiment 3 confirmed that there was no detectable influence of the posture (palm-down vs. palm-up) of the participants’ unseen and non-reaching right hand unless that hand was visible in the mirror. This result supports the visual hypothesis and contradicts the bilateral postural hypothesis, and suggests that the enhanced reaching biases we have observed following vision of the rubber hand are an exclusively visual phenomenon, with no significant contribution from postural information relating to the unseen right hand.
The size of the reaching bias following exposure to the rubber hand was smaller than following exposure to the real hand in Experiment 3. In Experiment 1, there was no significant difference between these two conditions. There are several possible reasons for this, the most likely being between-participants variability in the effect of the rubber hand on reaching biases. While almost every participant we have tested in a series of mirror-reaching experiments shows an effect of vision of their real hand, the effects of the rubber hand are strong, but somewhat less consistent between individuals, with some showing no effect at all, and others showing stronger effects for exposure to the rubber hand than to their real hand. It is also possible that the number of experimental conditions (four) in Experiment 3 may have decreased the effects of the rubber hand relative to the real hand, if one supposes that the illusory effects of the rubber hand may be overcome through practise. This possibility was tested explicitly with an additional ANOVA on the two rubber hand conditions data alone (collapsed), with the between-participants factor of block order (1 to 4). This revealed no significant effect or interactions involving the block order term, F(3, 44) = 1.11, p = .36, further suggesting that no order effects were present in our data.
During the peer review process, it was suggested that the differences between the rubber hand conditions and the wooden block conditions might be due to some strategic difference or differences in the orienting or allocation of attention during either the visual exposure period, or during reaching toward the target itself. While we have not yet tested this possibility explicitly, the results of Experiments 1 to 3 led us to believe that this possibility was unlikely. First, any strategic or attentional effects would have to produce results exactly in line with the effects of visual exposure duration, relative position, and hand posture that we have demonstrated in our present and in previous experiments (see also Holmes et al., 2004; Holmes & Spence, 2005). Second, such changes in the allocation of attention (for example away from the target, or away from performance of the reaching task) ought to result in significant increases in the variable reaching error between experimental conditions. As the analysis of variable error in Experiments 1 to 3 has shown, this was not the case – reaching was equally precise in all visual exposure conditions, except for in Experiment 2, where the wooden block condition showed less precise reaching (higher variable error) than the rubber hand conditions – an effect opposite in direction to that predicted by the ‘decreased attention’ or ‘distraction’ argument.
Nevertheless, the possibility remains that during the 10–12 second exposure period the presence of the rubber hand in a compatible posture with the participants’ real hand (and perhaps the experience of the mirror or rubber hand illusion itself) was in some way attentionally-capturing, and that led to differences in constant reaching error across conditions. Indeed, the ‘rubber hand illusion’ ratings were significantly higher (though on average still negating the presence of the illusions) in the compatible rubber hand conditions than the incompatible hand and wooden block control conditions, suggesting the subjective aspects of these two conditions are quite different. To attempt to control for these more subjective aspects of the experimental manipulations, we performed two further experiments in which participants were required to perform an additional task during the exposure period. In Experiment 4, we asked participants to perform two similar finger-tapping tasks during the visual exposure period, while in Experiment 5 participants were asked to perform a visual discrimination task during the exposure period.
Experiment 4
We reasoned that if the between-conditions differences in reaching behaviour in Experiments 1 to 3 were due not to the effects of visual exposure to a hand, but rather due to attentional or concentration differences, then providing an additional active task in which participants needed to pay attention to both left (unseen) and right (seen) hands simultaneously may control for such strategic differences. We also reasoned that if we could devise two similar tasks which differed in their visual-proprioceptive congruence with respect to the apparent unseen hand (i.e., the mirror-reflection), and the real unseen hand (the left hand hidden behind the mirror), then any differences in reaching behaviour must therefore be due to the visual-proprioceptive congruence, rather than to the performance of the secondary task per se.
The above reasoning requires us to assume that the two tasks are sufficiently similar to each other not to induce different task-dependent shifts of attention. We chose to use a finger-tapping task for this purpose (see also Holmes et al., 2004; Holmes & Spence, 2005). We asked participants to tap the index fingers of both hands at approximately 1 Hz, while viewing the moving index finger of the right hand in the mirror reflection. Participants were asked to tap their left and right fingers either in-phase with each other (i.e., both the left and the right fingers tapping the table at the same time), or 180 degrees out-of-phase with each other (i.e., the left finger reaching the upper limit of the tapping movement while the right finger contacts the table and vice versa). To preserve the visual-proprioceptive congruence during the in-phase tapping task, and to maximise the incongruence in the out-of-phase task, we did not use the rubber hand or wooden block as an exposure object in Experiment 4 (since it was not possible to control the finger movements of the rubber hand!). Instead, participants viewed their own hands in the mirror in three experimental conditions: In-phase movements (synchronous tapping); Out-of-phase movements (asynchronous tapping); and passive exposure (no tapping). This design allowed us to determine whether the performance of a secondary task per se was qualitatively independent from the basic visual bias of reaching effect that we are arguing for. If the performance of both finger tapping tasks influenced the reaching bias equally, and resulted in a significantly different reaching bias as compared to the passive visual exposure condition alone, then we can conclude that performing any secondary task affects reaching behaviour (the distraction hypothesis). If, by contrast, the synchronous finger tapping task induced a significantly greater reaching bias than the asynchronous task, then we can conclude that it is the congruence between the visually specified hand seen in the mirror and the actual state of the hand behind the mirror that is crucial for the enhanced reaching bias effects (the visuomotor-proprioceptive congruence hypothesis). From our previous results (Homes & Spence, 2005), and in accordance with the latter hypothesis, we also predicted that the synchronous tapping task should induce a greater reaching bias than the passive exposure task.
