

Abstract
Biomimetics, a name coined by Otto Schmitt in the 1950s for the transfer of ideas and analogues from biology to technology, has produced some significant and successful devices and concepts in the past 50 years, but is still empirical. We show that TRIZ, the Russian system of problem solving, can be adapted to illuminate and manipulate this process of transfer. Analysis using TRIZ shows that there is only 12% similarity between biology and technology in the principles which solutions to problems illustrate, and while technology solves problems largely by manipulating usage of energy, biology uses information and structure, two factors largely ignored by technology.
Keywords: biomimetics, bionics, TRIZ, technology transfer, conflict, inventive principle
1. Introduction
Otto Schmitt was a polymath, whose doctoral research was an attempt to produce a physical device that explicitly mimicked the electrical action of a nerve. By 1957, he had come to perceive what he would later label biomimetics as a disregarded—but highly significant—converse of the standard view of biophysics:
Biophysics is not so much a subject matter as it is a point of view. It is an approach to problems of biological science utilizing the theory and technology of the physical sciences. Conversely, biophysics is also a biologist's approach to problems of physical science and engineering, although this aspect has largely been neglected.
The word bionics was coined by Jack Steele of the US Air Force in 1960 at a meeting at Wright-Patterson Air Force Base in Dayton, Ohio. He defined it as the science of systems which have some function copied from nature, or which represent characteristics of natural systems or their analogues. At another meeting at Dayton in 1963, Schmitt said
Let us consider what bionics has come to mean operationally and what it or some word like it (I prefer biomimetics) ought to mean in order to make good use of the technical skills of scientists specializing, or rather, I should say, despecializing into this area of research. Presumably our common interest is in examining biological phenomenology in the hope of gaining insight and inspiration for developing physical or composite bio-physical systems in the image of life.
Later, Schmitt used the word biomimetics in the title of a paper (Schmitt 1969); the word made its first public appearance in Webster's Dictionary in 1974, accompanied by the following definition:
The study of the formation, structure, or function of biologically produced substances and materials (as enzymes or silk) and biological mechanisms and processes (as protein synthesis or photosynthesis) especially for the purpose of synthesizing similar products by artificial mechanisms which mimic natural ones.
Biomimetics (which we here mean to be synonymous with ‘biomimesis’, ‘biomimicry’, ‘bionics’, ‘biognosis’, ‘biologically inspired design’ and similar words and phrases implying copying or adaptation or derivation from biology) is thus a relatively young study embracing the practical use of mechanisms and functions of biological science in engineering, design, chemistry, electronics, and so on. However, people have looked to nature for inspiration for more than 3000 years (since the Chinese first tried to make an artificial silk). Historically, we have:
Leonardo da Vinci studied birds flying and designed some machines, but never made any.
In Swift's satire of the Royal Society:
There was a most ingenious architect who had contrived a new method for building houses, by beginning at the roof, and working downwards to the foundation; which he justified to me by the like practice of those two prudent insects the bee and the spider.
Henry Mitchell of the American Coast Survey invented a pile
so cut that the lower portion of it, of a space of six or eight feet, presents the appearance of a number of inverted frustums of cones, placed one above the other.
When this sways under the action of waves it sinks deeper into the sea bed, a design
borrowed from nature …certain seed vessels, by virtue of their forms, bury themselves in the earth when agitated by wind or water.
(from H. D. Thoreau's Journal (1859); thanks to Prof. Kalman Schulgasser for the information)
Pettigrew had some pithy comments to make about people's failure to produce a usable flying machine, saying that
It has been cultivated, on the one hand, by profound thinkers, especially mathematicians, who have worked out innumerable theorems, but have never submitted them to the test of experiment; and on the other, by uneducated charlatans who, despising the abstractions of science, have made the most ridiculous attempts at a practical solution to the problem.
Interestingly, he also pointed out that the invention of the hot air and hydrogen balloons had misled research, causing people
to look for a solution… by the aid of a machine lighter than air, and which has no analogue in nature.
(Pettigrew 1873, p. 209)
Pettigrew thus missed the analogy of a balloon in air and a neutrally buoyant organism in water.
Clement Ader designed and built several steam-powered aircraft (Eole) using the wing design of a bat. He attained a flight of 300 m or so, but could not gain control with such a compliant wing (Coineau & Kresling 1987).
The following list is by no means complete; the Internet is a large and unreliable source of further examples. We have chosen examples which are contentious, interesting or iconic.
The stable wing designed by Ignaz and Igo Etrich in 1904 was derived from the large (15 cm span) winged seed of Alsomitra macrocarpa, a liana which grows on islands in the Pacific (Coineau & Kresling 1987). The seed with its outgrowths functions as a flying wing and can glide for significant distances.
Velcro is an invention derived from the action of the hooked seeds of the burdock plant which caught in the coat of George de Mestral's dog when they were out on a walk (Velcro 1955). The first use he wanted to put the concept to was a novel type of zip fastener.
Jeronimidis analysed the main toughening mechanism of wood in tension and decided it was due to the orientation of cellulose in the walls of the wood cells, which is commonly at to the long axis of the cells in softwoods. He made assemblages of tubes with various orientations of glass fibre in a resin matrix and showed that this indeed produces the toughest material (Gordon & Jeronimidis 1980). In another series of tests he showed that this structure is, weight-for-weight, about five times tougher than anything else in impact (Chaplin et al. 1983).
The observation that the leaves of the lotus are always clean, despite growing in muddy and stagnant water, led to the production of Lotusan, a paint for self-cleaning surfaces (Barthlott & Neinhuis 1997). Similar surface textures are used to repel dirt or make it easily removed (e.g. a honey spoon which drains completely), and have been observed in many other plants and in other systems, such as insect wings (Wagner et al. 1996). The same surface properties are now being developed on metals.
Antireflective surfaces have been discovered several times on insect eyes (Bernhard et al. 1965; Parker et al. 1998), wings of insects (Stoddart et al. 2006) and leaves of plants in the understorey of tropical forests (Lee 1986). This has now been manufactured on polythene sheet, which is adhered to the glass surface of a solar panel (using glue which matches the refractive indices), resulting in a 10% improvement in capture of light.
Soft Kill Option (a finite-element model by Mattheck (1989) developed from his studies on stress-relieving shapes in the adaptive growth of trees) was used to design the chassis of the DaimlerChrysler Bionic Car based on the shape of the boxfish (Ostracion meleagris), which has the unusual combination of a large volume within a small wheelbase (Anon 2005). It is possible that this design is based on original observations by Daniel Weihs and others (Bartol et al. 2005), but this is not acknowledged by DaimlerChrysler in their promotional literature.
Dry adhesive tape has been made using the adhesive mechanism of gecko feet. A single gecko foot hair (seta) adheres equally well to hydrophobic and hydrophilic surfaces, generating van der Waals forces of 10 MPa, showing that the adhesive properties of gecko setae are a result of the size and shape of the tips, which conform to the local surface topography, and are not strongly affected by surface chemistry (Autumn et al. 2001; Geim et al. 2003).
