

Abstract
A person's ability to transfer the acquired improvements in the control of center of mass (COM) state stability to slips induced in everyday conditions can have profound theoretical and practical implications for fall prevention. This study investigated the extent to which such generalization could take place. A training group (n = 8) initially experienced 24 right-side slips in blocked-and-random order (from the 1st unannounced, novel slip, S-1 to the last, S-24) resulting from release of a low-friction moveable platform in walking. They then experienced a single unannounced slip while walking on an oil-lubricated vinyl floor surface (V-T). A control group (n = 8) received only one unannounced slip on the same slippery floor (V-C). Results demonstrated that the incidence of balance loss and fall on V-T was comparable to that on S-24. In both trials, fall and balance-loss incidence was significantly reduced in comparison with that on S-1 or on V-C, resulting from significant improvements in the COM state stability. The observed generalization indicates that the control of COM stability can be optimally acquired to accommodate alterations in environmental constraints, and it may be broadly coded and easily modifiable within the CNS. Because of such mechanisms, it is possible that the locomotor-balance skills acquired with the aid of low-friction moveable platforms can translate into resisting falls encountered in daily living.
INTRODUCTION
The ability of humans to generalize adaptive control of their whole-body motion state (that is, the displacement and velocity of its center of mass) in the presence of changing environmental and task constraints is fundamental to maintaining mobility and stability. There is considerable evidence pertaining to generalization of motor skills measured in terms of the CNS's ability to take information acquired from one situation and apply it appropriately to other, similar situations in different “contexts,” whereby such context can mean different task objectives, different environment constraints or different effectors/limbs. Studies of upper limb tasks have demonstrated generalization of the sensorimotor adaptation between the two arms (interlimb generalization) (Bagesteiro and Sainburg 2005; Cunningham and Welch 1994; Dizio and Lackner 1995; Gordon et al. 1994), between different task objectives while using the same arm (intralimb generalization) (Abeele and Bock 2003; Conditt et al. 1997; Morton et al. 2001; Shadmehr and Moussavi 2000), or between different environmental constraints (Imamizu et al. 2007; Welch et al. 1993). Yet, it is unclear whether such generalization also exists in the cyclic (or rhythmic) movements involving the locomotor-posture control system.
Recent empirical evidence has shown generalization of the aftereffects of modified-stance adaptation (i.e., stepping in place on a rotating disk) to other postural tasks such as gait (Earhart et al. 2001) and hopping (Earhart et al. 2002b). Following such adaptation, subjects, when asked to walk forward or backward on a straight line, exhibited a curved (counter clockwise) trajectory in both directions of walking that was heavily influenced by the training on the rotating disc. The adaptation also generalized to the opposite limb (Earhart et al. 2002a). Similarly, interlimb transfer has been demonstrated for an obstacle avoidance task, where subjects demonstrated no difference in optimal foot clearance between the last training trial and the first transfer trial. In addition, subjects also adopted similar lower-limb joint angle trajectories on both the training and transfer limbs on these trials (van Hedel et al. 2002). In contrast, little interlimb transfer has been observed for the adaptation of walking acquired with a split-belt treadmill training (Choi and Bastian 2007). Along the same lines, the “observed aftereffect” of stepping onto a moving sled with the training limb has persisted in only a few subjects when they stepped on the sled with the untrained limb (Reynolds and Bronstein 2003a).
It is unclear whether the aforementioned findings could apply to fall prevention, such that the fall-resisting skills acquired under one condition could be transferred to another (untrained) situation. There is evidence of transfer in the control of one's center of mass (COM) state stability (Yang et al. 2007, 2008) acquired adaptively in response to repeated-slip training on the right side when a slip was unexpectedly induced on the left side (Bhatt and Pai 2008). The transfer, which was evident in improved feedforward control of the stability (Bhatt et al. 2006a; Pai et al. 2003), was by itself probably insufficient to improve the reactive control of stability and to significantly reduced incidence of backward balance loss. Feedforward adjustments can nevertheless influence landing characteristics of the gait pattern (e.g., flat footed with flexed knee), that would then affect reactive control of the slipping velocity and hence postslip stability (Bhatt et al. 2006a). Together, these adaptive changes were sufficient to enable subjects to successfully avert actual fall, indicated by a reduced incidence of fall on the first left slip as compared with the first right slip (Bhatt and Pai 2008). When the participants were told the precise timing of slip on the untrained left side in a similar paradigm, however, the transfer of stability control was sufficiently improved to reduce incidence of balance loss (Bhatt and Pai 2008). Although knowledge of impending slip by itself did not assist a novice person to resist falling backward (Bhatt and Pai 2008), it clearly improved the interlimb generalization of the acquired motor skills (Bhatt and Pai 2008). Further, the effect of transfer is also evident in accelerating the acquisition rate of the same motor skill with the previously untrained limb (Bhatt and Pai 2008).
This emerging evidence on generalization could be accounted for if one assumes that the CNS updates its internal representation of these COM state stability limits from the perturbation-originated sensorimotor feedback to improve the control of the BOS kinematics under uncertain environmental conditions (e.g., slip vs. nonslip, or right vs. left slip) (Bhatt et al. 2006a; Pai et al. 2003). Internal representation is presumably a necessary component in the CNS's predictive (or feedforward) control of this individual's actions/behavior, and it is an internal reflection about external constraints experienced in the past. Based on computational neuroscience theories, the CNS has the capacity to internally emulate the dynamic behavior of its motor system in the planning, execution, and learning processes. Accordingly, predictive control would be optimized such that the control scheme and its motor commands (motor program) can produce action that reduces error (Wolpert and Ghahramani 2000) even when external constraints have been altered (Pai et al. 2003). Understandably, during early phases in the learning process to resist fall, such motor program is either premature or nonexisting. The sensory information on movement error resulting from the perturbation is likely transmitted to processing areas of the brain for updating the internal representation and applied subsequently for action modification and error reduction. It is only later in this process, the CNS may shift from relying on sensory integration for error correction to preprogramming a global COM-state trajectory, which would be optimally stable under altered or uncertain environmental contexts (Pai and Iqbal 1999; Pai et al. 2003).
It is similarly logical to further assume that the CNS would be inclined to seek the generalization of the acquired internal representation to resist fall induced under different yet similar conditions. One plausible way would be to develop a global control scheme (generalized motor program) that is robust in its original form whereby it can also be rapidly and easily refined according to the changes in environmental constraints. However, little understanding exists on how close such resemblance has to be for resisting slip-related fall. Previous findings on such issues are inconsistent. For example, Reynolds and Bronstein (2003a) have demonstrated persistence of the postural “aftereffect” of the acquired adaptation (increased trunk anterior lean) only under the “context of adaptation,” i.e., the “sled condition.” Transfer of obstacle avoidance skills acquired while walking on a level surface has been observed when the surface inclination was changed to downhill walking (Lam and Dietz 2004). The positive transfer that was demonstrated in the obstacle avoidance task could result from the similarities in properties between the altered downhill and the original level walking surfaces and the tasks being identical in nature (Wood and Ging 1991). The limited transfer of the aftereffect alternatively was attributed a low to no “expectancy” of the perturbed context while walking over-ground resulting probably from an evidently “perceived difference” in the contexts. Because of such lack of consensus, it is unclear whether the fall-resisting skills acquired via repeated-slip training conducted with the aid of laboratory instrumentation would transfer to a similar, yet untrained, everyday living situation of slips on icy or oily walking surfaces—an issue that can have broad and significant practical implications.