Methods
Participants
Twelve new participants (aged 19–40 years, seven female, all right-handed by self-report) were recruited.
Design
There were three visual exposure conditions: synchronous tapping; asynchronous tapping; and passive visual exposure.
Procedure
Experiment 4 required several minor modifications to the design and apparatus of Experiments 1 to 3. First, no rubber hand or wooden block was used. Participants placed their right hand 15 cm from the mirror, on the right hand position mark in all three visual exposure conditions. Participants were asked to tap the index fingers of their two hands at approximately 1 Hz (i.e., 1 tap per second per index finger). In the synchronous tapping condition, the apparent rhythm of tapping was therefore 1 Hz (both fingers tapping at the same time, approximately once per second), while in the asynchronous condition it appeared to be 2 Hz (a different finger tapping approximately every half a second). This apparent doubling in frequency was highlighted to participants in order to attempt to keep the number of taps per finger constant across exposure conditions. The participants did not report having any problems in producing these tapping movements. The experimenter monitored the participants and gave occasional prompts to adjust their tapping frequency, but of primary importance was the maintenance of in-phase or out-of-phase tapping in the appropriate experimental conditions. The finger tapping itself was not recorded, and served only as a secondary active task during the visual exposure period. The passive visual exposure condition was identical to the real hand (palm-down) conditions of Experiments 1 and 3.
Results
Constant error
The mean constant error across left hand position and visual exposure condition is presented in the upper panel of Figure 6, and the ANOVA statistics are presented in Table 1. The mean reaching error overall was 1.0 ± 0.3 cm to the right of the target. The three experimental conditions produced comparable overall mean reaching errors (synchronous tapping = −1.2 ± 0.5 cm, passive (no tapping) = −1.1 ± 0.4 cm, asynchronous tapping = −0.8 ± 0.4 cm). The dependence of the constant reaching error on the left hand starting position differed significantly between the visual exposure conditions. Reaches in the synchronous tapping condition were most biased (by 38.1 ± 3.2 %), followed by the passive exposure (35.5 ± 3.2 %), and least of all by the asynchronous tapping condition (24.8 ± 2.1 %). Separate ANOVAs confirmed that reaching errors differed significantly between the synchronous and the asynchronous conditions (exposure condition x left hand position interaction, F(3, 33) = 10.95, p < .001), and between the passive and the asynchronous conditions, F(3, 33) = 8.37, p < .001, but were not significantly different between the synchronous and passive conditions, F(3, 33) = 0.74, p = .54.
Figure 6.
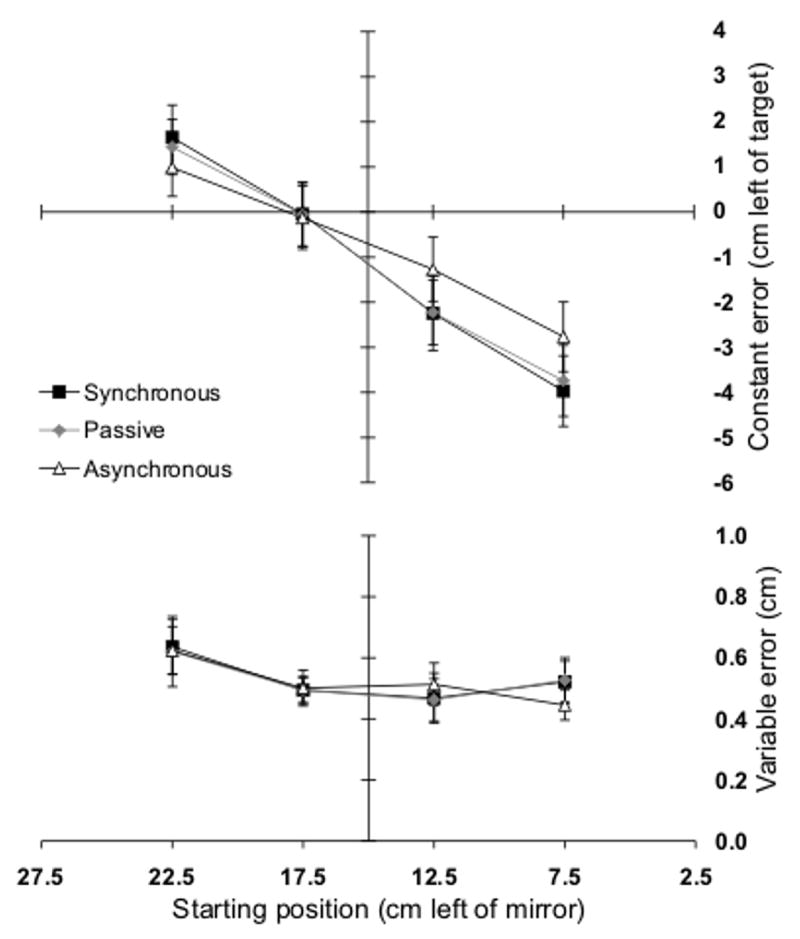
Mean (± SE) endpoint errors for reaching movements in Experiment 4. Upper panel – constant reaching error (M ± SE of the mean reaching error). Lower panel – variable reaching error (M ± SE of the standard error of the mean reaching error).
