

Abstract
It is a key step to spatially align diffusion tensor images (DTI) to quantitatively compare neural images obtained from different subjects or the same subject at different timepoints. Different from traditional scalar or multi-channel image registration methods, tensor orientation should be considered in DTI registration. Recently, several DTI registration methods have been proposed in the literature, but deformation fields are purely dependent on the tensor features not the whole tensor information. Other methods, such as the piece-wise affine transformation and the diffeomorphic non-linear registration algorithms, use analytical gradients of the registration objective functions by simultaneously considering the reorientation and deformation of tensors during the registration. However, only relatively local tensor information such as voxel-wise tensor-similarity, is utilized. This paper proposes a new DTI image registration algorithm, called local fast marching (FM)-based simultaneous registration. The algorithm not only considers the orientation of tensors during registration but also utilizes the neighborhood tensor information of each voxel to drive the deformation, and such neighborhood tensor information is extracted from a local fast marching algorithm around the voxels of interest. These local fast marching-based tensor features efficiently reflect the diffusion patterns around each voxel within a spherical neighborhood and can capture relatively distinctive features of the anatomical structures. Using simulated and real DTI human brain data the experimental results show that the proposed algorithm is more accurate compared with the FA-based registration and is more efficient than its counterpart, the neighborhood tensor similarity-based registration.
Keywords: Diffusion tensor imaging, image registration, tensor reorientation, fast marching
1 Introduction
Diffusion tensor imaging (DTI) enables visualized and quantitative characterization of white matter (WM) tracts in 3-D human brain magnetic resonance imaging (MRI). It can be used to analyze white matter architectures, to distinguish normal and diseased brains, and to quantitatively perform follow-up studies (Alexander et al., 1999; Corouge et al., 2006). In the past fifteen years, DTI has become one of the most popular MRI techniques used in neuroimaging, and today it has found wider applications in clinical practices. Applications of quantitative DTI studies include multiple sclerosis, stroke, aging, dementia, schizophrenia, epilepsy, brain tumor and others.
DTI can measure the local water diffusion character in human brain and encapsulate it as a tensor. Using the 3-D tensor information of an entire brain, fiber tracts, and connectivity can be studied quantitatively. Recent clinical studies mostly focus on regional statistics of fractional anisotropy (FA), apparent diffusion coefficient (ADC), and mean diffusivity (MD) derived from such tensors. Neuroimaging researchers are focusing more on the orientation and patterns of the nerve fibers extracted from DTI (Corouge et al., 2006). In order to compare DTI from different subjects of a population and from the same subject at different timepoints, inter-subject and intra-subject registrations are required to spatially align the images. Registration is also essential to construct the DTI atlas of human brain of different subject groups (Assaf and Pasternak, 2008).
Many new tensor similarity measures and deformation mechanisms have been developed based on the tensor information contained in DTI for image registration. The classical approach is to globally align the DTI images, which is particularly useful for motion correction during multiple acquisitions (Pollari et al., 2006). Because of the relatively low resolution of DTI and less advanced alignment techniques in the initial works, global brain registration was also applied to quantitatively analyze various diseases, and parameters such as FA and ADC are used based on the voxel-based morphometry (VBM) framework or region of interest (ROI)-based methods. Typical tensor similarity measures used for global registration include multi-channel DTI feature similarity, tensor similarity, or the mutual information criterion.
