

Abstract
Younger drivers (18–21 years) are over-involved in crashes. Research suggests that one of the reasons for this over-involvement is their failure to scan areas of the roadway for information about potential risks in situations that are hazardous, but not obviously so. The primary objective of the present study is to develop and evaluate a training program that addresses this failure. It was hypothesised that PC-based hazard anticipation training would increase the likelihood that younger drivers would scan for potential hazards on the open road. In order to test this hypothesis, 12 trained and 12 untrained drivers' eye movements were measured as they drove a vehicle on local residential, feeder and arterial roads. Overall, the trained drivers were significantly more likely to gaze at areas of the roadway that contained information relevant to the reduction of risks (64.4%) than were the untrained drivers (37.4%). Significant training effects were observed even in situations on the road that were quite different from those shown in training. These findings have clear implications for the type of training of teen drivers that is necessary in order to increase their anticipation of hazards.
Keywords: younger drivers, hazard anticipation, driver training, eye movements, driving simulators
Introduction
Younger drivers between the ages of 18 and 21 years have a fatality rate per 100 million vehicle miles that is almost five times higher than the safest group of drivers, those between the ages of 50 and 54 years (Insurance Institute for Highway Safety 2004a). This group consists mostly of drivers who have had their unrestricted licence for at least 1 year and are well beyond learning the basic vehicle navigation skills. There are many reasons for the increased fatality rate, including factors such as speed and alcohol (Mayhew et al. 1986). Educational efforts to decrease crashes due to these factors do not appear to be especially effective (Insurance Institute of Highway Safety 2004b). However, over half of the crashes do not involve either high speed or alcohol (McKnight and McKnight 2003), suggesting that other types of education can play a considerable role in reducing crashes for these drivers.
Interestingly, the group of experienced licensed younger drivers has seldom, if ever, been targeted for additional driver training (experienced licensed younger drivers are here defined as drivers 21 years of age or less who have had their unrestricted licence for at least 1 year). However, it is a particularly critical group to consider for such training, as they have learned the basic vehicle navigation skills and thus can focus on whatever additional behaviours might be needed to reduce the likelihood of their crashing with fewer compromises to their handling of the car than licensed but less experienced younger drivers (inexperienced licensed younger drivers are defined as drivers 21 years of age or less who have had their unrestricted license for less than 1 year). Experienced licensed younger drivers are also at the point where learning good habits could translate into a lifetime of reduced risk.
The question, then, is what behaviours should be the focus of training among the group of experienced licensed younger drivers? A recent analysis of 2000 police reports of crashes that involved licensed younger drivers between the ages of 16 and 19 years indicates that the major contributor to crashes is the driver's failure to scan the roadway for information that can reduce the driver's risks (McKnight and McKnight 2003). Failures to do such were implicated in some 43% of the crashes. This is consistent with field research using an eye tracker, undertaken both recently (Crundall and Underwood 1998) and over 30 years ago (Mourant, and Rockwell 1972), which indicates that younger drivers fail to scan as broadly side to side as do older, more experienced, drivers. Moreover, research undertaken in the laboratory indicates that during the actual unfolding of a hazardous situation, novice drivers have longer fixations on the road ahead than do more experienced drivers (Chapman and Underwood 1998a), suggesting that they may be slower to respond to an event in the periphery, and Crundall et al. (2002) have directly shown that they are.
A more detailed analysis of the actual spatial and temporal pattern of one-, two- and three-fixation sequences of novice (mean age 19.9 years, mean experience 0.2 years) and experienced (mean age 27.7 years, mean experience 9.0 years) drivers' eye movements has recently been undertaken (Underwood et al. 2003). These sequences were gathered on the open road using rural, suburban and highway sections. The view of the roadway ahead was divided into nine separate sections. The rear view mirror counted as an additional section and all other glances were grouped together into a final, 11th, section. The distribution of fixations across the 11 sections was similar for the novice and experienced drivers. However, differences appeared in the two- and three-fixation sequences. Looking at the two-fixation sequences, the likelihood that a novice driver fixated the road-far-ahead, given that the driver had fixated some other section, was generally higher than was this likelihood for experienced drivers. This is consistent with the findings above that novice drivers are looking less thoroughly for information in the periphery than experienced drivers since the novice drivers are less likely to glance to something new in the periphery if they are already fixating some object in the periphery. Finally, an analysis of the three-fixation sequences similarly indicated that novice drivers were less likely than experienced drivers to scan from the road mid-ahead to some other region and then back to the road mid-ahead. Again, this is consistent with the finding that novice drivers are not paying enough attention to the information in the immediate periphery.
Although something is known about differences in the duration, variability and spatio-temporal sequence of the eye movements of novice and experienced drivers in both hazardous and non-hazardous scenarios from the above studies, less is known about the specific areas of a driving scenario that are and are not being differentially fixated, especially during hazardous situations in everyday driving. In one recent study, novice, experienced and expert (police) drivers were shown video clips of normal, pursuit and emergency response drives shot from inside the vehicle (Crundall et al. 2005). Participants' eye movements were recorded on 11 different areas (e.g. car ahead, side road, bicyclists). The present study is interested only in the comparison of the novice and experienced (but non-expert) drivers. As a percentage of the time that an object of a given category was present, novice drivers gazed less frequently at parked vehicles (9.5% vs. 11.7% for experienced drivers), pedestrians (17.3% vs. 18.9%), side roads (4.3% vs. 6.1%), but not at motorcyclists or cyclists (15.5% vs. 15.1%). None of these differences was reported as significant; however, they do suggest that the experienced driver is generally more cautious.
More direct evidence that younger drivers are often unaware of the areas of the roadway that they should be scanning comes from recent research undertaken on a driving simulator, in which eye movements were analysed (Pradhan et al. 2005b). Scenarios were created in a virtual drive such that specific areas of the roadway in a scenario were identified beforehand as places where it was necessary to scan in order to reduce risk. The scenarios fell into three categories: (a) scenarios in which a sign or pavement marking gives advance warning of a threat that is obscured by a vehicle or object in the environment and is not visible until the last moment; (b) scenarios in which a threat is visible and capable of moving into the driver's path, but is not moving as the driver approaches it; or (c) scenarios in which information about a potential threat (such as a pedestrian approaching the street) can be seen far enough in advance to react appropriately, but which is obscured until the last moment by a vehicle or other object in the environment. In all cases, there was no obvious physical cue (such as an object advancing into the driver's path of travel) that indicated that the situation was potentially hazardous. Moreover, the threat never materialised.
Across a total of 16 different scenarios, drivers between the ages of 16 and 17 years who had their learner's permit (provisional licence) scanned the critical areas in these scenarios only 35.1% of the time; licensed drivers between the ages of 19 and 29 years scanned the critical areas 50.3% of the time; and licensed drivers between the ages of 60 and 75 years scanned the critical areas 66.2% of the time. It was also clear from measures of vehicle behaviours in the same scenarios that the younger drivers were not responding as safely as more experienced drivers to the risks (Fisher et al. 2002), presumably because they did not recognise the risks in the first place (Pollatsek et al. 2006a). Since these scenarios were not obviously dangerous, the fact that novice drivers were less likely to scan the critical areas in the periphery cannot be due to drivers' longer gaze durations on the road ahead, which was observed in the more transparently difficult driving scenarios used by Chapman and Underwood (1998a).
Given this conclusion, a training program that increases the likelihood that licensed younger drivers will fixate areas of the roadway that contain information about immediate risks could potentially decrease crashes and the resulting injuries and fatalities. Several such training programs have been developed, including ones in England (McKenna and Crick 1994, Chapman et al. 2002, McKenna et al. 2006), Australia (the Monash University Accident Research Center; Regan et al. 1999) and the United States (the AAA Foundation for Traffic Safety, Willis 1998, Systems Technologies, Inc., Allen et al. 2003; and the University of Massachusetts at Amherst, Fisher et al. 2004, Pollatsek et al. 2006b).