The purpose of this study was therefore to determine whether such transfer indeed existed. Subjects were trained using a combination of blocked and random practice, consisting of 24 slips induced via computer-controlled release of a moveable platform (Bhatt et al. 2006b) before an unannounced slip was introduced by the contamination of a vinyl floor with an oil-based lubricant. A control group experienced only a single unannounced slip on the vinyl floor. The moveable platform slips constrain the lateral movement of the foot in comparison with the oil-contaminated vinyl surface allowing the unconstrained foot to move freely in all planar directions and along its anatomical axes. Although the initial recovery responses may be affected by these differences in the environmental constraints (Troy and Grabiner 2006), it is highly likely that the adaptive control mechanisms acquired to accommodate forward displacement on the moveable platform could still be generalized to slips on an oily surface, due to the similar characteristics of forward slips. We therefore hypothesized the training group to have significantly greater COM state stability (pre- and postslip) resulting from better control of slip disturbance (i.e., less displacement and lower velocity) that would lead to a lower incidence of balance loss on the last slip trial (S-24) in comparison to the first, unannounced, novel slip trial (S-1) on the moveable platform. We expected such a training effect to be transferred on the vinyl floor, such that these performance variables on the first, unannounced vinyl slip (V-T) would be comparable to those of S-24 and would be significantly better than those of the control group (V-C).
METHODS
Subjects
Sixteen healthy young subjects (26.5 ± 5.4 yr, 7 males) participated in the study after being screened for neurological, musculoskeletal, cardiopulmonary, and other systemic disorders and selected drug usage. The subjects were randomly divided into two groups: the training-transfer group (n = 8, 4 males), who underwent repeated-slip training on the moveable platform and then slipped once an on oil-contaminated vinyl floor; and the control group (n = 8, 3 males), who experienced only a single slip on an oil-contaminated vinyl floor. The test of leg dominance, conducted using a set of four simple tasks (Beling et al. 1998), revealed all subjects to be right dominant. Prior to their participation, all subjects gave informed consent as approved by the Institutional Review Board.
Moveable platform setup
The experimental setup consisted of a pair of devices, each consisting of a moveable platform attached to a stationary metal beam track (2.50 × 0.30 × 0.21 m) via linear bearings and anchored to the top of two rectangular force plates (OR6-5-1000, AMTI, Newton, MA) bolted to the ground. These devices were embedded in a 7-m walkway side-by-side and hidden by the stationary decoy platforms surrounding them. The moveable plate could either be locked for regular walking trials or released to simulate a unilateral or bilateral slip (Bhatt and Pai 2008; Yang and Pai 2007). The release mechanism was controlled by the computer, which unlocked the moveable platforms at the beginning of each slip trial without the knowledge of the subject. Once released, the moveable platforms are free to slide along the linear bearings (μ < 0.05) and can be locked into the end position if the maximum distance (1.5 m on the right, and 0.90 m on the left) is reached. The left top plate was locked and served as a decoy plate to camouflage the sliding plate. The ground reaction forces on this instrumented section of the walkway were recorded in all experimental conditions. The subjects wore their own athletic shoes and a full-body safety harness attached to a manually driven trolley on a ceiling-mounted I-beam by a pair of shock-absorbing dynamic ropes through a load cell that registered any applied force.
Slippery floor setup
A custom-designed floor was constructed by laying down multiple vinyl sheets over the same 7-m laboratory walkway covering an area of 6 × 1.5 m. These sheets were cut to individually fit over the moveable platforms (which were kept locked in position), the surrounding decoy platforms, and the rest of the walkway, and they could be quickly assembled or disassembled. A section of this floor was oil-contaminated to induce the slips. To deliberately induce the vinyl floor slips at a different location than the platform slips, the evenly contaminated section started at the distal end of the right moveable platform and continued for 0.75 m in length along the right track, to approximate the average displacement of the moveable platform slips. Before inducing the slips the shoes were covered with a low-friction smooth plastic sheet (for details, see following text). This attempt would yield a similar shoe-surface interface for all subjects in the vinyl-slip group and hence a similar coefficient of friction (μ < 0.1).
Training protocol
The subjects were told that they would be walking for a block of trials at their preferred regular speed and manner and that they may or may not experience a slip. They were also told that in case of a slip, they should try to recover their balance and continue walking. At the beginning of the experiment, the subjects performed 10 regular walking trials at their self-selected speed. Without revealing the purpose, the experimenter would adjust each subject's starting position so that his future slipping (right) foot would land entirely on the right moveable plate at touchdown. All subjects were able to take at least three steps from their initial standing position before stepping on the moveable platform. On the 11th trial, a slip was induced without prior warning or practice on the right side. The subjects were not aware of which trial or where on the walkway the slip would occur. After exposure to the first unannounced slip, the subjects were told to continue walking in “the same manner” as on the previous trial and that they might be exposed to slipping again. The training paradigm had 37 trials, consisting of a block of eight repeated slips, a block of 3 nonslip trials, another block of eight slips, followed by the second block of 3 nonslip trials, and a final block of 8 slip trials that were randomly mixed with 7 nonslip trials. All the repeated slips were induced on the training (right) side. This paradigm was chosen based on the previous studies demonstrating significant motor learning using this protocol (Bhatt et al. 2006b). Previous studies have established that five to eight repeated slips are sufficient for adaptive improvements in balance loss (Bhatt and Pai 2005; Bhatt et al. 2006a; Pavol et al. 2002b). The “overlearning” with the extra trials, consisting of a combination of blocked and random practice was designed to further enhance generalization (Schmidt and Lee 1999), as it had already proved effective in aiding retention (Bhatt et al. 2006b).
Transfer protocol
Every subject took a “rest break” for ∼5 min after the slip training on the moveable platform. The experimenter used this break to quickly assemble the new floor, while the subjects faced away from the walkway and were engaged in conversation with another experimenter. The sole of their shoe was covered with a smooth plastic sheet to ensure that every subject experienced the same shoe-floor friction interface. First, the subjects were asked to place their shoe on the flat plastic sheet (11 × 8 in) on the ground. Once ensured that the entire sole was in contact with the sheet, the ends of the sheet were wrapped around the top of the shoe and secured with duct tape. The plastic sheet is thin and therefore does little to alter the general contour of the shoe. Once the vinyl floor was assembled, subjects were asked to walk on the floor at their regular walking speed for three baseline trials on which they were informed a slip would not occur. Thereafter subjects were again informed that there was a possibility of a slip on any of the future trials. After each walking trial, the subject returned to the initial position, facing away from the walkway while an experimenter would mimic the sound of applying the lubricant. These steps and dim lighting were taken to reduce the cue when the contamination was actually applied. After walking for five trials, the subjects experienced only one slip on the right side, on the sixth postbaseline trial. Thus subjects walked for a total of nine trials on the vinyl floor.
