

Abstract
Instrumented treadmills offer significant advantages for analysis of human locomotion, including recording consecutive steady-state gait cycles, precisely controlling walking speed, and avoiding force plate targeting. However, some studies of hemiparetic walking on a treadmill have suggested that the moving treadmill belt may fundamentally alter propulsion mechanics. Any differences in propulsion mechanics during treadmill walking would be problematic since recent studies assessing propulsion have provided fundamental insight into hemiparetic walking. The purpose of this study was to test the hypothesis that there would be no difference in the generation of anterior/posterior (A/P) propulsion by performing a carefully controlled comparison of the A/P ground reaction forces (GRFs) and impulses in healthy adults during treadmill and overground walking. Gait data were collected from eight subjects walking overground and on a treadmill with speed and cadence controlled. Peak negative and positive horizontal GRFs in early and late stance, respectively, were reduced by less than 5% of body weight (p < 0.05) during treadmill walking compared to overground walking. The magnitude of the braking impulse was similarly lower (p < 0.05) during treadmill walking, but no significant difference was found between propulsion impulses. While there were some subtle differences in A/P GRFs between overground and treadmill walking, these results suggest there is no fundamental difference in propulsion mechanics. We conclude that treadmill walking can be used to investigate propulsion generation in healthy and by implication clinical populations.
Keywords: Gait, Propulsion, Hemiparetic, Ground reaction forces
1. Introduction
Instrumented treadmills are becoming more common to study human locomotion (e.g., Gottschall and Kram, 2005; Masani et al., 2002) and offer significant advantages for measuring ground reaction forces (GRFs). The advantages of an instrumented treadmill include recording consecutive steady-state gait cycles, precisely controlling walking speed, and avoiding force plate targeting. In contrast, conventional overground data collection consists of averaging non-consecutive steps, often with incomplete bilateral data (i.e., contralateral foot is not always on force plate when collecting ipsilateral GRFs). Additionally, overground data collection difficulties are exacerbated in clinical populations prone to fatigue (e.g., post-stroke hemiparesis). Although treadmill walking may overcome these limitations, potential confounds exist if subjects do not walk the same as they do overground (e.g., Alton et al., 1998; Boda et al., 1994; Murray et al., 1985; Strathy et al., 1983).
Recent studies by our group have established the utility of quantifying propulsion (i.e., anterior–posterior (A/P) GRFs) during walking in persons with post-stroke hemi-paresis (Balasubramanian et al., 2007; Bowden et al., 2006; Turns et al., 2007), but few studies have examined differences in the propulsive GRFs (Riley et al., 2007). The A/P GRF and corresponding impulses reflect the neuromuscular contributions to forward propulsion, and therefore understanding the similarities in braking and propulsion produced in each walking mode will provide insight into treadmill walking mechanics. There are assertions in the hemiparetic walking literature related to the moving treadmill belt, such as treadmill walking “provides a support surface that pulls the stance limb backward” (Harris-Love et al., 2004) or “the constant speed of the belt dictates the rate at which hip extension occurs on the treadmill” (Bayat et al., 2005), which if proven true would imply fundamentally different propulsion characteristics in the two modes. Any differences in propulsion mechanics may cause the observed kinematic differences between treadmill and overground walking (i.e., increased cadence, decreased hip range-of-motion and decreased step length) (Alton et al., 1998; Murray et al., 1985; Strathy et al., 1983).
While our ultimate goal is to validate instrumented treadmill use for collecting A/P GRFs to study propulsion generation in hemiparetic walking, the specific purpose of this study was to test the hypothesis that there would be no difference in the generation of A/P GRFs and impulses in healthy adults during treadmill and overground walking. We tested healthy subjects since differences between walking modes in hemiparetic subjects (e.g., Bayat et al., 2005; Harris-Love et al., 2004) may cause a confound unrelated to propulsion mechanics. Quantifying any propulsion differences would provide important insight into potential limitations of treadmill use for gait analysis in rehabilitation research in general, and hemiparetic walking in particular.
2. Methods
2.1. Subjects
Eight healthy subjects (2 male, 6 female; age: 30.6 ± 9.9 yr) provided informed consent prior to data collection in this study approved by the institutional review boards of the University of Texas at Austin and University of Florida.
