

Abstract
When accepting a parcel from another person, we are able to use information about that person’s movement to estimate in advance the weight of the parcel, that is, to judge its weight from observed action. Perceptual weight judgment provides a powerful method to study our interpretation of other people’s actions, but it is not known what sources of information are used in judging weight. We have manipulated full form videos to obtain precise control of the perceived kinematics of a box lifting action, and use this technique to explore the kinematic cues that affect weight judgment. We find that observers rely most on the duration of the lifting movement to judge weight, and make less use of the durations of the grasp phase, when the box is first gripped, or the place phase, when the box is put down. These findings can be compared to the kinematics of natural box lifting behaviour, where we find that the duration of the grasp component is the best predictor of true box weight. The lack of accord between the optimal cues predicted by the natural behaviour and the cues actually used in the perceptual task has implications for our understanding of action observation in terms of a motor simulation. The differences between perceptual and motor behaviour are evidence against a strong version of the motor simulation hypothesis.
Introduction
In our interactions with other people, we are able to interpret and often anticipate their actions in a seemingly effortless fashion. For example, when accepting a parcel from another person, we use information about that person’s movement to judge in advance the weight of the parcel. Moreover, we develop a conscious awareness of action perception at an early age as revealed when one child fools another about the weight of a parcel. Neuroscience has recently begun to focus on action understanding as a foundation for human social interaction (Gallese et al. 2004), and an increasing number of experiments have examined different aspects of action observation. In many situations, both the actions of the agent and the identities and affordances of the objects in the agent’s environment provide many clues about the agent’s goals and intentions. It has also been suggested that observers might use their own motor system to simulate observed actions and thus enhance their understanding (Gallese and Goldman 1998).
In natural environments there are many different possible sources of information that an observer could use to make perceptual judgements about actions. Experimentally, one approach to study action perception has been to use impoverished stimuli. For example, point-light displays pioneered by Johansson (1973) have shown that actions can be easily recognised from movies where only points of light attached to the actor’s joints are visible. The ability to distinguish biological from non-biological motion and to identify a range of characteristics of human biological motion such as gender (Kozlowski and Cutting 1977) and identity (Cutting and Kozlowski 1977) suggests that the human visual system is particularly efficient at processing visual information related to the motion of con-specifics. The point-light approach has the advantage in that the motion information in the stimulus can be precisely controlled and even computer generated (Jokisch and Troje 2003). However, a limitation is that the stimuli are sparse and do not capture the normal visual input that is available when watching the motion of others.
An alternative is to use video clips of actors which have a richer representation of movement, but the parameters of the movement are often difficult to manipulate and control experimentally. Here, we avoid this problem by using high speed video clips in which we can resample the frames so as to control the durations of different movement phases independently, effectively time-warping the movements. We chose a task in which an observer is asked to judge the weight of an object lifted by an actor. Previous studies have examined this task; in particular, Bingham (1987) and Shim and Carlton (1997) studied weight judgement by the observation of lifting large boxes from the floor and suggested that velocity information may contribute to weight judgement. These studies had only limited means of manipulating the kinematics of the actor. For example, Shim and Carlton (1997) asked the actor explicitly to control his kinematics and thus deceive the observer. However, recent evidence suggests that deceptive lifts may be perceived in a different manner than true lifts. (Grezes et al. 2004).
The lifting task we employed has a number of attractive features. First, it is a naturalistic task as we frequently estimate the weight of objects passed to us during everyday interactions with others. Indeed, participants find the task natural but not trivial (Runeson and Frykholm 1981, 1983). Second, responses can be quantified on a continuous scale. Third, as participants are able to perform the task from watching point-light displays, it is clear that kinematic information about the movement of the actor must be important for the judgement. Thus, it is particularly appropriate for our experimental approach in which we manipulate movement kinematics. Fourth, this task is composed of a series of clearly delineated phases including reach, grasp, lift and place. The focus of this study was to manipulate the durations of these different phases to determine the effects on action observation.
The current study has two primary aims. The first is to define the kinematic cues used in the perceptual weight judgement task, and thus to provide a robust basis for using weight judgement stimuli in more complex studies of human action understanding. The second is to test whether observers are sensitive to the changes in phase durations that occur naturally when objects of different weights are lifted.