Control protocol
The subjects in the control group experienced only a single slip on the contaminated vinyl floor. The experimental setup, the instructions, and the protocol were otherwise identical to that experienced by the training group when its subjects were tested on the vinyl floor.
Data collection and reduction
A set of 24 full-body light reflective markers was attached to the bilateral upper and lower extremities and the torso, while one marker was attached to each moveable platform. Marker coordinates were recorded at 120 Hz using a six-camera motion-capture system (Motion Analysis, Santa Rosa, CA). Marker displacement data were low-pass filtered at marker-specific optimal cut-off frequencies (range: 4.5–9 Hz) using a recursive second-order Butterworth Filter (Winter 2005). Force plate and harness load cell data were collected at 600 Hz using a 64-channel, 16-bit A/D converter. The ground reaction force and motion data were time synchronized at the time of data collection.
Neuromechanical control of COM state stability
The COM position and its velocity were computed from the kinematic data using known gender-dependent segmental parameter information in a 13-segment representation of the body (de Leva 1996; Pavol et al. 2002a). The position of the COM in the anteroposterior direction was expressed relative to the rear of the base of support (BOS) of the most recent foot to touchdown and normalized to foot length. In the present study, we used the heel marker of the slipping foot to approximate its BOS, hence the displacement and velocity of the two were used interchangeably. The COM velocity in the anteroposterior direction was expressed relative to the velocity of the BOS and normalized as a dimensionless fraction of  (McMahon 1984), where g is the acceleration due to gravity and h is height of the subject. Stability was assessed through comparison of the COM state (i.e., its position and velocity) with the previously published threshold values for backward balance loss under slip conditions (Pai and Iqbal 1999). Stability was defined as the shortest distance from this predicted boundary for backward balance loss to the instantaneous COM state (Bhatt et al. 2005; Pai et al. 2003). The model simulation predicts that backward loss of balance must occur for COM states below the threshold (i.e., stability < 0). Thus a COM state further below the threshold represents an increased likelihood of backward loss of balance under slipping conditions (Bhatt et al. 2005; Pai et al. 2003). Conversely, more positive values indicate greater stability against backward balance loss.
(McMahon 1984), where g is the acceleration due to gravity and h is height of the subject. Stability was assessed through comparison of the COM state (i.e., its position and velocity) with the previously published threshold values for backward balance loss under slip conditions (Pai and Iqbal 1999). Stability was defined as the shortest distance from this predicted boundary for backward balance loss to the instantaneous COM state (Bhatt et al. 2005; Pai et al. 2003). The model simulation predicts that backward loss of balance must occur for COM states below the threshold (i.e., stability < 0). Thus a COM state further below the threshold represents an increased likelihood of backward loss of balance under slipping conditions (Bhatt et al. 2005; Pai et al. 2003). Conversely, more positive values indicate greater stability against backward balance loss.
Although the mediolateral aspect of slip kinematics was inspected, the analyses were primarily centered on the anteroposterior direction. The instants of step liftoff and touchdown were identified from the vertical ground reaction forces. Preslip stability was measured and noted at touchdown of the leading/slipping limb. Postslip stability was recorded at liftoff of the contralateral limb. The time between touchdown of the slipping limb to liftoff of the contralateral limb was on average 180 ms. Previous results have indicated that postslip stability obtained at contralateral liftoff is the major determinant of recovery outcome (loss of balance vs. no loss of balance) (Bhatt and Pai 2005; Bhatt et al. 2006b; Yang et al. 2008); hence this time instant was chosen.
Slip characteristics
To further understand the contributing factors for adaptive changes in the COM state stability, we analyzed the changes in the horizontal BOS displacement and velocity between the moveable platform and vinyl floor conditions (Bhatt and Pai 2005; Bhatt et al. 2006a). These values were obtained from the heel marker of the slipping limb at the postslip instance of liftoff of the contralateral limb.
To characterize the similarities and differences between the moveable platform and the vinyl floor slips, the peak (maximum) horizontal and lateral heel displacement and velocity were also obtained, and these peaks occurred after liftoff for all trials (Bhatt et al. 2005). Similarly the peaks for the measured anteroposterior (AP), mediolateral (ML), and vertical ground reaction forces from the force plates were obtained. Subsequently, we obtained the peak coefficient of friction from touchdown of the slipping limb to contralateral limb touchdown, calculated as the ratio of the AP (or ML) force to the vertical force.
Slip outcome
The outcome of slip was classified as a fall if the average force on the safety harness exceeded 4.5% body weight over any 1-s period after the slip onset or the hip midpoint descended <15% body height of its minimum height during normal walking trials (Pavol and Pai 2007). Otherwise, the trial was classified as a recovery. Each fall was verified with video recordings of performance. When the contralateral limb landed posterior to the slipping heel with negative values in postslip step length during the slip, the recovery trials were classified as loss of balance trials with protective stepping. Conversely trials with the contralateral limb landing anterior to the sliding heel and positive postslip step length were classified as “no loss of balance” trials in which protective stepping was not needed, and forward progression was not disrupted (Bhatt et al. 2005).
Statistics
To test for differences in slip characteristics between the moveable platform and the vinyl floor slips, the peak horizontal and lateral displacement and velocity, the peak horizontal, lateral, and vertical ground reaction forces, and the horizontal and lateral coefficient of friction were compared between the first moveable platform slip of the training group (S-1) and the first and only vinyl floor slip of the control group. Further, a cross-correlation between groups was performed on the averaged (across subjects of each group) time history profile of each of these variables from touchdown of the slipping foot to contralateral foot touchdown. To examine and monitor changes in the “regular,” unperturbed gait following repeated slips, paired t-test were performed on stability at touchdown of the right foot and contralateral liftoff on the following trials: the unperturbed trial before the first platform slip (pretraining), the last posttraining unperturbed trial (the trial before S-24), the third baseline unperturbed trial on the vinyl floor, and the unperturbed trial before the vinyl slip.
To test for adaptation and transfer across trials within the training group, the Kruksal Wallis test and a repeated-measures ANCOVA were performed, respectively, on the nonparametric (incidence of fall and backward loss of balance) and parametric (pre- and postslip stability, heel displacement and velocity at liftoff) variables. The trials included were: the first (S-1) and last (S-8) slips of the first slip block, the first trial of the second slip block (S-9 or 1st reslip) and its last trial (S-16), the first trial of the mixed block (S-17 or 2nd reslip) and its last trial (S-24), and the transfer slip trial on the vinyl floor (V-T). Significant main effects were followed up with planned comparisons between consecutive trials using the Wilcoxon signed-rank tests for nonparametric and paired t-test for parametric variables. To specifically test for transfer effects, S-1 was compared with S-24 and V-T. Gait velocity was added as the covariate to control for any confounding effect. The Mann Whitney U test and independent t-test were performed to test differences, respectively, in the preceding mentioned nonparametric and parametric variables between vinyl slips experienced by the training (V-T) and control groups (V-C). There was an added level of control in the design of the study when we compared the response to the initial novel slip under different environmental constraints (i.e., between the initial platform slip of the training group, S-1, and the vinyl slip of the control group, V-C). If there is no difference between S-1 and V-C in the aforementioned nonparametric and parametric comparisons, the results will further strengthen the case for generalization because of the equivalency between groups at this first slip trial. A significance level of 0.05 was used for all the other analyses after adjusting for multiple comparisons. Analyses were performed using SPSS (Chicago, IL).