A micro-air vehicle has been made with oscillating wings inspired (in part) by birds (Jones & Platzer 2002), especially those flying low over water making use of the ground effect. This is particularly interesting because it also illustrates the limitations which observation of nature can impose. Although the Jones & Platzer design uses up-and-down motion of wings, it is technically plunging rather than flapping since the whole aerofoil is moved up and down by the same amount along its span (Lai & Platzer 2001), which is anatomically impossible for an animal which has the wing attached to the body at one end. The plunging aerofoils have a changing angle of incidence since they move on an arc, but their (summed) net angle is zero. They therefore provide mainly thrust; lift and control are provided by a separate fixed wing. Yet the design is inspired by nature. The problem has always been stated as ‘how can we implement flapping flight?’ rather than ‘how can we oscillate one or more aerofoils so as to produce thrust?’ The effect is identical if the aerofoils are mounted vertically rather than horizontally, which could be a mechanism which seals use to generate thrust with their hind limbs.
Robotic control systems inspired by natural neural circuits, especially those of insects, prove to be exceptionally robust and simple (Reeve & Webb 2001).
By clever design of its ‘ear’ drums and associated nervous system, a fly (Ormia ochracea) increases the time difference between the two ears in response to a noise and can detect the source of the sound highly accurately (Mason et al. 2001).
Camouflage, especially during the Second World War, was biomimetic under the direction of Hugh Cott. More recently, motion camouflage has been described and will be implemented (Anderson & McOwan 2003). An example is given by the dragonfly which, as it approaches its prey on the wing, endeavours to occupy the same part of the prey's visual field, thus appearing not to move and therefore not to be a threat. It is difficult to detect an object moving towards you if all it does is increase in size.
The surfaces of earth-moving machinery (ploughs, bulldozers) can be made more effective when modelled on surfaces of soil-moving animals which have geometrically optimized ridges and bumps. This reduces the degree of interaction of the earth-moving surface with the soil, reducing friction and improving separation of the soil from the plough (Li et al. 2004).
The vortices induced by ridges on shark skin can cut down friction drag significantly. This is being used on the hulls of sailing boats (and outlawed in competition, so it is obviously very successful!) and the lining of pipes carrying liquid. The same system has been used on aircraft, showing drag reduction of 5–10% (Bechert et al. 2000). (See also swimwear below.)
The divided wing tip of birds with wings of low aspect ratio (buzzard, vulture, eagle) reduces tip drag (Tucker 1993) and can be abstracted into a loop that reduces drag in aircraft wings and underwater propellers (Stache 2004).
The fins of fishes are much more efficient propulsors than conventional propellers and have been implemented (as ‘nektors’) in small submersibles by Nekton, Inc. These vessels, with four nektors, have all six degrees of freedom of movement. An early example of the concept is the Twiddlefish (McHenry et al. 1995).
The body shape of a penguin has extremely low drag and has been used to design low-drag dirigibles (Bannasch 1993).
The bumpy surface of the elytra of beetles from the Namibian desert encourages the formation of droplets of water from damp air at the dew point (Parker & Lawrence 2001). This mechanism is being implemented by QinetiQ.
Many architects use biology as an inspiration. Some, such as Frei Otto, make direct and useful reference and so produce efficient lightweight tensile structures taking direct inspiration from spider webs (Coineau & Kresling 1987). Architects commonly use biology as a library of shapes. As decoration (Art Nouveau, Jungendstil, and the like), this is obviously acceptable, but the client still has to be able to afford it. Unfortunately, biology is also used ineptly as a structural rationale, and Frei Otto was as guilty of this as anyone, with his notorious ‘pneu’ studies, where he claimed that all biology is the product of inflatable structures, totally missing the point that the shape of a soap bubble is necessitated by the inability of a soap film to resist shear; therefore, the skin of an object shaped like a soap bubble will also be shear-free and thus lighter and more efficient.
Some systems may be apocryphal in their derivation, have the status of urban myth, or be the product of over-enthusiasm:
It is uncertain whether Joseph Paxton got his ideas for the Crystal Palace from the leaves of a giant water lily: he used a leaf as an illustration during a talk at the Royal Society of the Arts in London, showing how to support a roof-like structure, and the myth may have grown out of over-enthusiastic reportage (Vogel 1998). Certainly there is little similarity between the design of the water lily leaf (which uses support of radial tapering beams) and the design of the roof of the Crystal Palace (which, with its corrugations, more resembles other types of leaf, such as beech or hornbeam).
There are stories that Eiffel's tower was based on the structure of trabecular struts in the head of the human femur, or the taper of a tulip stem. In fact, it was constructed to resist wind loading, a topic in which Eiffel was an early expert. In the construction of the tower, the curve of the base pylons was calculated, so that the wind loads were resisted related to their force and the moment exerted with height. Thus, even in the strongest winds the tower sways no more than 12 cm.
Swim-suits whose surface structure is modelled on sharkskin (see above) do not reduce drag significantly when their performance is examined objectively (Stager et al. 2000). They probably support the muscles to some extent.
Polar bears are supposed to have a dark skin to protect them from UV, but have hairs that transmit radiation down to the skin. However, it appears impossible for the hairs to act as light guides since they are largely hollow, and the air spaces which will reflect and disperse radiation rather than transmitting it. There is no referred study published about this supposed phenomenon.
2. A framework for biomimetics
No general approach has been developed for biomimetics, although a number of people are currently developing methods for searching biological literature for functional analogies to implement. We think that this is only part of the required framework. Although it is well known that design and engineering are rendered much easier with use of theory, in biomimetics, every time we need to design a new technical system we have to start afresh, trying and testing various biological systems as potential prototypes and striving to make some adapted engineered version of the biomimetic device which we are trying to create. Additionally, the transfer of a concept or mechanism from living to non-living systems is not trivial. A simple and direct replica of the biological prototype is rarely successful, even if it is possible with current technology. Some form or procedure of interpretation or translation from biology to technology is required. More often than not, the technical abstraction is possible only because a biologist has pointed out an interesting or unusual phenomenon and has uncovered the general principles behind its functioning (e.g. the self-cleaning lotus effect). Only then does the biological principle become available outside biology for biomimetic use. The result is often unexpected (e.g. self-cleaning buildings) and the final product—in this instance, a paint containing particles—seldom resembles the biological prototype. We present here a logical framework that we believe exposes some important underlying patterns.
Approximately 50 years ago in Russia, a particularly successful problem-solving system began to be developed. It was named TRIZ, the acronym of Teorija Reshenija Izobretatel'skih Zadach (loosely translated as ‘Theory of Inventive Problem Solving’).TRIZ is well known for its successful transfer of various inventions and solutions from one field of engineering to another. Since the main thrust of biomimetics is also to transfer functions, mechanisms and principles from one field to another, TRIZ seems the ideal starting point (Bogatyrev 2000; Vincent & Mann 2002). We also use TRIZ as a functional summary and definition of engineering methodology, a novel use of the system. We know of no other strategy or system which is so powerful and so general. Since TRIZ is not very well known to Western science and technology, a short description is necessary, outlining its normal use by problem solvers.