In addition to global registration, deformable registration using elastic transformation to align images can yield more accurate correspondences among images. In deformable registration of DTI, many traditional scalar or multi-channel image registrations were applied to first register the feature maps, including the orientation-variant and orientation-invariant features, and then reorient the tensors according to the deformation fields. Reorientation can be performed in each iteration or as a final step. For example, in (Xu et al., 2003) the HAMMER algorithm (Shen and Davatzikos, 2002) has been employed, and a principal direction preserving reorientation algorithm is proposed to align the tensors. At the same time, various tensor features are extracted and different similarity metrics are proposed to drive the DTI registration. In (Yang et al., 2008) the geometry and orientation-invariant features are integrated into a hierarchical matching framework so as to capture richer features and to tolerate local tensor orientation. (Park et al., 2003) compared different features generated from DTI image with one multi-channel registration framework based on the demons algorithm. (Irfanoglu et al., 2008) proposed a method for deformable tensor-to-tensor registration by modeling the distances between the tensors with Geodesic-Loxodromes, and the multi-dimensional scaling algorithm is used to unfold the manifold with this metric. Ziyan et al. (Ziyan et al., 2007) used fiber bundles extracted from DTI for nonlinear registration with a poly-affine transformation model. In (Van Hecke et al., 2007), Van Hecke et al. developed a viscous fluid model-based deformable registration algorithm for DTI. Other registration algorithms using different tensor information can be found in (Chiang et al., 2008; Jones et al., 2002; Zhang et al., 2004). However, most of these algorithms are essentially traditional multi-channel image registration with a tensor feature in each channel, and full tensor information has not been embedded in the registration procedure.
The first attempt to handle the tensor reorientation during registration is to use rigid transformation-invariant features such as the tensor eigenvalues in multi-channel registration methodology (Guimond et al., 2002). Recent inspiring advances such as the piece-wise affine transformation (Zhang et al., 2007; Zhang et al., 2006; Zhang et al., 2004), non-rigid registration of 3-D tensor images (Ruiz-Alzola et al., 2002; Ruiz-Alzola et al., 2000), and the diffeomorphic non-linear registration algorithms (Vercauteren et al., 2009; Yeo et al., 2008a; Yeo et al., 2008b) adopted and integrated analytical gradients of the registration objective functions by considering the reorientation of tensor during the registration. In (Zhang et al., 2006; Zhang et al., 2004) an explicit analytic optimization of tensor reorientation during the optimization is proposed, and the algorithm seeks a piece-wise affine transformation that divides the image domain into uniform sub-regions and transforms each of them using an affine transformation. Yeo et al. (Yeo et al., 2008b) proposed a diffeomorphic non-linear registration algorithm, which incorporates an analytical gradient of the registration objective function to facilitate the optimization process. (Ruiz-Alzola et al., 2002; Ruiz-Alzola et al., 2000) extended the scalar image registration to tensor space by matching the image areas with high degree of local structure using gradient and correlation of the tensor data. In (Zhang et al., 2007) different registration approaches including the low- and high-dimensional normalization using the FA-based registration and the high-dimensional normalization using full tensor information (piece-wise affine tensor registration) were evaluated. Comparative studies suggested that high-dimensional approaches utilizing full tensor features instead of tensor-derived indices can further improve the alignment of WM tracts.
The above mentioned simultaneous deformable DTI image registration algorithms can be regarded as the counterparts of the traditional intensity-based image registration: the former is in the DTI space using voxel-wise tensor similarity by considering orientation, while the latter is in the intensity or scalar space, wherein no orientation is needed. In the scalar or multi-channel image registration domain, various distinctive image features have been proposed to better define image correspondences, and hence the registration is more robust and accurate compared to intensity similarity, e.g., (Shen and Davatzikos, 2002; Xue et al., 2004). Nevertheless, to our best knowledge, DTI registration embedding tensor reorientation is still in the image similarity-based registration domain due to the difficulty of extracting neighborhood tensor features of each point in DTI images.
To efficiently incorporate neighborhood tensor information, in this paper we propose a DTI image registration algorithm, referred to as local fast marching (FM)-based simultaneous registration. The algorithm not only considers the orientation of tensors in the registration procedure but also uses the full tensor information of the neighborhood of each voxel as distinctive attributes in the registration. Such tensor features can be extracted using a local fast marching algorithm executed around each voxel of interest. Compared with other features generated from DTI image, richer and more distinctive tensor features can be extracted using the local FM-based simultaneous registration, which can better define point correspondences between images. Thus, more accurate registration results can be obtained. In fact, compared with tensor-similarity-based multi-channel registration, the proposed algorithm uses the neighborhood tensor information of each voxel in a more efficient way, i.e., using local FM to extract diffusion time map as features. We derived that, unlike the similar idea of neighborhood tensor similarity-based registration wherein tensor reorientation needs to be performed in each iteration, local FM can be performed only once in each resolution and a simplified estimation of the FM time map can be achieved in our algorithm.