At the broadest level, Chapman et al. (2002) and Underwood (2007) have introduced a training program that attempts to train both critical hazard anticipation strategies and tactics. The term ‘strategies’ is meant here as patterns of eye movements independent of the particulars of a scene, which have been shown to be present among more experienced drivers. These patterns include a wide and rapid pattern of visual scanning, a pattern recommended by driving instructors (Miller and Stacey 1995) and that was found in a recent naturalistic study to be associated with a reduction in the number of crashes (Klauer et al. 2006). The term ‘tactics’ is meant as patterns of eye movements in a particular scenario and at a particular time that provide the driver with information that could potentially reduce the likelihood of a risk materialising. In order to train both strategies and tactics, Chapman et al. asked their participants to watch a video of potentially dangerous driving situations while engaging in tasks that required them to practise their scanning skills, to anticipate hazards while doing so and to show that they understood why the scenarios were potentially hazardous. Chapman et al. evaluated the effect of their training program on drivers' eye movements using both videos of dangerous situations and actual on-road driving. With the video evaluation, Chapman et al. found reductions in the fixation durations of the trained drivers and increases in the horizontal spread of fixations. This could be due to more general changes in strategy (the trained drivers looking more widely and more rapidly) or to more specific changes in tactics (the trained drivers better anticipating where hazards might occur and therefore needing to spend less time identifying the hazards). With the on-road evaluation, there was no effect of training on fixation durations, but the trained drivers had a wider horizontal spread.
More recently, McKenna et al. (2006) gathered information on the effects of training on the time that it took drivers to anticipate specific hazards. The trained novice drivers were asked to watch a 21 min video in which a driving instructor commented on safe driving techniques and to take notes at the same time. Untrained drivers watched the same video, but without the commentary or the request to take notes. Both groups were then asked to watch a video and press a button as soon as they saw something that might turn into a dangerous situation. For example, in one scene a cyclist is riding toward the car doing the filming and crosses at the last minute in front of the camera car. The trained drivers responded significantly faster to potential hazards than did the untrained drivers.
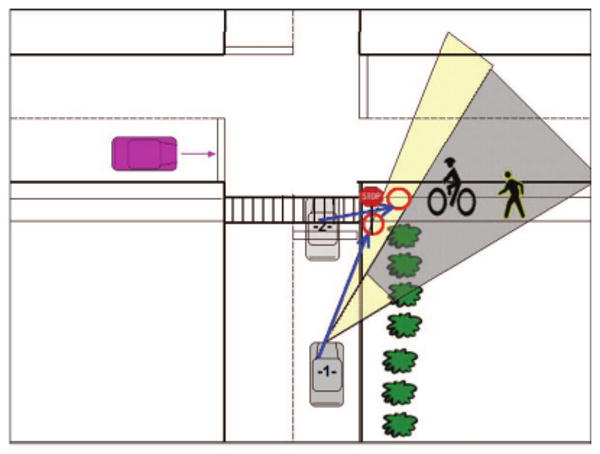
Ideally, one would like to know whether novice drivers could be trained to look for potential hazards even when the hazards did not materialise – as is typically the case. Towards this end, an attempt was made recently to determine whether a training program that was focused solely on tactics could lead to improved hazard anticipation skills in scenarios that were difficult to identify as hazardous – that set of scenarios in which the largest differences between novice and experienced drivers have been observed (Pollatsek et al. 2006a). Specifically, in the version of the Risk Awareness and Perception Training (RAPT) program included in that study, plan (top down) views were used in almost all situations to present scenarios that were not obviously hazardous and whose risks could be reduced if certain key areas of the roadway were scanned. For example, consider the plan view shown in Figure 1 (what will be referred to as the truck crosswalk scenario). In it, the person being trained (the trainee) is supposed to take the perspective of the driver in vehicle 1. From that perspective, a truck is parked in front of a marked midblock crosswalk, potentially obscuring the driver's view of a pedestrian crossing in front of the truck. The trainee is told to drag the yellow ovals to areas of the roadway that contain a risk that cannot be seen by the driver and to drag the red circles to areas of the roadway that they should monitor more or less continuously (see Figure 1 for correct answers for this scenario). This scenario meets the definition of one that is not obviously hazardous since a potential threat would be hidden by the vehicle stopped in front of the crosswalk. Moreover, it meets the criterion of containing a well-defined area such that scanning it provides the driver with information that can help him or her reduce the likelihood of a crash (the area immediately to the left and front of the truck; Pradhan et al. 2005a).
Figure 1.
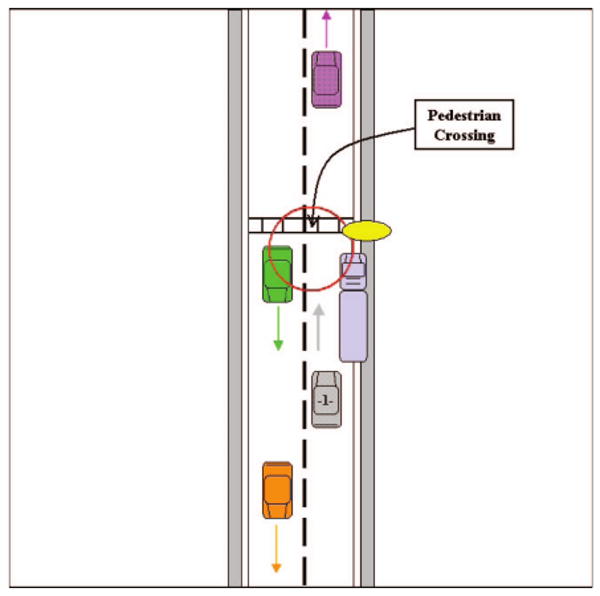
Plan view of truck crosswalk scenario.
The effects of this PC-based training were evaluated on 16 virtual scenarios on a driving simulator using younger drivers with a learner's permit. There were large and significant effects – both when the learner's permit younger drivers were tested immediately after training (Pollatsek et al. 2006b) and 3–5 days after training (Pradhan et al. 2005a, 2006a). The drivers tested on the driving simulator immediately after training (Pollatsek et al.) were 22.3 percentage points more likely to look at areas that contained information that could reduce their likelihood of a crash than were the untrained drivers (57.7% vs. 35.4%). The simulator scenarios fell into two groups: near transfer scenarios, which were similar to scenarios that had been trained on the PC; and far transfer scenarios, which were not similar to those that had been trained on the PC. The trained unlicensed drivers were 24.6 percentage points more likely to look at critical areas in the near transfer scenarios than the untrained drivers (51.9% vs. 27.3%), and 20.0 percentage points more likely in the far transfer scenarios (63.5% vs. 43.5%). Thus, the training generalised to scenarios that did not have obvious physical resemblance to the ones in training. Strikingly, virtually the same effects were observed when the simulator evaluation occurred 3–5 days after the PC-based training (Pradhan et al. 2006a): the overall training effect was 24.0 percentage points; the trained unlicensed younger drivers fixated on areas that contained information that would reduce the likelihood of a crash 52.1% of the time, compared with 28.1% for the untrained drivers. As in the earlier study, the training proved about equally effective with the near and far transfer scenarios. The effect of training was 23.0 percentage points for the near transfer scenarios (51.8% vs. 28.8%) and 26.0 percentage points for the far transfer scenarios (53.1% vs. 27.1%).
