

Abstract
Purpose
This study was designed to examine the effect of homonymous hemianopia (HH) on detection of pedestrian figures in multiple realistic and hazardous situations within the controlled environment of a driving simulator.
Methods
Twelve people with complete HH and without visual neglect or cognitive decline and 12 matched (age, sex, and years of driving experience) normally sighted (NV) drivers participated. They drove predetermined city and rural highway routes (total, 120 minutes) during which pedestrian figures appeared at random intervals along the roadway (R-Peds; n = 144) and at intersections (I-Peds; n = 10). Detection rates and response times were derived from participant horn presses.
Results
Drivers with HH exhibited significantly (P < 0.001) lower R-Ped detection rates on the blind side than did NV drivers (range, 6%–100%). Detection of I-Peds on the blind side was also poor (8%–55%). Age and blind-side detection rates correlated negatively (Spearman r = −0.71, P = 0.009). Although blind-side response times of drivers with HH were significantly (P < 0.001) longer than those of NV drivers, most were within a commonly used 2.5-second guideline.
Conclusions
Most participants with HH had blind-side detection rates that seem incompatible with safe driving; however, the relationship of our simulator detection performance measures to on-road performance has yet to be established. In determining fitness to drive for people with HH, the results underscore the importance of individualized assessments including evaluations of blind-side hazard detection.
Homonymous hemianopia (HH) is the loss of half the field of vision on the same side in both eyes. It is caused by lesions in the postchiasmal visual pathways, primarily due to strokes and, to a lesser extent, trauma and tumors.1 In at least 22 states in the United States2 and many other countries, people with HH are prohibited from driving, as they do not meet the minimum visual field requirements for licensure; however, there is little empirical evidence to substantiate such regulations. Being prohibited from driving puts significant limitations on independence, employment opportunities, and quality of life.3–5 In some European countries (e.g., The Netherlands, Belgium6 and recently in the UK7), people with HH may be licensed after a successful (specialized) on-road test.
Lack of stability in steering and poor lane positioning were cited as the main reasons for the failure of drivers with HH in on-road tests in two recent studies.6,8 Given that drivers with HH are likely to have difficulty in detecting objects on the blind side, it is surprising that neither of these studies reported any interventions (i.e., the tester had to take control of the vehicle) due to failures in detecting potentially hazardous traffic events on the blind side. The drivers with HH may have been compensating effectively by scanning to the blind side, or the test routes may have provided insufficient opportunities for such events to occur. However, in a recent presentation about an on-road evaluation of drivers with HH on the busy streets of Ghent (Belgium), 22 (34%) of 64 interventions were due to failures in reacting to bikes, other vehicles, and pedestrians, while 24 (38%) were due to problems with steering or incorrect lane position.9
Simulators provide a safe, controlled environment in which many potentially hazardous events can be reliably presented to all drivers. However, previous simulator studies of drivers with HH have either included insufficient unexpected events in a short assessment10,11 (e.g., the appearance of a single deer in 3 minutes of test driving11), or have used an unrealistic detection task that was essentially a visual fields evaluation.12,13 In one study subjects drove at high speed along a straight road while responding to peripheral lights,12 and in another, subjects performed a central steering task (keeping a vertical line in the middle of the number plate of the vehicle ahead on the video sequence) while responding to peripheral traffic sign symbols.13 In both these studies, the driving task was likely to promote central fixation (similar to maintaining gaze on the central target during perimetry), and the peripheral targets appeared at fixed positions on the simulator display such that they would have been perceived as moving with the vehicle (as if on the windshield), rather than moving separately from it.
In the present study, we evaluated detection performance of HH and normally sighted (NV) drivers in a simulator using a more realistic task: detection of pedestrian figures while engaged in typical driving maneuvers over an extended period (2 hours). Pedestrians appeared at either a small or a large eccentricity (4° or 14°) in a variety of situations. We examined the effects of vision group (HH or NV), side of presentation (seeing or blind side), and eccentricity (4° or 14°) on detection rates and response times. We hypothesized that drivers with HH would demonstrate poorer detection of pedestrians that appeared on their blind side than on their seeing side (i.e., fewer detections and longer response times) and would be worse at the larger than the smaller eccentricity (as eye or head scanning may more easily compensate for field loss at small eccentricities). Hazard detection at intersections may be particularly difficult for drivers with HH, as a very wide field (at least 180°) must be scanned; therefore we also evaluated detection performance of HH and NV drivers at intersections.
Methods
Participants
People with HH were recruited in order of referral from local clinics. All potential participants agreed to be screened, but many did not meet the study criteria. Inclusion criteria were: complete HH, defined as no more than 5° of residual vision on the hemianopic side of the vertical meridian within 30° above and below fixation, as measured with a kinetic V4e target in a Goldmann perimeter14; no visual neglect (Bells test15 and Schenkenberg Line Bisection test16); no significant cognitive decline (Mini Mental State Examination [MMSE]17 test ≥ 24); visual acuity of 20/40 or better in each eye with the habitual correction; at least 5 years of driving before the onset of the HH and no more than 7 years since stopping driving. Of 29 individuals screened, 14 were excluded (7 had incomplete HH, 3 failed the MMSE, 3 lacked driving experience, and 1 exhibited visual neglect) and 3 started, but did not complete the study (one had simulator discomfort and two failed to attend the second driving session). Thus, 12 participants with HH completed the study. By chance, there were six with right HH (RHH) and six with left HH (LHH).
After each participant with HH completed the study, a normal vision (NV) participant of the same sex, age (within 3 years), and years of driving experience (within 5 years) was enrolled, thereby achieving a comparison group with characteristics similar to those of the HH group. NV drivers had visual acuity of 20/40 or better in each eye, and no visual abnormalities. None of the participants had previous experience using our driving simulator. None had physical impairments that prevented them from using the standard vehicle controls (gas and brake pedals, steering wheel, and horn). The study was conducted in accordance with the tenets of the Declaration of Helsinki and was approved by internal review boards at both the Schepens Eye Research Institute and the Boston VA Medical Center.
Driving Simulator
The driving simulator has been detailed previously.18 In brief, we used a simulator (PP1000-x5; FAAC Corp., Ann Arbor, MI), which has five 29-in. CRT monitors (1024 × 768 resolution at 60 Hz) providing a 225° horizontal by 32° vertical field of view, and all the usual controls found in an automatic transmission car. Software continuously recorded (at 30 Hz) usage of all vehicle controls, and locations of the participant’s vehicle and all other entities in the virtual world.
Procedure
Participants completed two driving simulator sessions. Each session comprised six different drive routes: four on city roads (30 mph) and two on rural highways (60 mph). Different routes were used at the two sessions. Each drive was designed to be completed in 8 to 10 minutes when driving at the posted speed limit. Routes included a variety of traffic situations and vehicle maneuvers. Prerecorded, spoken audio cues triggered by the position of the car in the virtual world were used to direct the driver. The cues included instructions to turn left or right at the next intersection, and instructions to change lanes to the left or right. Rural drives were on two-lane roads (one lane in each direction) with oncoming traffic, some long curves, but no turning or passing maneuvers. The scenery was predominantly green hills with clumps of trees. City drives were on two- and four-lane roads, and one-way streets, with oncoming and passing traffic and included turn maneuvers, following sequences (following a lead police car for approximately 2 minutes) and passing/overtaking maneuvers. The scenery included houses, shops, and businesses typical of a mid-sized town.
The two simulator sessions were conducted 1 week apart. Because of fatigue and simulator discomfort, two drivers with HH attended on three occasions (each 1 week apart). Participants wore habitual vision corrections (glasses or contact lenses) while driving in the simulator. Two investigators were present at all simulator sessions; they completed observer forms for each test drive noting traffic violations, curb hits, and any other unusual driving behaviors or unexpected events.