2.2. Instrumentation
An instrumented split belt treadmill (Tecmachine, Andrézieux-Bouthéon, France) with the treadmill surface even with the laboratory floor was used to record GRFs for both the treadmill and overground (i.e., the belt-speed was set at zero) walking trials. The treadmill was placed in the centre of a 12-camera motion capture (Vicon Motions Systems Ltd, Oxford, UK) viewing volume. The treadmill consisted of two side-by-side belt surfaces with sensors that independently measured the 3D forces and moments applied by each foot at 2000 Hz. Reflective markers were placed on each heel and the sacrum, and their 3D positions were recorded at 100 Hz.
2.3. Procedures
Subjects first walked overground at their self-selected speed for ten trials. Data for each trial included the steps immediately previous to and following contact with the belt surface acting as a force plate. The large belt surface allowed recording of at least one stance phase and avoided force plate targeting. The leg (right or left) that made a good force plate contact during the initial trial was then selected (target leg) and used for all subsequent trials of that subject (so that subjects could keep speed consistent by starting in the same position in each trial). Gait cycles were defined from ground contact to ground contact of the same leg, with the GRF record determining most contacts. Markers placed on the heel were used to calculate ground contact when the foot did not contact the force plate. For the gait cycle associated with each complete stance phase on the force plate, we calculated velocity from the average velocity of the sacrum marker and cadence from the inverse of the stride time. The mean and standard deviation of the velocity were calculated for each combination of five strides, with the mean of the five trials with the lowest standard deviation used as the treadmill speed. The overground cadence was then calculated from the same trials, and a metronome was used to control the cadence for the treadmill trials. Three walking trials were conducted on the treadmill, each lasting 30 s, which resulted in 16–20 gait cycles per trial, depending on individual stride length. The five strides whose mean walking speed most closely matched the overground mean were then selected for analysis between conditions. This allowed us to carefully match speed and cadence between conditions, since A/P GRFs are extremely sensitive to these variables.
2.4. Data analysis
The GRF data were low-pass filtered at 20 Hz using a fourth order Butterworth filter. The peak braking and propulsive GRFs and the total braking and propulsive impulses (i.e., time integral of the negative and positive A/P GRF, respectively) associated with each of the five strides were calculated and averaged for each subject and condition. The Shapiro–Wilk test was used to test the null hypothesis that the data were normally distributed. Since this null hypothesis was not rejected, a two-sided paired t-test was used to identify differences between conditions (p < 0.05).
3. Results
There were subtle, but significant, differences observed in the peak GRFs between treadmill and overground walking, even though no significant differences were found in walking speed (1.57 ± 0.15 vs. 1.56 ± 0.19 m/s, p = 0.83) or cadence (117.4 ± 8.3 vs. 117.1 ± 7.4 step/min, p = 0.75) between conditions. The peak negative and positive horizontal GRFs in early and late stance, respectively (Fig. 1), were reduced by less than 5% BW during treadmill walking compared to overground walking (Table 1). The magnitude of the braking impulse was also slightly less during treadmill walking, but there was no significant difference between the propulsion impulses (Table 2).
Fig. 1.
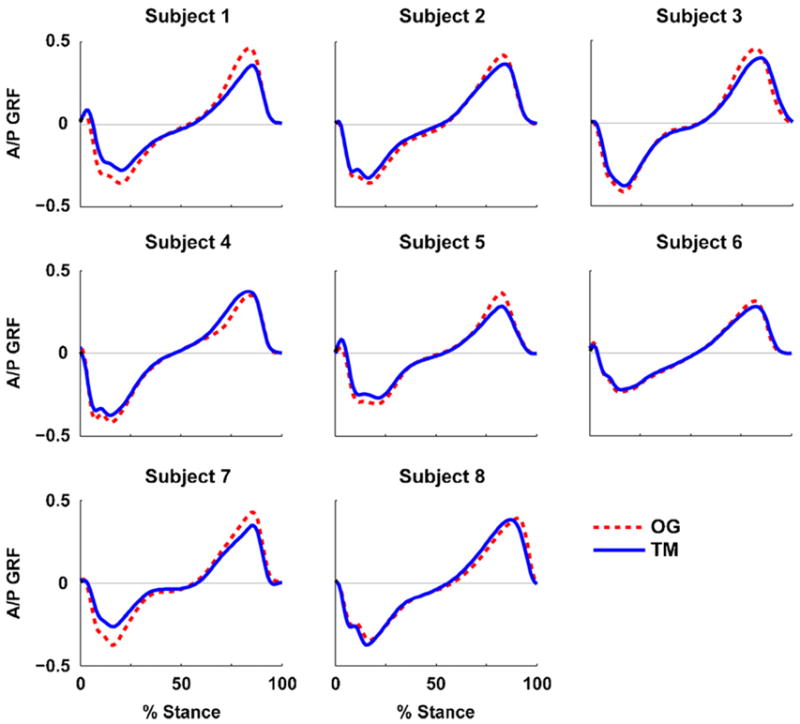
Mean A/P GRFs (normalized by body weight) for the overground (OG) and treadmill (TM) conditions during the stance phase for each subject.