Three sets of experiments are designed and carried out to evaluate the proposed algorithm. First, since a simplified algorithm for calculating the local FM-based tensor features is used in our algorithm, we compared the estimation error between the actual and the estimated local time maps. The comparison showed that the average estimation error is 5.5%. The robustness of the time map estimation is also evaluated by applying Racian noise to the simulated DTI images. The other two experiments are carried out to assess the performance for registering DTI images. The first set of experiments uses simulated DTI images to evaluate the accuracy of registration by comparing with the FA-based free-form deformable registration and the neighborhood tensor-similarity-based registration, where the deformation ground truth is known. The reason to choose these two methods is that the FA-based registration is a typical example of the feature extraction, and the neighborhood tensor-similarity-based registration is a direct relaxation of the proposed algorithm — using neighborhood-based tensor similarities instead of local FM-based features. (Alexander et al., 1999) considered a number of tensor similarity measures for matching diffusion tensor images and concluded empirically that Euclidean difference measure of tensors yields the best results, and hence it is used to calculate the neighborhood tensor similarities in the evaluation. Both the deformation errors and the overlap of eigenvalue-eigenvector pairs (OVL) are compared for these methods. In the final experiment we apply the proposed algorithm to real diffusion tensor MRI images from normal adult subjects. Both visualization and quantitative results verify the advantages of the local FM-based simultaneous registration.
The rest of this paper is organized as follows. Section 2 introduces the local FM-based simultaneous registration algorithm in detail and Section 3 presents the experimental results. Section 4 is the discussion, and Section 5 is the conclusion of this study.
2 Methods
2.1 Problem Formulation
The formulation of our DTI registration algorithm is in line with that of the common image registration framework, with the objective of solving a deformation field f to align the template DTI image DT and the subject image DS. The energy function can be defined as,
| (1) |
In this equation Esim(DT, DS, f) stands for the similarity measure between the two images based on the current deformation f, and Econ(f) represents the smoothness constraint of the deformation field. λ is the weight of the constraint energy function. In our study, the deformation field f is modeled using the cubic B-Spline registration model (Rueckert et al., 1999), thus the smoothness of the deformation is guaranteed and the second term can be omitted. In addition, in order to make sure that the topology of the deformation fields is correct, after updating the deformation fields during the registration procedure we embedded the topology regularization algorithm to guarantee that the voxel-wise Jacobian determinants of the deformation field are positive (Karacali and Davatzikos, 2004). So the detailed energy function, E = Esim, can be re-written as,
| (2) |
where x is a voxel in the template image domain Ω. DT(x) denotes the tensor at voxel x in the template image, and DS (f(x) + x) represents the tensor at the corresponding location in the subject image. Q(f (x)) is the tensor rotation matrix calculated from the deformation field at voxel x (Alexander et al., 2001; Xu et al., 2003). It can be seen that in this formulation the tensor in the template image needs to be deformed (by using f) and reoriented (by using Q) in order to be compared with the corresponding tensor in the subject image. Function A[] represents the feature extraction operator of the diffusion tensors centered on a voxel, and ∥A[D1] − A[D2]∥2 calculates the distance between two sets of such feature vectors. If A[D] = D, namely, the feature of the diffusion tensor image at a voxel will be the tensor itself, ∥A[D1] − A[D2]∥2 = ∥D1 − D2∥2 becomes one of the tensor distances defined in (Alexander et al., 1999). In this special case the formulation in Eq.(2) is similar to the tensor similarity-based registration, wherein the overall similarity between two DTI images is based on a summation of the voxel-wise tensor differences.