Each session started with a period of acclimation to the driving simulator. This began on relatively straight rural roads with no traffic, and progressed to city roads with turns and oncoming traffic. At specific points during the acclimation drives, participants rated their physical comfort and their ability to control the vehicle on 10-point scales (range: 1, very bad, to 10, excellent). These ratings, along with the investigators’ judgment of the participant’s vehicle control, were used to determine whether the participant should have additional time to improve vehicle-handling skills or should proceed to the next stage of the assessment.
Once acclimated to the simulator (mean time, 19 minutes, SD 13), participants were introduced to the pedestrian-detection task (described later), which they practiced during an introductory city drive that included all the elements of the test drives. Participants drove on the right side of the road and were instructed to drive the introductory and all subsequent drives in a manner that “resembled (their) actual driving behavior as much as possible” and “to obey all standard rules of the road.” Participants then completed the six scripted test drives. The drive sequence was counterbalanced to control for order effects. NV participants drove the same sequence of drives as the HH driver with whom they were matched. Before each rural drive, participants were reacclimated to controlling the vehicle at the higher speed by driving at highway speeds for approximately 5 minutes. Participants were encouraged to step out of the simulator and take a short break after every second drive; testing resumed when the participant indicated. The time to complete the whole simulator session (acclimation and test drives) ranged from 2 to 3 hours. Participants were not given feedback about their detection performance until after the final drive in the last simulator session.
Roadway Pedestrians
During each drive, there were 12, 2-m-tall roadway pedestrian (R-Ped) figures that appeared along the roadside every 15 to 60 seconds, wearing a white shirt and blue trousers (total of 72 R-Peds per session). Each R-Ped appeared suddenly, remained stationary, and disappeared once the car passed. Participants were instructed to honk the horn as soon as they detected an R-Ped (horn buttons were located at the 3 and 9 o’clock positions on the steering wheel). To introduce some variety into the task, we programmed R-Peds to appear in various situations: on straight road sections when little else was happening (48/72), when there was a gaze-attracting event such as an oncoming emergency vehicle with flashing lights (n = 12), while following a lead police car (n = 4), and when driving around curves on rural highways (n = 8). To limit association of R-Ped appearances with gaze-attracting events, each drive had one or more of these events without a pedestrian appearance. Pedestrians always appeared in relevant and ecologically valid locations.
R-Peds appeared 67 m (220 ft) from the driver in city drives and 134 m (440 ft) from the driver in rural drives. At these distances, the vertical visual angle subtended by the pedestrian was 1.5° and 0.75°, respectively. Assuming compliance with the posted speed limit, the driver had up to 5 seconds to detect each R-Ped. Five seconds is twice the perception–brake time (time from hazard detection to first stepping on the brake) recommended by the American Association of State Highway and Transportation Officials (AASHTO) for the design of safe stopping sight distances (i.e., the length of roadway ahead visible to the driver).19 The AASHTO guideline includes up to 90% to 95% of the general population for a brake response in good weather and with high visibility.20 R-Peds appeared at small (~4°) and large (~14°) eccentricities to the right and left of the presumed direction of gaze (Fig. 1). These eccentricities were selected to represent situations in which the R-Ped could be a collision hazard for the driver. At 67 m, 4° is about the width of one driving lane, and a pedestrian at this eccentricity could represent a person about to step off the curb, whereas an R-Ped at 14° eccentricity could represent a runner or bicyclist. If the runner were to move at 7 mph (3 m/s) toward the road, it would collide with the participant’s vehicle.
Figure 1.

The four locations at which an R-Ped might appear with respect to the driver in a city drive. The car width was 1.4 m and the travel lane width was 4.0 m.
Intersection Pedestrians
In addition to R-Peds, there were five intersection pedestrians (I-Peds) in each driving session. I-Peds appeared at T intersections in city drives only. There were five I-Ped types, and one of each was included in each session (AL, AR, BL, CL, and DR; the subscript indicates turn direction; Fig. 2). We programmed cross traffic on intersections with and without I-Peds; therefore, there was always a possibility that there would be a moving car in the vicinity of an I-Ped.
Figure 2.

I-Ped placements (A–D) to assess the effect of HH on detection of potential hazards for a right (R) or left (L) turn. Objects in the direction of A and D could be a hazard for a right-turning vehicle. Objects at or near A, C, and B could be a hazard for a left-turning vehicle. Thick lines: the outline of the recommended clear sight triangle for a stop-controlled intersection at a 30-mph cross street.19 The driver would have to scan almost 90° to the left and right to view the whole area within the sight triangle. Schematic is approximately to scale.
In the design of intersections, AASHTO recommends the use of clear sight triangles to ensure that the motorist has an unobstructed view of potentially conflicting vehicles on the cross street.19 In the case of an intersection with a stop sign, the sight triangle ensures that the stopped driver is able to see vehicles approaching from either direction, at sufficient distance to allow crossing or turning maneuvers; the driver would have to scan almost 90° to the left and right to view the whole area within the sight triangle (Fig. 2). Based on the recommended sight distance for a stop-controlled intersection with a 30-mph cross street,19 I-Peds were placed at 67 m along the sidewalk from the intersection at location A (to the left) and D (to the right) to evaluate whether the drivers in the LHH and RHH groups were scanning sufficiently far (~90°) to their respective blind sides. Vehicles in the direction of A could be a hazard for both left- and right-turning drivers; therefore, detection at this location was tested for both turn directions (AL and AR). Vehicles or pedestrians in the direction of D on the near side of the street would not be a hazard for left-turning drivers, but would be in the blind field of a right-turning driver with RHH; therefore detection at D was tested on a right turn only. Our primary hypotheses were that drivers with LHH would have lower detection rates than NV drivers for I-Peds AL and AR, and drivers with RHH would have lower detection rates than NV drivers for I-Ped DR.
In addition, we placed I-Peds at locations B and C to evaluate whether HH field loss affects detection in more central parts of an intersection. When drivers with LHH make a large scan to the right (their seeing side) the blind hemifield obscures everything in the central and near right areas of the intersection (at least for a short period). Hence, a vehicle near location C (just to the right on the far side of the intersection; Fig. 2) could be a hazard for a left-turning driver with LHH. We hypothesized that drivers with LHH would have lower detection rates than NV drivers for an I-Ped at C on a left turn (CL). As I-Ped CL was on the blind side of the drivers with RHH, our secondary hypothesis was that they would also have lower detection rates for this I-Ped than would NV drivers. For balance, we also evaluated detection of an I-Ped at B (just to the left on the far side of the intersection; Fig. 2). When scanning far to the left (the seeing side) before making a turn, the blind hemifield of a driver with RHH may obscure a vehicle or pedestrian near this location, which could be a hazard on a left turn. However, when executing the left turn, an I-Ped at B should be in the direct line of sight of all drivers (RHH, LHH, and NV) for at least part of the maneuver; therefore, our primary hypothesis was that there would be no differences in detection performance among those with RHH or LHH and NVs for I-Ped BL.
Each I-Ped appeared as the driver was slowing to a stop at the intersection and disappeared as soon as the driver had completed a turn; only one I-Ped appeared at a time. Participants indicated detection by honking the car horn. They were allowed to press the horn after they completed the turn, rather than as soon as detection occurred, so that searching for the horn button (on the turned steering wheel) did not affect their steering control during the turn. As participants were permitted to respond to I-Peds after completing a turn maneuver, response times were long and variable, and without real meaning; therefore, only detection rates were analyzed.