In summary, the evidence reviewed above indicates that, in situations in which a hazard is not obvious, younger drivers with their learner's permit look less often at areas of a simulated roadway which could reduce their risks than do more experienced licensed drivers (Pradhan et al. 2005a) and that training can increase the likelihood that such younger drivers will scan appropriately in such situations (Pollatsek et al. 2006b). Similarly, scanning in a virtual environment is also a problem for licensed younger drivers between the ages of 18 and 29 years when their performance was compared with experienced older drivers (Pradhan et al. 2005a). Thus, it is not unreasonable to expect that PC-based training programs that teach experienced licensed younger drivers to look for critical information in not so obvious hazardous scenarios have real promise in a simulated environment. However, it is not at all clear that such programs will produce equivalent results on the open road with experienced licensed younger drivers. In the experiment reported below, the effects of a training program such as has been described on the scanning behaviour of experienced licensed younger drivers are evaluated in the field, using an eye tracker to determine whether the drivers are looking at those specific areas of the roadway that contain information that can be used to reduce their risks of a crash. A driving instructor always sat in the front seat next to the trainee.
Method
Participants
The 24 participants were all recruited from the student body of the University of Massachusetts, Amherst campus. They were between 18 and 21 years old and all had held a valid US driver's licence for at least 1 year. The 12 male and 12 female participants were separately randomly assigned to the trained group or the untrained group, so that there were six male and six female participants in each group. Due to the difficulty in calibrating the eye tracker when people wear eye glasses, all participants either had normal vision or vision corrected to normal with contact lenses.
Training program
The participants in the trained group were trained on PCs using the RAPT program developed at the University of Massachusetts, Amherst. The first version (RAPT-1) was reported in Fisher et al. (2004) and Pollatsek et al. (2006b), the second version (RAPT-2) was reported in Pradhan et al. (2005b; 2006a) and the current version (RAPT-3) was developed for the current study. RAPT-3 was designed to illustrate different categories of scenarios that are hazardous (but with no obvious signal of danger) and to train drivers to focus their attention on critical regions that, if scanned, would reduce the likelihood of a crash.
RAPT-3 contains nine driving scenarios in which there is an inherent risk of a collision with another vehicle or pedestrian. One set of risks is due to vehicles or pedestrians being hidden from view until the last moment, either due to the geometry of the roadway or the presence of an obscuring vehicle. The second set of risks is due to visible elements, either cars that plausibly might change lanes abruptly or a pedestrian who might cause a lead car to brake suddenly. The scenarios were selected from a set used in prior studies, but since perspective views had to be photographed, safety issues made it necessary to select only those that did not directly involve a moving vehicle as the inherent risk in a scenario. In addition, in order to portray several of the scenarios accurately, some staging with other vehicles was necessary so that all the elements in the scenario would appear in the snapshots. (The complete training program can be accessed at www.ecs.umass/hpl)
The hidden sidewalk scenario should illustrate the general idea of the training (see Figure 2). In this scenario, the driver is approaching an intersection with a stop sign. There is a pedestrian crosswalk at the intersection, which is located after the stop line. The stop line and crosswalk are themselves relatively distant from the intersection with the road on which cross traffic travels. On the right just beyond the stop line there is a high hedge that hides a sidewalk that emerges on to the crosswalk. The risk is that a bicyclist or a pedestrian, hidden behind the hedge, could potentially suddenly enter the crosswalk. The scenario is one that is difficult to predict as hazardous. When setting up the test course, the authors studied this particular test intersection in downtown Amherst. Of the 20 drivers they observed, all drivers both failed to stop at the stop line and look to the right as they passed by the bushes, instead proceeding over the crosswalk and directly up to the boundary with the cross road.
Figure 2.

Hidden sidewalk perspective view.
There is not room to present all of the nine training scenarios in detail. (See the website cited above for a more complete description of all the training scenarios.) However, the nature of the training program scenarios can be illustrated by a brief description of those scenarios, like the hidden sidewalk scenario, that were quite similar to the scenarios that occurred in the field test (referred to below collectively as the near transfer scenarios). In the left fork scenario, the sequence of still photographs showed a driver approaching a road on the left that was obscured by bushes and other vegetation. A sign well ahead of the road indicated that traffic was entering from the left. It was critical that the driver glance to the left for any potential traffic. In the right turn (reveal) scenario, the sequence of still photographs depicted a driver approaching a stop sign at a ‘T’ intersection and then taking a right hand turn. The road to the left was visible for only a very short distance because it crested a hill and then dropped down out of sight. Thus, drivers had only a couple of seconds to see cars approaching from the left before turning right. It was critical that drivers look far to the left to the crest of the hill before taking a right hand turn. In the left turn (reveal) scenario, the sequence of still photographs showed a driver approaching a road on the left, on to which a left turn was made. The main road ahead crested a hill and the driver had only a couple of seconds to see cars in the opposing lane coming over the hill as the left turn was being made onto the side street. It was critical that the driver look to the right while turning left to determine whether any cars had crested the hill. Finally, in the abrupt lane change scenario, the sequence of still photographs depicted a driver passing a row of cars stopped in the left-hand travel lane waiting to take a left turn. There was a chance that one of the cars might abruptly change into the driver's lane. It was critical that the driver scan the row of cars occasionally to determine whether there was any movement suggestive of an abrupt lane change.
The RAPT-3 training program started with instructions and an initial practice section to familiarise the participant with the displays and the tasks they were to perform. This was followed by the three main sections of the training: pre-test; training; and post test. In the pre-test, each scenario was presented as a sequence of snapshots displaying the driver's view from a vehicle traversing through a particular driving situation (see Figure 3a–h). A scenario contained five to 12 snapshots, depending on the length and complexity of the situation. Each snapshot was displayed for 3 s. The participants used the mouse to click on areas of each snapshot to which they would have to pay particular attention if they were actually driving through the scenario. The coordinates of the click and response time for it were internally recorded by the program. In the pre-test section, the participants received no feedback on their performance.
Figure 3.
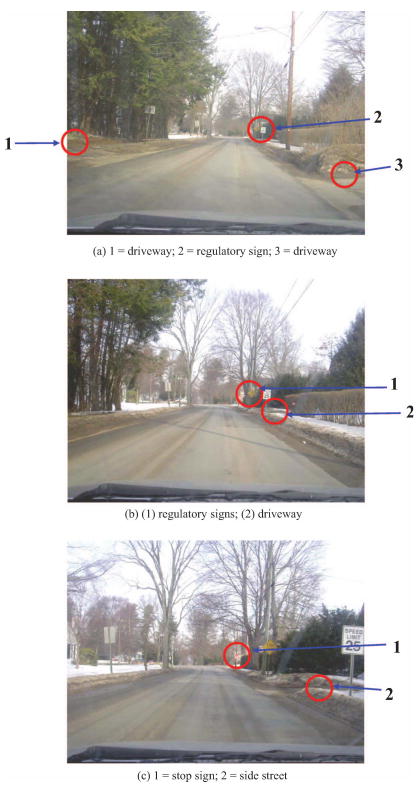
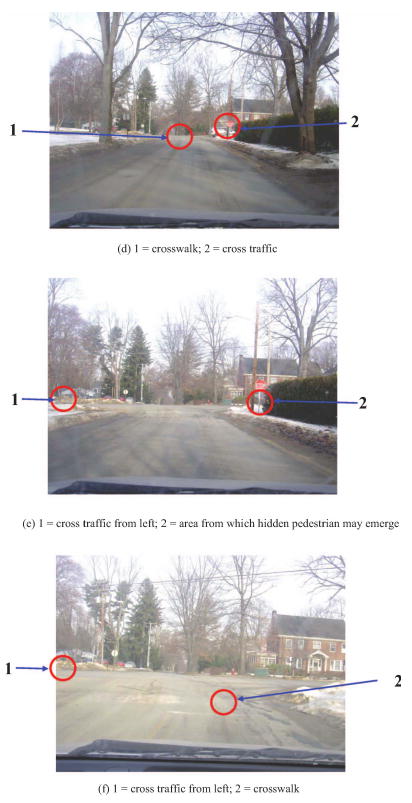
Hidden sidewalk sequence of stills: Risk Awareness and Perception Training, version 3 (RAPT-3).