It is worth noting that the voxel-wise tensor distance only reflects relatively local similarity to some extent, and the corresponding objective function is also easily to be trapped into local minima. On the contrary, by borrowing the idea in the scalar image registration domain, the features of all the tensors around each voxel x can be used in the registration, which reflect not only the tensor at the voxel but also its neighboring tensor patterns. In brief, we use the feature operator A[] in the equation to reflect such neighborhood tensor features so as to improve the accuracy of registration. We thus refer this method as neighborhood tensor-similarity-based registration.
In order to extract the neighborhood tensor information efficiently, A[] can be defined by the arrival time maps of the evolving fronts through performing a local tensor-based fast marching. Although the tensors within a neighborhood of a voxel is a high dimensional system, a simple fast marching starting from that voxel can extract the tensor patterns around it. Thus, the main idea of this paper is to not only use the neighborhood tensor information but also use local fast marching time maps as tensor features for simultaneous DTI registration. Compared to the idea of neighborhood tensor-similarity-based registration, in which spatial deformation and reorientation of the tensors are needed in order to calculate the similarity energy function in each iteration, local FM-based tensor features appear to be more efficient without lossin registration accuracy.
Both the local FM-based tensor features and the FA values are included as elements of the feature vectors. The local FM-based tensor features reflect the image structures within the neighborhood, and the FA values represent the tensor at each voxel. In our formulation the original tensor at each voxel was not used since according to our fast implementation algorithm presented below, tensors do not need to be reoriented in each iteration in order to calculate the local FM-based features, and FA values that reflect the anisotropic tensor features facilitate such a formulation.
Figure 1 illustrates why local FM-based tensor features are more distinctive, by comparing the distance maps calculated from the tensor distance and the local FM-based tensor features, respectively. In this example the local fast marching is performed within a sphere with radius 16mm around each point of the subject image. Only the high resolution images are used in this case to show the performance of feature similarity. In Figure 1(c), we can see that, if only the tensor distance is used, except for the corresponding voxel, there are still lots of voxels with similar tensor based feature. One the other hand we can see that from Figure 1(d), only localized region along the genu of corpus callosum is similar with the selected point in Figure 1(a). Thus the FM-based feature can reflect the intrinsic structure of the white matter tissue more than the tensor similarity measure, and it is more distinctive in determining point correspondences. In next section, we will introduce the local fast marching algorithm and describe the local FM-based simultaneous registration in detail.
Figure 1.

Comparison of the distance maps using tensor similarity and local FM-based tensor features. (a) the template image (FA) and a picked point; (b) the subject image (FA); (c) the distance map using voxel-based tensor similarity; and (d) the distance map using local FM-based tensor features.
2.2 Local Fast Marching for Diffusion Tensor Feature Extraction
In DTI images, the diffusivity of water molecules at a location is characterized by a tensor. Although FA, ADC, and other factors can be used as the diffusion features in the registration, they only reflect the local tensor features and do not reflect the diffusion patterns around the voxel of interest. In this work, we apply the local fast marching algorithm (Staempfli et al., 2006) to capture the diffusion patterns around a voxel. First the evolution of a front starts from the current voxel x and marches according to the neighboring tensors within a neighborhood of that voxel. Suppose at a specified timepoint the evolving front comes to a point y′, the marching speed from y′ to another neighboring candidate point y outside the evolving front can be defined as,
| (3) |
where νytensor(r) is the major evolution speed calculated from the tensor at the current point y′ toward point y along direction r : y′→y, and νyinertia(r) is the evolution speed of the previous marching step projected onto the current marching direction. In this work η is set to 0.9, so that 90% of the evolution speed is calculated from the current tensor.
| (4) |
where w is the coefficient to eliminate fast evolution within cerebrospinal fluid (CSF). When the FA value is small at a voxel, e.g., smaller than 0.3, it is more likely that the voxel is in CSF or GM. Thus, we set small w for small FA using equation w = 1/(1+exp(−α · (FA − β))), where α and β are constants to control the effects of FA. α (50) controls the slope of the Sigmoid function and β (0.3) is set as the FA threshold.