Other Driving Performance Measures
In addition to the detection performance measures, we evaluated other driving behaviors including speed, failure to stop at stop signs and red traffic lights, crashes, head movements,21 steering,21,22 and lane position.21,22 Traffic violations and crash details were scored manually during the simulator assessment. Speed, steering, and lane position were derived from simulator data output.
Data Analyses
Horn-press responses were analyzed to determine detection rates (number of pedestrian detections as a percentage of total pedestrian presentations) and response times (period between the pedestrian appearance and the horn honk). These measures were our primary dependent variables. In the main analyses of R-Ped detection performance, we examined the effects of vision status (NV or HH), side of presentation (blind or seeing), and eccentricity (small or large) on detection rates and response times. Side of presentation (blind or seeing) was allocated to each NV subject according to the matched driver with HH (these labels were not applied in any literal sense, but for analysis purposes only). R-Ped detection rates for each subject were calculated for each side and eccentricity and then analyzed by using nonparametric statistics. False-detection rates (horn presses in response to objects other than pedestrians) were very low and similar for the NV and HH groups (total 24 and 26 false honks, respectively, out of 1848 presentations for each group).
R-Ped response time distributions for each subject were positively skewed and differed significantly from a normal distribution. Median response times were therefore calculated to provide summary measures for each subject for each side and eccentricity combination. Medians were only calculated when there were at least three R-Ped detections at each side and eccentricity. NV drivers always had three or more detections. The same was true for drivers with HH on the seeing side. However, because of the low number of detections on the blind side, median R-Ped response times could only be calculated at blind-side eccentricities for the following numbers of drivers with HH: 12 (city-small eccentricity), 11 (rural-small), 8 (city-large), and 4 (rural-large). An additional driver with HH who had hemiparesis was excluded due to outlier response time data, leaving only 11, 10, 7, and 3 drivers with HH, respectively. The median R-Ped response times for NV and drivers with HH were, in general, normally distributed (Shapiro-Wilks test, P > 0.18 for data included in ANOVA); therefore parametric statistics were used when analyzing the group response time data. All analyses were also performed with nonparametric tests, and the results were similar.
As detailed above (see pedestrian detection task section), response times were long and variable for the I-Ped detections; therefore, only detection rate data were examined. Differences in detection rates between NV and drivers with RHH or LHH were evaluated for each of the five I-Ped types.23 As there were only two occurrences of each of the five I-Peds for each subject (one in each session), detection rates for each I-Ped were calculated for each vision group, rather than separately for each subject (total number of detections as a percentage of the total number of presentations in each group).
As a precursor to performing the main analyses and to determine whether there were any learning effects, we evaluated the effect of session (first or second) on detection rates and response times. The only significant between-session difference was for NV drivers: reaction times were slightly shorter at the second than the first session: session one, mean across all drives and eccentricities 0.85 seconds (SD 0.18); session two, 0.78 seconds (0.16); mean difference, 0.07 seconds (95% CI: 0.01–0.13), t(11) = 2.50, P = 0.03. In subsequent analyses, data were collapsed across the two sessions.
Results
Sample Characteristics
The HH group included six current drivers (driving at least on a limited basis), four who had stopped driving within the past 12 months, and two who had stopped driving within the past 4 to 7 years. There was an equal number of participants with RHH and LHH, with an equal number of current drivers in these two subgroups. Stroke was the main cause of the HH, with the time since onset of the HH ranging from 0.3 to 28 years (Table 1). Only one driver in the HH group had macular sparing. Two of the HH group had left paresis but were able to use the right hand to control the steering wheel and press the horn button (located on the steering wheel). Both of these drivers were included in the detection rate analyses, but were excluded from the response time analyses: one due to insufficient detections at the large eccentricity, and the other because the blind- and seeing-side response times were outliers (e.g., 3.35 and 1.90 seconds) for city-large eccentricity on the blind and seeing sides, respectively (compare with the remaining HH group in Fig. 6). At the time of the study, two participants with LHH were using peripheral prism glasses24,25 (that provide visual field expansion) when walking; however, they were not permitted to wear these glasses during the simulator assessments.
Table 1.
Characteristics of All Participants and the Subset Included in the Response Time ANOVA
| All Participants |
Participants Included in Response Time ANOVA |
|||||
|---|---|---|---|---|---|---|
| HH (n = 12) | NV (n = 12) | Test for Difference between Groups | HH (n = 7) | NV (n = 7) | Test for Difference between Groups | |
| Current driver n (%) | 6 (50) | 12 (100) | Fisher’s Exact Test | 4 (57) | 7 (100) | Fisher’s Exact Test |
| P = 0.014 | P = 0.192 | |||||
| Male n (%) | 9 (75) | 9 (75) | N/A | 5 (71) | 5 (71) | N/A |
| Age, y | 50 (13) | 51 (13) | t(22) = 0.217 | 45 (12) | 47 (13) | t(12) = 0.274 |
| Mean (SD), range | 31 to 72 | 33 to 70 | P = 0.830 | 31 to 66 | 33 to 67 | P = 0.788 |
| MMSE score | 28 (1) | 28 (2) | t(22) = 0.273 | 28 (1) | 28 (2) | t(12) = 0.781 |
| Mean (SD), range | 26 to 30 | 25 to 30 | P = 0.787 | 26 to 30 | 25 to 30 | P = 0.450 |
| Binocular visual acuity* | 20/19 | 20/14 | t(22) = 3.041 | 20/18 | 20/13 | t(12) = 2.185 |
| Mean, range | 20/14 to 20/29 | 20/9 to 20/20 | P = 0.006 | 20/14 to 20/22 | 20/9 to 20/20 | P = 0.049 |
| Right hemianopia, n (%) | 6 (50) | N/A | N/A | 4 (57) | N/A | N/A |
| Hemianopia caused by stroke, n (%) | 10 (83) | N/A | N/A | 7 (100) | N/A | N/A |
| Time since onset hemianopia, y, median (IQR) | 3.5 (0.9 to 7.6) | N/A | N/A | 3.5 (0.8 to 8.0) | N/A | N/A |
Visual acuity was measured and analyzed in logMAR units; logMAR values were converted to Snellen notation for ease of interpretation in this table. Significant results are shown in bold type.
Figure 6.

Median response times for drivers with HH at small and large eccentricities on the blind and seeing sides in city drives (only the seven drivers with HH in the ANOVA are shown). At both the small and large eccentricities on the blind side, all seven drivers with HH had response times longer than 2 SDs above the NV mean. This was also the case on the seeing side for two drivers with HH. Solid line: 2 SD above NV mean; dashed-dotted line: AASHTO 2.5-second guideline.
As planned, the HH and NV groups were not significantly different in terms of age, sex, and MMSE scores (Table 1). All participants had started driving at 18 years or younger; the only exceptions were one with HH and one NV, who started driving at the ages of 23 and 27 years, respectively.
R-Ped Detection Rates
There were no significant differences in the detection rates of those with RHH or LHH for R-Peds at small or large eccentricities on either the blind or seeing sides (Mann-Whitney U test, Z(12) < 1.6, P > 0.13); therefore, drivers with RHH and those with LHH were treated as one group in R-Ped detection rate analyses. Because of the effect of drive type (Appendix), the main R-Ped detection rate analyses were performed for city drives only, rural drives only, and data collapsed across city and rural drives; all analyses included 12 NVs and 12 drivers with HH. Because these three sets of analyses showed similar effects of side, eccentricity, and vision status, in the interest of brevity, we report only detection rate results for data collapsed across city and rural drives.