It has recently been suggested that the motor system might simulate observed actions in order to understand them (Gallese et al. 1996; Gallese and Goldman 1998; Rizzolatti and Craighero 2004). Psychophysical evidence for motor simulation has been found using a weight judgement task (Hamilton et al. 2004), where lifting a box was shown to systematically bias the perception of the weight of a box lifted by an actor. Little is known about how this simulation might occur. A strong motor simulation hypothesis might predict that every kinematic aspect of an observed movement is taken into account in a simulation and is interpreted with respect to the motor behaviour in the same task. This account would predict a close correspondence between the kinematic cues used in observation and those that vary with motor behaviour. However, a weaker simulation account might suggest just an activation of motor systems in response to the observation of action, with a motor representation of the goals of a movement but without precise simulation of observed kinematics. For example, the theory of event coding (Hommel et al. 2001) proposes that actions are represented with the perceptual events which they cause, but the kinematic details of the action need not be encoded. This account would not predict such a close link between performed and observed actions. Finally, a purely visual hypothesis would predict that motor simulation does not have any role in perceptual weight judgement, and that the task can be accomplished through an entirely visual analysis. Detailed visual and cognitive mechanisms for interpreting the actions of others have been proposed (Runeson and Frykholm 1983).
Most previous studies of perceptual weight judgement have shown an actor’s whole body as the person lifts a large box from the floor to a table (Bingham 1987; Grezes et al. 2004; Runeson and Frykholm 1981; Shim and Carlton 1997). However, we were interested in limiting the number of kinematic variables available to the participants, and in studying an action where the motor behaviour is well defined, so we chose to use videos where only an actor’s hand is seen lifting a small box (see Fig. 1a, d). Recent data shows that normal participants can assess weight from similar stimuli with reasonable accuracy (Hamilton et al. 2004).
Fig. 1.
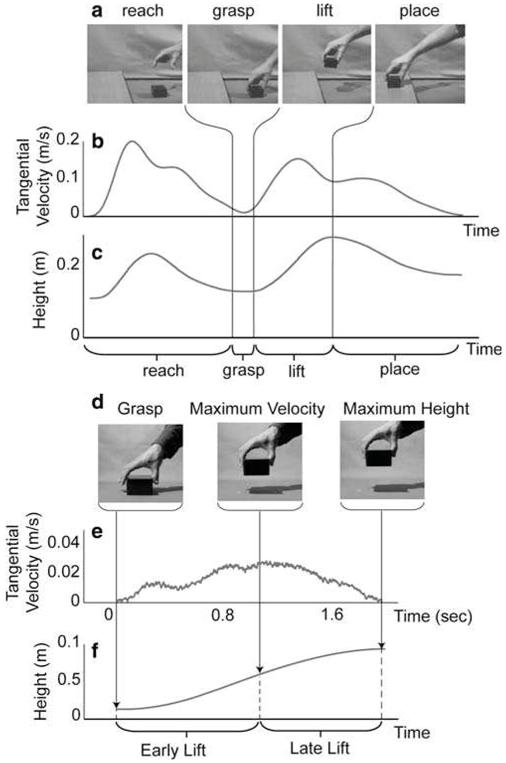
a Frames from video set A, used in experiments 2, 3 and 5. The reach, grasp, lift and place phases are shown. Lift and place together make up the transport phase. b Tangential velocity of the wrist over the movement, vertical lines indicate how the movement was segmented into phases. c Height of the wrist above the table over the movement. d Frames from video set B, used in experiment 4. e Tangential velocity of the wrist over the movement. f Height of the wrist above the table over the movement
We report data from one motor experiment and four perceptual experiments. The first investigated the motor behaviour of participants lifting boxes of different weights to quantify how the duration of different phases of the lifting task vary with the object weight. The remaining four experiments examine how people judge weight by observation. Experiment 2 tests the effect of varying the reach, grasp and transport (lift and place combined) phase durations of a lifting movement on weight judgement. Experiments 3, 4 and 5 examine the influence of the kinematics of lifting in greater detail; the influence of the early and late phases of lifting; and of the grasp and place phases of the movement. In all these experiments, we demonstrate that the duration of the start of the lift phase of movement is the key determinant of perceived weight, but that other phases also contribute.
Experiment 1: box lifting behaviour
Methods
Ten right-handed participants gave their informed consent to take part in a box lifting task. Five boxes with an identical appearance but different weights (50, 250, 450, 650 and 850 g) were prepared. Infrared markers were placed on the index finger, thumb and wrist (1 cm radially from the second metacarpal bone) of each participant and the positions of the markers were recorded with an Optotrak (model 3020, http://www.ndigitial.com) at 250 Hz throughout each trial. On each trial, the participant’s view of the table was obscured and a box was placed on the table in front of the participant. When the table and the box were revealed, the participant was asked to lift the box with a right-handed precision grip and place it on a shelf approximately 30 cm beyond and 10 cm above the starting point. The five boxes were presented ten times each in a random order, so that the participants were not aware of the weight of the box before lifting it. A random presentation order was used because it has been previously shown that when subjects repeatedly lift a box of a known weight, the kinematics of both the lift (Gordon et al. 1991; Johansson and Westling 1988) and reach (Atkeson and Hollerbach 1985) phases tend towards a standard profile regardless of box weight. Randomising the box weight maximises the distinctness of the kinematic patterns and matches the variation in kinematics that we introduce in the videos used in the following experiments.