The second term in Eq. (3) is the inertia term used to smooth the evolution procedure,
| (5) |
where ry′ and νy′ are the evolution direction and the speed of the current front point y′, respectively, and “.” stands for scalar product of two vectors. According to the fast marching method the arrival time of the evolution front and the evolution speed are associated by the Eikonal equation (Sethian, 1999),
| (6) |
∇T represents the gradient of the arrival time of the evolving surface, and V denotes the speed of the marching front. Eq. (6) says that the gradient of arrival time surface is inversely proportional to the speed of the front. According to (Parker et al., 2002) the arrival time ty of the front at point y can be approximated as,
| (7) |
ty′, is the arrival time at point y′, and vy is the marching speed determined in Eq. (3). For each neighboring point of y′ outside the evolving front, we calculate its arriving time using Eq. (7), and the one with the least arrival time is then updated as the new front point. In this way the front evolves away from voxel x, and the arrival times within the neighborhood around x form a time map that characterizes its neighborhood tensor information.
Figure 2 demonstrates an example of the time map calculated around a given voxel. It can be observed that the time map patterns reflect the overall local tensor information around that voxel. The local time maps are used as the tensor features A[] in Eq. (2). The detailed implementation of using the time map in DTI registration will be described in the next section.
Figure 2.

The local time map calculated around a given voxel (green point). (a), (b), and (c) illustrate the evolution of the marching front (the boundary of the blue region) at different iterations. It can be seen that the front moves quickly along the fiber directions; (d) the time map generated from the local fast marching. The color map shows the values of the arrival time at each voxel starting from the green point. The green circle illustrates a neighborhood within which the time map features are selected as the tensor features;
2.3 Fast Implementation of the Local FM-Based Simultaneous Registration Algorithm
After fast marching we can obtain the time map around each voxel of interest over the entire brain. Figure 2 exhibits that the diffusion speed or arrival time along different directions is very different, which is determined by the DTI image. The front propagates faster along the direction of fiber tracts and slower along other directions. Therefore, the time map calculated from the tensor-based fast marching reflects the diffusion patterns around a voxel. Reconsider Eq. (2), the time map obtained from Section 2.2 can be used to calculate the tensor features, thus Eq. (2) is re-written as,
| (8) |
where ts(x,y) stands for the arrival time from voxel x to voxel y in the subject image S · tQ(f)DTQT(f),f(x,y) is the arrival time map from voxel x to voxel y in the deformed template image after considering both tensor reorientation Q(f) and deformation field f. N(x) represents a local neighborhood of voxel x wherein the local fast marching features are extracted.
The second term in Eq. (8) defines the similarity between the FA values of the template image and the subject image, and μ is the weighting parameter. The reason to use FA values in addition to FM-based tensor features is that the FM-based features are the local fast marching time maps and reflect relative information from one tensor to another (similar to local gradient maps), and FA values reflect the local tensor feature at each voxel (similar to the voxel intensities). FA can also be used to distinguish WM from other tissue, such as GM and CSF, so involving FA value in the energy term can assure the registration accuracy in tissue boundary region. We know that FA values of DTI range from 0 to 1, however, the FM arrival times can vary across different scanners, protocols, and reconstruction algorithms. In order to determine a proper μ, we tested different cases by varying μ. It turns out that we can calculate the values of the first term from a pair of images with known deformation, and then μ is set so that the second energy term is about a quarter of the maximal value of the first term. Experiments on simulated images show that this configuration generates the most accurate registration as compared to the known ground truth.
Given the template and the subject DTI images, we can then calculate the deformation field f by minimizing Eq. (8). However, in the optimization once the deformation field f is changed, the time map around each voxel has to be recalculated based on the deformed and reoriented template image. Literally we cannot simply deform the time maps since the arrival times also change after deformation and reorientation. The same situation also applies to the neighborhood tensor-similarity-based registration. Such deformation and reorientation in each iteration are extremely time-consuming, and a fast implementation algorithm should be investigated in order to be able to accomplish the goal. To overcome the difficulty, we use an approximation of the time map in the template image to simply the calculation in this work.