Table 1.
Means, standard deviations (SD) and statistical results for the ground reaction force (GRF) peaks (normalized by body weight) between overground and treadmill walking
| Variable | Overground mean ± SD | Treadmill mean ± SD | Difference mean ± SD | Statistical comparison p-value | Significance |
|---|---|---|---|---|---|
| Braking peak 1 | −0.36 ± 0.06 | −0.32 ± 0.06 | −0.04 ± 0.04 | 0.03 | a |
| Propulsive peak 2 | 0.40 ± 0.05 | 0.35 ± 0.04 | 0.05 ± 0.05 | 0.03 | a |
Indicates significantly different.
Table 2.
Means, standard deviations (SD) and statistical results for the braking and propulsion impulses between overground and treadmill walking
| Variable | Overground mean ± SD | Treadmill mean ± SD | Difference mean ± SD | Statistical comparison
|
|
|---|---|---|---|---|---|
| p-Value | Significance | ||||
| Braking impulse | −0.056 ± 0.006 | −0.052 ± 0.008 | 0.005 ± 0.005 | 0.04 | a |
| Propulsion impulse | 0.052 ± 0.004 | 0.049 ± 0.007 | −0.003 ± 0.007 | 0.24 | |
The units for the impulses are N-s normalized by body weight.
Indicates significantly different.
4. Discussion
While there are subtle statistically significant differences between the A/P GRFs in overground and treadmill walking (reduced peak braking and propulsive A/P GRFs in early and late stance, respectively, and total braking impulse), the total propulsive impulse was found to be unchanged between the two modes. In this study, we carefully controlled velocity and cadence while measuring overground and treadmill GRFs on the same surface. The similarity of the propulsive A/P GRFs under these conditions provides evidence that despite the common intuition that the movement of the treadmill belt surface changes the walking requirements (e.g., “support surface pulls the leg back” or “dictates the rate of hip extension”) there are no fundamental differences in the generation of propulsion between the two modes.
Although there was no significant difference in propulsion impulses between the gait modes, the braking impulse in treadmill walking was significantly lower than that in overground walking (Table 2). The decrease in the braking impulse corresponded to the decrease in early stance peak A/P GRF. Since the A/P GRF peak in late stance also decreased, it was expected that the propulsion impulse would similarly decrease. However, slight changes in the duration and shape of the propulsion curve offset the decrease in the peak GRF (Fig. 1). For example, subject 8 demonstrated an earlier onset of propulsive forces during treadmill walking, while subject 4 had the same onset of propulsive forces but had an increase in the magnitude prior to peak propulsion. Subjects 3 and 6 demonstrated a slightly longer duration of propulsive forces following peak propulsion during treadmill walking. Since all observed differences were relatively minor, it is believed that the mechanisms generating propulsion in normal (and pathological by implication) gait are comparable during overground and treadmill walking.
We believe this study demonstrates that the common intuition that the moving belt in treadmill walking leads to different propulsion requirements is incorrect. If the person walking on the treadmill does not generate the required propulsion for the belt speed, they will eventually be pushed off the back of the belt surface. Note that this will not be true in a clinical study if a person is allowed to use handrails (e.g., Harris-Love et al., 2004) or is in a harness that prevents backward translation with the treadmill belt. In each of these cases, these contacts with the environment can introduce external propulsive forces that maintain the person’s position on the belt surface.