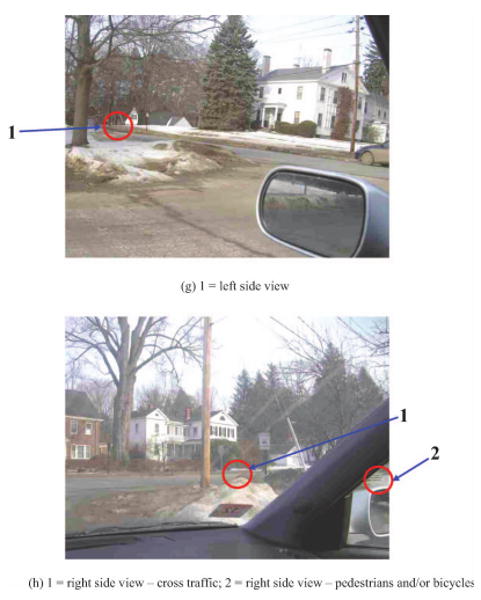
The snapshots were generally of views straight ahead of the car, but in situations where it was necessary for a driver to look to the left or the right (e.g. at an intersection), the participant could click on buttons provided on the left or right margins of the snapshot, which would show the corresponding left or right views (e.g. Figure 3h). These side views materialised only for situations where the driver would need to have a view of the left or right; although the side view buttons were always displayed, clicking on them in other situations did not change the view. The red circles in the snapshots in Figure 3 represent the areas of risk upon which the participants were likely to click, but the main area of interest was the circle labelled ‘2’ in Figure 3e.
The training came next. The user was first shown a top-down schematic view of a scenario accompanied with explanations about the risky aspects of the particular scenario (see Figure 4). After these explanations, the user was again presented with the sequence of perspective view snapshots for that scenario. As noted above, the relevant responses (clicks of the mouse) in a snapshot were internally recorded as correct if they were positioned in the critical area; otherwise they were recorded as incorrect. The size and location of the critical areas varied according to the scenarios, with scenarios having smaller or larger areas according to the various factors regarding the possible risk. These areas were always rectangular and included a slight tolerance to account for mouse positioning inaccuracy. If the user could successfully identify the critical areas, the program moved onto the next scenario. If not, the user was taken back to the training part of the scenario with the schematic view and corresponding explanations. The user was given up to four opportunities to correctly identify the areas of risk on the sequence of snapshots using the mouse.
Figure 4. Plan view of hidden sidewalk sequence.
This is an example of a situation where a potential risk is obscured by bushes. In this scenario, there is a crosswalk as indicated by the pavement striping. On the left, you can easily see approaching pedestrians or bicyclists. On the right, however, any approaching pedestrian or bicyclist is hidden by the bushes.
1 It is clear from the diagram that when you are at position 1 you cannot see to the right. As you approach the stop sign you, the driver, should glance frequently at the area where the crosswalk/sidewalk disappears behind the bushes so that you can slow immediately if someone were to appear in the crosswalk or sidewalk.
2 When you are passing the actual crosswalk you should look far to the right, turning your head if necessary. A bicyclist riding fast might not see you, and could be at risk if you were to accelerate through the crosswalk without looking to the right.
Finally, in the post-test section, the user was once again presented with the nine sequences of photographs and asked to use mouse clicks to identify areas of potential risk. As in the pre-test, the click coordinates and response times were recorded for this section and no feedback was provided to the user. (The response times were not used in the scoring, however.)
The training program was presented on a laptop computer running Microsoft Windows XP using a mouse as the pointing device. It was developed using Macromedia Director and was designed to operate on any Microsoft Windows-operating PC. Although the program was a single executable file and can be deployed on CD-ROMs or over the Internet, it was administered on the same computer in the driving laboratory to all trained participants.
Field driving route
The route driven by the participants was a 16-mile course plotted in and around Amherst, Massachusetts. It included major arterials and a variety of intersections and covered rural, residential, city and highway driving situations. It was designed to include 10 situations of interest (scenarios) that would be analysed. They were all embedded naturally within the driving course so that the participant had no indication that they were the primary areas of interest to the researchers. Five of the scenarios, the near-transfer scenarios, were the same concept as scenarios in the training program; four involved locations that had been photographed in the training scenarios and the other involved basically the same scenario as the one used in training but was in a different location.
The remaining five scenarios, the far-transfer scenarios, were different from the scenarios that were seen during training but embodied similar concepts. For example, one of the far-transfer test scenarios (truck crosswalk) involved a truck parked with its front end just before a crosswalk so that pedestrians would be hidden until just before they appeared in front of the test vehicle (see Figure 1). (This scenario was used in the earlier version of the RAPT-2 training program described in the introduction. However, it was not used in the current RAPT-3 training program, but was used as one of the test scenarios in the field drive.) This is clearly similar to the hidden sidewalk scenario described above (see Figure 2), in that there is an object that may be occluding a pedestrian, but the occluding object is a truck rather than the hedge in the training scenario. Another of the far-transfer scenarios also involved a truck (truck blocking travel), this time one parked on the side of a road in a suburban area of town. In this case, the truck driver may have emerged from in front of the truck suddenly and so have presented a similar danger to the participant. Again, this is similar to the near-transfer hidden sidewalk scenario. Two of the far-transfer scenarios (the blind driveway and curved stop ahead scenarios) involved a warning sign that indicated to drivers that they needed to pay particular attention to the roadway ahead. Both were similar, but certainly not identical, to the near-transfer left fork scenario. Finally, in the fifth far-transfer scenario (hidden drive), a driveway leading on to the road is situated such that even though the road itself is evident to the drivers, the drivers' view of possible emerging cars is obstructed due to vegetation and or/parked vehicles. The drivers have to be aware of this occlusion and pay particular attention to the drive for vehicles emerging suddenly. This particular scenario is also similar to the hidden sidewalk scenario except that the vegetation is occluding possible vehicles rather than pedestrians.
In total, 10 measures were extracted from these scenarios, one from each of the five near-transfer scenarios and one from each of the five far-transfer scenarios. In particular, the driver was scored as recognising the potential threat if he or she looked at the location from which a threat might emerge; otherwise the driver was scored as not recognising the threat.
Apparatus
A portable lightweight eye-tracker (Mobile Eye developed by Applied Science Laboratories, Pedford, MA, USA) was used to collect the eye-movement data for each driver during the on-road drives. It has a lightweight optical system consisting of an eye camera and a colour scene camera mounted on a pair of safety goggles. The images from these two cameras are interleaved and recorded on a remote system, thus ensuring no loss of resolution. The interleaved video can then be transferred to a PC, where the images are separated and processed. The eye movement data are converted to a crosshair, representing the driver's point of gaze, which is superimposed upon the scene video recorded during the drive. This provides a record of the driver's point of gaze on the driving scene while manoeuvring the on-road driving course. The remote recording system is battery powered and is capable of recording up to 90 min of eye and scene information in a single session. The eye position is sampled at 25 Hz. Head movement is virtually unlimited with a visual range of 50° horizontal and 40° vertical. The system has an accuracy of 0.5° visual angle and a resolution of 0.1° visual angle.
Each participant drove a four-door sedan with automatic transmission (a 2002 Chevy Prizm or a 2000 Chevrolet Cavalier). The vehicles were rented from a local area driving school and had a secondary braking system that could be operated by a certified driving instructor (who was sitting in the front passenger seat solely for safety reasons).
Procedure
All the participants first completed an informed consent form. The participants in the trained group were then given written instructions about the training program, after which they completed RAPT-3 on a PC. The program took about 30–45 min to finish. The participants in the control group did not take part in the training program.
Immediately after completing RAPT-3, the participants from the trained group were given written instructions about the on-road driving part of the study. The instructions touched on basic traffic safety (e.g. posted speed limits and traffic rules) and emphasised that the driver should keep conversation or other interaction with the driving instructor or the researcher in the car to a minimum. The participants from the control group were given these same instructions as soon as they came to the laboratory. The driver (control or trained) was then fitted with the eye tracker and the necessary calibration process was carried out, which took about 5 min. The participant then drove through the course with the driving instructor in the front passenger seat and a researcher in the back seat. The researcher provided the participant with information about where to turn at appropriate points in the course. The drive through the entire course took about 45–55 min to complete. To control for time-of-day effects and traffic conditions, the drives were all at 09.00 or 10.00 hours on weekdays. The eye-tracking system recorded the point of gaze data, which served as the primary dependent measure, along with a video record of the driver's view of the roadway during the entire drive.