Variable error
The lower panel of Figure 6 and Table 1 show the results of the analysis of the variable error data. There were no significant main effects or interactions, though the main effect of left hand position approached significance, and this trend was due to the higher variability for reaching movements made from the leftmost starting position, consistent with the results of Experiments 1 to 3.
Discussion
The results of Experiment 4 extend and qualify those of Experiments 1 to 3 by showing that, following exposure to the visual image of one’s own hand, reaching movements are strongly influenced only if the visual information concerning the apparent left hand is congruent with proprioceptive and motor information from the real left hand hidden behind the mirror. If the visible hand in the mirror is tapping out-of-phase with the real hand behind the mirror, subsequent reaching behaviour is less biased by the conflicting visual information concerning hand position. Experiment 4 therefore suggests an important role for visuomotor-proprioceptive correlation in the generation of the bias of reaching following visual exposure to mirror-reflected hands. However, while such active synchronous bimanual tapping is sufficient to produce a strong bias of reaching, it is not necessary – reaching was biased equally during the passive visual exposure and the synchronous tapping conditions.
These results suggest that the performance of a secondary task by itself does not influence the reaching bias following visual exposure to the mirror-reflected hand, unless that task involves introducing an incongruence between what is seen in the mirror and what the hand behind the mirror is doing. These results therefore run counter to the ‘distraction’ hypothesis, and support the visuomotor-proprioceptive congruence hypothesis instead.
Before accepting this conclusion, however, it is also possible that in the asynchronous tapping condition, participants paid more attention to the proprioceptive information available from the unseen left hand, which resulted in the decreased reaching bias shown in that condition compared to the other two conditions, in which participants were in general biased more toward the visual information by such strategic or task-dependent differences. Further still, and particularly in relation to the rubber hand and wooden block conditions of Experiments 1 to 3, it is also possible that there is something specific to the two visual exposure objects (the rubber hand and the wooden block), or perhaps to the residual illusory experience of viewing rubber hands, that necessarily entails that participants devote more visual attention to the rubber hand and less to the wooden block during the exposure period. Such enhanced visual attention in the rubber hand conditions compared to the wooden block conditions might therefore lead to greater dependence on the (incorrect) visual information concerning hand position, and lesser dependence on the (correct) proprioceptive information. Providing a secondary task during the exposure period, which requires sustained visual attention and vigilance, and which is identical between visual exposure conditions, can test such a possibility. To answer the above question concerning the allocation of visual attention, we therefore performed one final experiment.
Experiment 5
If the rubber hand condition leads to an increased dependence on, or attention toward, visual information compared to the wooden block condition, then participants in the former should be faster and make fewer errors in responding selectively to a visual target during the pre-reach exposure period in comparison to the wooden block condition (the enhanced visual attention hypothesis). Alternatively, under this hypothesis, if performance on the secondary task is identical between the visual exposure conditions, then there should also be no significant difference in reaching behaviour. By contrast, if the presence of the rubber hand, compared to the wooden block, does not enhance attentional allocation to the visual information, then there should be no differences in performance on the secondary task, while the directional reaching bias should still be stronger in the rubber hand than in the wooden block condition (the automatic visual bias hypothesis).
Methods
Experiment 5 was similar to Experiments 1 to 3, except for the following details.
Participants
Twelve new participants were recruited (aged 18–19, 10 female, 1 left-handed by self-report).
Apparatus & materials
A 5 mm diameter red LED was positioned immediately behind the index finger of the rubber hand or the wooden block so that it was visible by the participants only in the mirror and not directly. The LED served both as a visual fixation point and its illumination provided a visual target stimulus. A foot pedal was placed beneath the participants’ left foot, and another foot pedal was operated by the experimenter. The LED and the foot pedals were connected via a parallel port interface box to a PC operating bespoke software programmed in the Turbo Pascal programming language.
Design
There were two visual exposure conditions: the rubber hand (palm down) condition of Experiments 1 to 3; and the wooden block condition of Experiments 1 and 2. The participants never viewed their own right hand in the mirror. The exposure duration was shortened from 12 to 10 seconds to allow a greater number of trials to be performed within a single 30 minute experimental session. There were 8 trials per visual exposure condition and left hand position (2 exposure conditions x 4 left hand positions x 8 trials = 64 trials per participant). The visual exposure conditions were run in separate blocks, with the order counterbalanced across participants. The four left hand positions were presented in a pseudorandomised order, determined by the computer prior to each block of trials.