TRIZ is a collection of tools and techniques, developed by Genrich Altshuller and Rafik Shapiro (Altshuller 1999) that ensures accurate definition of a problem at a functional level and then provides strong indicators towards successful and often highly innovative solutions. At the definition stage, a number of techniques are used to ensure that the problem is placed properly within its context (simply changing the context may solve the problem…) and the available resources listed. In the most popular (though probably not the best) technique for solution, the problem is then characterized by a pair of opposing or conflicting characteristics (typically ‘what do I want’ and ‘what is stopping me getting it’, but Hegel's thesis and antithesis will do as well, suggesting that it is a form of dialectic process), which can be compared with pairs of characteristics derived from other, solved, problems derived from the examination and analysis of more than three million significant patents.
In order to standardize the process, each of the conflicting characteristics has to be assigned to a term contained in a definitive list of 39 contradiction features (Domb 1998; Altshuller 1999). The solved problems whose conflict pairs match most closely those of the problem under examination are then used as analogues1 of the solution that is being sought, and thus provide the synthesis to complete the dialectic of thesis–antithesis. In order to make this matching process easier, the inventive principles derived from existing patents are entered into a matrix with the antithetic features along the top, and the desired features arranged along the vertical axis. This contradiction matrix then serves as a look-up table. Hence, the problem is resolved. Crucially, this method allows the problem, and its derived analogue(s), to be separated from their immediate context, so that solutions to any problem can be drawn from a very wide range of science and technology. Hence, TRIZ should become a suitable vehicle for identifying functions and transferring them from nature to engineering. In passing, one of the characteristics of this method, which points to something much deeper, presumably soluble only by some philosophical argument, is that the more apparently incompatible the contradiction features are, the stronger the solution which will be revealed. This has to mean that the nature of the problem is better defined, or perhaps even identified, by a thesis–antithesis pair that is as conflicting as possible. Therefore, a robust definition assists the identification of a more robust synthesis to the dialectic. That such a system of definition and solution of a problem should emerge from Russia is not surprising when it is realized that similar philosophical arguments and teaching are (or were) given to Russian children while still in school.
3. Solving problems in biology and technology
The nature and organization of biology and engineering are very different: organisms develop through a process of evolution and natural selection; biology is largely descriptive and creates classifications, whereas engineering is a result of decision-making; it is prescriptive and generates rules and regularities. Types of classification can be hierarchical (e.g. phylogenetic), parametric (e.g. cladistic, or like the Periodic Table) or combinatorial. However, the driver for change in biology and engineering may well be the same: the resolution of technical conflict.
We present a case study based on a relatively simple natural fibrous composite material—the outer covering or cuticle of arthropods. This layer of material, produced by a single layer of epithelial cells, is called upon to provide a large number of functions, such as shape, structure, hinges, barrier, filter and similar functions (Neville 1975). Some of these functions are intrinsically and profoundly conflicting, although obviously since they coexist some form of compromise must have been evolved, so that the cuticle can be multifunctional. A list of these functions and the associated characteristics of cuticle was generated partly by reference to literature (such as Neville 1975) and partly from experience with insects and insect cuticle over the years.
Consider, then, the function of the cuticle in providing a stiff support or exoskeleton for the insect, attachment for muscles, mechanical protection and control of shape (Vincent 2005). A uniformly stiff skeleton does not permit movement, so hinged areas are needed. In the insect, this has been achieved by making the cuticle softer along the hinge line. This appears to be the same as TRIZ inventive principle (IP) 3: Control of local quality, which is characterized by the following statements: use gradients instead of uniformity (change an object's structure, or its environment, from homo- to heterogeneous); compartmentalize (make each part of an object more adapted to its own purpose); introduce multifunctionality (make each part of an object fulfil a different function like a pencil with an eraser; a hammer with a nail-puller; or a Swiss army knife). Translated into cuticular structure, the hinge areas have different amounts and orientation of chitin (the fibrous component), and the matrix proteins are chemically different from the stiff areas and so more hydrated and softer; the geometry of the hinge can be linear (for an intersegmental membrane) or circular (for a hair socket). Second, stiffness requires extensive cross-linking of the matrix protein, which militates against the use of the cuticle as a labile, resorbable chemical energy store (important for insects which feed only intermittently, such as Rhodnius prolixus, a blood-sucking bug). The resolution of this conflict is achieved by processes described by IP 2: Extraction—extract, isolate or remove an interfering or necessary part or property from an object. Its cuticular translation is to have a minimum of two layers of cuticle, the inner one being only partially stabilized and available for resorption. Since this layer is more likely to take loads in tension, its ability to resist compression is less important. Third, an external skeleton is a barrier to transmission of sensory information about the external environment, a function provided by sensory hairs and holes (the functional basis of the campaniform sensillum and slit sense organ). Note that translucent cuticle, needed over photoreceptors (IP 3), can still be cross-linked and stiff. Resolution here is achieved by the morphology of IP 31 Porous materials, make an object porous; use the pores to introduce a useful substance or function. Last, the animal will gain advantage if it recycles as much of the old cuticle as possible when synthesizing the new one at the moult, which stiffness will compromise since it requires extensive cross-linking. Larval and nymphal cuticles tend to be less cross-linked than adult cuticles, probably for this reason. Resolution is achieved in soft-bodied larvae by prestressing the material in tension to allow the structure to take compressive forces (i.e. a hydrostatic skeleton), which provides protection before the challenge and is described in IP 9 Prior counteraction.
In order to compare these biological resolutions of a design conflict with those which technology would use, it is necessary to convert the functions identified in the cuticle into the conflict topics that TRIZ recognizes. For instance, the functions change stiffness, protection, soft cuticle and stiff skeleton are all reduced to conflict number 11, which is defined as stress or pressure (compression, tension or bending). Similarly, keep poison out, self cleaning, surface properties and waterproof all become conflict number 30, which is external harm affects the object. The conflicting functions are similarly classified into the standard TRIZ features, which now allow the conflicts to be treated in the standard TRIZ system (Vincent & Mann 2002) and a direct comparison to be made between technical and biological solutions to the same problem.
One outcome of this study is that biology and technology solve problems in design in rather different ways. Apart from similarities in spectral filtering which allow the cuticle to let visible light through to photoreceptors, yet resist damaging UV radiation (a resolution which we would resolve in the same way that the insect does), most of the functions of cuticle are provided by detailed control of properties over a very short distance at a chemical and morphological level, summarized in IP 3. The TRIZ matrix derived from technology reveals that we tend to use a rather blunter, more global approach. This is illustrated by the fact that IP 35 is the commonest resolution in the TRIZ matrix, which involves changing a parameter, such as temperature.
TRIZ was conceived in and derived from the environment of things artificial, non-living, technical and engineering. But biomimetics operates across the border between living and non-living systems. And since the reason for looking to nature for solutions is to enhance technical functions, it is necessarily true that TRIZ does not contain many of these functions, and probably does not have the means of deriving them. Despite the fact that TRIZ is the most promising system for biomimetics, we still have a mismatch. This is conflated by a number of factors that are currently not normally observed in a technical system. For instance, the more closely an artificial system is modelled on a living prototype, which is typically complex and hierarchical, the more frequently we have emergent effects, which are unpredictable, therefore mostly unexpected and often harmful. Furthermore, one of the basic features of living systems is the appearance of autonomy or independence of action, with a degree of unexpectedness directly related to the complexity of the living system. This gives living systems great adaptability and versatility, but at the expense of the predictability of the system's behaviour by an external observer. In general, we do not accept unpredictability in technical systems; indeed, we avoid it. But we need to consider this even in our current technology, since nearly every technical system is actually a combination of a technical system in the narrow sense, and a living (usually human) system which is the operator of this technical system. This immediately suggests a broader and more general definition of the term technical system—a biological system, part of the functions of which is delegated to a device that is mostly artificial and/or non-living. This definition includes agriculture. This consideration is commonly omitted; technical systems are often considered in isolation, neglecting any broader context despite the fact that engineering is really a subset of human behaviour. At best this can lead to reduced effectiveness, at worst it produces technological catastrophes and/or social tension and unrest.