For the purpose of data analysis, the kinematic trajectory was divided into four phases: reach, grasp, lift and place, as illustrated in Fig. 1a. Reach was defined as the time from the start of the movement until the index finger velocity fell below 0.01 m/s as the hand approached the object. Grasp was defined as the time when the index finger velocity remained below 0.01 m/s as the hand contacted and began to grip the box. Lift lasted from the end of grasp to the peak height, and place from peak height until the finger velocity dropped below 0.03 m/s as the box was put on the shelf. Phase duration was used as a summary measure, because the movement path differed little between trials, so the duration correlated highly with velocity in the lift and place phases, and was a more informative measure in the grasp phase. Multiple and simple regressions were used to determine how much of the variance in weight could be accounted for by each phase and thus which was the most reliable cue to box weight. Separate analysis was performed for each participant.
Results and discussion
Reach duration was not analysed in the motor data, because subjects were unaware of the box weight prior to contact and, therefore, it could not affect the reach duration. Across the participants, the mean r2 for the multiple regression of grasp, lift and place phase durations onto true box weight was 0.45 (range 0.15-0.62) and was significant (P<0.05) for nine out of ten participants. Separate regressions were used for each phase duration (grasp, lift and place) to examine the extent to which the object weight can be predicted from each phase alone. The average r2 for grasp, lift and place were 0.34, 0.19 and 0.08 and the r2 values were significant (P<0.05) in ten, nine and three out of ten participants, respectively. Significant correlations were observed between the grasp and lift durations (average r=0.48, P<0.05 in nine out of ten participants), but not between place duration and either grip (average r=0.19, P<0.05 in one out of ten participants) or lift (average r=0.19, P<0.05 in two out of ten participants) duration. Partial correlations were used to determine if grasp and lift durations were independently influenced by box weight, and this analysis revealed that 20% of the variance in box weight could be predicted from grasp duration but only 5.6% from lift duration, while 14% was predicted by a combination of factors. This suggests that grasp duration independently provides a reliable cue to box weight, while lift duration provides some information but has less predictive power. In contrast, the place duration is uninformative. Thus, box lifting behaviour predicts that the optimal observer should make use of the grasp, and perhaps, also the lift phases, to determine the weight of the lifted box. The remaining four experiments examine what cues people actually use in this task.
Experiments 2-5: general methods
Stimulus generation
In order to create video clips for use in the weight judgement task, an actor was asked to lift various boxes and the movements were filmed with a high speed digital video camera (Photron Europe, Buckinghamshire, UK, http://www.photron.com) at 250 fps and a resolution of 512×480 pixels. During filming, the kinematic behaviour of the actor was also recorded at 250 Hz with up to three infrared markers placed on the index finger, wrist (1 cm radially from the second metacarpal bone) and thumb (Optotrak 3020, http://www.ndigitial.com). Video and kinematic data were synchronised by a common ‘on’ switch. All the boxes lifted were visually identical, and different weights were created by putting lead shot inside each box as needed. Each lift was filmed twice, and during the filming, the actor was unaware of the weight of the box until he lifted each from the table. For experiments 2, 3 and 5, five boxes weighing 50, 250, 450, 650 and 850 g were lifted and placed on a shelf by the actor; these videos are set A. For Experiment 4, three boxes weighing 110, 960 and 1,810 g were lifted 10 cm into the air by the actor; these videos are set B.
The video stream recorded was segmented into four phases: reach, grasp, lift and place, on the basis of both the tangential velocity of the optotrak markers and examination of the video (Fig. 1). Reach was defined as beginning when the hand first appeared on the screen and ending when the tangential index finger velocity fell below 0.01 m/s. Grasp was defined as the time when the index finger’s velocity dropped below 0.01 m/s as the hand approached the object. Lift lasted from the end of grasp to the peak height, and place from peak height until the finger velocity dropped below 0.03 m/s as the box was put on the shelf.
The kinematics of the video was manipulated in all the experiments by specifying the desired duration of each movement phase. Frames were taken from each phase of the high speed video at regular intervals, such that each phase would have the desired duration when played at 25 fps. Altering the duration of a movement scales the velocity and acceleration while maintaining the path of the movement. Phase durations are expressed as percentages of a standard duration, which is based on the durations recorded when the actor lifted the middle weight box. Standard phase durations for stimulus set A were 1,100 ms for reach, 176 ms for grasp, 876 ms for lift and 1,004 ms for place. For stimulus set B, the standard lift duration was 1,808 ms.