Procedure
Each trial began when the experimenter depressed and released the pedal under his foot. Participants were instructed to fixate on the LED during the ten second pre-reach exposure period. At a random point in time between three and seven seconds after the beginning of each trial, the LED flashed either once (for 200 ms), or twice (65 ms ON, 70 ms OFF, and 65 ms ON). Participants were instructed to respond only to the double flashes, and to respond as quickly as possible by lifting their left foot off the foot pedal (i.e., a visual discrimination / Go-Nogo task). After 8.5 seconds from the beginning of the trial, a tone (400 Hz, 500 ms duration) was presented from the computer. Participants were instructed to make a single eye movement from the visual fixation LED to the target location (i.e., as seen in the mirror), and to prepare to reach. After a random delay of between 1 and 2 seconds, a second tone (1 kHz, 2000 ms in duration) sounded and acted as the ‘reach’ cue. The participants then made a single, smooth reaching movement to place their left index finger as accurately as possible on the target. The experimenter marked the reaching endpoint location (in the middle and immediately in front of the index fingertip) on millimetre-squared graph paper using a different coloured pen for each left hand position. Each participant was given 8 practice trials before the start of the experiment, during which verbal feedback about reaching accuracy was provided, and the experimenter moved the participants’ finger to the target location for additional tactile/proprioceptive feedback. No further feedback was provided.
Results
Constant error
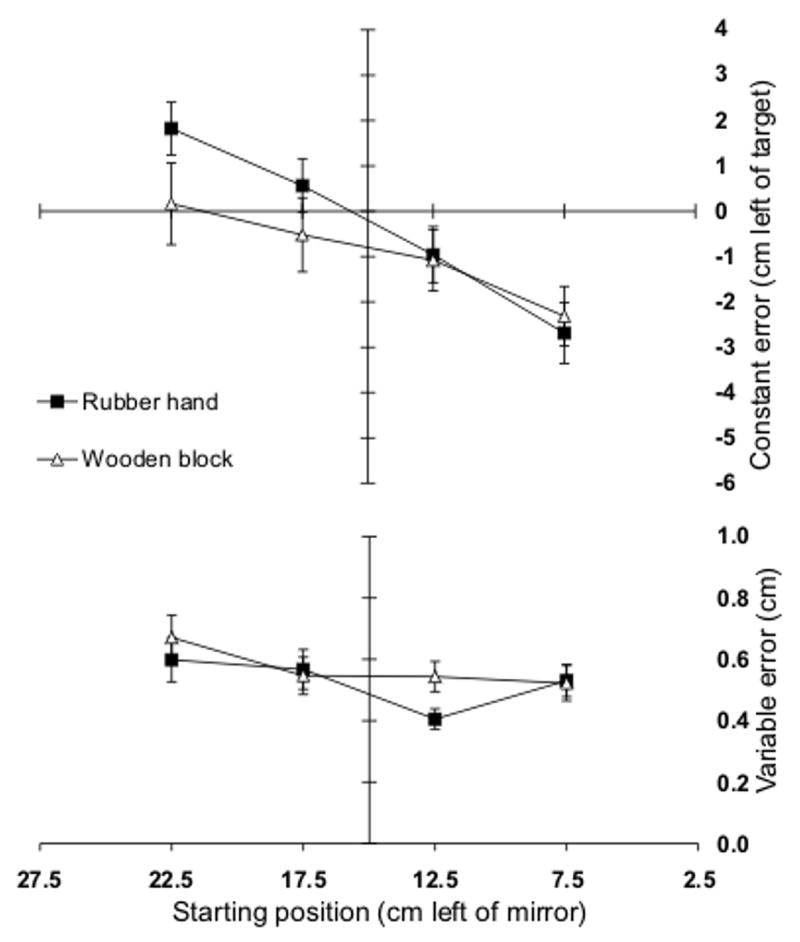
In Experiment 5, unlike Experiments 1 to 4, we also performed an analysis on errors in the front-back (y) direction. The mean terminal errors in the left-right (x) direction are displayed in Figure 7 and the relevant ANOVA statistics are presented in Table 1. Overall mean reaching error in the rubber hand condition (0.3 ± 0.4 cm rightwards, and 1.0 ± 0.3 cm beyond the target from the participants’ perspective) was slightly, but not significantly, lower than in the in the wooden block condition (0.9 ± 0.4 cm rightwards and 0.7 ± 0.4 cm beyond the target). As predicted, the dependence of the reaching errors in the x direction on the left hand position was stronger in the rubber hand condition (mean error = 30.1 ± 5.0%), than in the wooden block condition (16.0 ± 4.1%). There were no significant effects or interactions involving the visual exposure condition for errors in the y-direction.
Figure 7.
Mean (± SE) endpoint errors for reaching movements in Experiment 5. Upper panel – constant reaching error (M ± SE of the mean reaching error). Lower panel – variable reaching error (M ± SE of the standard error of the mean reaching error).
Variable error
In the left-right (x) direction, there was a significant effect of left hand position on the variable reaching error, with the leftmost starting position showing higher variable error than the other positions (7.5 cm = 0.53 ± 0.04 cm, 12.5 cm = 0.47 ± 0.03 cm, 17.5 cm = 0.56 ± 0.39 cm, 22.5 cm = 0.63 ± 0.05 cm). There were no other significant terms. For the front-back (y) direction, there were no significant terms in the ANOVA.