Another TRIZ concept of which we make much use is the System Operator or ‘9 Windows’. It is commonly depicted as nine squares arranged 3×3, horizontally representing time (‘before’, ‘now’ and ‘after’) and vertically representing size or hierarchy. This allows us to regularize levels of hierarchy above and below almost any object being studied that can be in a different condition (growth, death, attainment of a goal and so on) before and after the time at which they are currently being considered. In biology, the hierarchical levels are organelle, cell, tissue, organ, organism, population, ecosystem; the hierarchical level of the object under scrutiny is always referred to as the System. The super-System represents the assemblage of which the System is apart (for a cell it is the tissue; for an organism it is the population) and the sub-System represents one of the components of the System (for a cell it is an organelle; for an organism it is an organ).
Increasingly, we are finding that this classification—which in TRIZ is usually regarded simply as a way of expanding the conceptual approach to a problem—is an integral part not only of understanding the problem but of divining where the solution to the problem might lie. This is because the System Operator, especially in biology, defines the context of the System. The implication is that context is less important in engineering, which, in turn, implies that integration between hierarchies (insofar as they exist in engineering) is less good. To some extent this is true, since we find, empirically, that the solution to a problem where hierarchy is less important (as in engineering) usually lies at the same level within the hierarchy (this is probably obvious), whereas the solution to a problem where hierarchy is integral usually lies at a level above (or occasionally below) the current level of the System (figure 1). This result is not obvious. It is apparent, though, that we should take into account the relationship of the sub-System and super-System to a given System. Therefore, we also consider the hierarchy (which regulates resources, energy distribution and the capacity of the System in space and time) and the inertia, (which affects the likelihood of an effect being expressed on a different level of the hierarchy). The further the super-System is from the effector in terms of hierarchical levels, the less the likelihood that the effect will be expressed at the remote level. This causes cumulative properties of biological effects which appear as emergent effects. An effect has influence in the super-System, and the super-System tries to compensate for the actions/effects of its sub-Systems. But the only System that ‘wants’ to change is that which has a goal. The inherent inertia (homeostasis) in biological systems, due to negative feedback, opposes change. That is why an active effect is always coercive at the levels of the super-System and environment, a fact emphasized by the few positive-feedback systems in nature, for example the pheromonal/behavioural induction of swarming in locusts. If the organism is considered as the System (figure 1), then super-System is the environment or ecosystem and sub-System is the organ within the organism. Such classification is to some degree arbitrary, but the general rules are that the super-System ‘wants’ to maximize input and use the System as a resource, while the System ‘wants’ to minimize effort and wants its resource from the super-System.
Figure 1.

The System Operator hierarchy for biological systems.
4. Triz and biology: the synthesis
We have analysed some 500 biological phenomena, covering over 270 functions, at least three times each at different levels of hierarchy. In total, we have analysed about 2500 conflicts and their resolutions in biology, sorted by levels of complexity (Vincent et al. 2005). Even so, this is less than a thousandth of the data contributing to the engineering TRIZ system. To enable us to process this huge amount of information, we established a logical framework (Bogatyreva et al. 2004) captured by the mantra: things do things somewhere. This establishes six fields of operation in which all actions with any object can be executed: things (substance, structure) includes hierarchically structured material, i.e. the progression sub-system–system–super-system; do things (requiring energy and information) implies also that energy needs to be regulated; somewhere (space, time). These six operational fields re-organize and condense the TRIZ classification both of the features used to generate the conflict statements and the inventive principles (appendix 2—electronic supplementary material). Although this generalization blunts the contradictions tool of TRIZ, it actually makes other processes easier (e.g. the implementation of functional analysis in TRIZ, commonly called the Substance–Field system) and is considerably more logical and easier to use than the 39 contradictions system. Moreover, it is more complete, in that the conflict matrix that is constructed from these fields has all the cells occupied. This more general TRIZ matrix (which we name PRIZM—Pravila Reshenija Izobretatel'skih Zadach Modernizirovannye—translated as ‘The Rules of Inventive Problem Solving, Modernized’) is now used to place the inventive principles of TRIZ into a new order that more closely reflects the biological route to the resolution of conflicts. We call this new matrix BioTRIZ.
We can now compare the types of solution to particular pairs of conflicts which are arrived at in technology via classical TRIZ, and in biology. Although the problems commonly are very similar, the inventive principles that nature and technologies use to solve problems can be very different (tables 1 and 2).
Table 1.
PRIZM matrix derived from standard TRIZ matrix.
| fields | substance | structure | space | time | energy | information |
|---|---|---|---|---|---|---|
| substance | 6 10 26 27 31 40 | 27 | 14 15 29 40 | 3 27 38 | 10 12 18 19 31 | 3 15 22 27 29 |
| structure | 15 | 18 26 | 1 13 | 27 28 | 19 36 | 1 23 24 |
| space | 8 14 15 29 39 40 | 1 30 | 4 5 7–9 14 17 | 4 14 | 6 8 15 36 37 | 1 15–17 30 |
| time | 3 38 | 4 28 | 5 14 30 34 | 10 20 38 | 19 35 36 38 | 22 24 28 34 |
| energy | 8 9 18 19 31 36–38 | 32 | 12 15 19 30 36–38 | 6 19 35–37 | 14 19 21 25 36–38 | 2 19 22 |
| information | 3 11 22 25 28 35 | 30 | 1 4 16 17 39 | 9 22 25 28 34 | 2 6 19 22 32 | 2 11 12 21–23 27 33 34 |
Table 2.
PRIZM matrix derived from biological effects: BioTRIZ.
| fields | substance | structure | space | time | energy | information |
|---|---|---|---|---|---|---|
| substance | 13 15 17 20 31 40 | 1–3 15 24 26 | 1 5 13 15 31 | 15 19 27 29 30 | 3 6 9 25 31 35 | 3 25 26 |
| structure | 1 10 15 19 | 1 15 19 24 34 | 10 | 1 2 4 | 1 2 4 | 1 3 4 15 19 24 25 35 |
| space | 3 14 15 25 | 2–5 10 15 19 | 4 5 36 14 17 | 1 19 29 | 1 3 4 15 19 | 3 15 21 24 |
| time | 1 3 15 20 25 38 | 1–4 6 15 17 19 | 1–4 7 38 | 2 3 11 20 26 | 3 9 15 20 22 25 | 1–3 10 19 23 |
| energy | 1 3 13 14 17 25 31 | 1 3 5 6 25 35 36 40 | 1 3 4 15 25 | 3 10 23 25 35 | 3 5 9 22 25 32 37 | 1 3 4 15 16 25 |
| information | 1 6 22 | 1 3 6 18 22 24 32 34 40 | 3 20 22 25 33 | 2 3 9 17 22 | 1 3 6 22 32 | 3 10 16 23 25 |
In fact, the similarity between the TRIZ and BioTRIZ matrices is only 0.12, where identity is represented by 1. Only the principles of spatial composition are significantly similar (0.73) in biology and technology. The differences are in large part to do with the pervasive presence of hierarchy in biological structures and systems. But they are also to do with the degree of detail it is possible to incorporate into a structure which, like an organism, is self-assembled and even designed by the forces of molecular interaction (Vincent 1999, 2005).