Detection rates of the HH group for R-Peds on the blind side were significantly lower than detection rates for R-Peds on the seeing side, and were significantly lower than those of the NV group (Fig. 3; Table 2). However, detection rates on the seeing side were not different to those of NV drivers (Fig. 3; Table 2). As expected, there were no differences in detection rates on the “blind” and “seeing” sides for NV drivers (Fig. 3; Table 2). There was considerable between-subject variability in detection rates of the drivers with HH on the blind side, ranging from 6% to 86% at the large eccentricity, and 32% to 100% at the small eccentricity (Fig. 4). Only 1 driver’s blind-side detection performance in the HH group approached that of the NV drivers at both small and large eccentricities (100% and 86%, respectively). By comparison, the between-subject variability for detection rates on the seeing side was much lower, ranging from 97% to 100% at the small eccentricity and 79% to 100% at the large eccentricity (Fig. 4).
Figure 3.

R-Ped detection rates for data pooled across city and rural drives for 12 NV and 12 drivers with HH. Blind-side detection rates of drivers with HH were significantly lower than those of NV drivers at both small and large eccentricities (P < 0.001); however seeing-side detection rates were similar to those of NV drivers. Thick horizontal line within the box is the median; the vertical extent of the box is the interquartile range (IQR); vertical lines at box ends represent the largest nonoutlier data points within 1.5× IQR; circles are outliers (1.5× to 3× IQR); and triangles are extreme outliers (>3× IQR).
Table 2.
Summary Data and Details of Statistical Tests for the Main Comparisons of NV versus HH Groups, Blind versus Seeing Sides, and Small versus Large Eccentricities
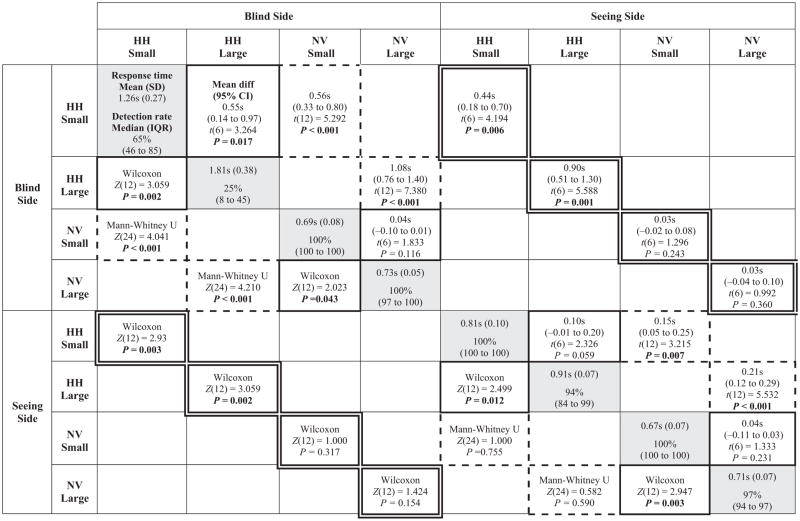 |
Summary data are on the main diagonal (shading). Details of statistical tests are above the main diagonal for response times (city only; 7 NV and 7 HH), and below the diagonal for detection rates (city and rural combined; 12 NV and 12 HH). Empty cells are irrelevant comparisons. Cell borders indicate which comparisons are being made: vision group (single dashed line); side (double solid line); and eccentricity (single solid line). For significant results the probability is in bold type.
Figure 4.

Scatterplot of R-Ped detection rates for 12 drivers with HH at small and large eccentricities on the blind and seeing sides (data pooled across city and rural drives). Blind-side detection rates correlated highly between the two eccentricities (Spearman r = 0.94, P < 0.001). Vertical and horizontal lines: minimum detection rates of NV drivers at small and large eccentricities, respectively. Circled points: participants with HH who wore peripheral prism glasses as a visual field expansion aid when walking; these glasses were not worn during the driving simulator sessions.
Blind-side detection rates of the HH group were much higher for R-Peds at the small than the large eccentricity (Fig. 3; Table 2). This eccentricity effect was also present in the detection rates of the NV group and the seeing-side rates of the HH group, but the magnitude of the difference was much smaller (Fig. 3; Table 2). Blind-side detection rates at the small and large eccentricities were highly correlated in the HH group (Spearman r = 0.94, P < 0.001; Fig. 4).
R-Ped Response Times
Response time data were analyzed with a repeated-measures ANOVA with vision group (NV or HH) as the between-subjects factor and side of presentation and eccentricity as the within-subjects factors. For reasons described above, blind-side, large-eccentricity response time data were available for only a limited number of the HH group (seven for city and three for rural driving). Therefore, the ANOVA was performed with data from city drives only for the seven drivers with HH and their seven matched NV counterparts (see Table 1 for sample characteristics). The seven drivers with HH had better blind-side detection rates than did the five who were excluded: median (IQR) small eccentricity, 80% (62%–91%) and 43% (35%–64%), respectively, Mann-Whitney U test, Z(12) = 2.355, P = 0.018; large eccentricity, 40% (29%–53%) and 8% (6%–12%), respectively, Z(12) = 2.847, P = 0.003. This difference in blind-side detection rates was expected, as response times were calculated only when there were at least three detections for each side and eccentricity. The included and excluded drivers in the HH group had similar seeing-side detection rates (P > 0.30) and similar sample characteristics (with the exception of a trend for the included drivers with HH to be younger: t(10) = 1.87, P = 0.091).
There was a highly significant main effect of vision group on response times to R-Peds (F(1,12) = 99.95, P < 0.001). Response times of drivers with HH were longer than those of NV drivers on both the blind and seeing sides, at both small and large eccentricities (Fig. 5; Table 2). On the seeing side, there were only two in the HH group with response times at both the small and large eccentricity that were more than 2 SDs longer than the NV mean (Fig. 6). However, on the blind side, all seven drivers with HH had response times at both the small and large eccentricities that were more than 2 SDs longer than the NV mean.
Figure 5.

R-Ped response times from city drives for the seven NV and seven drivers with HH included in the ANOVA. Response times of drivers with HH were significantly longer than those of NV drivers on both the blind and seeing sides, at both small and large eccentricities (P < 0.001). This figure shows medians and IQRs in boxplot format (details as in Fig. 3); means and SDs are given in Table 2.
There was also a highly significant main effect of side on response times to R-Peds, and a strong interaction between vision group and side (F(1,12) = 47.48, P < 0.001; F(1,12) = 40.35, P < 0.001, respectively). For drivers with HH, response times on the blind side were significantly longer than on the seeing side; however, NV drivers, as expected, did not show any differences in response times between the two sides (Fig. 5; Table 2).
Finally, there was a significant main effect of eccentricity on response times to R-Peds and an interaction between vision group and eccentricity (F(1,12) = 18.91, P = 0.001; F(1,12) = 11.63, P = 0.005, respectively). Drivers in the HH group had longer response times to R-Peds at the large than the small eccentricity, especially on the blind side (Fig. 5; Table 2). However, there was no significant difference in response times at the two eccentricities for NV drivers (Fig. 5; Table 2). For the seven drivers with HH in the ANOVA, there were no significant correlations between blind-side or seeing-side response times at the small and large eccentricities (Ps > 0.50; Fig. 6).