To speed up the calculation process, the time map features are calculated using fast marching at each resolution (three resolutions are used in our algorithm), and in each iteration the time map is corrected based on the current deformation using an estimation method. Specifically, we calculate the time map around each voxel x, tT(x,y),y ∈ N(x) and then use it to estimate tQDTQT, f (·,·) in Eq. (8). As it can be seen from Figure 3, for a smooth deformation field the local angular changes along the fast marching tracks (the pink track in the figure) are relatively small. Thus, it can be assumed that the reorientation of the fast marching track and that of the tensor at a given voxel are similar, or in another word, the angular difference of the two orientations is small. Therefore, the change of the projection of the tensor along the marching direction, i.e., rT Dy′r in Eq. (4), and the angular differences between vectors ry′ and r in Eq. (5) are omitted after smoothly deforming the template image. Because the relatively large change will be the distance d in Eq. (7), the time map can be estimated by the distance changes along the marching tracks as,
| (9) |
where | · |x→y represents the distance along the marching track from x to y.
Figure 3.

The local angular changes along the fast marching tracks (pink line) are relatively small for smooth deformation field. For example the fast marching starting from the bottom-left red tensor to the top blue tensor will follow the same track as shown in pink dash-dotted lines before and after deformation. In our simplification, we assume that the angular changes along these tracks are small and thus the time map change can be approximately adjusted by the distance changes due to deformation.
Finally, the simplified energy function can be defined as,
| (10) |
Using the simplified version, we only need to calculate the local fast marching feature once for both the template and the subject images at each resolution. The time map features in the template image are then “deformed” and adjusted in order to calculate the differences between the template image and the subject image.
The FM-based simultaneous registration algorithm can be summarized as follows:
Step 1. Select the number of resolutions R = 3 and down-sample the input DTI images for multi-resolution registration; set the current resolution r = R.
Step 2. In resolution r, for each voxel whose FA value is greater than a threshold (0.3), calculate its local time map (the size of neighborhood is set to four voxels) using the method described in Section 2.2. If r<R, fast marching is performed on the subject image by considering the current deformation and reorientation. The reason to set FA threshold is that from our previous study (Li et al., 2010), when FA is smaller than 0.3, most voxels belong to GM and CSF, and we can eliminate those voxels for improving the calculation speed.
Step 3. In cubic B-Spline each control point c is assigned a deformation value v(c), and the whole deformation field can be generated using B-Spline interpolation. The major task is thus to estimate the gradient of the objective function with respect to c, i.e., , and to update v(c) using this gradient . Since each control point only affects a small portion of the deformation field, once the deformation value of a control point is updated, the corresponding deformation field affected by this control point will be updated. All the control points are iterated in this step to update the deformation.
Step 4. Repeat Step 3 until convergence. After registration in resolution r, if r = 1 then go to Step 5, otherwise we up-sample the cubic B-Spline model to a higher resolution and calculate its corresponding deformation field. Finally, we set r = r −1, and go to Step 2 for processing in the next resolution;
Step 5. Calculate the final deformation field using the resultant cubic B-Spline model and reorient the subject image onto the template space if necessary (Alexander et al., 2001; Xu et al., 2003).
3 Results
Three sets of experiments are carried out to evaluate the proposed algorithm. First, we compared the estimation error between the actual and the estimated local time maps due to the simplification of the algorithm. The robustness of the time map estimation is also tested by inserting Racian noise to the simulated DTI images. Then simulated DTI images are used to evaluate the accuracy of registration by comparing with the FA-based free-form deformable registration and the neighborhood tensor-similarity-based registration using simulated images where the deformation ground truth is known. Finally, we apply the proposed algorithm to real diffusion tensor MRI images from normal subjects.
3.1 Evaluation of the Fast Implementation of the Local FM-Based Features
One important simplification of the proposed algorithm is that in order to avoid recalculating the local FM-based features after warping, i.e., tQ(f)DTQT(f),f(x,y) we used the estimation in Eq. (9) to update its value (see Section 2.3). The major assumption is that the reorientation of the fast marching track and that of the tensor at a given voxel are similar or the angular difference of the two orientations is small. This simplification can speed up the calculation greatly since no new local fast marching will be performed after the deformation field is updated at each resolution. In order to evaluate the accuracy of this estimation, in this experiment we calculated the differences between the actual local FM-based features and the estimated local FM-based features, and compared the estimation errors.