Hierarchy is exceedingly important in the solution of problems (see above); this is not obvious because our current technologies are either not significantly hierarchical, or ignore any hierarchical structure. However, a strictly scalar approach is difficult since many basic biological functions occur in organisms over a very wide range of sizes. Thus, the basic processes of cellular metabolism are more or less invariant from protista to large mammals; complexity and added functionality are achieved by adding levels of hierarchy which can be quantified quasistatically by considering the number of cell types in an organism (Bonner 1965), or in a more dynamic way by considering the provision of infrastructure (West & Brown 2005). The hierarchical approach is also difficult to use, since in engineering (taken here to represent the entire spectrum of effects which people impose on the world in an attempt to make it more habitable) hierarchy is not as well developed as in biology. The definition of cause and effect needs clarification: in physical terms, ambient pressure (cause) dictates the temperature of the boiling point of pure water (effect); in biological terms, an effect is a problem to be solved by the organism and the cause is the method of solution. Changing the boiling temperature invokes the operation field energy as does changing pressure. These are at the substance level of hierarchy. At the molecular level of hierarchy we would say, ‘the speed at which molecules move in a liquid (operation field is time) depends on the pressure (operation field is energy) and temperature (energy) which we apply to them.’ Appendix 3 of the electronic supplementary material illustrates our classification of effects.
We can now comment quantitatively on the differences between biology and technology (figures 2 and 3) At size levels of up to 1 m, where most technology is sited, the most important variable for the solution of a problem is manipulation of energy usage (up to 60% of the time), closely followed by use of material (figure 2). Thus, faced with an engineering problem, our tendency is to achieve a solution by changing the amount or type of the material or changing (usually increasing) the energy requirement. But in biology the most important variables for the solution of problems at these scales are information and space (figure 3). This can be illustrated by comparing the functionality of biological and man-made polymers, proteins and polysaccharides. People have produced over 300 polymers, but none of them is as versatile or responsive as these two biological polymers. For example, at the primary level, proteins are remarkably similar in the energy required for their synthesis since the peptide bond is the pervasive motif. However, there is a wide range varying from inert fibrous (such as collagen or silk) to responsive fibrous (such as muscle) and from inert globular (such as skeletal proteins in insects) to responsive globular (such as enzymes). The difference between these proteins is less to do with the energy required for their synthesis than the complement and order of the amino acids, which is a derivation of information stored in the DNA of the nucleus or elsewhere. Space is also relevant, since the shape of the protein is an essential part of its function. The same story pertains when considering biological hard tissues. Calcium, and less commonly silicon, derivatives are commonest, and carbonates and phosphates are predominant. This limited range of chemicals (with the occasional addition of iron, zinc or manganese) suffices for nearly all biological hard materials. In insect cuticle, the main variety of function is achieved by making complex composites with anything up to 10 constituents and a range of properties (like Young's modulus), thus covering several orders of magnitude with a single material (Vincent & Wegst 2004).
Figure 2.

Engineering TRIZ solutions arranged according to size/hierarchy.
Figure 3.

Biological effects arranged according to size/hierarchy.
This comparison between the few materials of biology and the many materials of technology has been made commonly, but never explained functionally. We can now do this. It appears that biological systems have developed relatively few synthetic processes at low size at which the contribution of energy is significant; but the main variety of function is achieved by manipulations of shape and combinations of materials at larger sizes achieved by high levels of hierarchy, where energy is not an issue. This is a very subtle biomimetic lesson. Instead of developing new materials each time we want new functionality, we should be adapting and combining the materials we already have. Obviously, we are doing this to an extent, but it is unclear whether we recognize this as a significant route rather than a route of convenience.
In order to approach this, we note that engineering materials can be mapped with property dimensions, such as mechanical, thermal, electrical, optical and cost. These maps show significant gaps in property space, which can sometimes be filled with hybrids of two or more materials (A, B) or of material and space (=A+B+ shape+scale; Ashby & Brechet 2003). Particulate and fibrous composites are examples of one type of hybrid, but there are also sandwich structures, foams, lattice structures and others. The structural variables expand the design space of homogeneous materials, allowing the creation of new materials with specific property profiles. Although it can be difficult and expensive to make a successful hybrid, so is the alternative of developing a new material. Both routes involve exploration of property space; the hybrid will be more likely to deliver the required properties, but the quality may be compromised by factors, such as chemical incompatibility of the components. We already have some tools to short-circuit this process: for instance, a database of composites, of reinforcing fibres, chemistries and choice of structure; these methods allow promising hybrids to be identified. To go further, we should attenuate a significant number of our materials synthesis systems, concentrating on those with the least energy requirement and the greatest initial variability, and generate the required functionality by closer control of the information content (e.g. monomer sequence). We can also realize the potential of nanotechnology, which is to escape from the nano approach as soon as possible, and progress to making larger structures which can self-assemble in a programmed manner using the information captured as, for instance, the type and arrangement of monomers along the polymer chain. Another implication of this argument is that we should have a database of the engineering properties and hybridization potential of both technical and biological materials. The database of technical materials is comparatively well known; that of biological materials is due almost entirely to the efforts of Wegst (Wegst & Ashby 2004) and is as yet unavailable generally.
5. The expansion of triz
In order to develop TRIZ as a framework for biomimetics, we first have to make biological information available within its structure by cataloguing and classifying the effects of the actions, and mechanisms of functioning, of biological systems, and perhaps modify and expand TRIZ, so that it can cope with the extra varieties of input information. For this task, we need the framework to be suitable for describing and classifying both engineering and biological data. In general, we have to:
find patterns in the solution of problems in technology (the original TRIZ system);
find patterns in the solution of problems in biology (develop a modified, BioTRIZ, system);
make these patterns compatible within a new general Biomimetic TRIZ.
The data from technology and biology present a continuum of variables and contradictions at different levels of complexity—from a cellular organelle to an ecosystem, from a single transistor in a microcontroller to a fleet of aircraft. The biological data have to be structured into a framework that is compatible with technology to operate with this large amount of very varied information. Initially, we designed auxiliary conflict matrices for biological structures and environments, and for causes and limits of actions. These allow us to break natural data into engineering-like chunks of information and cover the primary TRIZ components of ‘function’, ‘effect’ and ‘conflict’. The matrix we have developed takes account of:
an object and its parts (which are accounted for in the TRIZ contradiction matrix);
the environment in which the object operates;
the limits and causes of action;
the ultimate purpose of action;
the resources and auxiliary systems involved.