Experimental procedure
Naïve participants aged between 18 and 30 were recruited and they gave their informed consent in accordance with the requirements of the local ethics committee. They were first given the opportunity to lift two identical looking boxes, with weights of 150 and 750 g, and were told that the weights were 25 U and 75 U, respectively. Once the participants had familiarised themselves with the weights, they were shown videos of the actor lifting weights, and asked to assess the weight of the actor’s box on a scale from 1 to 100, using the lifted boxes as references.
Video stimuli were presented using the Cogent toolbox running in Matlab 6.5, at their original resolution of 512×480 pixels at 25 frames per second, on a 19 in CRT display running with a screen refresh of 100 Hz. The computer used to display stimuli was sufficiently fast to ensure no frame dropout during experiments. Participants responded using the keyboard after each clip, and were not under time pressure to make their response.
Experiment 2: which phase influences weight judgement most?
Methods
This experiment manipulated the durations of three movement phases: reach, grasp and transport (defined as the combination of the lift and place phases) from stimulus set A (Fig. 1a-c). Standard durations for these phases were set to be 1,100 ms for reach, 176 ms for grasp and 1,880 ms for transport, and the five clips showing a complete lift and place movement were resampled to have these phase durations. Reach and transport durations were set to 50, 100 or 150% of standard. Because the standard grasp duration was short, pilot work suggested that small manipulations of grasp duration were not noticed by participants; so, grasp duration was set to 10, 100 or 500% of standard. Using a factorial design, this gives 27 stimuli (3 reach durations×3 grasp durations×3 transport durations) generated from each of the five box lifting movements recorded, giving a total of 135 unique videos.
Eight naïve participants were asked to view these videos in a randomised order and to judge the weight of the box in the clip, as described above. Each participant saw each stimulus twice, giving ten judgements for each cell in the factorial design.
Results
The mean response of each participant in each condition was calculated, and the results submitted to a repeated-measures ANOVA with three factors (reach duration, grasp duration and place duration) each with three levels. Significant main effects of grasp duration, F(2,14)=5.790, P=0.015, and transport duration, F(2,14)=6.921, P=0.008, were found, but there was no significant effect of reach duration, F(2,14)=1.51, P=0.25). These effects are illustrated in Fig. 2a-c. There was also a significant interaction between grasp and transport phases, as illustrated in Fig. 2d. Specifically, if the transport phase is short (50%), then the grasp duration has a large influence, but when the transport phase is longer, the grasp duration has less influence on judgements. This interaction might indicate that grasp duration is a more important visual cue when transport is less salient (i.e. too short and less information about the weight is contained in the lift-place kinematics).
Fig. 2.

Results of experiment 2. Mean weight judgement across participants with standard error bars are shown. a The main effect of reach, which was not significant. b The main effect of grasp revealed that a longer grasp phase lead to heavier weight judgements. c The main effect of transport revealed that a longer transport phase lead to heavier weight judgements. d The grasp-transport interaction revealed that changes in grasp duration had a greater impact when transport duration was short
This first experiment demonstrates that observers are sensitive to kinematic cues and can use these to make judgements on weight. The relative importance of the cues is indicated by the magnitude of the effects. Reach duration had no effect on perceptual weight judgement, while transport duration had the strongest effect and seems to be the principle cue used. Grasp duration had a smaller effect for a larger manipulation, suggesting that it is relatively unimportant. There are several possible explanations for the differential use of these cues. Subjects might rely on the transport phase more because it is the last in the sequence, and as such the most prominent and easy to remember. Alternatively, they might use knowledge of the statistics of their own motor behaviour to evaluate the reliabilities of the observed cues. Finally, a purely visual analysis might make the most use of the transport phase because it is the longest part of the movement. Further experiments were used to distinguish these possibilities.
Experiment 3: the role of lift and place duration
Methods
Experiment 2 suggests that the transport phase is a salient cue to box weight. However, transport is a long phase which could contain several cues in the lifting and placing phases. To investigate this, we again used stimulus set A (Fig. 1a), and manipulated the duration of the lift and place phases independently. The standard lift duration was 876 ms and the standard place duration was 1,004 ms, and these were resampled to give lift and place durations of 75, 90, 100, 110 and 125% of the standard, while reach and grasp phase durations where held constant at 100% of the standard. This resulted in a 5×5 factorial design with factors lift duration and place duration for each of the five original movies, giving a total of 125 stimuli. Eight naïve participants took part, and were given the same instructions as for Experiment 2. Each participant saw each video twice, in a random order, giving a total of 250 weight judgements per participant.
Data was analysed by multiple regression of the judged weight onto the lift and place durations and by semi-partial correlations of these factors, which give the unique variance that can be attributed to each factor (Howell 2001). Separate analyses were carried out for each subject. To visualise the data, the overall mean response to each lift or place duration was calculated and plotted with the least squares fit line over all participants.