Other than telling the driver where to make turns, the drive was not scripted in any way, except that the parked truck in the truck blocking travel far-transfer scenario was placed there by an experimenter. The only other way in which the experimenter perturbed the drive was when the calibration was lost because the safety glasses on which the optics were mounted shifted, either due to a sudden motion of the car or because the participant inadvertently touched the glasses. In that case, the participant was told to pull over to the side of the road as quickly as convenient and then they were recalibrated. This occurred only four times among all participants.
Results
Briefly, the novice drivers who were trained with RAPT were more likely in the field to glance at the critical areas in both the near- and far-transfer scenarios. The difference was larger in the near-transfer scenarios (38.1 percentage points) than in the far-transfer scenarios (17.9 percentage points); however, both differences were sizable and statistically significant.
One measure of the effectiveness of the RAPT training is a comparison of the post-test scores with the pre-test scores for the experimental group. This is an indicator of whether the participants were attending to the training and learned where the areas of potential risk were and could at least demonstrate this knowledge on perspective views in a PC-based environment without the competing demands of driving a vehicle. In fact, there was a large improvement from pre-test to post- test: 32.4% correct vs. 80.6% correct, t(11) = 9.60, p < 0.001.
The more important issue, of course, is whether the knowledge acquired during training is applied in on-road driving. The eye-movement data were analysed for all drivers at the predetermined locations in the on-road course designated as scenarios. Specifically, as noted above, the eye-movement fixations were identified and the coordinates of the point of gaze were converted to a crosshair that was superimposed on a video of the scene. This point of gaze information was then manually analysed for the presence of fixations on certain, pre-determined areas or objects of interest in the scenarios (the target zones) at pre-determined driver and vehicle positions (the launch zones). Stringent guidelines were laid out to define these areas of interest (i.e. the target and launch zones) and the appropriate patterns of fixations for each particular scenario. These areas of interest were those from where a driver could extract important information regarding any probable risks present in the scenario. For example, in the hidden sidewalk scenario it was recorded whether the participant looked at the left-hand edge of the bushes (Figure 3e, the area indicated by the arrow labelled 2). A binary scoring method was used for recording the glance behaviour of the drivers. If a driver exhibited the pre-defined appropriate eye-movement behaviour for a scenario (i.e. the target area of potential risk was fixated upon by the driver when the driver was in the launch zone), the driver was assumed to have recognised the areas of probable risk in the scenario and was given a score of ‘1’ for that scenario. If the eye-movement pattern did not cover the area of potential risk while the driver was in the launch zone, the driver was given a score of ‘0’ for that scenario.
Initially, the scoring was conducted independently by three different raters. To prevent observer bias, the raters were blind with regard to which group (trained vs. untrained) the driver was assigned. The raters agreed on the rating in a large majority of cases because the difference in behaviour between glancing appropriately and not glancing appropriately was not subtle. In almost all cases, a score of 0 meant that the driver continued to look straight ahead. Moreover, in virtually all of the scenarios, a score of 1 meant that the driver looked at least 5° to the left or right (whichever was appropriate for that scenario). In the relatively small minority of cases where the raters did not all agree on the score (see below), they went over the data from the scenario together to determine whether they could reach a consensus. When they could, that consensus score was used; when they could not reach consensus, the data from that scenario for that participant were not used (usually because something like glare made the eye-movement pattern difficult to score). There were some other scenarios that were not scored for a particular driver because the potential risky situation did not materialise for that driver (for example, the abrupt lane change scenario depended on cars being in the lane to the left of the driver and some of the time there were no such vehicles). However, the number of trials not scored was relatively small and about the same for the two groups (16 for the trained group and 18 for the untrained group out of a total possible of 144 measures in each group – 12 measures for each of the 12 participants).
The trained group was 28.8 percentage points more likely to glance at the pre-defined area of risk on the road in a scenario (60.6%) than the untrained group (31.8%), t(22) = 4.58, p < 0.001. As indicated above, the scenarios in the on-road course were divided into near-transfer and far-transfer scenarios. Analysed separately, the training effect was significant for both sets of scenarios. For the five near-transfer measures that were entered into the analysis, the difference between trained (72.7%) and untrained (34.6%) drivers was 38.1 percentage points, t(22) = 5.36, p < 0.001, and for the five far-transfer measures, the difference between the trained (46.0%) and untrained (28.1%) drivers was 17.9 percentage points, t(22) = 2.62, p < 0.01. In addition, the results were quite consistent across scenarios (see Table 1): the trained group scored higher than the untrained group for each of the above five near-transfer measures and for four of the five far-transfer measures. Gender differences were very small (|t statistics| <0.5). Averaged over trained and untrained drivers, the score for men was 3.8 percentage points higher (52.2% vs. 48.4%) and the difference between trained and untrained drivers was 5.0 percentage points larger for women (29.9% vs. 24.9% training effects).
Table 1.
Comparison of trained and untrained groups on individual scenarios: Field study*.
| Scenario† | Name | Performance in Trained Group | Performance in Untrained Group | Difference Between Trained and Untrained | |
|---|---|---|---|---|---|
| Near Transfer | 1 | Left Fork | 50.0% | 18.2% | 31.8% |
| 3 | Right Turn (Reveal) | 75.0% | 58.3% | 16.7% | |
| 4 | Left Turn (Reveal) | 100.0% | 41.7% | 58.3% | |
| 8 | Abrupt Lane Change | 55.0% | 25.0% | 30.0% | |
| 9 | Hidden Sidewalk | 75.0% | 25.0% | 50.0% | |
| Far Transfer | 2 | Blind Driveway | 36.4% | 8.3% | 28.0% |
| 5 | Truck Blocking Crosswalk | 28.8% | 4.2% | 24.6% | |
| 6 | Hidden Drive | 20.0% | 36.4% | −16.4% | |
| 7 | Curve Stop Ahead | 62.5% | 57.1% | 5.4% | |
| 10 | Truck Blocking Travel | 90.0% | 62.5% | 27.5% |
The average of the scenarios is not exactly the same as the average over participants reported in the text because of missing data cells.
The numbering of the scenarios is the same as those on website www.ecs.umass.edu/hpl
Discussion
The results of the study clearly indicate that the RAPT-3 training procedure was effective in changing where the inexperienced licensed younger drivers looked during potentially hazardous situations on the road. This is noteworthy, as the training took less than 1 h and was in an environment quite different from actual driving (i.e. the training took place on a PC, making manual responses unrelated to those in driving). At this point, three additional comments on these findings and a discussion of a few more general concerns are in order.
Does driving skill play a role in poor hazard anticipation skills?
The present data indicate that the untrained younger drivers did not know that the situations in these scenarios were potentially hazardous, rather than they knew the situations were hazardous but were too involved in the driving task to recognise or respond to them as such. The argument to support this conclusion is straightforward. If limitations due to driving skill were the cause of the poor performance of the untrained drivers, the trained novice drivers should also have been too involved in the driving task to fixate appropriately in the scenarios. Moreover, the data from prior studies in which hazard anticipation was assessed on a driving simulator suggest that the difference in the driving skills of novice and experienced drivers had no impact on the performance of the trained novice drivers. Specifically, in tests on the simulator, trained younger drivers in one study (Pollatsek et al. 2006b) performed as well as (untrained) experienced drivers did in another study on the same set of scenarios (Pradhan et al. 2005a). Another finding that indicates that the poorer scanning performance of novice drivers is not merely due to their greater attention to the driving task is that novice drivers are less likely than experienced drivers to fixate areas of potential risk even when they are just viewing a tape of a drive and asked to report potential risks (Underwood 2007).