It incorporates the ideas of several TRIZ tools within a single context, and is thus not only a database of physical effects, but also a database of intention and motivation. This is needed because biological systems are teleological. Their goal is a condition that enhances the reproduction of the individual. Thus, no biological system can be described as having only emergent behaviour. Although a computer model can describe the behaviour of ants or termites in the apparent absence of a target state, the goal has been set by the experimenter. In real life, the goal is set implicitly by the individual organism or by its forbears, and the function of a biological system is the action needed to achieve a useful or desired condition. In technical systems, the achievement of the goal is delegated to a technical device, but the goal remains the same: the future condition of the system. So, the function of a technical system is the action needed to achieve a useful or desired condition with the help of a technical device. The technical effect is equivalent to the use of tools, a phenomenon observed in many mammals, birds and insects. Technology is not uniquely human. An isolated technical system cannot set its own goals, although a machine with embedded logic functions could transgress this differentiation (Vincent et al. 2005).
6. Biomimetics using TRIZ
We need to show that the introduction of biology into TRIZ does not compromise its ability to solve engineering problems and yet makes it compatible with the natural solutions to various problems from biology. This is best shown with a case study. The sequence of solving the problem is:
define the problem in the most general, yet precise way. It is essential to avoid specific directions of thought or premature solution of the problem. One should also avoid special terminology, because it inevitably confines the thinking space to the existing (i.e. conventional) sphere. Then list the desirable and undesirable properties and functions;
analyse and understand the problem and so uncover the main conflicts or contradictions. The technical conflicts are then identified in the TRIZ matrix2 and listed. Find the functional analogy in biology (look into the PRIZM) or go to the biological conflict matrix (table 2);
compare the solutions recommended by biology and TRIZ. Find the common solutions for biological and engineering fields. List the technical and biological principles thus recommended;
based on these common solutions, build a bridge from natural to technical design. To make the technical and biological systems compatible, make a list of their general recommended compositions;
to create a completely new technology, add to the basic TRIZ principles some pure technical or pure biological ones (e.g. those listed in appendix 1—electronic supplementary material).
6.1 Case study: the cat's claw wheel
In many areas, the winter temperatures go below 0 °C, leading to dangerously icy road conditions. But the spikes or chains often attached to wheels for the whole winter damage ice-free roads. It is inconvenient to be changing continually between special winter and summer tyres or putting chains on and off the wheels. It would be better to have an instantly changing tyre, which would be a conventional rubber tyre on an ice-free road and able to generate high friction on an icy surface. Thus, we have a typical TRIZ conflict, with requirements to be soft and smooth and to be solid, hard and sharp. It is also possible to formulate our problem as: ‘we need adequate friction between a wheel and a road under variable road surface conditions.’ The friction must also vary without the weight of the vehicle changing. Now follow the steps above and try to find a biomimetic solution. How can we maximize the grip of the tyre to the road surface under all driving conditions? How can we change the gripping mode instantly when the type of surface changes? A relevant functional biological prototype would be a cat's paw with claws that can be withdrawn, allowing the soft pad to contact the ground. Let us compare the suggestions from the conventional 39×39 TRIZ matrix with our 6×6 PRIZM TRIZ and biological matrices (tables 2 and 3).
Table 3.
The degree of similarity in the inventive principles between technology and biology.
| fields of operation | substance | structure | space | time | energy | information |
|---|---|---|---|---|---|---|
| substance | 0.18 | 0 | 0.22 | 0.2 | 0 | 0 |
| structure | 0.36 | 0 | 0.73 | 0.25 | 0.29 | 0.28 |
| space | 0.18 | 0.17 | 0 | 0.25 | 0 | 0 |
| time | 0 | 0 | 0.2 | 0.22 | 0.18 | 0 |
| energy | 0.22 | 0 | 0 | 0 | 0 | 0.36 |
| information | 0 | 0 | 0 | 0 | 0 | 0 |
The conflict is that force in contact with the road should increase (feature 10) but not by increasing the weight of the vehicle (feature 1), which would be the usual way to increase the normal force, with the TRIZ matrix suggesting IP 1 Segmentation; IP 8 Anti-weight; IP 18 Mechanical vibration and IP 37 Thermal expansion. The solutions suggested by nature from the Bio-TRIZ matrix are:
IP 1 Segmentation: the cat's paw is segmented into several pads and claws;
IP 3 Local quality: the paw is not sharp in its entirety, but only at some points—at the operating zones of the claws;
IP 14 Spheroidality or curvature: the pads are spheroidal, the claws are curved;
IP 15 Dynamics: the claws can be deployed or retracted at will;
IP 17 Another dimension: giving the contact surface a third dimension, i.e. the soft paw pad with the retracted claws is quasi-planar; when the claws are deployed the paw moves into the third plane.
Alternatively, we can reduce the contact area to maximize ground contact stress (feature 5) without changing the weight of the vehicle (feature 1): how to minimize contact surface area without losing weight of the object—the field 5/1 in the TRIZ matrix. In this case, TRIZ recommends IP 2 Taking out; IP 4 Asymmetry; IP 17 Another dimension and IP 29 Pneumatics and hydraulics. Solutions from the Bio-TRIZ matrix repeat those above:
IP 3 Local quality;
IP 15 Dynamics;
IP 17 Another dimension.
These again suggest versatile claws, which can be retracted and protracted according to necessity.
The third conflict can be formulated as: how can the wheel possess the quality sharpness only under icy conditions and/or how to grip the road surface, or how to reduce the ground contact area without losing adaptability and composition stability. This points to fields 5/35 and 5/13 in the TRIZ conflict matrix, and IP 2 Taking out; IP 11 Prior cushioning; IP 13 The other way round; IP 15 Dynamics; IP 30 Flexible shells and thin films and IP 39 Inert atmosphere. The Bio-TRIZ matrix recommends
IP 1 Segmentation;
IP 17 Another dimension;
IP 19 Periodic action.
Overall, the principles held in common between the three conflict pairs are IP 1, IP 15 and IP 17. This suggests that sharp and soft parts should be segmented and/or alternately structured (arranged in space), perhaps as multiple claws and pads. These alternating units should be alternated in time as well, in other words, soft and sharp modes of operation of the wheel should be switched on and off in time. And eventually, IP 17 clearly indicates the necessity to design some spikes (claws, serrations, teeth and so on) to provide adequate grip for the wheel. All this shows that we should design the wheel/tyre with spikes, which will operate like cat's claws—dynamically, according to the prevailing road conditions. The wheel and tyre already possesses IP 29 Pneumatics and hydraulics and IP 30 Flexible shells and thin films—the flexible pneumatic rubber tyre. IP 2 Taking out should be also employed as already recommended above. It means that the alternated segmented parts due to their dynamics should perform the ‘soft’ and ‘sharp’ modes due to the taking out principle. And the last (but not least) point is that one should pay attention to IP 13 The other way round. It means that the supposed wheel with the retractable/protractible claws is much easier to design vice versa—the rigidly mounted claws are combined with the inflatable/deflatable soft part, the pneumatic tyre. Technically, it is much more convenient to inflate and deflate a tyre than to make sophisticated actuating protraction and retraction mechanism for numerous spikes. Eventually, the wheel would look like figure 4.
Figure 4.