RESULTS
The results indicated that although overall the slip characteristics were comparable along the anteroposterior direction on the first novel slip on both the surface types, i.e., the platform and the vinyl floor (Fig. 1, left), they were very different in the mediolateral direction (Fig. 1, right). The coefficient of the vinyl slips was significantly higher than platform slips in the AP plane (P < 0.01; Table 1). There was no difference in horizontal peak velocity, peak anteriorposterior and vertical ground reaction forces between the two surfaces. However, there was a significant difference in the lateral peak displacement and velocity, and peak mediolateral ground reaction force (Table 1).
FIG. 1.
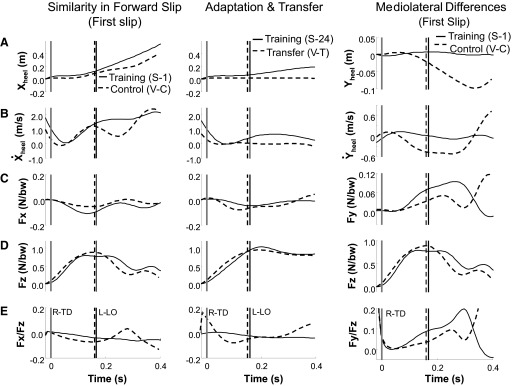
Left: kinematic and kinetic characteristics of a typical response to the st, unannounced, novel slip induced by the release of the moveable platform (solid line, S-1, for the subjects in the training group) and that resulting from slippery vinyl floor (dashed line, V-C, for subjects in the control group). Middle: the training effects of the same person (left) were transferred from the last (24th, S-24) slip to the 1st vinyl slip (V-T). Right: the mediolateral constraint from the linear bearing of the moveable platform was removed in the “free” slip on vinyl floor in the same trials as the right panel. The S-1 and V-C trials resulted in loss of balance, whereas the response in S-24 and V-T trials (middle) led to successful recovery. Shown for the left and middle panels from top to bottom are the representative time histories of the following variables: A, anterior-posterior displacement of the slipping heel (xheel); B, its horizontal velocity (X̄heel), the ground reaction force normalized to the body weight (bw in kg.m.s-2) in the (C) anteriorposterior (Fx) and (D) vertical directions (Fz), and (E) the ratio Fx/Fz or Fy/Fz, which cannot exceed surface friction coefficient. This ratio can increase, however, if the surface coefficient of friction changes due to the distribution of oil-based lubricant applied on the vinyl surface as seen during later part of the trial. Shown in the right panel are the same variables but in the mediolateral direction. The vertical thick gray line indicates the time of slipping (right) limb touchdown (R-TD), which approximates slip onset. The thin-solid and thin-dash vertical lines, respectively, indicate the time of contralateral liftoff for the S-1 (or S-24) and V-C (or V-T), respectively. Note positive values in A and B for the left and middle panels indicate forward heel displacement, whereas for the right panel, it indicates heel displacement to the left. Positive ground reaction force is in anterior (Fx), medial (to the left; Fy), or upward (Fz) direction.
TABLE 1.
Comparison of slip characteristics from moveable platform and contaminated vinyl floor
| Anteroposterior |
Mediolateral | |||
|---|---|---|---|---|
| Moveable Platform | Contaminated Floor | Moveable Platform | Contaminated Floor | |
| Peak displacement, m | 0.03 ± 0.08 | 0.02 ± 0.07* | <0.001 ± 0.001 | −0.05 ± 0.02** |
| Peak velocity, m | 1.81 ± 0.49 | 1.38 ± 0.43 | −0.08 ± 0.04 | −0.55 ± 0.21** |
| Peak shear force, N/bw | −0.07 ± 0.02 | −0.06 ± 0.03 | 0.06 ± 0.02 | 0.05 ± 0.01* |
| Coefficient of friction | 0.04 ± 0.01 | 0.08 ± 0.03* | ∝ | 0.08 ± 0.03 |
Coefficient of friction is operationally defined as the maximum ratio of horizontal/vertical components of the ground reaction force derived during the corresponding slip displacement. This coefficient is infinite in mediolateral direction for the platform because it is not allowed to have displacement although there might still be a minor amount of displacement between the heel and its top due to the rubber padding material in between. Because the moveable platform's mediolateral displacement is restrained, its coefficient of friction should therefore be infinite. Positive is anterior, medial (to the left), or upward direction in this coordinate system. The peaks were obtained between the touchdown of the slipping foot to touchdown of the contralateral recovery foot. N, Newtons; bw, body weight in kg.m.s−2.
, 0.01 < P < 0.05.
, P < 0.001.
As expected, the motor training on the moveable platform led to a reduction in the backward loss of balance (BLOB) incidence from 100% on the first unannounced slip (S-1) to 10% by the eight slip (S-8) of the first block (P < 0.01). However, the incidence of balance increased to 35% on the first reslip trial (9th slip, S-9, P < 0.05 between S-8 and S-9). This incidence reduced rapidly, and by the last trial of this second slip block, S-16, it was only 5% (P < 0.05). There was no significant change in incidence of balance loss between S-16 and the second reslip trial, S-17 (P > 0.05) and thereafter (P < 0.01 between S-17 and S-24). Fall incidence reduced from 38% (3/8) to 0% from the first to the last slips (P < 0.05 between S-1 and S-24).
These improvements in slip outcome resulted from the improvements made in both pre- and postslip stabilities, from the S-1 to S-24 [F(6, 42) = 7.34 and 18.76, respectively, P < 0.01 for both]. There was a significant increase in pre- and postslip stabilities between S-1 and S-8 (P < 0.05) with a slight decrease from S-8 to S-9 (P < 0.05). With more repeated slips, there was a subsequent increase by S-16 (P < 0.05) with no change thereafter (between S-16 and S-17 and S-17 and S-24, for both variables). There was a similar trend in improving the control of the BOS kinematics, where reducing the slip displacement and velocity was associated with the improved COM state stability. Both heel displacement and velocity at contralateral limb liftoff reduced significantly from S-1 to S-8 (P < 0.05) with a slight increase in S-9 (P < 0.05), which decreased again by S-16 (P < 0.05) and remained there till the last slip (P > 0.05 between S-16 and S-17 and S-17 and S-24, for both variables at liftoff). Gait velocity did not affect pre- or postslip stabilities (P > 0.05).
The subjects were able to transfer the motor training effects when they were first exposed, without any warning, to the slippery vinyl surface (V-T). None of the subjects experienced a fall on V-T (P < 0.05 between V-T and S-1; Fig. 2A). All but one subject were successful in preventing a loss of balance on the slip (12.5%, P < 0.05 between V-T and S1 and P > 0.05 between V-T and S-24; Fig. 2B). Such improved recovery outcomes clearly differed from those of the control group, V-C, the outcomes of which were comparable to the first unannounced moveable platform slip, S-1, in the training group. Specifically, all subjects in the both groups experienced balance loss on S-1 and V-C, and their fall incidence (3/8, 38% for V-C) was also identical (P > 0.05 between V-C and S-1; Fig. 2).