Is tactical training scenario specific?
Second, these data indicated that tactical training produced benefits on the road, not only in those scenarios that resemble the ones that have been trained on the PC but also in scenarios that are quite dissimilar from those that have been trained on the PC except for the defining characteristics of the three categories of scenarios. This raises the question of whether the trained drivers were scanning more in general than the untrained drivers or instead were scanning only in the areas where the risk was highest and where scanning would be most appropriate. The latter would suggest that the tactical training does not spill over into a more general strategy of looking to the side more often, whereas the former would suggest the possibility that the training largely taught drivers to generally scan more widely and more frequently. For example, Chapman et al. (2002) found that their training produces drivers who scanned more frequently in all situations and not just in more risky situations. (The latter is not necessarily a bad thing as long as the drivers are not too distracted from fixating on the road in front of them.)
In order to test whether training produced situation-specific changes in eye-movement behaviour, video data from the simulator study reported by Pradhan et al. (2006a) of trained and untrained drivers were examined to determine whether fixation patterns were different in the critical areas where there were potential risks (these critical areas were the ones defined for the scenarios that were reported above) than those in control areas of the roadway, where there were no obvious risks. In some of the critical scenarios, the appropriate response was to scan to the left, and the trained drivers scanned to the left in these scenarios 24.8 percentage points more often than they scanned to the left in control portions of the scenario (see Table 2). In the other scenarios, where the appropriate response was to scan to the right, the trained drivers scanned to the right 29.6 percentage points more often than in the control regions. The average of these two scores was computed for each participant (this average presumably measures how much more they are looking at the appropriate place in the hazardous scenario than in the control non-hazardous scenario). The value of this average for the trained participants was 27.2%, t(10) = 3.92, p < 0.005, whereas for the untrained participants, it was 10.6%, t(10) = 1.84, p > 0.05. Thus, it can be concluded that the training is causing the trained participants to look to the appropriate side in the scenario and not to their looking around more in general. The data for the untrained participants do suggest that they are not performing at chance and are looking at the appropriate location during scenarios a bit more than one would predict by their base rates of looking around.
Table 2.
Times that trained and untrained drivers looked to the left and right in hazardous and non-hazardous scenarios.
| Condition | |||
|---|---|---|---|
| Side | In scenario | Not in scenario | Difference |
| Experimental (trained) participants | |||
| Left | 52.7% | 27.9% | 24.8% |
| Right | 54.3% | 24.7% | 29.6% |
| Control (untrained) participants | |||
| Left | 27.3% | 18.2% | 9.1% |
| Right | 30.3% | 18.2% | 12.1% |
Could advanced driving programs help novice drivers?
Third, the focus in the present study has been on driving programs for novice drivers and, in particular, those that develop the hazard anticipation skills of such drivers. Perhaps programs that were targeted for more advanced drivers would work at least as well, if not better, than programs that were targeted solely at novice drivers. Surprisingly, some programs, such as those that train skid control skills, have actually led either to an increase in crashes (Glad 1998, as cited in Katila et al. 2004) or to no change in crashes (Katila et al. 2004). Other programs that were targeted more broadly at the knowledge, skills and attitudes of advanced drivers have had a more beneficial effect overall (Stanton et al. 2007). However, they have failed to yield the specific benefit during actual on-road driving that is the focus of the training program described above: the improvement in hazard anticipation skills. It is not immediately clear why such programs fail to improve these skills. However, a contributing reason would appear to be the generic element in the training of these skills, as specific hazardous scenarios were not detailed.
How well are trained novice drivers anticipating hazards relative to experienced drivers?
Fourth, although the training in this study produced a 28.7 percentage point improvement overall, the trained drivers were still appropriately responding to only 60.6% of the risks in the near- and far-transfer scenarios. This figure could be increased considerably, one would assume, if drivers are trained on a larger sample of potentially risky scenarios. Note that in the near-transfer scenarios, the trained drivers recognised 72.7% of the risks, which was considerably more than the rate in the far-transfer scenarios (46.0%), the ones that had not specifically been trained on the PC. Nonetheless, as indicated above, when training was evaluated on the driving simulator, the overall performance of the trained inexperienced drivers was approximately equal to that of experienced drivers. However, this comparison may be compromised both because one might expect drivers to behave differently on the simulator than they do on the road and because of other differences between the studies. These are potentially serious concerns that it is important to now address.
Limitations
First, one might be concerned that drivers may simply have been matching what they saw in the perspective views with what they saw in the real world and did not really learn anything about hazard anticipation in general. This concern arises because some sequences of perspective views used in the PC-based training in the present study (e.g. Figure 3) were very similar to what the driver might have seen out in the field (depending on the time of day, what traffic was present, and so on). However, there was strong evidence of learning in the far-transfer scenarios as well, where there were no surface features in common between the test scenario and any of the training scenarios. Additionally, a study has recently been conducted using the same, real-world perspective views in the training but then evaluating learning on a driving simulator, where the perspective views in the driving simulator are considerably different from those in the real world (Fisher et al. 2007). This study evaluated trained and untrained experienced licensed younger drivers on the driving simulator and obtained results strikingly similar to those in the present study. Among the five identical near-transfer scenarios in the simulator and field studies, the training effect was 41.3 percentage points (70.6% vs. 29.3%) for the simulator study, which was about what it was in the present field study, 38.1 percentage points (72.8% vs. 34.6%). These results were similar not only in the size of the training effect, but in terms of overall performance: 31.8% and 41.7% in the left fork, 16.7% and 16.7% in the right turn reveal, 58.3% and 40.2% in the left turn reveal, 30.0% and 57.8% in the abrupt lane change and 50.0% and 50.0% in the hidden crosswalk scenarios, in the field and simulator studies, respectively. (See Table 3 for the results from the individual scenarios in the simulator study.) The results of the field and simulator studies are presumably so similar because the drivers learned something general about the scenarios, not just matching a perspective view in the training phase with one in the evaluation phase.
Table 3.
Comparison of the trained and untrained groups on individual scenarios in the simulator study*.
| Scenario† | Name | Performance in Trained Group | Performance in Untrained Group | Difference Between Trained and Untrained | |
|---|---|---|---|---|---|
| Near Transfer | 3 | Left Fork | 58.3% | 16.7% | 41.7% |
| 5 | Right Turn (Reveal) | 75.0% | 58.3% | 16.7% | |
| 8 | Left Turn (Reveal) | 58.3% | 18.1% | 40.2% | |
| 17 | Abrupt Lane Change | 77.7% | 20.0% | 57.7% | |
| 13 | Hidden Sidewalk | 83.3% | 33.3% | 50.0% | |
| Far Transfer | 9 | Blind Drive | 91.7% | 58.3% | 33.3% |
| 6 | Truck Blocking Crosswalk | 75.0% | 33.3% | 41.7% | |
| 16 | Hidden Drive | 91.7% | 50.0% | 41.7% | |
| 14 | Curve Stop Ahead | 91.7% | 17.0% | 74.7% | |
| 11 | Truck Blocking Travel | 66.7% | 16.7% | 50.0% |
The averages of the scenarios are not exactly the same as the participant averages reported in the analyses in the text because of missing data cells.
The numbering of the scenarios is the same as those on website www.ecs.umass.edu/hpl
Second, it is possible that hazard anticipation skills learned on a PC would not transfer to the field if the experiments were repeated, despite what was reported above. This is because there is a more general scepticism about whether training driving skills in an environment such as a computer in a laboratory transfers to a very different situation such as driving on the road (e.g. Groeger and Banks 2007). The question is whether this more general scepticism applies to the training of hazard anticipation skills. The scepticism about whether learning from the laboratory will transfer to the field is based on the assumption that the skills whose transfer is the focus of attention are ones that are infrequently employed and when employed must be completed very quickly:
This ‘positive transfer’ from prior learning must enable the driver to evaluate circumstances not previously experienced as a driver, perhaps performing actions or combinations of actions rarely, if ever performed previously, and do so if not instantaneously, then in a matter of a few hundreds of milliseconds.