I-Ped Detection Performance
I-Ped detection analyses included data for all drivers in the HH and NV groups. Detection rates for I-Peds at location A (at the extreme left of the intersection, see Fig. 2), were evaluated for both left and right turns. On the left turn (I-Ped AL), detection rates of drivers with LHH were significantly lower (as hypothesized) than those of NVs and drivers with RHH (Fig. 7, Table 3). However, on the right turn (I-Ped AR), the detection rates of drivers with LHH were similar to those of the other vision groups. Comparing detection rates for I-Peds AL and AR for each vision group: NVs had significantly higher detection rates for AL than AR (z = 2.62, P = 0.004); those with LHH tended to have higher detection rates for AR than AL (z = 1.45, P = 0.073); and those with RHH had similar rates for AR and AL (z = 0.59, P = 0.277).
Figure 7.

Detection rates for I-Peds (inset: approximate I-Ped locations). For the I-Ped at A, detection rates of drivers with LHH were significantly lower than those of NVs and drivers with RHH on a left turn (AL) but not a right turn (AR). For the I-Ped DR, detection rates of drivers with RHH were significantly lower than those of NVs and drivers with LHH on a right turn. For the I-Ped CL, detection rates of drivers with RHH were significantly lower than those of NV drivers on a left turn. Error bars, 95% confidence limits.
Table 3.
Predictions and Outcomes for I-Ped Detection Rate Analyses (12 HH and 12 NV)
| Primary Prediction |
Secondary Predictions |
|||||
|---|---|---|---|---|---|---|
| Prediction | Outcome | Statistics* | Prediction | Outcome | Statistics* | |
| AL | LHH < NV | LHH < NV† | z = 4.90, P < 0.001 | LHH < RHH | LHH < RHH† | z = 2.45, P = 0.007 |
| RHH = NV | RHH < NV | z = 2.56, P = 0.005 | ||||
| AR | LHH < NV | LHH = NV | z = 1.21, P = 0.113 | LHH < RHH | LHH = RHH | z = 0.43, P = 0.332 |
| RHH = NV | RHH = NV† | z = 0.69, P = 0.245 | ||||
| BL | RHH = NV | RHH ≈ NV† | z = 1.50, P = 0.067 | LHH = NV | LHH = NV† | z = 0.00, P = 1.00 |
| CL | LHH < NV | LHH < NV† | z = 1.88, P = 0.030 | RHH < NV | RHH < NV† | z = 2.85, P = 0.002 |
| DR | RHH < NV | RHH < NV† | z = 4.59, P < 0.001 | RHH < LHH | RHH < LHH† | z = 3.69, P < 0.001 |
| LHH = NV | LHH = NV† | z = 0.34, P = 0.367 | ||||
For significant results the probability is in bold type.
For each I-Ped, there was 1 presentation per participant per session (total of 24 for NV, 12 for LHH, and 12 for RHH across both sessions).
Outcomes that agree with predictions.
As predicted, for I-Ped BL, detection rates were better than 90% for all vision groups (NV, LHH, and RHH), while at CL both the LHH and RHH groups had lower detection rates than the NV group (Fig. 7, Table 3). For I-Ped DR (at the extreme right of the intersection), the RHH group had poor detection rates (8%), significantly worse than those of the NV and LHH groups.
Factors Affecting Detection Performance in HH
We examined the following factors that might affect detection performance: age (NV and HH), driving status (whether or not currently driving; HH only), and time since onset of hemi-anopia (HH only). Only age showed any associations with detection performance; older participants with HH had lower blind-side R-Ped detection rates (Fig. 8; small eccentricity: n = 12, Spearman r = −0.71, P = 0.009; large eccentricity: n = 12, Spearman r = −0.64, P = 0.025). Despite the narrow range of R-Ped detection rates for NV drivers, there was also a significant negative correlation between age and detection rates for this group (detection rate data pooled across both sides and eccentricities: n = 12, Spearman r = −0.74, P = 0.006). There were no significant associations between age and response times for either the HH or NV group.
Figure 8.

Blind-side detection rates for R-Peds as a function of age for drivers with HH.
Does Better Blind-Side Detection Result in Poorer Seeing-Side Detection?
It is possible that scanning to compensate for the hemifield loss could compromise detection on the seeing side. To address this question, we compared the seeing-side detection performance of the four drivers with HH with better blind-side detection rates (≥ 80% at the small eccentricity; Fig. 4) to that of the other eight drivers with HH. There were no significant differences in seeing-side detection rates and response times between these two groups (P > 0.20). Drivers with HH with better blind-side detection rates did not have poorer seeing-side detection rates, nor longer seeing-side reaction times. The only common characteristic of the drivers with HH with better blind-side detection performance was that they were younger on average than the other eight drivers with HH (as would be expected from the correlation between detection rates and age).
Other Detection-Related Driving Performance Measures
The overall average speed of drivers with HH was lower than that of NV drivers in both city and rural driving: mean (SD) HH city: 23 (3) mph and NV city 26 (3) mph, t(22) = 2.13, P = 0.044; HH rural: 45 (5) mph and NV rural: 51 (4) mph, t(22) = 3.62, P = 0.002. Older participants with HH drove more slowly than the younger ones did, especially in the city (city: r = −0.874, P = 0.001; rural r = −0.454, P = 0.138); but there were no correlations between age and speed for NV drivers (P > 0.5). To evaluate whether there were any associations between driving speeds and blind-side detection rates for the drivers with HH, partial correlations (controlling for age) were calculated between average speed and detection rates at small and large eccentricities for city and rural drives. No significant correlations were found (P > 0.20); thus, drivers with HH with better detection rates did not drive more slowly than drivers with HH with poorer detection rates.
Drivers with HH had slightly higher rates than did NV drivers of failing to stop at stop signs: median (IQR) HH, 1.6% (0.0%–2.8%); NV, 0.0% (0.0%–0.0%); Mann-Whitney U test, Z(24) = 2.354, P = 0.05. However the rates of failing to stop at red traffic lights were not different between the two groups: median (IQR) HH, 6.3% (2.6%–9.5%); NV 4.9% (2.6%–7.2%) of all intersections with traffic lights; Z(24) = 0.873; P = 0.410. A total of six crashes occurred over the course of the study (Appendix): one driver with RHH crashed three times; one driver with LHH crashed once; and two NV drivers each crashed once.
Discussion
As hypothesized, drivers with HH exhibited significantly lower R-Ped detection rates on the blind side than did NV drivers (especially at the large eccentricity); however, the main characteristic of the HH detection rate data were the wide variability among subjects (from 6% to 100%). Age was the main factor accounting for the variability: older drivers with HH had lower detection rates than did younger drivers with HH, indicating a reduction in the ability to compensate for the field loss with increasing age.
For the majority of the participants with HH, R-Ped detection rates were so low at both blind-side eccentricities that they seem inconsistent with safe driving and suggest only limited compensation for the field loss (Fig. 4). However, one subject with RHH (with macular sparing) detected 100% of R-Peds at the small eccentricities and 86% at the large eccentricities. This level of performance was not different from that of the NV drivers and may represent compensation ability consistent with safe driving. However, the I-Ped detection rates of this subject were poorer than those of the NV drivers (50% for all I-Peds and she detected neither of the two occurrences of the I-Ped DR on her blind side), suggesting that this driver may benefit from specific training on scanning at intersections before attempting an on-road driving test. This 31-year-old had been driving since the age of 16 (typically 6000 miles per year), but had stopped 3 months before the study after a stroke that caused the HH. Anecdotal observations indicated that when driving in the simulator she was constantly scanning to the right (blind) side using lateral eye movements, to a much greater extent than observed with any of the other drivers with HH. However, an eye tracker had not been integrated into the driving simulator at the time of the study, so we could not verify these observations with eye movement recordings. Preliminary analyses of head movement recordings suggest that she failed to head scan to the blind side at some intersections, which may account for the poor I-Ped detection rates.26
Although the blind-side response times of drivers with HH were more than 2 SDs longer than the NV mean, they all fell within the 2.5-second AASHTO perception–brake guideline19; the only exceptions were two drivers with response times of 2.77 and 4.33 seconds for blind-side, large-eccentricity R-Peds in rural driving. In a retrospective review of drivers with a variety of vision impairments (including HH), the group who were considered unfit to drive had longer response times in a simulator-based detection task than did the group who were considered fit to drive13; however, detection rate data were not reported. Longer response times may compromise safety, but it is the failure to detect that is the more critical safety issue when evaluating fitness to drive.