Results
Mean responses and the least squares fits to the mean judgement for each lift and place duration are illustrated in Fig. 3a, which shows a steep slope for the lift duration and a flat line for the place duration. When the data was analysed separately for each participant, the mean r2 of the multiple regression was 0.280 (range 0.013-0.54) and the regression was significant (P<0.001) in seven out of the eight participants. Semi-partial correlations, indicating the proportion of variance uniquely accounted for by a given independent variable, revealed that, on average, 28% of the variance in judged weight could be explained by lift duration and less than 1% by place duration. This difference was significant in a paired t test, t(7)=4.23, P=0.0039. The correlation between lift duration and judged weight was significant at P<0.001 in seven of the eight participants, but the correlation between place duration and judged weight was significant in only two participants, at P<0.05. A repeated measures ANOVA on the data from all subjects was also performed to check for interactions between influence of lift and place duration. No reliable interaction was found, but the ANOVA confirmed a significant influence of lift duration on weight judgement, F(4,28)=27, P<0.001. These results suggest that motion information contained in the lifting phase contributes significantly to the judgement of weight and the place phase does not.
Fig. 3.

Results of experiments 3, 4 and 5. Mean weight judgement across participants with standard error bars are shown as points, and best fit regression lines are shown in the same colour. a Experiment 3 revealed that lift duration has a reliable linear effect on weight judgement (dark line) and place duration has no effect (pale line). b Experiment 4 revealed that both early and late lift durations influence weight judgement, but that the effect of early lift is stronger. c Experiment 5 revealed that very early lift influences weight judgement but grasp duration does not
Experiment 4: differential effect of initial versus late lifting
Methods
Experiment 3 demonstrated that lift duration is an important cue to weight, but we further wished to distinguish early and late phases of the lift. Using stimulus set B, we defined early lift as the accelerating phase from lift-off to maximum velocity and late lift as the decelerating phase from maximum velocity to a static hold (see Fig. 1d). This gave a standard early lift duration of 1,240 ms and a standard late lift duration of 568 ms, for a total movement duration of 1,808 ms. The standard durations were resampled to give a 5×5 factorial design with factors early lift and late lift, each with five levels (75, 90, 100, 110 and 125). Eight naïve participants took part, and were given the same instructions as Experiment 2. Each participant saw each video eight times in a random order, giving a total of 200 judgements per participant. Data were analysed as in Experiment 3, that is, multiple and semi-partial regressions were calculated for each participant, and least squares fits on the mean data were used only for visualisation.
Results
Mean responses and the least squares fits are illustrated in Fig. 3b which shows a steeper slope for the early lift duration than for the late lift duration. When the data were analysed separately for each participant, the mean r2 of the multiple regression was 0.12 (range 0.006-0.23) and the regression was significant (P<0.001) in six out of of the eight participants. Semi-partial correlations revealed that, on average, 10% of the variance in judged weight was due to early-lift duration and 2% to late-lift duration, and this difference was significant in a paired t test, t(7)=2.93, P=0.022. The correlation between early lift duration and judged weight was significant at P<0.001 in six of the eight participants, but the correlation between late lift duration and judged weight was only significant in two participants at P<0.05 and two more at P<0.001. These results indicate that participants make use of both the early and late parts of the lift phase in making their judgement, but rely more on the early lift phase.
Experiment 5: the role of grasp and very early lift
Methods
Experiment 2 suggested that not only lift, but also grasp duration can influence weight judgement. However, with only three levels of grasp over a wide range, it was not possible to determine the magnitude of this effect. To investigate the role of grasp fully, the videos illustrated in Fig. 1a were resampled to give five grasp durations (33, 66, 100, 133 and 166% of standard). In this case, the standard grasp duration (100%) was 125 ms, so the first 125 ms of the lift phase was defined as ‘very early lift’ and was manipulated by the same amount (33, 66, 100, 133 and 166%) in a factorial design. This gives a set of 25 videos in which grasp and early lift are resampled in the same fashion. Eight naïve participants took part, and were given the same instructions as Experiment 2. Each participant saw each video four times in a random order, giving a total of 100 judgements per person. Three participants were unable to do the task at a level above chance, and three additional participants were recruited to replace them. Results were analysed as in Experiments 3 and 4.