Groeger and Banks 2007, p. 1251
However, ‘laboratory training’ involves a very different set of skills, ones that are exercised frequently while driving and that do not have to be completed in milliseconds. Moreover, the bulk of the evidence suggests that it is just such frequent, relatively slow duration processes such as hazard anticipation that are the ones that get learned in the first 6 months of driving (McKnight and McKnight 2003).
Third, the present effects of training may be as strong as they are because the participants had the road test immediately after training. However, the experiments on the driving simulator described both immediately above (Fisher et al. 2007) and earlier (Pradhan et al. 2005b, 2006a) can mitigate this concern, at least somewhat. That is, as mentioned above, the effects of an earlier version of the training program (RAPT-2) were as large when the simulator test was several days after training (Pradhan et al. 2005b, 2006a) as when the simulator test was immediately after training (Pollatsek et al. 2006b). Then, given that it also appears that the effects of training are virtually the same when tested on the road as when tested on the simulator, there is no reason to expect that the effects of training would dissipate any faster in the road test than in the simulator test. Moreover, there is no reason to expect that the effects of the RAPT-2 training would endure for several days, but not the RAPT-3 training, because both used plan views to explain why it was that a scenario was potentially hazardous. However, the answer is ultimately an empirical one.
Fourth, there is the concern that the results from this study, where the participant is riding with a driving instructor, may not transfer to situations in which the participant was not riding with a driving instructor. A study undertaken some time ago indicates that the safe driving practices of newly licensed drivers with a person evaluating their performance sitting in the front seat is only loosely correlated with these practices when there is no individual sitting with them (McPherson and McKnight 1981). The safe driving practices include such things as speed selection, looking to the side and behind (as measured by head movements) and communicating (lane changes, turns). When the newly licensed driver was being observed, there was both a state examiner in the front seat and someone scoring safe practices in the back seat. When the newly licensed driver was not observed, a video was made from a following car of the newly licensed driver as he or she travelled some 5–10 min between two locations. The video was scored separately for safe driving practices. The newly licensed driver was not informed that he or she was being filmed or followed and so the behaviour is truly representative of what might be happening in the real world. No measures were made of actual eye movements, so it is difficult to know whether they would have remained the same across the situations in which drivers knew and did not know that they were being observed. Perhaps the closest individual measures that are related to eye movements are looks to the side and behind. These correlations were not significant individually. However, as the authors note, it was difficult to score performance using the videotapes. Perhaps the low correlations are not surprising. Unfortunately, such a study cannot be replicated in the field today. Due to safety concerns, it is not possible to study the eye behaviours of the newly licensed with head-mounted eye trackers unless someone is in the car with the driver. Moreover, it should be emphasised that in the current study, there was a driving instructor in the front seat and the experimenter in the back seat for both the trained and untrained drivers. Thus, any effects due to the driver being on their best behaviour should have occurred in both groups.
Fifth, there is an apparent conflict between this study and a recent study published by Sagberg and Bjørnskau (2006). That is, their study suggests that hazard perception is only a minor factor in the rapid decrease in crash risk observed among newly licensed drivers, a claim directly counter to what is being argued above. As such, it is important to understand the difference between their study and the present study. Briefly, the hazard detection perception/ response times of licensed younger drivers 1, 5 and 9 months post licensure to critical situations that appeared in videos were compared with those of much more experienced drivers (on average 27.1 years post licensure, a minimum of 10). Overall, there was no difference in the response times of the novice and experienced drivers averaged across 31 critical situations. Everything else being equal, if hazard anticipation skills are less developed for the novice drivers, one would predict much longer response times for the novice drivers. However, a more detailed analysis of their scenarios indicates the potentially critical source of the difference. In their scenarios, the hazards were always moving and usually obvious. In the scenarios in the current study, the hazards were never moving and almost never visible (only potential threats). Consistent with this interpretation, when their scenarios were examined individually, the novice drivers in the Sagberg and Bjørnskau (2006) study were slower to respond in six of the 31 critical situations and in most of these six scenarios, the hazard materialised at the last minute and therefore would have been difficult to anticipate.
Summary
It is recognised by the authors that not all crashes are caused by factors that will be mitigated by the training program that is being proposed. For example, 24% of the fatally injured drivers between the ages of 15 and 20 years had blood alcohol concentrations of 0.08g/dl or higher (National Highway Traffic Safety Administration). An additional 5% had blood alcohol concentrations between 0.01g/dl and 0.07g/dl. In addition, distractions inside the cabin of the vehicle are increasingly of concern (Klauer et al. 2006). Training teen drivers to recognise risks may have an indirect impact on crashes due to such causes, but it is certainly not known at this point whether making teen drivers more aware of risks will reduce their willingness to engage in unsafe interactions inside the vehicle or to drive under the influence of alcohol.
More generally, the current study does not make it possible to conclude that the training program is successful in reducing crashes. That is, training drivers to look in the right place when they come to a potentially hazardous situation does not guarantee that they will be able to avoid a crash. However, it can easily be argued that not looking in the right place almost certainly guarantees that they will not react to the risk appropriately. That is, the evidence from many cognitive psychology experiments on scene perception indicates that even though viewers can quickly get the gist of an entire scene from a brief glance (e.g. Boyce and Pollatsek 1992, Potter et al. 2002), objects have to be fixated in order for their identities to be registered and remembered even seconds later (e.g. Henderson and Hollingsworth 1999). Thus, the present authors feel confident in positing that although fixating appropriately during a scenario does not guarantee that the driver will take appropriate action if the risk in fact appears, not fixating appropriately during the scenario virtually guarantees either that the driver will not take appropriate action if the risk appears or take some hurried action that could actually make things worse (e.g. swerving into an incoming car).
The authors intend to follow up the present study by replicating it with 16–18 year old drivers who are within the first month of having obtained their restricted license and who are by far the most likely to be involved in a crash (Insurance Institute of Highway Safety 2004a). The range of abilities targeted by the RAPT program will be expanded, focusing both on helping novice drivers recognise risks that might be hidden and on teaching them how to respond if such risks should materialise. For example, work is currently proceeding on a training program on speed management that should help shape what drivers are doing as well as shape what they are perceiving. If the RAPT training works for inexperienced licensed younger drivers as well it did for experienced licensed younger drivers, there is a better chance that it could have a significant impact on driving safety because logistically it would be far easier to administer the RAPT training when the group of younger drivers being trained are still not fully licensed.
Acknowledgments
This research was funded by a grant from the National Highway Traffic Safety Administration (DTNH22–05-H-01421) and the National Science Foundation (Equipment Grant SBR 9413733 for the partial acquisition of the driving simulator). We especially want to thank the instructors and owner of the Pioneer Valley Driving School, Mary Ellen Paciorek, as well as the following graduate students, Michelle Langone, Jeffrey Muttart and Bhupinder Singh, for all of the work that they put into analysing the eye movement data. Preliminary analyses of the data were reported in Pradhan et al. (2006b).
Footnotes
Publisher's Disclaimer: Full terms and conditions of use: http://www.informaworld.com/terms-and-conditions-of-access.pdf
This article may be used for research, teaching and private study purposes. Any substantial or systematic reproduction, re-distribution, re-selling, loan or sub-licensing, systematic supply or distribution in any form to anyone is expressly forbidden.
The publisher does not give any warranty express or implied or make any representation that the contents will be complete or accurate or up to date. The accuracy of any instructions, formulae and drug doses should be independently verified with primary sources. The publisher shall not be liable for any loss, actions, claims, proceedings, demand or costs or damages whatsoever or howsoever caused arising directly or indirectly in connection with or arising out of the use of this material.