FIG. 2.

The mean incidence of fall (A) and loss of balance (B) for the training group (•) on the 1st (S-1) and the last (S-24) slip induced by the release of the low-friction moveable platform and on the 1st slip on the slippery vinyl floor. Also shown is the fall and balance loss incidence for control group (□) on the 1st vinyl slip. Significant comparisons at P < 0.05 are indicated (*).
The transfer of acquired stability control could be attributed to the improved recovery outcomes. The pre- and postslip stabilities on V-T were significantly greater in comparison to S-1 (P < 0.05) with no significant difference in both the stabilities between V-T and S-24 (P > 0.05; Fig. 3, A and B). There was no difference in pre- and postslip stabilities between the vinyl slip experienced by the control group (V-C) and the first moveable platform slip by the training group, S-1 (P > 0.05 for both). The control group's pre- and postslip stabilities were both significantly lower than those of the training group (P < 0.05 for both variables). There was no significant difference in stability between the third baseline walking trial on the vinyl floor and the first vinyl slip at right touchdown (P > 0.05). There was a significant difference in stability at touchdown and contralateral liftoff between this pretraining unperturbed walking trial and all the later unperturbed trials included in this analysis (P < 0.05), whereby no difference could be detected between these later trials (P > 0.05; Fig. 4).
FIG. 3.

The means ± SD of preslip (A) and postslip stability (B) for the training group (•) on the 1st (S-1) and the last (S-24) slip induced by the release of the low-friction moveable platform and the transfer slip on the slippery vinyl floor. Also shown is the stability for control group (□) on the first vinyl slip. Significant comparisons at P < 0.05 are indicated (*).
FIG. 4.

The means ± SD of stability at touchdown (a) of slipping/leading limb and liftoff of contralateral limb for the training group on the following trials: regular, unperturbed walking trial preceding the 1st platform slip (Reg), the first platform slip (S-1), the nonslip trial (i.e., trial 36) preceding the last training slip (NS), the last (i.e., 37) training slip (S-24), the regular, unperturbed walking vinyl baseline trial (Reg-VB), the regular, unperturbed walking vinyl trial preceding the vinyl slip (Reg-V) and the transfer vinyl slip (V-T). Note for the slip trials, the stability at touchdown and liftoff respectively equals preslip and postslip stability. For the vinyl baseline trials, subjects were explicitly informed that a slip would not occur. Significant comparisons at P < 0.05 are indicated (*). To maximize clarity, some significant differences are not indicated (e.g., Reg vs. Reg-VB and Reg vs. Reg-V are significant with (P < 0.05).
The transfer of improved stability control resulted from the transfer of improved BOS control on V-T. The heel displacement and velocity were significantly lower at contralateral liftoff on V-T compared with S-1 (P < 0.05, respectively) with no difference between V-T and S-24 (P > 0.05 for both displacement and velocity; Fig. 5, A and B). There was no difference in heel displacement and velocity at contralateral liftoff between the vinyl slip experienced by the control group and the first moveable platform slip by the training group (P > 0.05 for all variables). However, these variables were significantly greater for the control group than on the transfer vinyl slip for the training group (P < 0.05 between V-C and V-T for all variables; Fig. 5).
FIG. 5.

The means and (SD) of (a) anterior-posterior, slipping heel displacement (Xheel) and (b) its velocity (X̄heel) at postslip, contralataral limb liftoff. The training group's results (filled circles) were reported on the first (S-1), the last (S-24) moveable platform slips, and the transfer vinyl slip, together with those of the control group's vinyl slip (open square). Significant comparisons at P < 0.05 are indicated with an *.
DISCUSSION
Our results indicated that the fall-resisting skills acquired with repeated-slip training could indeed carry over from slips induced with moveable platform to slips induced on a slippery floor surface. As hypothesized, when subjects were exposed to the slippery floor for the first time after training, their incidence of balance loss and fall was significantly lower in comparison with those of the controls or their own first novel encounter with a slip. This resulted from a training-induced improvement in the control of the COM state relative to the BOS. Our findings thus lend support to the notion that the CNS is capable of generalizing the motor program acquired in one context to another altered, untrained environmental context, in responding to the same forward-slip induced to the same limb.
Adaptation to repeated slips
It is known that with proper training, humans are adaptable to sudden or unexpected changes in environmental constraints during a range of activities from standing to locomotion. In this adaptive process, the feedforward control underlying successful proactive adjustments, occurring before or in anticipation of perturbation onset and typically relying on previously acquired knowledge, can affect the movement outcomes in two different ways. First, feedforward control can alter posture and limb control prior to an encounter with an environmental hazard (Andres et al. 1991; Bhatt et al. 2006a; Cham and Redfern 2002; Marigold and Patla 2002; McIlroy and Maki 1993; Patla et al. 1991). For example, improved movement stability prior to the onset of perturbation can reduce or eliminate the need for a reactive response following onset of the perturbation (Pai et al. 2003). Second, feedforward control can modulate the feedback-control-related reactive response to the perturbation to increase the likelihood of success of this reactive response (Bhatt et al. 2006a; Marigold and Patla 2002; Pavol and Pai 2002b; Pavol et al. 2002b). Our results revealed that both mechanisms have been applied by the training group. The significant reduction in balance loss and fall incidence across these trials were attributed to the acquired feedforward and reactive control of stability, resulting from adaptive changes in gait pattern that could have led to reductions in heel displacement and velocity under low-friction conditions (Bhatt et al. 2006a). Such adaptive changes include a reduced step length and a flat-foot and flexed knee at heel strike during gait. These changes have been well established to occur with the same type of training and contributed to changes in stability and BOS control (Bhatt et al. 2006a,b; Heiden et al. 2006).
Similar to previous results employing the paradigm of “slip-nonslip-reslip,” the adaptation effects acquired in the first block of slips showed an immediate waning effect when the perturbation stops, i.e., on the first reslip after a nonslip block (Bhatt et al. 2006b; Pai et al. 2003; Pavol and Pai 2002b). Such a waning effect strongly suggests dependency of responses on context prediction, which the CNS is anticipating to experience (Vetter and Wolpert 2000). Such a waning process would be crucial for the CNS in search of an optimal motor program that can be sufficiently robust in controlling stability under uncertain environmental conditions. On re-exposure to the perturbation in the same session, this practice reaches a plateau or steady state (i.e., no trial-to-trial changes after the 2nd reslip or the 10th slip trial) (Bhatt et al. 2006b), for both pre- and postslip stabilities, leading to a rapid decrease in incidence of balance loss. Such a steady state is postulated to be achieved with appropriate perturbation-related sensorimotor experience that the individual encountered through exposure to repeated trials.