Instrumented treadmills have the potential to significantly advance clinical gait analyses because of their ability to record many consecutive gait cycles and maintain a steady-state walking pattern at carefully controlled speeds. While there are subtle differences in A/P GRF between overground and treadmill gait, there are no fundamental differences in the propulsion generated when using a treadmill. Thus, despite concerns in the clinical literature, treadmill walking can be used to investigate the generation of propulsion in healthy and clinical populations (e.g., those with post-stroke hemiparesis).
Acknowledgments
This work was supported by NIH Grant R01 HD046820 and the Rehabilitation Research and Development Service of the Department of Veterans Affairs. The authors thank Dr. Chris Gregory and Mark Bowden for their help with data collection and Ryan Knight for his help with the data collection and processing.
Footnotes
Conflict of interest
None declared.
References
- Alton F, Baldey L, Caplan S, Morrissey MC. A kinematic comparison of overground and treadmill walking. Clinical Biomechanics (Bristol, Avon) 1998;13:434–440. doi: 10.1016/s0268-0033(98)00012-6. [DOI] [PubMed] [Google Scholar]
- Balasubramanian CK, Bowden MG, Neptune RR, Kautz SA. Relationship between step length asymmetry and walking performance in subjects with chronic hemiparesis. Archives of Physical Medicine and Rehabilitation. 2007;88:43–49. doi: 10.1016/j.apmr.2006.10.004. [DOI] [PubMed] [Google Scholar]
- Bayat R, Barbeau H, Lamontagne A. Speed and temporal-distance adaptations during treadmill and overground walking following stroke. Neurorehabilitation Neural Repair. 2005;19:115–124. doi: 10.1177/1545968305275286. [DOI] [PubMed] [Google Scholar]
- Boda WL, Tapp W, Findley TF. Biomechanical comparison of treadmill and overground walking. Eighth Biennial Conference, Canadian Society for Biomechanics; Calgary. 1994. [Google Scholar]
- Bowden MG, Balasubramanian CK, Neptune RR, Kautz SA. Anterior-posterior ground reaction forces as a measure of paretic leg contribution in hemiparetic walking. Stroke. 2006;37:872–876. doi: 10.1161/01.STR.0000204063.75779.8d. [DOI] [PubMed] [Google Scholar]
- Gottschall JS, Kram R. Ground reaction forces during downhill and uphill running. Journal of Biomechanics. 2005;38:445–452. doi: 10.1016/j.jbiomech.2004.04.023. [DOI] [PubMed] [Google Scholar]
- Harris-Love ML, Macko RF, Whitall J, Forrester LW. Improved hemiparetic muscle activation in treadmill versus overground walking. Neurorehabilitation and Neural Repair. 2004;18:154–160. doi: 10.1177/0888439004267678. [DOI] [PubMed] [Google Scholar]
- Masani K, Kouzaki M, Fukunaga T. Variability of ground reaction forces during treadmill walking. Journal of Applied Physiology. 2002;92:1885–1890. doi: 10.1152/japplphysiol.00969.2000. [DOI] [PubMed] [Google Scholar]
- Murray MP, Spurr GB, Sepic SB, Gardner GM, Mollinger LA. Treadmill vs. floor walking: kinematics, electromyogram, and heart rate. Journal of Applied Physiology. 1985;59:87–91. doi: 10.1152/jappl.1985.59.1.87. [DOI] [PubMed] [Google Scholar]
- Riley PO, Paolini G, Della Croce U, Paylo KW, Kerrigan DC. A kinematic and kinetic comparison of overground and treadmill walking in healthy subjects. Gait and Posture. 2007;26:17–24. doi: 10.1016/j.gaitpost.2006.07.003. [DOI] [PubMed] [Google Scholar]
- Strathy GM, Chao EY, Laughman RK. Changes in knee function associated with treadmill ambulation. Journal of Biomechanics. 1983;16:517–522. doi: 10.1016/0021-9290(83)90066-0. [DOI] [PubMed] [Google Scholar]
- Turns LJ, Neptune RR, Kautz SA. Relationships between muscle activity and anterior-posterior ground reaction forces in hemiparetic walking. Archives of Physical Medicine and Rehabilitation. 2007;88:1127–1135. doi: 10.1016/j.apmr.2007.05.027. [DOI] [PMC free article] [PubMed] [Google Scholar]