Results
Mean responses and the least squares fits are illustrated in Fig. 3c, which shows a steep slope for the very early lift phase and a shallow slope for the grasp phase. In all 11 participants, the mean r2 of the multiple regression was 0.17 (range 0.0035-0.44) and the regression failed to reach significance (P<0.05) in three participants. Semi-partial correlations revealed that, on average, 2% of the variance in judged weight was due to grasp duration and 15% to early lift duration, and this difference was significant in a paired t test, t(10)=3.32, P=0.0092. The correlation between very early lift duration and judged weight was significant at P<0.01 in 9 of the 11 participants, but the correlation between grasp duration and judged weight was only significant in two participants at P<0.05. These results suggest that participants do not use grasp information to make their judgement, but are able to use lift information even when only a small part of the start of the lifting movement is varied.
General discussion
Kinematic cues used in perceptual weight judgement
In a series of experiments, we have investigated in detail the kinematic features which participants use to judge the weight of a box lifted by another person. Our results indicate that the duration of the early part of the lift movement contributes most to the observer’s judgement of the weight of the lifted box, but that grasp and later phases of lift can also contribute. The durations of the reach and place phases of the movement do not seem to contribute to weight judgement. Experiments 3 and 4 rule out the possibility that better memory for later phases of the movement influences cue use, because these experiments showed that the early part of the lift phase is used more than the later part. In all four perceptual weight judgement experiments, lift was the most strongly used cue to judge box weight, and other cues seem to make only a minor contribution. Only the duration of each phase was explicitly controlled in the manipulation of the video stimuli, but with a constant path, changes to duration have clear consequences for lift velocity. It is likely that velocity can be extracted more readily than duration, in particular when the movement phases have no explicit beginning and ending. In fact, if participants adopted the heuristic strategy of assuming that the weight was due to the mean velocity over the whole of the movement, they would fail to make use of the grasp phase of the movement where velocity is zero, as observed. Though this simple heuristic could not account for the observation that participants make more use of early lift than of late lift (Experiment 4), it remains likely that velocity, in particular during early lift, is the most important cue to box weight.
These results concur with the previous data of Bingham (1987) and Shim and Carlton (1997), who also suggest that lift velocity is an important cue for weight judgement. Those studies used point-light stimuli where a whole person was seen lifting a large box, in contrast to the current investigation where only a hand lifting a small box was seen. The finding that lift is important in both these cases suggests that this may be a general principle for weight judgement. The current study also makes use of much more carefully controlled stimuli than previous experiments, and thus we are able to demonstrate that participants are capable of reliably discriminating subtle changes in the kinematics of observed movements and interpreting those in terms of characteristics of objects in the world. In particular, participants seem to focus on the lift phase of the movement in making their judgements.
Motor behaviour in box lifting
In our experiments, perceived weight was influenced more by the lift phase of movement than the grasp phase. This can be contrasted with the results of Experiment 1, which demonstrated that in actually lifting, the duration of the grasp phase is a better predictor of weight than is the lift phase. Given this discrepancy, it is useful to consider the validity and generalisability of the results of Experiment 1. In particular, the kinematic data revealed a correlation between the durations of the grasp and lift phases of the movement, which suggests that the division of the kinematic profiles is not clear cut. This correlation is not surprising, because when a subject lifts a box of unknown weight, it takes approximately 100 ms for the motor system to detect and respond to the weight. Thus, it is reasonable to expect the durations of both the grasp and lift phases to be influenced by weight, with the strongest effect seen on the first of these adjoining phases. By the time the transport phase occurs, the motor system has had time to adjust its output based on sensory feedback, and no differences are seen between the different weights. Despite the close relationship between grasp and early lift, the partial correlations indicated that grasp duration is independently a better predictor of box weight than either lift duration or the combination of all durations. This finding agrees with the results of Weir et al. (1991) demonstrating that grasp duration varies systematically with box weight.
Overall, we suggest that grasp duration is the most reliable for box weight, and thus predict that an optimal observer should use grasp duration as a cue to box weight in preference to lift duration. The finding that observers fail to use grasp duration fully suggests that weight judgement performance based on visual perception may not optimally exploit the statistics of human motor behaviour. Why do observers appear to use lift duration information rather than the potentially more informative grasp information?
One possibility is that the grasp duration is too short to enable the perceptual system to distinguish different time intervals accurately. That is, the temporal resolution of the visual perceptual system in this instance may not be sufficient to make use of grasp phase duration. A second, and related, possibility is related to the pattern of the observer’s gaze. When observing block lifting, the observer’s gaze naturally shifts from the object to the location to which the object will be moved at around the time of contact between the hand and the object (Flanagan and Johansson 2003). Thus, grasp duration may not be used in perception because central vision is shifted during this period. A third possibility is that the perceptual system is primarily sensitive to motion cues to make weight judgements. As the fingers move little during the grasp phase, there are no salient motion cues that could be used to judge weight. In contrast, in the lift phase there are highly salient motion cues. Note that we have shown that even the very first part of the lift phase—similar in duration to the grasp phase—is used effectively to judge weight. This adds support to the idea that motion cues are important in weight judgement.