During this process, the CNS may shift from relying on context prediction for an upcoming situation (which is based on sensory feedback and error correction in the initial trials), to an emerging adaptive feedforward control during the later trials. Such control results in optimal preprogrammed strategies for prevention of balance loss and fall and a desirable COM-state trajectory that can be stable across different conditions ranging from nonslip to slip (Bhatt et al. 2006a) and perhaps to untrained slips on vinyl floor. This piece of empirical evidence supports the notion that such limits are mapped within the CNS for recovery from slips along with their correspondingly altered environmental constraints. At a global level, the body COM state must simultaneously satisfy a range of different constraints (Pai and Iqbal 1999), likely arising from unforeseeable abrupt changes in the friction coefficient of a walking surface, to increase the robustness of the subsequent response against a sudden and perhaps challenging onset of change in conditions. This strategy of predictive control, which also incorporates refined control of an individual's own BOS to neutralize the effect of the perturbation, would enable this person to maintain stability regardless of whether, where, and how a slip occurs; hence reducing reliance on the reactive recovery response. The significantly greater stability obtained at contralateral liftoff on the posttraining, unperturbed trial than the pretraining, unperturbed trial suggests an emerging predictive control for optimal motor programming. The lack of difference in the stability among the posttraining unperturbed trials further reinforces this notion.
Other cumulating evidence in literature also supports the argument that the CNS builds or updates internal representation of external constraints from immediate or past sensorimotor experience. For example, when the perturbation type (toes-up rotation to backward translation) changes, subjects still show some postural strategies appropriate to the previous perturbation (Horak and Nashner 1986), suggesting that the immediate experience from the perturbation must have lead to the CNS building a forward model of the appropriate movement strategy for the response (Horak and Nashner 1986; Nashner 1982). Similarly, when subjects expect a smaller perturbation but in fact experience a larger one, their responses still exhibit smaller magnitude (Horak et al. 1989; Timmann and Horak 1997) that may have been preselected from a repertoire before the perturbation onset. The presence of an anticipatory postural adjustment preceding compensatory stepping movements with repeated platform perturbations also indicates preprogramming within the CNS (McIlroy and Maki 1993). Last, subjects modifying their COM state even before experiencing the perturbation trial under uncertain slip or nonslip conditions indicates that individuals were developing optimal control schemes to match the internal representation of the different constraints to prevent a loss of balance (Pavol and Pai 2002a,b). This process could have laid down the foundation necessary for generalization of the required motor program.
Generalization from low-friction moveable platform to slippery floor
As demonstrated in our results, subjects were able to transfer the acquired strategy to an untrained environmental condition with different constraints, such as the vinyl floor slips induced on a different location. The vinyl floor had a different coefficient of friction (0.08) twice of that in platform slips (0.04) and allowed the foot to travel in a planar fashion with foot motion greater than one degree of freedom. In spite of these differences and indications of several other differences between platform slips and unconstrained surface slips (Troy and Grabiner 2006), our results indicated that subjects in training and control groups reacted in similar ways (as evident by no significant difference between S-24 and V-C) with the training group demonstrating an ability to transfer acquired skills to the untrained situation (no difference between S-1 and V-T). These results do support a more global scheme (or generalized motor program) for stability control that could be refined readily and optimally for different environmental constraints.
The evidence of transfer observed in the present study is similar to that demonstrated by Lam et al. (2004), in which study the subjects were able to transfer the motor skills acquired from obstacle-clearance training for level walking to that during inclined, “downhill” walking. The adaptive skills were preserved when the gravity-related external constraints were altered in “downhill” walking, similar to that after the mediolateral constraint inherent to the moveable platform was eliminated on slippery vinyl floor (Fig. 1, right). The transfer demonstrated in both cases could be explained based on the endpoint control theory proposed for skilled voluntary upper limb movements (Bosco et al. 2000; Shadmehr and Moussavi 2000). Following obstacle-clearance training, it might have been applied in the transfer of the control of heel vertical clearance relative to the obstacle. Following repeated-slip training, it might have been applied in the generalization of the control of the heel horizontal displacement and its velocity for recovery from a significant slip in the forward direction. This scheme may be able to simplify the control of complex locomotor-posture tasks just as it does in tasks involving upper limb movements (Bosco et al. 2000; Shadmehr and Moussavi 2000).
The extent of transfer between contexts could also be heavily influenced by the CNS' predictive ability and the implicit or explicit availability of contextual knowledge (Imamizu et al. 2007). Reynolds et al. (2003a) observed an “aftereffect” of the COM control acquired from forward platform perturbations when the platform (“sledge”) was stationary. Yet such aftereffect failed to appear when the subjects were made to walk on level surface (mimicking a stationary platform trial) after training on the sledge. This lack of generalization could be explained by the accurate contextual prediction by the CNS relating to a low or no “expectancy” of a perturbed context on a level surface allowing the CNS to switch the motor program back to one influencing natural gait (Imamizu et al. 2007).
On similar lines, the CNS' estimate of a high probability of encountering a slip trial and its adoption of a motor program optimal for different constraints, both could explain the observed posttraining changes in unperturbed walking behavior (Reg vs. Reg-V, P < 0.05, Fig. 4. The COM state stability on the baseline trials on the vinyl surface (where subjects were informed of the “nonslip” condition) was significantly greater than that on the pretraining, unperturbed walking trials and not different from the posttraining, unperturbed walking trial. Surprisingly, there was no effect of explicit instruction of context condition on stability as demonstrated by no significant difference in stability between the baseline trial (on which they were explicitly told to have no slip) and the unperturbed walking trial just before the vinyl slip (on which subjects had knowledge of possibility of slip). As previously demonstrated, the CNS's reliance on context prediction from the most recent experience for programming future actions supersedes explicit contextual knowledge (Heiden et al. 2006; Reynolds and Bronstein 2003b; Witney et al. 2001). These results, however, may also suggest that exposure to threatening perturbations can rapidly induce the posture and gait adaptations (Adkin et al. 2002; Heiden et al. 2006) that tend to persist from several hours to several days (Bhatt et al. 2006b), and often times even after clear instruction indicates no danger for a slip (e.g., as seen in Fig. 4 for Reg-VB).
Such persistence could have occurred probably by overtraining the slipping limb with the large number of slips induced on the same limb, leading to a dominant shift of weighing sensory input from the training side for developing predictive control commands. Such overtraining may favor intralimb transfer that involves changes in different context situations, such as from a more challenging, low coefficient of friction condition to a less challenging condition with a higher coefficient of friction. On the other hand, the same overtraining appeared to limit an interlimb transfer, perhaps due to the same over weighing of sensory input from the training side (Bhatt and Pai 2008). Advance knowledge of the forthcoming slip on the untrained side apparently can easily alter such over weighing leading to a transfer-related improved performance on the first slip exposure to that side. The same advanced knowledge given before such motor training could not achieve the same effect to alter novice response on the first slip exposure (Bhatt and Pai, 2008). Such evidence of differential influence on predictive control, originating from similar cognitive information, lends support to the previously postulated notion of downloading existing motor programs during transfer that is different from establishing them during acquisition (Bhatt and Pai 2008; Wang and Sainburg 2003).
In this paradigm, the intensity of perturbation was adaptively controlled by the participant rather than controlled by instrumentation. Thus sensory input from the perturbation would vary from trial to trial because of the changes in slip intensity that may make it difficult to interpret the adaptive role of sensory integration in absence of a clear stimulus-response relationship. Alternatively, the precisely instrumented control of perturbation intensity required for establishing such relationship could alter or even mask spontaneous adaptation in both feedforward and reactive control of slip kinematic characteristics. The present study was not designed to investigate such stimulus-response relationship in motor skill acquisition. Rather, the current paradigm was designed to investigate and to allow subjects to spontaneously augment their ability to control slip intensity with the implicit assumption that it may promote the transfer of their self defense skills appropriate in everyday living situations where slip characteristics are rarely controlled by an instrument with predetermined kinematic profile.