Visual discrimination task
Performance on the visual discrimination (Go-Nogo) task was assessed using a within-participants repeated measures analysis of variance, the reaction time and error data, broken down by left hand position and visual exposure condition, are presented in Figure 8. The mean overall reaction time was 685 ± 15 ms, and there was no significant difference between overall performance on the two exposure conditions either in reaction times (rubber hand = 684 ± 22 ms, wooden block = 685 ± 22 ms), or in the number of missed targets (rubber hand = 3.9 ± 0.9 %, wooden block = 3.1 ± 0.9 %), or false alarms (rubber hand = 0.0 ± 0.0 %, wooden block = 0.8 ± 0.6 %). The ANOVA revealed no significant terms.
Figure 8.
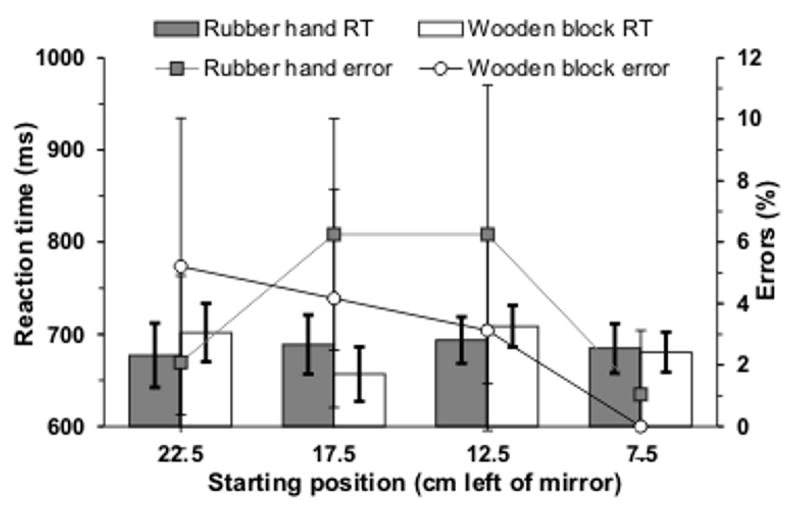
Performance on the visual discrimination / Go-Nogo task in Experiment 5. Grey columns and filled grey squares – mean (± SE) RT and percent errors (both misses and false alarms) respectively in the rubber hand condition. White columns and open circles – mean (± SE) RT and percent errors (both misses and false alarms) respectively in the wooden block condition.
General Discussion
Experiment 1 showed that 12 seconds’ visual exposure to the reflection of the participants’ own right hand induced significant biases in subsequent reaching movements of the left hand, and that this bias was equal in magnitude when vision of a rubber right hand was substituted for vision of the real hand. Visual exposure to both real and rubber hands produced more bias than visual exposure to a block of wood. Experiment 2 replicated, clarified, and extended this finding by showing that the posture of the rubber hand with respect to the participants’ real hand behind the mirror significantly influenced the reaching bias. When the rubber hand was misaligned with the participants’ real hand (i.e., when it was placed palm-up), there was no difference in reaching behaviour following exposure to the rubber hand or to the block of wood, while a rubber hand aligned compatibly with the participants’ hand induced significantly more bias. The analysis of the questionnaire data revealed only two subjective aspects of the experience of the rubber-hand-in-the-mirror situation that accounted for a significant proportion of the variance in the reaching data above the 5% significance level. These factors related to the subjective feelings that the rubber hands in the mirror or on the table were one’s real left or right hand respectively. Experiment 3 showed that manipulating the posture of the participants’ non-reaching hand only affected the behaviour of the reaching hand when the non-reaching hand was visible in the mirror (i.e., supporting the ‘visual’ hypothesis), and had no effect when an artificial hand was visible in a congruent posture in the mirror (i.e., against the ‘bilateral proprioceptive’ hypothesis). Additionally, we showed that performance of an additional task during the pre-reach exposure period only affected the reaching bias when the task altered the visuomotor-proprioceptive correlation between the apparent (mirror) and real (hidden) hands (Experiment 4), and not when the secondary task concerned a visual discrimination / Go-Nogo task (Experiment 5).
Throughout the five experiments reported here, there were no effects of block order on the size or direction of the reaching movements, and there were no obvious effects of trial-by-trial practice in Experiment 5 (data refereed but not reported here) suggesting that whatever process(es) lead to the reaching biases, these are not dependent on practice on or experience of the task, yet they are highly replicable across experiments, participants, blocks, and trials. Furthermore, and perhaps surprisingly, there were no significant effects of gender or skin colour on the interaction between hand position and visual exposure condition (again, data refereed but not reported here). This latter result may be surprising given that the rubber hand we used was similar to that of a small Caucasian female’s hand, yet the participants varied widely in height and skin colour, though the majority were female (61 of 87, 70%). The lack of such participant-specific effects, however, underlines our assertion that whatever process is responsible for the reported reaching bias, it has access primarily only to approximate visual information concerning the location of the hand, and is less sensitive to fine visual details of any particular visible hand.