Motor simulation in weight judgement
The discovery of a discrepancy between the kinematic information present in box lifting and the kinematic cues used in perceptual weight judgement has implications for our understanding of the role of motor simulation in action observation. The motor simulation hypothesis proposes that actions are understood by simulating the observed movement in the motor system of the observer (Gallese et al. 1996; Gallese and Goldman 1998; Rizzolatti and Craighero 2004). A strong version of this hypothesis would suggest that perceptual judgement about action takes place in the motor system and thus has access to all the information present in the motor system. The failure of participants to use grasp information, despite the availability of this cue, suggests that only limited motor information may be able to contribute to weight judgement. This is evidence against the strong motor simulation hypothesis.
This leaves two possible mechanisms which could account for perceptual weight judgement performance: a purely perceptual mechanism (e.g. Runeson and Frykholm 1983) and a weaker form of the motor simulation hypothesis, suggesting that the judgement task has access to some but not all of the motor system or its output. Though the data presented in the current paper cannot distinguish between these, there is extensive fMRI evidence for the involvement of motor regions of the brain in the perception of other people’s action (Decety and Grezes 1999; Grafton et al. 1996), and recent psychophysical data demonstrates that motor activity can influence perceptual weight judgement (Hamilton et al. 2004). These data suggest at least some degree of motor involvement in the perceptual task, and thus the weaker version of the motor simulation hypothesis seems most plausible.
This weak version of the simulation hypothesis is also compatible with other theories of action understanding, in particular, the ideomotor theory, which proposes that actions are encoded in terms of their perceptual effects (Hommel et al. 2001; Fagioli et al. 2005). Support for this idea is found in work suggesting the primacy of goal representations in both humans and apes. In particular, when children are asked to copy an adult’s movement, the child sometimes reaches for the same goal as an adult but using a different arm, that is, a different kinematic pattern (Bekkering et al. 2000). Apes also seem to emulate goals, rather than the means used to achieve a goal (Tomasello and Call 1997). These data suggest that perceptual and motor information may be matched at the level of goals, and that the details of kinematic trajectories are relatively unimportant. Thus, weight judgement might not use a precise simulation of the kinematic parameters of the observed action, but this does not rule out a common coding system for the act of lifting a box and the observation of the same action.
Conclusion
We have developed a technique for obtaining precise control of the kinematics of observed movements, while preserving form information, and used this method to investigate the kinematic cues which contribute to perceptual weight judgement. The data indicate that the early part of the lifting phase is the dominant cue, with a small effect on later lift and grasp duration, whereas reach duration had no effect on judged weight. These results are contrasted with motor behaviour for box lifting, where the duration of the grasp phase was the best predictor of true box weight. The differences between perceptual and motor behaviour are evidences against a strong version of the motor simulation hypothesis for weight judgement, but can be reconciled with a weaker version of this hypothesis.
Acknowledgements
This work was funded by the McDonnell Foundation, the Wellcome Trust and Riken Institute, Japan. We would like to thank James Ingram for computer support.
Contributor Information
A. Hamilton, Dartmouth College, 6162 Moore Hall, Hanover, NH 03755, USA
D. W. Joyce, Sobell Department of Motor Neuroscience, Institute of Neurology, University College London, London, UK
R. Flanagan, Department of Psychology, Queen’s University Kingston, Kingston, ON, Canada
C. D. Frith, Wellcome Department Cognitive Neurology, University College London, London, UK
D. M. Wolpert, Sobell Department of Motor Neuroscience, Institute of Neurology, University College London, London, UK
References
- Atkeson CG, Hollerbach JM. Kinematic features of unrestrained vertical arm movements. J Neurosci. 1985;5:2318–2330. doi: 10.1523/JNEUROSCI.05-09-02318.1985. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Bekkering H, Wohlschlager A, Gattis M. Imitation of gestures in children is goal-directed. Q J Exp Psychol A. 2000;53:153–164. doi: 10.1080/713755872. [DOI] [PubMed] [Google Scholar]