References
- Allen RW, et al. Experience with low cost, PC based system for younger driver training Paper No. 614. Hawthorne, California: Systems Technology, Inc.; 2003. [Google Scholar]
- Boyce SJ, Pollatsek A. Identification of objects in scenes: The role of scene background in object naming. Journal of Experimental Psychology: Learning, Memory and Cognition. 1992;18:531–543. doi: 10.1037//0278-7393.18.3.531. [DOI] [PubMed] [Google Scholar]
- Chapman PR, Underwood G. Visual search of driving situations: danger and experience. Perception. 1998;27:951–964. doi: 10.1068/p270951. [DOI] [PubMed] [Google Scholar]
- Chapman P, Underwood G, Roberts K. Visual search patterns in trained and untrained novice drivers. Transportation Research Part F. 2002;5:157–167. [Google Scholar]
- Crundall D, Underwood G. Effects of experience and processing demand on visual information acquisition in drivers. Ergonomics. 1998;41:448–458. [Google Scholar]
- Crundall D, Underwood G, Chapman P. Attending to the peripheral world while driving. Applied Cognitive Psychology. 2002;16:459–475. [Google Scholar]
- Crundall D, et al. What attracts attention during police pursuit driving. Applied Cognitive Psychology. 2005;19:409–420. [Google Scholar]
- Fisher DL, et al. The use of an advanced driving simulator to evaluate the effects of training and experience on drivers' behavior in risky traffic scenarios. Human Factors. 2002;44:287–302. doi: 10.1518/0018720024497853. [DOI] [PubMed] [Google Scholar]
- Fisher DL, et al. Using eye movements in driving simulators to evaluate effects of pc-based risk awareness training. Proceedings of the Human Factors and Ergonomics Society 48th annual meeting; Santa Monica, CA. 2004. pp. 2266–2270. [Google Scholar]
- Fisher DL, et al. Empirical evaluation of hazard anticipation behaviors in the field and on a driving simulator using an eye tracker. Talk to be presented at The 86th Transportation Research Board annual meetings; Washington, DC. 2007. [Google Scholar]
- Groeger JA, Banks AP. Anticipating the content and circumstances of skill transfer: Unrealistic expectations of driver training and graduate licensing? Ergonomics. 2007;50:1250–1263. doi: 10.1080/00140130701318723. [DOI] [PubMed] [Google Scholar]
- Henderson JM, Hollingsworth A. The role of fixation position in detecting scene changes across saccades. Psychological Science. 1999;5:438–443. [Google Scholar]
- Insurance Institute for Highway Safety. Fatality facts 2004: Older people. [1 March 2006];2004a online. Available from: http://www.iihs.org/research/fatality_facts/olderpeople.html.
- Insurance Institute for Highway Safety. Arlington, VA: The Institute; 2004b. [12 December 2006]. Q&A teenagers: underage drinking. online. Available from: www.hwysafety.org/research/qanda/underage.html. [Google Scholar]
- Katila A, et al. Does increased confidence among novice drivers imply a decrease in safety? The effects of skid training on slippery road accidents. Accident Analysis and Prevention. 2004;36:543–550. doi: 10.1016/S0001-4575(03)00060-5. [DOI] [PubMed] [Google Scholar]
- Klauer SG, et al. The impact of driver inattention on near-crash/crash risk: an analysis using the 100-car naturalistic driving study data Report No. DOT HS 810 594. Washington, DC: National Highway Traffic Safety Administration; 2006. [Google Scholar]
- McKenna FP, Crick JL. Hazard perception in drivers: A methodology for testing and training TRL Report 313. Crowthorne, UK: Transport Research Laboratory; 1994. [Google Scholar]
- McKenna FP, Horswill MS, Alexander JL. Does anticipation training affect drivers' risk taking? Journal of Experimental Psychology: Applied. 2006;12:1–10. doi: 10.1037/1076-898X.12.1.1. [DOI] [PubMed] [Google Scholar]
- McKnight JA, McKnight SA. Young novice drivers: Careless or clueless. Accident Analysis and Prevention. 2003;35:921–925. doi: 10.1016/s0001-4575(02)00100-8. [DOI] [PubMed] [Google Scholar]
- McPherson K, McKnight JA. Automobile driver on-road performance test Final report DOT-HS-806–207. Washington, DC: National Highway Traffic Safety Administration; 1981. [Google Scholar]
- Mayhew DR, et al. Youth, alcohol, and relative risk of crash involvement. Accident Analysis and Prevention. 1986;18:273–287. doi: 10.1016/0001-4575(86)90042-4. [DOI] [PubMed] [Google Scholar]
- Miller J, Stacey M. The driving instructor's handbook. London: Kogan Page; 1995. [Google Scholar]
- Mourant RR, Rockwell TH. Strategies of visual search by novice and experienced drivers. Human Factors. 1972;14:325–335. doi: 10.1177/001872087201400405. [DOI] [PubMed] [Google Scholar]
- Pollatsek A, Fisher DL, Pradhan AK. Identifying and remediating failures of selective attention in younger drivers. Current Directions in Psychological Science. 2006a;15:255–259. doi: 10.1177/0963721411429459. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Pollatsek A, et al. The use of eye movements to evaluate the effect of PC-based risk awareness training on an advanced driving simulator. Human Factors. 2006b;48:447–464. doi: 10.1518/001872006778606787. [DOI] [PubMed] [Google Scholar]
- Potter MC, et al. Recognition memory for briefly presented pictures: The time course of rapid forgetting. Journal of Experimental Psychology: Human Perception and Performance. 2002;28:1163–1175. doi: 10.1037//0096-1523.28.5.1163. [DOI] [PubMed] [Google Scholar]
- Pradhan AK, Fisher DL, Pollatsek A. The effects of PC-based training on novice drivers' risk awareness in a driving simulator Driving Assessment 2005 CD-ROM. Rockport, Maine: 2005a. [Google Scholar]
- Pradhan AK, et al. Using eye movements to evaluate effects of driver age on risk perception in a driving simulator. Human Factors. 2005b;47:840–852. doi: 10.1518/001872005775570961. [DOI] [PubMed] [Google Scholar]
- Pradhan AK, Fisher DL, Pollatsek A. Risk perception training for novice drivers: evaluating duration of effects on a driving simulator. Transportation Research Record. 2006a;1969:58–64. [Google Scholar]
- Pradhan AK, et al. Field evaluation of a risk awareness and perception training program for younger drivers. Proceedings of the Human Factors and Ergonomics Society 50th annual meeting; San Francisco. Santa Monica, CA. 2006b. pp. 2388–2391. [Google Scholar]
- Regan MA, Deery HA, Triggs TJ. Training for attentional control in novice car drivers. Proceedings of the Human Factors and Ergonomics Society 42nd annual meeting; Santa Monica. 1999. pp. 1452–1456. [Google Scholar]
- Sagberg F, Bjørnskau T. Hazard perception and driving experience among novice drivers. Accident Analysis and Prevention. 2006;38:407–414. doi: 10.1016/j.aap.2005.10.014. [DOI] [PubMed] [Google Scholar]
- Stanton NA, et al. Changing drivers' minds: The evaluation of an advanced driver coaching system. Ergonomics. 2007;50:1209–1234. doi: 10.1080/00140130701322592. [DOI] [PubMed] [Google Scholar]
- Underwood G. Visual attention and the transition from novice to advanced driver. Ergonomics. 2007;50:1235–1249. doi: 10.1080/00140130701318707. [DOI] [PubMed] [Google Scholar]
- Underwood G, et al. Visual attention while driving: sequences of eye fixations made by experienced and novice drivers. Ergonomics. 2003;46:629–646. doi: 10.1080/0014013031000090116. [DOI] [PubMed] [Google Scholar]
- Willis DK. The impetus for the development of a new risk management training program for teen drivers. Proceedings of the Human Factors and Ergonomics Society 42nd annual meeting; Santa Monica. 1998. pp. 1394–1395. [Google Scholar]