The finding that the posture of the rubber hand was the crucial factor for increasing the bias of reaching with respect to the wooden block control condition is compatible with several other recent findings. First, Graziano et al. (2000) found that about a third of cells in Macaque monkey area 5 showing tonic activity related to the positions of the right and/or left arms were also sensitive to the position of a stuffed monkey arm placed in view and near the animal’s real arm (which was placed out-of-sight). More importantly, certain cells were also sensitive to the orientation of the hand and the identity of the hand – the position and posture of a fake right hand modulated the firing of area 5 cells that preferred right arm postures more than for those cells with a preference for left arm postures.
Arm-posture dependent changes in multisensory processing following exposure to misaligned or artificial hands have also been demonstrated in brain-damaged patients (Farnè et al., 2000; Rorden et al., 1999) and normal human participants (Austen et al., 2004; Pavani et al., 2000). Furthermore, the influence of the posture of the rubber hand, and the presence of synchronous versus asynchronous multisensory stimulation of the hand has been shown to modulate activity in brain areas closely related to the multisensory representation of the body (Ehrsson et al., 2004; see also Lloyd, Shore, Spence, & Calvert, 2003). Ehrsson and colleagues found that activity in the premotor cortex was most closely correlated with the experience of the rubber hand illusion under the combination of synchronous visual-tactile stimulation, and a compatible posture of the rubber hand with respect to the real hand. Activity in the posterior parietal cortex, by contrast, was enhanced both by synchronous multisensory stimulation and by the compatible orientation of the artificial hand, and was less correlated with the rubber hand illusion itself.
In conjunction with previous results from our laboratory (Holmes & Spence, 2005; Holmes et al., 2004), the present results imply that passive visual exposure to artificial hands in a congruent posture induces a visual recalibration of proprioception of the participant’s real hand position toward the position of the artificial hand (in the present experiments, toward the ‘virtual’ position of the rubber hand). It is also possible, as suggested by one of our reviewers, that the effects of the hand position-and posture-dependent manipulations we have reported here might be due to an alteration of visual-spatial processing rather than of the felt azimuthal location of the reaching limb. While we cannot definitively rule out this possibility from the present data alone, a recalibration of visual space seems to us to be a far less likely explanation for our results than a recalibration of proprioceptive information, particularly since the participants’ gaze direction, the visual location of the exposure object, and the target location were constant and not manipulated across experimental conditions and experiments. Proprioceptive signals relating to hand position are known to decay in the absence of visual information within a very short timescale of only about 15 seconds, similar to the exposure durations used here (Wann & Ibrahim, 1992).
Effects such as those demonstrated in the current research probably depend at least partly on multisensory processes integrating vision and proprioception in the posterior parietal cortex, which forms part of the reaching motor circuit (e.g., the medial intraparietal cortex or parietal reach region, and the premotor cortex, Ehrsson et al., 2004; Connolly, Andersen, & Goodale, 2003; see also Lloyd et al., 2003). We are currently using transcranial magnetic stimulation to test the hypothesis that the superior parietal lobule (areas 5 and 7 of the posterior parietal cortex) plays a role in the visual guidance of reaching movements in the mirror illusion experiment. Of particular interest to us will be to examine kinematic aspects of the reaching movements using a three-dimensional position tracking system, in order to determine if reaching movements starting from a position in which vision and proprioception are in conflict are different from those in the absence of conflict, and whether such differences evolve over the course of the reaching movement. Several of the participants in the current experiments commented, for instance, that the initiation of reaching movements felt more difficult after exposure to the rubber hand, and that the rubber hand ‘paralysed’ them in some strange manner. Such strange sensations of ownership and agency have been reported in similar experiments before (e.g., see Jackson & Zangwill, 1952; Nielsen, 1963; Sullivan, 1969).
Our results further suggest that the process of visual recalibration of proprioception by artificial hands can, to a certain extent, be dissociated from the experience of the rubber hand illusion and the ‘ownership’ of sensations applied to the rubber hand. More importantly, reaching biases following exposure to rubber hands occur somewhat ‘automatically,’ in the absence of any conscious attempt to induce (on the part of the experimenter) or to experience (on the part of the participant) any subjective aspects of the ‘rubber hand illusion.’ Passive visual exposure alone induces a significant reaching bias, without any strong accompanying illusory sensations of ownership of the rubber hand (see also Pavani et al., 2000, where participants also, on average, always negated the presence of the rubber hand illusion). This finding suggests that reaching or proprioceptive biases are not reliable objective measures of the rubber hand illusion itself, and that proprioceptive recalibration may in fact be a necessary pre-requisite for the rubber hand illusion to occur, or else may be causally unrelated to such illusory experiences of bodily ownership.
Conclusions
Our brains compute the position of our hands based on a weighted sum of visual and proprioceptive information (Haggard, Newman, Blundell, & Andrew, 2000; van Beers, Wolpert, & Haggard, 2002). In the absence of visual information, proprioception is relied upon to guide the trajectory of subsequent reaching movements. When visual information concerning the apparent position of the hand is provided by a mirror reflection of the other hand, the brain cannot help but integrate that information with the available proprioceptive information. We have shown here that even the somewhat rudimentary visual information provided by passive vision of an artificial hand, placed in a plausible, anatomical alignment with the participant’s real hand can bias subsequent reaching movements as much as vision of the real hand itself, without inducing any strong illusory sensations of ownership of the artificial hand. We suggest that those areas of the brain responsible for integrating visual and proprioceptive information only have access to very basic visual information concerning body parts such as the hand. This visual information may specify only the approximate shape, size, and position of the hand, yet may still be sufficient to begin the process of recalibrating the felt position of the hand toward the visually-specified apparent position.