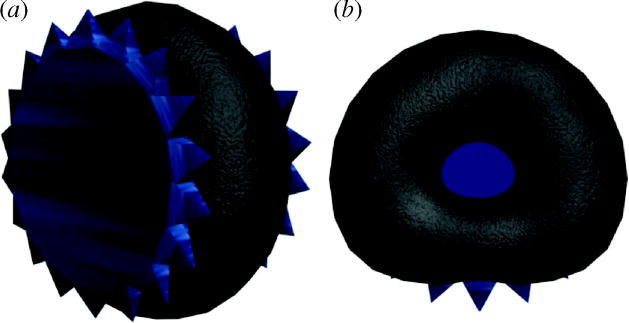
The ‘cat-paw’ wheel, (a) inflated and (b) ready for icy surfaces.
6.2 Other TRIZ tools in biomimetics
We have described the relevance of only one of the TRIZ tools, the contradiction matrix, and related it to the System Operator and hierarchy. TRIZ offers more similarities between biology and engineering, notably in its Evolutionary Trends series, where the tendency of technical systems is to evolve towards increased functional complexity and versatility, often with associated structural simplicity (Pahl & Vincent 2002). In both technology and biology, control systems tend towards decentralized feedback; skeletal structures tend towards compliance and flexibility (although obviously gravity exerts a constraint on this tendency). We have merely observed these remarkable parallels without attempting analysis of any sort. It would be a fruitful area for palaeontological comparisons and predictions, and could either highlight constraints in biology that had been overlooked, or could suggest evolutionary trends in technology which biology has been able to exploit more effectively or which technology has ignored. A combination of functional analysis and the identification of inventive principles gives a more sophisticated method called Substance–Field (or Su-Field or S-Field) analysis.
Other TRIZ tools are methods mostly to help sharpen the definition of a problem and to ensure that the problem is not wrongly named or identified, which could lead to the adoption of a wrong or inappropriate solution.
7. Conclusion
Biomimetics is not a new way of adapting ideas from biology, but it is currently empirical in its approach. If it is to build on current successes, and to be able to serve our technological society, then it needs some sort of regularizing, best introduced as a set of common principles. Such principles exist in TRIZ, and it is in this area that there seems to be the most promise for establishing a transparent method for technologists to access biology, which they otherwise view as an arcane and complex world. This is because while TRIZ was developed as a systems approach for engineering, biology is, itself, a system. The benefits to be gained from biomimetics are not yet totally obvious, other than to deepen the human race's box of technical tricks. However if, as our study (and indeed many other studies) suggests, biological functions and processes are less reliant on energy, then the implications could be very significant. That this change in our approach to technology and engineering could be achieved by developing nanotechnology (see above) would surely please Richard Feynman (1959).
Acknowledgments
We thank the EPSRC for funding this project.
Footnotes
In TRIZ these are called inventive principles, of which there are about 40. Appendix 1 of the electronic supplementary material lists both technical and biological examples of the principles.
The classical TRIZ contradiction matrix, at 39×39 elements, is much larger than the PRIZM matrix, more detailed and more difficult to use. It is available from many sources (e.g. TRIZ Journal on the Internet) and so is not provided here.
Supplementary Material
Appendix 1: Expansion of the inventive principles to include biological examples Appendix 2: Apportioning Altshuller's conflict features and inventive principles to the PRIZM categories (to accompany tables and figures 2 and 3) Appendix 3: Examples of functions at various size scales in biology and technology (to accompany figures 2 and 3)
References
- Altshuller G. The innovation algorithm, TRIZ, systematic innovation and technical creativity. Technical Innovation Center Inc; Worcester, MA: 1999. [Google Scholar]
- Anderson A.J, McOwan P.W. Model of a predatory stealth behaviour camouflaging motion. Proc. R. Soc. B. 2003;270:489–495. doi: 10.1098/rspb.2002.2259. doi:10.1098/rspb.2002.2259 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Anon. 2005 DaimlerChrysler Hightech Report 2005, pp. 58–63. http://www.daimlerchrysler.com/Projects/c2c/channel/documents/783295_Gone_Fishin.pdf
- Ashby M.F, Brechet Y.J.M. Designing hybrid materials. Acta Mater. 2003;51:5801–5821. doi:10.1016/S1359-6454(03)00441-5 [Google Scholar]
- Autumn K, et al. Evidence for van der Waals adhesion in gecko setae. Proc. Natl Acad. Sci. USA. 2001;99:12 252–12 256. doi: 10.1073/pnas.192252799. doi:10.1073/pnas.192252799 [DOI] [PMC free article] [PubMed] [Google Scholar]
- Bannasch R. Int. Airship Conf. University of Stuttgart; 1993. Drag minimisation on bodies of revolution in nature and engineering; pp. 79–87. [Google Scholar]
- Barthlott W, Neinhuis C. Purity of the sacred lotus, or escape from contamination in biological surfaces. Planta. 1997;202:1–8. doi:10.1007/s004250050096 [Google Scholar]
- Bartol I.K, Gharib M, Webb P.W, Weihs D, Gordon M.S. Body-induced vortical flows: a common mechanism for self-corrective trimming control in boxfishes. J. Exp. Biol. 2005;208:327–344. doi: 10.1242/jeb.01356. doi:10.1242/jeb.01356 [DOI] [PubMed] [Google Scholar]
- Bechert D.W, Bruse M, Hage W, Meyer R. Fluid mechanics of biological surfaces and their technological application. Naturwissenschaften. 2000;87:157–171. doi: 10.1007/s001140050696. doi:10.1007/s001140050696 [DOI] [PubMed] [Google Scholar]
- Bernhard C.G, Miller W.H, Møller A.R. The insect corneal nipple array. A biological, broad-band impedance transformer that acts as a antireflection coating. Acta Physiol. Scand. 1965;63:1–79. [PubMed] [Google Scholar]
- Bogatyrev N.R. Ecological engineering of survival. Publishing house of SB RAS; Novosibirsk, Russia: 2000. [Google Scholar]
- Bogatyreva O, Shillerov A, Bogatyrev N. Proc. ETRIA World Conference. TRIZ Future 2004, Florence, Italy, 5 November 2004. European TRIZ Association; Hannover: 2004. Patterns in TRIZ contradiction matrix: integrated and distributed systems; pp. 35–42. [Google Scholar]
- Bonner J.T. Size and cycle. Princeton University Press; Princeton, NJ: 1965. [Google Scholar]
- Chaplin R.C, Gordon J.E, Jeronimidis G. Development of a novel fibrous composite material. 1983. USA Patent no. 4 409 274. [Google Scholar]
- Coineau Y, Kresling B. Les inventions de la nature et la bionique. Museum National d'Histoire Naturelle; Paris, France: 1987. [Google Scholar]