To achieve high levels of blind-side detection, drivers with HH have to scan to the nonseeing side. Such scanning could result in reduced detection performance on the seeing side, but drivers with HH with better blind-side detection rates did not have poorer seeing-side detection rates and did not have longer seeing-side response times. Furthermore, although seeing-side response times of drivers with HH were slightly longer than those of NV drivers (0.15 seconds, ~20% at the small eccentricity), detection rates were not different.
Intersections are challenging, even for drivers with a full field of vision. In 2007, at least 22% of fatal accidents in the United States occurred at intersections.27 The low detection rates of drivers with HH for the I-Peds at the extreme positions on their blind side (I-Peds AL and AR for LHH, and DR for RHH) suggest that they were not scanning far enough into the blind side before making a turn. Locations A and D are within the range of the clear sight distances suggested by AASHTO for the safe design of intersections19; hence drivers with HH should have been scanning this far to their blind side. To encourage the scanning patterns that might occur in on-road driving, we programmed cross traffic on many of the intersections (both with and without I-Peds, so no association could be made). Therefore it seems unlikely that the low rate of I-Ped detection was because the drivers with HH believed that it was unnecessary to scan before making a maneuver at an intersection.
A recent on-road study28 reported that NV drivers spent about twice as much time scanning to the far left (>45°) on a right than a left turn (e.g., 40% and 21%, respectively, at a high-crash intersection). These findings suggest that drivers tune their leftward scanning to the perceived level of hazard and that detection performance might be better at location A on a right than a left turn. Of note, there is evidence of this behavior in the detection rates of drivers with LHH, but not those with RHH or the NVs. Drivers with LHH had significantly better detection rates for I-Peds at the extreme left position when turning right (AR 55%) than when turning left (AL 25%), possibly adjusting the magnitude and/or number of leftward (blind-side) scans to the expected time in the lane containing traffic from the left. However, NV drivers showed behavior opposite that of the drivers with LHH, with higher detection rates for AL than AR, possibly because AL was in the turn direction and the pedestrian did not disappear until the end of the maneuver.
By comparison, on-road studies28,29 report that NV drivers spend relatively little time scanning to the right on a right turn (e.g., only 1% to the far right and 10% to the near right28). In agreement with this, we found slightly poorer detection performance for NV drivers for I-Ped DR on the right than for I-Ped AL on the left of the intersection (88% and 100%, respectively, P = 0.04). In particular, drivers with RHH had very low detection rates for I-Ped DR (8%) on the blind side, suggesting that they did not scan sufficiently far into the right field before or during the turn, perhaps because they did not perceive as hazardous objects that would be in their travel lane after they completed a right turn. However, it is important for any driver (but especially a driver with RHH) executing a right turn to preview the road in the turn direction to ensure avoidance of any objects (especially pedestrians and bicyclists) in the travel path.
Of the two I-Peds near the center of the intersection, detection rates for BL were better than 90% in all vision groups (NV, LHH, and RHH), but detection rates for CL were only 75% and 58% in the LLH and RHH groups, respectively. These findings are most likely because BL was positioned just to the left of straight ahead at the intersection and would have been in the direct line of sight during at least part of the left turn maneuver, whereas CL was just to the right and would never have been in the line of sight during the turn maneuver. Detection rates of drivers with RHH were significantly lower than those of NV drivers for CL, providing additional evidence of detection failures at a small eccentricity in the (near) blind hemifield. Failure to detect a car around the position of CL when turning left could result in an accident. Failure to detect the I-Ped CL by drivers with LHH can only be expected if they scan further to the right placing the C position within the blind hemifield. This occurred in 25% of the cases and thus represents another situation in which drivers with LHH may need more training to assure detection of potential hazards at intersections. Overall, our I-Ped detection results suggest that drivers with HH need training to scan at least 90° to the blind side and training to check the more central areas of the intersection before making a turn.
In this study, I-Peds were used as a surrogate for vehicle detection, which may have resulted in lower detection rates than if the detection target had been a moving car. Although this is a limitation in the study design, it was adopted for practical reasons to ensure that the detection target was unambiguous and that only one type of target would elicit the horn-press response. In future studies we will investigate detection of moving vehicles at intersections.
Because LHH is more frequently associated with visual neglect, poorer detection responses might be expected for drivers with LHH than for those with RHH. Although we tried to exclude all participants with neglect, we cannot be certain that some participants who completed the driving tests did not have some mild neglect symptoms. However detection performance was not different between the two HH groups. This may suggest that the tests (Bells test15 and Schenkenberg Line Bisection test16) we used are sufficient to identify those patients who have residual neglect that might affect detection of traffic relevant objects. However, given the small sample size (six LHH and six RHH) and the high degree of between-subject variability in blind-side detection rates, the finding of no difference between drivers with LHH and those with RHH may simply reflect the lack of statistical power.
Despite the fact that the visual environment was less cluttered and there were fewer maneuvers in rural than city drives, blind-side detection rates of drivers with HH were lower and responses times longer in rural than city driving. This finding suggests that driving at higher speeds required greater attention (e.g., to control the steering) and that the attentional field (useful field of view30) may have been narrower, thereby reducing the ability to compensate for the HH. A reduction in the attentional field has been associated with both increasing cognitive load and increasing speed.30–32 The poorer detection performance of drivers with HH at higher speeds could be interpreted as evidence in support of license restrictions that prohibit visually impaired people from driving on highways.
In addition to scanning, driving slowly may be a compensatory strategy.33 Slowing down allows more time for detection of hazards and more time for a response, but driving too slowly can also be a danger to other road users. Drivers with HH with better detection rates did not drive more slowly than drivers with HH with poorer detection rates; however, participants with HH overall drove significantly slower (by approximately 12%) than NV drivers on both city and rural roads. This provided them with approximately 0.75 seconds of additional time to detect and respond to the R-Peds. In a brief report of a previous simulator study,34 drivers with HH who demonstrated performance within the NV range on a laboratory search task (classified as compensators) drove more quickly than drivers with HH with poorer search performance (classified as having exploratory deficits).
In summary, we found a very wide range of detection abilities (reflecting a very wide range of compensation abilities) in a small group of drivers with complete HH, without visual neglect and without significant cognitive decline. The majority of participants with HH had blind-side detection rates that would most likely be considered incompatible with safe driving. Detection rates were poor even at small eccentricities (4°) that could easily be covered with only a small head turn or scan to the blind side. Our findings appear to be at odds with those in several previous on-road and simulator studies of HH driving that have suggested that the primary difficulty of drivers with HH is poor steering control6,8,10 or have found no differences in driving performance between drivers with HH and NV.11 It could be that our simulator assessment was not sufficiently realistic (e.g., we used static rather than walking pedestrians) and that drivers with HH did not scan as much as they would in on-road driving. However, participants knew that their detection performance was being evaluated and probably expected a pedestrian about every minute (priming). Therefore, it seems likely that they would have actually scanned more in the simulator than they might during habitual on-road driving. Although we did not record eye movements, we did track head movements. Preliminary analyses of the head movement data confirmed that NV drivers were scanning as would be expected on the approach to intersections and that drivers with HH who failed to scan to the blind side at intersections had poorer I-Ped detection performance.26
Rather than a lack of realism in our simulator task accounting for the difference between our results and previous on-road and simulator studies,6,8,10,11 it seems more likely that those studies did not include a sufficient number of potentially hazardous events (either the route was too short or did not include sufficiently busy streets). Furthermore, in on-road studies a detection failure will be noted only if it puts the driver or other road users at risk (the number of detection failures in nonrisky situations will never be known to the experimenter/evaluator). Our results seem to be more consistent with the early simulator study by Lovsund et al.12 in which only one of six participants with a hemifield defect exhibited good detection abilities (that study used an unrealistic detection task, but nevertheless had a large number of detection events). Our findings also seem to be in better agreement with the recent on-road study by Tant,9 in which there were a relatively high number of interventions due to failures to detect potential hazards on the blind side. (That study was conducted on busy city-center streets with a high density of pedestrians, cyclists and other hazards.)