Footnotes
Authors Note
Nicholas P. Holmes was supported by a Wellcome Prize Studentship (number 065696/Z/01/A) from The Wellcome Trust.
References
- Altschuler EL, Wisdom SB, Stone L, Foster C, Galasko D, Llewellyn DM, Ramachandran VS. Rehabilitation of hemiparesis after stroke with a mirror. Lancet. 1999;353:2035–2036. doi: 10.1016/s0140-6736(99)00920-4. [DOI] [PubMed] [Google Scholar]
- Armel KC, Ramachandran VS. Projecting sensations to external objects: Evidence from skin conductance response. Proceedings of the Royal Society of London, B: Biological Sciences. 2003;270:1499–1506. doi: 10.1098/rspb.2003.2364. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Austen EL, Soto-Faraco S, Enns JT, Kingstone AF. Mislocalizations of touch to a fake hand. Cognitive, Affective, and Behavioral Neuroscience. 2004;4:170–181. doi: 10.3758/cabn.4.2.170. [DOI] [PubMed] [Google Scholar]
- Bédard P, Proteau L. On the role of static and dynamic visual afferent information in goal-directed aiming movements. Experimental Brain Research. 2001;138:419–431. doi: 10.1007/s002210100739. [DOI] [PubMed] [Google Scholar]
- Botvinick MM, Cohen JD. Rubber hands 'feel' touch that eyes see. Nature. 1998;391:756. doi: 10.1038/35784. [DOI] [PubMed] [Google Scholar]
- Burnett CT. Studies in the influence of abnormal position upon the motor impulse. Psychological Review. 1904;11:370–394. [Google Scholar]
- Connolly JD, Andersen RA, Goodale MA. FMRI evidence for a ‘parietal reach region’ in the human brain. Experimental Brain Research. 2003;153:140–145. doi: 10.1007/s00221-003-1587-1. [DOI] [PubMed] [Google Scholar]
- Desmurget M, Rossetti YKK, Jordan M, Meckler C, Prablanc C. Viewing the hand prior to movement improves accuracy of pointing performed toward the unseen contralateral hand. Experimental Brain Research. 1997;115:180–186. doi: 10.1007/pl00005680. [DOI] [PubMed] [Google Scholar]
- Ehrsson HH, Spence C, Passingham RE. That's my hand! Activity in premotor cortex reflects feeling of ownership of a limb. Science. 2004;305:875–877. doi: 10.1126/science.1097011. [DOI] [PubMed] [Google Scholar]
- Farnè A, Pavani F, Meneghello F, Làdavas E. Left tactile extinction following visual stimulation of a rubber hand. Brain. 2000;123:2350–2360. doi: 10.1093/brain/123.11.2350. [DOI] [PubMed] [Google Scholar]
- Franz EA, Packman T. Fooling the brain into thinking it sees both hands moving enhances bimanual spatial coupling. Experimental Brain Research. 2004;157:174–180. doi: 10.1007/s00221-004-1831-3. [DOI] [PubMed] [Google Scholar]
- Ghilardi MF, Gordon J, Ghez C. Learning a visuomotor transformation in a local area of workspace produces directional biases in other areas. Journal of Neurophysiology. 1995;73:2535–2539. doi: 10.1152/jn.1995.73.6.2535. [DOI] [PubMed] [Google Scholar]
- Graziano MSA, Cooke DF, Taylor CSR. Coding the location of the arm by sight. Science. 2000;290:1782–1786. doi: 10.1126/science.290.5497.1782. [DOI] [PubMed] [Google Scholar]
- Haggard P, Newman CS, Blundell J, Andrew H. The perceived position of the hand in space. Perception & Psychophysics. 2000;62:363–377. doi: 10.3758/bf03205556. [DOI] [PubMed] [Google Scholar]
- Holmes NP, Crozier G, Spence C. When mirrors lie: "Visual capture" of arm position impairs reaching performance. Cognitive, Affective, and Behavioral Neuroscience. 2004;4:193–200. doi: 10.3758/cabn.4.2.193. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Holmes NP, Spence C. Visual bias of unseen hand position with a mirror: Spatial and temporal factors. Experimental Brain Research. 2005 doi: 10.1007/s00221-005-2389-4. DOI:10.1007/s00221–005–2389–4. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Jackson CV, Zangwill OL. Experimental finger dyspraxia. Quarterly Journal of Experimental Psychology. 1952;4:1–10. [Google Scholar]
- Kennett S, Taylor-Clarke M, Haggard P. Noninformative vision improves the spatial resolution of touch in humans. Current Biology. 2001;11:1188–1191. doi: 10.1016/s0960-9822(01)00327-x. [DOI] [PubMed] [Google Scholar]
- Lloyd DM, Shore DI, Spence C, Calvert GA. Multisensory representation of limb position in human premotor cortex. Nature Neuroscience. 2003;6:17–18. doi: 10.1038/nn991. [DOI] [PubMed] [Google Scholar]