In summary, our findings have indicated that the CNS is capable of generalizing the neuromechanical responses acquired through motor training to different environmental contexts for resisting slip-induced falling, indicating the possible existence of a nonspatial, more global representation of stability limits. These findings provide evidence that the benefits of motor training using the slip-inducing platform could indeed carry over to resist fall on a slippery floor, resembling one that people encounter in everyday living.
GRANTS
This work was supported by National Institute on Aging Grant 2R01 AG-16727 to Y. C, Pai.
Acknowledgments
The authors thank T.-Y. Wang for assistance with data collection and Dr. Feng Yang for assistance with generating a figure.
The costs of publication of this article were defrayed in part by the payment of page charges. The article must therefore be hereby marked “advertisement” in accordance with 18 U.S.C. Section 1734 solely to indicate this fact.
REFERENCES
- Abeele and Bock 2003.Abeele S, Bock O. Transfer of sensorimotor adaptation between different movement categories. Exp Brain Res 148: 128–132, 2003. [DOI] [PubMed] [Google Scholar]
- Adkin et al. 2002.Adkin AL, Frank JS, Carpenter MG, Peysar GW. Fear of falling modifies anticipatory postural control. Exp Brain Res 143: 160–170, 2002. [DOI] [PubMed] [Google Scholar]
- Andres et al. 1991.Andres RO, Eng T, O′Connor D. Sagittal plane kinematics of walking onto a slippery surface and gait adaptations from continuous walking on slippery surfaces. The Slipping, Tripping, and Falling Accident Conference, London, 1991.
- Bagesteiro and Sainburg 2005.Bagesteiro LB, Sainburg RL. Interlimb transfer of load compensation during rapid elbow joint movements. Exp Brain Res 161: 155–165, 2005. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Beling et al. 1998.Beling J, Wolfe GA, Allen KA, Boyle JM. Lower extremity preference during gross and fine motor skills performed in sitting and standing postures.[see comment]. J Orthopaed Sports Phys Ther 28: 400–404, 1998. [DOI] [PubMed] [Google Scholar]
- Bhatt and Pai 2005.Bhatt T, Pai YC. Long-term retention of gait stability improvements. J Neurophysiol 94: 1971–1979, 2005. [DOI] [PubMed] [Google Scholar]
- Bhatt and Pai 2008.Bhatt T, Pai YC. Immediate and latent interlimb transfer of gait stability adaptation following repeated exposure to slips. J Mot Behav 40: 380–390, 2008. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Bhatt and Pai 2008.Bhatt T, Pai YC. Can observational training substitute motor training in preventing backward balance loss following an unexpected slip during walking? J Neurophysiol 99: 843–852, 2008. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Bhatt et al. 2005.Bhatt T, Wening JD, Pai YC. Influence of gait speed on stability: Recover from anterior slips and compensatory stepping. Gait Posture 21: 146–156, 2005. [DOI] [PubMed] [Google Scholar]
- Bhatt et al. 2006a.Bhatt T, Wening JD, Pai YC. Adaptive control of gait stability in reducing slip-related backward loss of balance. Exp Brain Res 170: 61–73, 2006a. [DOI] [PubMed] [Google Scholar]
- Bhatt et al. 2006b.Bhatt T, Wang E, Pai YC. Retention of adaptive control over varying intervals: prevention of slip-induced backward balance loss during gait. J Neurophysiol 95: 2913–2922, 2006b. [DOI] [PubMed] [Google Scholar]
- Bosco et al. 2000.Bosco G, Poppele RE, Eian J. Reference frames for spinal proprioception: limb endpoint based or joint-level based? J Neurophysiol 83: 2931–2945, 2000. [DOI] [PubMed] [Google Scholar]
- Cham and Redfern 2002.Cham R, Redfern MS. Changes in gait when anticipating slippery floors. Gait Posture 15: 159–171, 2002. [DOI] [PubMed] [Google Scholar]
- Choi and Bastian 2007.Choi JT, Bastian AJ. Adaptation reveals independent control networks for human walking.[see comment]. Nat Neurosci 10: 1055–1062, 2007. [DOI] [PubMed] [Google Scholar]
- Conditt et al. 1997.Conditt MA, Gandolfo F, Mussa-Ivaldi FA. The motor system does not learn the dynamics of the arm by rote memorization of past experience. J Neurophysiol 78: 554–560, 1997. [DOI] [PubMed] [Google Scholar]
- Cunningham and Welch 1994.Cunningham HA, Welch RB. Multiple concurrent visual-motor mappings: implications for models of adaptation. J Exp Psychol Hum Percept Perform 20: 987–999, 1994. [DOI] [PubMed] [Google Scholar]
- de Leva 1996.de Leva P Adjustments to Zatsiorsky-Seluyanov's segment inertia parameters. J Biomechan 29: 1223–1230, 1996. [DOI] [PubMed] [Google Scholar]
- Dizio and Lackner 1995.Dizio P, Lackner JR. Motor adaptation to Coriolis force perturbations of reaching movements: endpoint but not trajectory adaptation transfers to the nonexposed arm. J Neurophysiol 74: 1787–1792, 1995. [DOI] [PubMed] [Google Scholar]
- Earhart et al. 2001.Earhart GM, Jones GM, Horak FB, Block EW, Weber KD, Fletcher WA. Forward versus backward walking: transfer of podokinetic adaptation. J Neurophysiol 86: 1666–1670, 2001. [DOI] [PubMed] [Google Scholar]
- Earhart et al. 2002a.Earhart GM, Jones GM, Horak FB, Block EW, Weber KD, Fletcher WA. Podokinetic after-rotation following unilateral and bilateral podokinetic stimulation. J Neurophysiol 87: 1138–1141, 2002a. [DOI] [PubMed] [Google Scholar]
- Earhart et al. 2002b.Earhart GM, Melvill Jones G, Horak FB, Block EW, Weber KD, Fletcher WA. Transfer of podokinetic adaptation from stepping to hopping. J Neurophysiol 87: 1142–1144, 2002b. [DOI] [PubMed] [Google Scholar]
- Gordon et al. 1994.Gordon AM, Forssberg H, Iwasaki N. Formation and lateralization of internal representations underlying motor commands during precision grip. Neuropsychologia 32: 555–568, 1994. [DOI] [PubMed] [Google Scholar]
- Heiden et al. 2006.Heiden TL, Sanderson DJ, Inglis JT, Siegmund GP. Adaptations to normal human gait on potentially slippery surfaces: the effects of awareness and prior slip experience. Gait Posture 24: 237–246, 2006. [DOI] [PubMed] [Google Scholar]
- Horak et al. 1989.Horak FB, Diener HC, Nashner LM. Influence of central set on human postural responses. J Neurophysiol 62: 841–853, 1989. [DOI] [PubMed] [Google Scholar]
- Horak and Nashner 1986.Horak FB, Nashner LM. Central programming of postural movements: adaptation to altered support-surface configurations. J Neurophysiol 55: 1369–1381, 1986. [DOI] [PubMed] [Google Scholar]
- Imamizu et al. 2007.Imamizu H, Sugimoto N, Osu R, Tsutsui K, Sugiyama K, Wada Y, Kawato M. Explicit contextual information selectively contributes to predictive switching of internal models. Exp Brain Res 181: 395–408, 2007. [DOI] [PubMed] [Google Scholar]
- Lam and Dietz 2004.Lam T, Dietz V. Transfer of motor performance in an obstacle avoidance task to different walking conditions. J Neurophysiol 92: 2010–2016, 2004. [DOI] [PubMed] [Google Scholar]
- Marigold and Patla 2002.Marigold DS, Patla AE. Strategies for dynamic stability during locomotion on a slippery surface: effects of prior experience and knowledge. J Neurophysiol 88: 339–353, 2002. [DOI] [PubMed] [Google Scholar]
- McIlroy and Maki 1993.McIlroy WE, Maki BE. Do anticipatory postural adjustments precede compensatory stepping reactions evoked by perturbation? Neurosci Lett 164: 199–202, 1993. [DOI] [PubMed] [Google Scholar]
- McMahon 1984.McMahon TA Muscles, Reflexes, and Locomotion. Princeton, NJ: Princeton University Press, 1984.