Our results underscore the importance of assessing fitness to drive of people with HH on an individual basis, either on-road or in a driving simulator using a test route that includes sufficient opportunities for the evaluation of reactions to potential blind-side hazards. Although the results of this study do not appear encouraging for people with HH who wish to resume driving (especially older drivers), the relationship of our simulator-based measures to on-road detection performance has yet to be established. Furthermore detection performance of drivers with HH may be improved through scanning training35 or the use of prism glasses.9,36 It is also possible that specific driving training with an emphasis on the necessary compensation strategies for RHH and LHH, may be a useful way to improve detection of hazards and improve safety.
Acknowledgments
Supported by National Institutes of Health Grants EY12890 (EP) and K99 EY018680 (ARB).
The authors thank Kent Higgins, Laurel Bobrow, Shabtai Lerner, and Vincent Ciaccio for help in scenario development and testing; Matthew Bronstad for helpful comments during manuscript preparation; and Joseph Rizzo (Center for Innovative Visual Rehabilitation at the Boston Veterans Administration Hospital) who provided the driving simulator facilities.
Appendix
Effect of Drive Type
Drive type affected both detection rates and response times with lower detection rates and longer response times in rural than city driving (Table A1). Detection rate differences were significant, but small in magnitude for NV drivers (4%) and drivers with HH on the seeing side (12% at large eccentricity), and were larger (45%), but only approached significance (due to the large between-subject variability) for drivers with HH at the large eccentricity on the blind side (Table A1). Response time differences between rural and city driving were significant but relatively small in magnitude for NV drivers (0.08 seconds, ~10%) and were significant and larger in magnitude for drivers with HH on the seeing side (small eccentricity 0.20 seconds, ~20%; large eccentricity 0.31 seconds, ~30%; Table A1). At the large eccentricity on the blind side, response times were 0.9 seconds (~50%) longer in rural than city driving; however, the data are for only four drivers with HH and did not reach significance.
Table A1.
Differences in Detection Performance for City and Rural Driving
| Detection Rates* |
Response Times (s)† |
|||||
|---|---|---|---|---|---|---|
| Median (IQR) | Wilcoxon | Mean (SD) | Paired t-test | Wilcoxon | ||
| NV, collapsed across side and eccentricity | City | 100% (99–100) | Z(12) = 2.682 | 0.79 (0.17) | t(11) = 4.259 | Z(12) = 2.903 |
| Rural | 96% (94–100) | P = 0.007 | 0.87 (0.18) | P = 0.001 | P = 0.004 | |
| HH, seeing side, small eccentricity | City | 100% (100–100) | Z(12) = 1.00 | 0.93 (0.27) | t(10) = 4.403 | Z(11) = 2.934 |
| Rural | 100% (100–100) | P = 0.317 | 1.13 (0.28) | P = 0.001 | P = 0.003 | |
| HH, seeing side, large eccentricity | City | 100% (96–100) | Z(12) = 2.431 | 1.06 (0.28) | t(10) = 2.015 | Z(11) = 2.045 |
| Rural | 88% (54–100) | P = 0.015 | 1.37 (0.50) | P = 0.072 | P = 0.041 | |
| HH, blind side, small eccentricity | City | 75% (58–85) | Z(12) = 1.245 | 1.41 (0.35) | t(9) = 1.289 | Z(10) = 1.27 |
| Rural | 50% (33–83) | P = 0.213 | 1.60 (0.44) | P = 0.230 | P = 0.203 | |
| HH, blind side, large eccentricity | City | 31% (9–52) | Z(12) = 1.844 | 1.68 (0.48) | t(3) = 1.082 | Z(4) = 1.095 |
| Rural | 17% (8–40) | P = 0.065 | 2.55 (1.36) | P = 0.359 | P = 0.273 | |
n = 12 for the HH and NV groups.
n = 12 for NV group; response times could be calculated only for 11 (seeing-small), 11 (seeing-large), 10 (blind-small), and 4 (blind-large) drivers with HH.
Crash Details
One current RHH driver crashed three times: once when reaching for the horn button, once when hit from behind by a faster moving car (the RHH driver was in the wrong lane on a four-lane road; the simulator provides rear view and side mirrors), and once when an oncoming vehicle turned left across his travel path. This driver demonstrated very poor blind-side detection rates (R-Peds: 37% and 8%, for small and large eccentricities, respectively; I-Ped DR: 0%). One current LHH driver crashed when making a left turn and failed to see a fire engine coming from the left (blind side). This driver also demonstrated poor blind-side detection rates (R-Peds: 60% and 9% for small and large eccentricities, respectively; I-Peds at A: 25%). Two NV drivers also each collided once with a fire engine at an intersection. In one case the engine ran a stop sign and in the other it ran a red light; in both cases the engine had flashing lights but no sirens.