- Newport R, Hindle JV, Jackson SR. Links between vision and somatosensation: Vision can improve the felt position of the unseen hand. Current Biology. 2001;11:975–980. doi: 10.1016/s0960-9822(01)00266-4. [DOI] [PubMed] [Google Scholar]
- Niebauer CL, Aselage J, Schutte C. Hemispheric interaction and consciousness: Degree of handedness predicts the intensity of a sensory illusion. Laterality. 2002;7:85–96. doi: 10.1080/13576500143000159. [DOI] [PubMed] [Google Scholar]
- Nielsen TI. Volition: A new experimental approach. Scandinavian Journal of Psychology. 1963;4:225–230. [Google Scholar]
- Pavani F, Spence C, Driver J. Visual capture of touch: Out-of-the-body experiences with rubber gloves. Psychological Science. 2000;11:353–359. doi: 10.1111/1467-9280.00270. [DOI] [PubMed] [Google Scholar]
- Peled A, Pressman A, Geva AB, Modai I. Somatosensory evoked potentials during a rubber-hand illusion in schizophrenia. Schizophrenia Research. 2003;64:157–163. doi: 10.1016/s0920-9964(03)00057-4. [DOI] [PubMed] [Google Scholar]
- Peled A, Ritsner M, Hirschmann S, Geva AB, Modai I. Touch feel illusion in schizophrenic patients. Biological Psychiatry. 2000;48:1105–1108. doi: 10.1016/s0006-3223(00)00947-1. [DOI] [PubMed] [Google Scholar]
- Ramachandran VS, Rogers-Ramachandran D. Synaesthesia in phantom limbs induced with mirrors. Proceedings of the Royal Society of London, B: Biological Sciences. 1996;263:377–386. doi: 10.1098/rspb.1996.0058. [DOI] [PubMed] [Google Scholar]
- Ramachandran VS, Rogers-Ramachandran D, Cobb S. Touching the phantom limb. Nature. 1995;377:489–490. doi: 10.1038/377489a0. [DOI] [PubMed] [Google Scholar]
- Ro T, Wallace R, Hagedorn JC, Farnè A, Pienkos E. Visual enhancing of tactile perception in posterior parietal cortex. Journal of Cognitive Neuroscience. 2004;16:24–30. doi: 10.1162/089892904322755520. [DOI] [PubMed] [Google Scholar]
- Rorden CR, Heutink J, Greenfield E, Robertson IH. When a rubber hand 'feels' what the real hand cannot. NeuroReport. 1999;10:135–138. doi: 10.1097/00001756-199901180-00025. [DOI] [PubMed] [Google Scholar]
- Rossetti YKK, Desmurget M, Prablanc C. Vectorial coding of movement: Vision, proprioception, or both? Journal of Neurophysiology. 1995;74:457–463. doi: 10.1152/jn.1995.74.1.457. [DOI] [PubMed] [Google Scholar]
- Rossetti YKK, Stelmach GE, Desmurget M, Prablanc C, Jeannerod M. The effect of viewing the static hand prior to movement onset on pointing kinematics and variability. Experimental Brain Research. 1994;101:323–330. doi: 10.1007/BF00228753. [DOI] [PubMed] [Google Scholar]
- Sarlegna F, Blouin J, Bresciani J, Bourdin C, Vercher J, Gauthier GM. Target and hand position information in the online control of goal-directed arm movements. Experimental Brain Research. 2004;151:524–535. doi: 10.1007/s00221-003-1504-7. [DOI] [PubMed] [Google Scholar]
- Sathian K, Greenspan AI, Wolf SL. Doing it with mirrors: A case study of a novel approach to neurorehabilitation. Neurorehabilitation and Neural Repair. 2000;14:73–76. doi: 10.1177/154596830001400109. [DOI] [PubMed] [Google Scholar]
- Sullivan R. Experimentally induced somatognosia. Archives of General Psychiatry. 1969;20:71–77. doi: 10.1001/archpsyc.1969.01740130073006. [DOI] [PubMed] [Google Scholar]
- Tastevin J. En partent de l'experience d'Aristotle: Les déplacements artificiels des parties du corps ne sont pas suivis par le sentiment de ces parties ni pas les sensations qu'on peut y produire. [Starting from Aristotle’s experiment: Artificial displacements of parts of the body are not followed by feelings in these parts or by the sensations which can be produced there] L'Encephale. 1937;1:57–84. 140–158. [Google Scholar]
- Tsakiris M, Haggard P. The rubber hand illusion revisited: Visuotactile integration and self-attribution. Journal of Experimental Psychology: Human Perception and Performance. 2005;31:80–91. doi: 10.1037/0096-1523.31.1.80. [DOI] [PubMed] [Google Scholar]
- van Beers RJ, Wolpert DM, Haggard P. When feeling is more important than seeing in sensorimotor adaptation. Current Biology. 2002;12:834–837. doi: 10.1016/s0960-9822(02)00836-9. [DOI] [PubMed] [Google Scholar]
- Wann JP, Ibrahim SF. Does limb proprioception drift? Experimental Brain Research. 1992;91:162–166. doi: 10.1007/BF00230024. [DOI] [PubMed] [Google Scholar]