- Domb E. The 39 features of Altshuller's contradiction matrix. TRIZ J. 1998 See http://www.triz-journal.com/archives/1998/11/d/index.htm. [Google Scholar]
- Feynman R.P. There's plenty of room at the bottom. Eng. Sci. 1959;23:22–36. [Google Scholar]
- Geim A.K, Dubonos S.V, Grigorieva I.V, Novoselov K.S, Zhukov A.A, Shapoval S.Y. Microfabricated adhesive mimicking gecko foot-hair. Nat. Mater. 2003;2:461–463. doi: 10.1038/nmat917. doi:10.1038/nmat917 [DOI] [PubMed] [Google Scholar]
- Gordon J.E, Jeronimidis G. Composites with high work of fracture. Phil. Trans. R. Soc. A. 1980;294:545–550. [Google Scholar]
- Harkness J.M. A lifetime of connections—Otto Herbert Schmitt, 1913–1998. Phys. Perspect. 2001 See http://www.thebakken.org/research/Schmitt/Otto.htm. [Google Scholar]
- Jones K.D, Platzer M.F. On the design of efficient micro air vehicles. In: Brebbia C.A, Sucharov L.J, Pascolo P, editors. Design and nature. WIT Press; Udine, Italy: 2002. pp. 67–76. [Google Scholar]
- Lai J.C.S, Platzer M.F. Characteristics of a plunging aerofoil at zero freestream velocity. AIAA J. 2001;39:531–534. [Google Scholar]
- Lee D.W. Unusual strategies of light absorption in rain-forest herbs. In: Givnish T.J, editor. On the economy of plant form and function. Cambridge University Press; Cambridge, UK: 1986. pp. 105–131. [Google Scholar]
- Li J.-Q, Sun J.-R, Ren L.-Q, Chen B.-C. Sliding resistance of plates with bionic bumpy surface against soil. J. Bionics Eng. 2004;1:207–214. [Google Scholar]
- Mason A.C, Oshinsky M.L, Hoy R.R. Hyperacute directional hearing in a microscale auditory system. Nature. 2001;410:686–690. doi: 10.1038/35070564. doi:10.1038/35070564 [DOI] [PubMed] [Google Scholar]
- Mattheck C. Engineering components grow like trees. Kernforschungscentrum; Karlsruhe, Germany: 1989. [Google Scholar]
- McHenry M.J, Pell C.A, Long J.H. Mechanical control of swimming speed: stiffness and axial wave form in undulating fish models. J. Exp. Biol. 1995;198:2293–2305. doi: 10.1242/jeb.198.11.2293. [DOI] [PubMed] [Google Scholar]
- Neville A.C. Biology of arthropod cuticle. Springer; Berlin: 1975. [Google Scholar]
- Pahl A.-K, Vincent J.F.V. TRIZcon 2002. 2002. Using TRIZ-based evolution trends to integrate biology with engineering design. pp. 26/1–26/15. Philadelphia, PA. [Google Scholar]
- Parker A.R, Lawrence C.R. Water capture by a desert beetle. Nature. 2001;414:33–34. doi: 10.1038/35102108. doi:10.1038/35102108 [DOI] [PubMed] [Google Scholar]
- Parker A.R, Hegedus Z, Watts R.A. Solar-absorber type antireflector in the eye of an Eocene fly (45 Ma) Proc. R. Soc. B. 1998;265:811–815. doi:10.1098/rspb.1998.0364 [Google Scholar]
- Pettigrew J.B. Animal locomotion or walking, swimming, and flying, with a dissertation on aeronautics. Henry S. King & Co; London: 1873. [Google Scholar]
- Reeve R, Webb B. New neural circuits for robot phonotaxis. Phil. Trans. R. Soc. A. 2001;361:2245–2266. doi: 10.1098/rsta.2003.1274. doi:10.1098/rsta.2003.1274 [DOI] [PubMed] [Google Scholar]
- Schmitt O. Third Int. Biophysics Congress. 1969. Some interesting and useful biomimetic transforms. p. 297. [Google Scholar]
- Stache, M. 2004 See http://www.bionik.tu-berlin.de/user/michaels/michaels.html
- Stager J, Skube J, Tanner D.A, Winston W, Morris H.H. Swimming Technique. 2000. Bodysuits a bust? Oct–Dec issue. [Google Scholar]
- Stoddart P.R, Cadusch P.J, Boyce T.M, Erasmus R.M, Comins J.D. Optical properties of chitin: surface-enhanced Raman scattering substrates based on antireflection structures on cicada wings. Nanotechnology. 2006;17:680–686. doi:10.1088/0957-4484/17/3/011 [Google Scholar]
- Swift J. Travels into several remote nations of the world by Lemuel Gulliver—Part III: a voyage to Laputa, Balnibarbi, Luggnagg, Glubbdubdrib and Japan. Benjamin Motte; London: 1726. [Google Scholar]
- Tucker V.A. Gliding birds: reduction of induced drag by wing tip slots between the primary feathers. J. Exp. Biol. 1993;180:285–310. [Google Scholar]
- Velcro S.A. 1955. Improvements in or relating to a method and a device for producing a velvet type fabric. Patent no. 721 338 Switzerland. [Google Scholar]
- Vincent J.F.V. From cellulose to cell. J. Exp. Biol. 1999;202:3263–3268. [PubMed] [Google Scholar]
- Vincent J.F.V. Deconstructing the design of a biological material. J. Theor. Biol. 2005;236:73–78. doi: 10.1016/j.jtbi.2005.02.017. doi:10.1016/j.jtbi.2005.02.017 [DOI] [PubMed] [Google Scholar]
- Vincent J.F.V, Mann D.L. Systematic technology transfer from biology to engineering. Phil. Trans. R. Soc. A. 2002;360:159–174. doi: 10.1098/rsta.2001.0923. doi:10.1098/rsta.2001.0923 [DOI] [PubMed] [Google Scholar]
- Vincent J.F.V, Wegst U.G.K. Design and mechanical properties of insect cuticle. Arthropod Struct. Dev. 2004;33:187–199. doi: 10.1016/j.asd.2004.05.006. doi:10.1016/j.asd.2004.05.006 [DOI] [PubMed] [Google Scholar]
- Vincent J.F.V, Bogatyreva O.A, Pahl A.-K, Bogatyrev N.R, Bowyer A. Putting biology into TRIZ: a database of biological effects. Creativity Innov. Manage. 2005;14:66–72. doi:10.1111/j.1476-8691.2005.00326.x [Google Scholar]
- Vogel S. Cats' paws and catapults. WW Norton & Co; New York, NY: 1998. [Google Scholar]
- Wagner T, Neinhuis C, Barthlott W. Wettability and contaminability of insect wings as a function of their surface sculptures. Acta Zool. (Stockholm) 1996;76:213–225. [Google Scholar]
- Wegst U.G.K, Ashby M.F. The mechanical efficiency of natural materials. Phil. Mag. 2004;84:2167–2186. doi:10.1080/14786430410001680935 [Google Scholar]
- West G.B, Brown J.H. The origin of allometric scaling laws in biology from genomes to ecosystems: towards a quantitative unifying theory of biological structure and organisation. J. Exp. Biol. 2005;208:1575–1592. doi: 10.1242/jeb.01589. doi:10.1242/jeb.01589 [DOI] [PubMed] [Google Scholar]
Associated Data
This section collects any data citations, data availability statements, or supplementary materials included in this article.
Supplementary Materials
Appendix 1: Expansion of the inventive principles to include biological examples Appendix 2: Apportioning Altshuller's conflict features and inventive principles to the PRIZM categories (to accompany tables and figures 2 and 3) Appendix 3: Examples of functions at various size scales in biology and technology (to accompany figures 2 and 3)