- Morton et al. 2001.Morton SM, Lang CE, Bastian AJ. Inter- and intra-limb generalization of adaptation during catching. Exp Brain Res 141: 438–445, 2001. [DOI] [PubMed] [Google Scholar]
- Nashner 1982.Nashner L Adaptation of human movement to altered environments. Trends Neurosci 5: 358–361, 1982. [Google Scholar]
- Pai 2003.Pai YC Movement termination and stability in standing. Exercise Sport Sci Rev 31: 19–25, 2003. [DOI] [PubMed] [Google Scholar]
- Pai and Iqbal 1999.Pai YC, Iqbal K. Simulated movement termination for balance recovery: Can movement strategies be sought to maintain stability even in the presence of slipping or forced sliding? J Biomechan 32: 779–786, 1999. [DOI] [PubMed] [Google Scholar]
- Pai et al. 2003.Pai YC, Wening JD, Runtz EF, Iqbal K, Pavol MJ. Role of feedforward control of movement stability in reducing slip-related balance loss and falls among older adults. J Neurophysiol 90: 755–762, 2003. [DOI] [PubMed] [Google Scholar]
- Patla et al. 1991.Patla AE, Prentice SD, Robinson C, Neufeld J. Visual control of locomotion: strategies for changing direction and for going over obstacles. J Exp Psychol Hum Percept Perform 17: 603–634, 1991. [DOI] [PubMed] [Google Scholar]
- Pavol et al. 2002a.Pavol MJ, Owings TM, Grabiner MD. Body segment inertial parameter estimation for the general population of older adults. J Biomechan 35: 707–712, 2002a. [DOI] [PubMed] [Google Scholar]
- Pavol and Pai 2002b.Pavol MJ, Pai YC. Feedforward adaptations are used to compensate for a potential loss of balance. Exp Brain Res 145: 528–538, 2002b. [DOI] [PubMed] [Google Scholar]
- Pavol and Pai 2007.Pavol MJ, Pai YC. Deficient limb support is a major contributor to age-differences in falling. J Biomechan 40: 1318–1325, 2007. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Pavol et al. 2002b.Pavol MJ, Runtz EF, Edwards BJ, Pai YC. Age influences the outcome of a slipping perturbation during initial but not repeated exposures. J Gerontol A Biol Sci Med Sci 57: M496–503, 2002b. [DOI] [PubMed] [Google Scholar]
- Reynolds and Bronstein 2003a.Reynolds RF, Bronstein AM. The moving platform aftereffect: limited generalization of a locomotor adaptation. J Neurophysiol 91: 92–100, 2003a. [DOI] [PubMed] [Google Scholar]
- Reynolds and Bronstein 2003b.Reynolds RF, Bronstein AM. The broken escalator phenomenon. Aftereffect of walking onto a moving platform. Exp Brain Res 151: 301–308, 2003b. [DOI] [PubMed] [Google Scholar]
- Schmidt and Lee 1999.Schmidt RA, Lee TD. Motor Control and Learning: A Behavioral Emphasis. Champaign, IL: Human Kinetics Publishers, 1999.
- Shadmehr and Moussavi 2000.Shadmehr R, Moussavi ZM. Spatial generalization from learning dynamics of reaching movements. J Neurosci 20: 7807–7815, 2000. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Timmann and Horak 1997.Timmann D, Horak FB. Prediction and set-dependent scaling of early postural responses in cerebellar patients. Brain 120: 327–337, 1997. [DOI] [PubMed] [Google Scholar]
- Troy and Grabiner 2006.Troy KL, Grabiner MD. Recovery responses to surrogate slipping tasks differ from responses to actual slips. Gait Posture 24: 441–447, 2006. [DOI] [PubMed] [Google Scholar]
- van Hedel et al. 2002.van Hedel HJ, Biedermann M, Erni T, Dietz V. Obstacle avoidance during human walking: transfer of motor skill from one leg to the other. J Physiol 543: 709–717, 2002. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Vetter and Wolpert 2000.Vetter P, Wolpert DM. Context estimation for sensorimotor control. J Neurophysiol 84: 1026–1034, 2000. [DOI] [PubMed] [Google Scholar]
- Wang and Sainburg 2003.Wang J, Sainburg RL. Mechanisms underlying interlimb transfer of visuomotor rotations. Exp Brain Res 149: 520–526, 2003. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Welch et al. 1993.Welch RB, Bridgeman B, Anand S, Browman KE. Alternating prism exposure causes dual adaptation and generalization to a novel displacement. Percept Psychophys 54: 195–204, 1993. [DOI] [PubMed] [Google Scholar]
- Winter 2005.Winter D Biomechanics and Motor Control of Human Movement. Hoboken, NJ: Whiley, 2005.
- Witney et al. 2001.Witney AG, Vetter P, Wolpert DM. The influence of previous experience on predictive motor control. Neuroreport 12: 649–653, 2001. [DOI] [PubMed] [Google Scholar]
- Wolpert and Ghahramani 2000.Wolpert DM, Ghahramani Z. Computational principles of movement neuroscience. Nat Neurosci 3: 1212–1217, 2000. [DOI] [PubMed] [Google Scholar]
- Wood and Ging 1991.Wood CA, Ging CA. The role of interference and task similarity on the acquisition, retention, and transfer of simple motor skills. Res Q Exerc Sport 62: 18–26, 1991. [DOI] [PubMed] [Google Scholar]
- Yang et al. 2007.Yang F, Anderson FC, Pai YC. Predicted threshold against backward balance loss in gait. J Biomechan 40: 804–811, 2007. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Yang et al. 2008.Yang F, Anderson FC, Pai YC. Predicted threshold against backward balance loss following a slip in gait. J Biomechan 41: 1823–1831, 2008. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Yang and Pai 2007.Yang F, Pai YC. Correction of the inertial effect resulting from a plate moving under low friction conditions. J Biomechan 40: 2723–2730, 2007. [DOI] [PMC free article] [PubMed] [Google Scholar]