- Bingham GP. Kinematic form and scaling: further investigations on the visual perception of lifted weight. J Exp Psychol Hum Percept Perform. 1987;13:155–177. doi: 10.1037//0096-1523.13.2.155. [DOI] [PubMed] [Google Scholar]
- Cutting JE, Kozlowski LT. Recognizing friends by their walk: gait perception without familiarity cues. Bull Psychon Soc. 1977;9:353–356. [Google Scholar]
- Decety J, Grezes J. Neural mechanisms subserving the perception of human actions. Trends Cogn Sci. 1999;3:172–178. doi: 10.1016/s1364-6613(99)01312-1. [DOI] [PubMed] [Google Scholar]
- Fagioli S, Hommel B, Schubotz RI. Intentional control of attention: action planning primes action-related stimulus dimensions. Psychol Res. 2005 doi: 10.1007/s00426-005-0033-3. (this issue) [DOI] [PubMed] [Google Scholar]
- Flanagan JR, Johansson RS. Action plans used in action observation. Nature. 2003;424:769–771. doi: 10.1038/nature01861. [DOI] [PubMed] [Google Scholar]
- Gallese V, Goldman A. Mirror neurons and the simulation theory of mind-reading. Trends Cogn Sci. 1998;2:493–501. doi: 10.1016/s1364-6613(98)01262-5. [DOI] [PubMed] [Google Scholar]
- Gallese V, Fadiga L, Fogassi L, Rizzolatti G. Action recognition in the premotor cortex. Brain. 1996;119:593–609. doi: 10.1093/brain/119.2.593. [DOI] [PubMed] [Google Scholar]
- Gallese V, Keysers C, Rizzolatti G. A unifying view of the basis of social cognition. Trends Cogn Sci. 2004;8:396–403. doi: 10.1016/j.tics.2004.07.002. [DOI] [PubMed] [Google Scholar]
- Gordon AM, Forssberg H, Johansson RS, Westling G. Visual size cues in the programming of manipulative forces during precision grip. Exp Brain Res. 1991;83:477–482. doi: 10.1007/BF00229824. [DOI] [PubMed] [Google Scholar]
- Grafton ST, Arbib MA, Fadiga L, Rizzolatti G. Localization of grasp representations in humans by positron emission tomography. 2. Observation compared with imagination. Exp Brain Res. 1996;112:103–111. doi: 10.1007/BF00227183. [DOI] [PubMed] [Google Scholar]
- Grezes J, Frith CD, Passingham RE. Inferring false beliefs from the actions of oneself and others: an fmri study. Neuroimage. 2004;21:744–750. doi: 10.1016/S1053-8119(03)00665-7. [DOI] [PubMed] [Google Scholar]
- Hamilton A, Wolpert DM, Frith U. Your own action influences how you perceive another person’s action. Curr Biol. 2004;14:493–498. doi: 10.1016/j.cub.2004.03.007. [DOI] [PubMed] [Google Scholar]
- Hommel B, Musseler J, Aschersleben G, Prinz W. The theory of event coding (TEC): a framework for perception and action planning. Behav Brain Sci. 2001;24:849–878. doi: 10.1017/s0140525x01000103. [DOI] [PubMed] [Google Scholar]
- Howell D. Statistical methods for psychology. 5th edn. Pacific Grove; Duxbury: 2001. [Google Scholar]
- Johansson G. Visual perception of biological motion and a model for its analysis. Percept Psychophys. 1973;14:201–211. [Google Scholar]
- Johansson RS, Westling G. Coordinated isometric muscle commands adequately and erroneously programmed for the weight during lifting task with precision grip. Exp Brain Res. 1988;71:59–71. doi: 10.1007/BF00247522. [DOI] [PubMed] [Google Scholar]
- Jokisch D, Troje NF. Biological motion as a cue for the perception of size. J Vis. 2003;3:252–264. doi: 10.1167/3.4.1. [DOI] [PubMed] [Google Scholar]
- Kozlowski LT, Cutting JE. Recognizing the sex of a walker from a dynamic point-light display. Percept Psychophys. 1977;21:575–580. [Google Scholar]
- Rizzolatti G, Craighero L. The mirror-neuron system. Annu Rev Neurosci. 2004;27:169–192. doi: 10.1146/annurev.neuro.27.070203.144230. [DOI] [PubMed] [Google Scholar]
- Runeson S, Frykholm G. Kinematic specification of dynamics as an informational basis for person-and-action perception: expectation, gender recognition, and deceptive intention. J Exp Psychol Gen. 1983;112:585–615. [Google Scholar]
- Runeson S, Frykholm G. Visual perception of lifted weight. J Exp Psychol Hum Percept Perform. 1981;7:733–740. doi: 10.1037//0096-1523.7.4.733. [DOI] [PubMed] [Google Scholar]
- Shim J, Carlton LG. Perception of kinematic characteristics in the motion of lifted weight. J Motor Behav. 1997;29:131–146. doi: 10.1080/00222899709600828. [DOI] [PubMed] [Google Scholar]
- Tomasello M, Call J. Primate cognition. Oxford University Press; Oxford: 1997. [Google Scholar]
- Weir PL, MacKenzie CL, Marteniuk RG, Cargoe SL, Frazer MB. The effects of object weight on the kinematics of prehension. J Motor Behav. 1991;23:192–204. doi: 10.1080/00222895.1991.10118362. [DOI] [PubMed] [Google Scholar]