Footnotes
Disclosure: A.R. Bowers, None; A.J. Mandel, None; R.B. Goldstein, None; E. Peli, None
References
- 1.Zhang X, Kedar S, Lynn MJ, Newman NJ, Biousse V. Homonymous hemianopias: clinical-anatomic correlations in 904 cases. Neurology. 2006;66:906–910. doi: 10.1212/01.wnl.0000203913.12088.93. [DOI] [PubMed] [Google Scholar]
- 2.Peli E, Peli D. Driving with Confidence: A Practical Guide to Driving with Low Vision. Singapore: World Scientific Publishing; 2002. [Google Scholar]
- 3.Papageorgiou E, Hardiess G, Schaeffel F, et al. Assessment of vision-related quality of life in patients with homonymous visual field defects. Graefes Arch Clin Exp Ophthalmol. 2007;245:1749–1758. doi: 10.1007/s00417-007-0644-z. [DOI] [PubMed] [Google Scholar]
- 4.de Jong P, Warmink HH. Homonymous hemianopia and driving (letter) Eye. 2003;17:545. doi: 10.1038/sj.eye.6700395. [DOI] [PubMed] [Google Scholar]
- 5.Burgess SEP. Homonymous hemianopia and driving: reply. Eye. 2003;17:545–546. doi: 10.1038/sj.eye.6700395. [DOI] [PubMed] [Google Scholar]
- 6.Tant MLM, Brouwer WH, Cornelissen FW, Kooijman AC. Driving and visuospatial performance in people with hemianopia. Neuropsychol Rehabil. 2002;12:419–437. [Google Scholar]
- 7.DVLA Drivers Medical Group. For Medical Practitioners: at a Glance Guide to the Current Medical Standards of Fitness to Drive. Swansea, UK: Driver Vehicle Licensing Authority; 2008. [Google Scholar]
- 8.Wood JM, McGwin G, Jr, Elgin J, et al. On-road driving performance by persons with hemianopia and quadrantanopia. Invest Ophthalmol Vis Sci. 2009;50:577–585. doi: 10.1167/iovs.08-2506. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 9.Tant M. Do peripheral prism visual field expansion glasses assist drivers with hemianopia?. 9th International Conference on Low Vision, Vision 2008 (CD-ROM); New York: Informa Healthcare; 2008. Abstract 2.2. [Google Scholar]
- 10.Szlyk JP, Brigell M, Seiple W. Effects of age and hemianopic visual field loss on driving. Optom Vis Sci. 1993;70:1031–1037. doi: 10.1097/00006324-199312000-00007. [DOI] [PubMed] [Google Scholar]
- 11.Schulte T, Strasburger H, Muller-Oehring EM, Kasten E, Sabel BA. Automobile driving performance of brain-injured patients with visual field defects. Am J Phys Med Rehabil. 1999;78:136–142. doi: 10.1097/00002060-199903000-00010. [DOI] [PubMed] [Google Scholar]
- 12.Lovsund P, Hedin A, Tornros J. Effects on driving performance of visual field defects: a driving simulator study. Accid Anal Prev. 1991;23:331–342. doi: 10.1016/0001-4575(91)90011-s. [DOI] [PubMed] [Google Scholar]
- 13.Jenssen G, Stene T, Bjørkli C, Fosse P, Arnljot H. Effects of Visual Impairment on Driver Performance and Accident Risk. Trondheim, Norway: SINTEF; 2005. Report No.: STF50 A05248 82-14-03715-8. [Google Scholar]
- 14.Giorgi RG, Woods RL, Peli E. Clinical and laboratory evaluation of peripheral prism glasses for hemianopia. Optom Vis Sci. 2009;86:492–502. doi: 10.1097/OPX.0b013e31819f9e4d. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 15.Vanier M, Gauthier L, Lambert J, et al. Evaluation of left visuospatial neglect: norms and discrimination power of two tests. Neuropsychology. 1990;4:87–96. [Google Scholar]
- 16.Schenkenberg T, Bradford DC, Ajax ET. Line bisection and unilateral visual neglect in patients with neurologic impairment. Neurology. 1980;30:509–517. doi: 10.1212/wnl.30.5.509. [DOI] [PubMed] [Google Scholar]
- 17.Folstein MF, Folstein SE, McHugh PR. Minimental state: a practical method for grading the cognitive state of patients for the clinician. J Psychiatr Res. 1975;12:189–198. doi: 10.1016/0022-3956(75)90026-6. [DOI] [PubMed] [Google Scholar]
- 18.Peli E, Bowers AR, Mandel AJ, Higgins KE, Goldstein RB, Bobrow L. Design of driving simulator performance evaluations for driving with vision impairments and visual aids. Transp Res Rec. 2005;1937:128–135. [Google Scholar]
- 19.American Association of State Highway and Transportation Officials. A Policy on Geometric Design of Highways and Streets. Washington, DC: AASHTO; 2004. [Google Scholar]
- 20.Green M. “How long does it take to stop?”—methodological analysis of driver perception-brake times. Trans Hum Factors. 2000;2:195–216. [Google Scholar]
- 21.Mandel AJ, Bowers AR, Goldstein RB, Peli E. Analysis of driving behavior where it matters; Proceedings of the Driving Simulator Conference (DSC); North America. 2007; Iowa City, IA: University of Iowa; 2007. pp. 181–190. DVD-ROM. [Google Scholar]
- 22.Mandel AJ, Bowers AR, Goldstein RB, Peli E. Vehicle handling skills of drivers with hemianopia: a simulator assessment. Proceedings of the 9th International Conference on Low Vision, Vision 2008; New York: Informa Healthcare; 2008. CD-ROM. Paper 73.73. [Google Scholar]
- 23.Newcombe RG, Altman DG. Proportions and their differences. In: Altman DG, Machin D, Bryant TN, Gardner MJ, editors. Statistics with Confidence. 2. London: British Medical Journal Publishing Group; 2006. pp. 45–56. [Google Scholar]
- 24.Peli E. Field expansion for homonymous hemianopia by optically induced peripheral exotropia. Optom Vis Sci. 2000;77:453–464. doi: 10.1097/00006324-200009000-00006. [DOI] [PubMed] [Google Scholar]
- 25.Bowers AR, Keeney K, Peli E. Community-based trial of peripheral prism visual field expansion device for hemianopia. Arch Ophthalmol. 2008;126:657–664. doi: 10.1001/archopht.126.5.657. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 26.Bowers AR, Mandel AJ, Goldstein RB, Peli E. Increased head scanning by drivers with hemianopia results in better detection at intersections. 9th International Conference on Low Vision, Vision 2008; New York: Informa Healthcare; 2008. CD-ROM. Abstract 75.73. [Google Scholar]
- 27.Fatality Analysis Reporting System Encyclopedia. Fatal Crashes by Relation to Junction and Traffic Control Device USA 2007. [Accessed March 3, 2009]; Available at http://www-fars.nhtsa.dot.gov/crashes/crasheslocation-.aspx.
- 28.Bao S, Boyle LN. Age-related differences in visual scanning at median-divided highway intersections in rural areas. Accid Anal Prev. 2009;41:146–152. doi: 10.1016/j.aap.2008.10.007. [DOI] [PubMed] [Google Scholar]
- 29.Summala H, Pasanen E, Rasanen M, Sievanen J. Bicycle accidents and drivers’ visual search at left and right turns. Accid Anal Prev. 1996;28:147–153. doi: 10.1016/0001-4575(95)00041-0. [DOI] [PubMed] [Google Scholar]
- 30.Ball KK, Beard BL, Roenker DL, Miller RL, Griggs DS. Age and visual search: expanding the useful field of view. J Opt Soc Am A. 1988;5:2210–2219. doi: 10.1364/josaa.5.002210. [DOI] [PubMed] [Google Scholar]
- 31.Rogé J, Kielbasa L, Muzet A. Deformation of the useful visual field with state of vigilance, task priority, and central task complexity. Percept Mot Skills. 2002;95:118–130. doi: 10.2466/pms.2002.95.1.118. [DOI] [PubMed] [Google Scholar]
- 32.Rogé J, Pebayle T, Lambilliotte E, Spitzenstetter F, Giselbrecht D, Muzet A. Influence of age, speed and duration of monotonous driving task in traffic on the driver’s useful visual field. Vision Res. 2004;44:2737–2744. doi: 10.1016/j.visres.2004.05.026. [DOI] [PubMed] [Google Scholar]
- 33.Coeckelbergh TRM, Brouwer WH, Cornelissen FW, van Wolffelaar P, Kooijman AC. The effect of visual field defects on driving performance: a driving simulator study. Arch Ophthalmol. 2002;120:1509–1516. doi: 10.1001/archopht.120.11.1509. [DOI] [PubMed] [Google Scholar]
- 34.Netz J, Wolbers T. Hemianopsia and driving. Eur Medicophys. 2001;37:275–278. [Google Scholar]
- 35.Tant MLM, Brouwer WH, Cornelissen FW, Kooijman AC. Prediction and evaluation of driving and visuo-spatial performance in homonymous hemianopia after compensational training. Vis Impair Res. 2001;3:133–145. [Google Scholar]
- 36.Szlyk JP, Seiple W, Stelmack J, McMahon T. Use of prisms for navigation and driving in hemianopic patients. Ophthalmic Physiol Opt. 2005;25:128–135. doi: 10.1111/j.1475-1313.2004.00265.x. [DOI] [PubMed] [Google Scholar]