Given a voxel x in the template image space, a current deformation field f and a neighborhood N(x), the actual local FM-based tensor feature is calculated by first deforming and reorienting all the template tensors of the template image according to a given deformation f and then performing a local fast marching on this deformed template image for each voxel of interest. Denoting the actual local FM-based time map as tQ(f)DTQT(f),f(x,y),and the estimated local FM-based time map as t̂Q(f)DTQT(f),f(x,y) their error can be calculated as,
| (11) |
where ∣ N(x) ∣ refers to the number of voxels within the neighborhood N(x). This error gives a percentage of the estimation error of the time map around each voxel. Figure 4 shows an example of the experiments. Figure 4(a) gives the template FA image, and in the big picture the local fast marching is performed starting from the voxel of interest (the center of the overlapping region). What’s more, this local FM result is enlarged in the small picture beside the FA image. Figure 4 (b) and (c) illustrate the actual and estimated local FM-based time maps overlapping on the deformed FA image, respectively. It can be seen that these two color maps are very similar ((b) and (c)). Quantitatively, the error of this example is 6.1% given the mean deformation over the entire image as 4.0 mm and maximal deformation as 15mm.
Figure 4.

An example of the actual and estimated local FM-based time maps. (a) The template image and the local FM-based time map (enlarged on the right) around the voxel of interest at the center of the circle; (b) the actual local FM-based time maps on the corresponding location overlapping on the deformed template FA image; (c) the estimated local FM-based time map. It can be seen that the shape of the actual (b) and estimated (c) local FM-based time maps are very similar.
To quantitatively calculate the errors, we calculated all the errors of all the voxels with FA value larger than 0.3 in the template image using ten different deformations randomly generated by the statistical deformation simulation algorithm (please refer to the next section for details of these simulated deformations). For our experiments, the mean and standard deviation of the errors are 5.5% and 2%. Therefore, for realistic deformation fields, the proposed simplification method obtains relatively accurate estimation of the local FM-based tensor features. Notice that this time map estimation error is mainly dependent on the amplitude of deformation field, and it is not propagating from one iteration to another during the registration. Therefore we can directly calculate the errors defined in Eq. (11) using simulated realistic deformation fields. Generally the intermediate deformation fields during the registration procedure are smaller than the final results, so the time map estimation errors calculated from the simulated deformation fields can be considered as the largest possible values.
We also assessed the robustness of the time map calculation by inserting Racian noises onto the simulated DT images. At different signal to noise ratio levels the time map errors in Eq. (11) are calculated and the results are shown in Figure 5. It can be seen that the errors increase linearly with respect to the reciprocal of the signal to noise ratio. In summary the FM-based time map can act as a relatively stable feature for DT images. In the following experiments, the proposed registration algorithm is compared with the FA-based and neighborhood tensor-similarity-based registration methods in simulated and real dataset separately to validate the efficiency of the proposed new diffusion feature.
Figure 5.

Average and STD of time map estimation errors for DT images with different Racian noises.
3.2 Comparative Results Using Simulated Datasets
The purpose of this experiment is to evaluate the registration accuracy of the proposed algorithm using simulated DTI data. Ten DTI images have been simulated based on the following strategy. First the statistical model-based deformation simulation algorithm (Xue et al., 2006) is used to simulate the DTI images. More than 100 T1-weighted MR images have been registered onto a template image space, in which both T1-weighted and diffusion tensor images are available, using the high-dimensional registration algorithm (Shen and Davatzikos, 2002). For all the images under our study, the voxel size of the T1-weighted images is .9375mm×.9375mm×1.5mm and that of the DTI images is 2mm×2mm×2.7mm. Based on the resultant deformation fields, a statistical model was trained and then used to simulate ten deformations. Finally, we used (Alexander et al., 2001) to warp the DTI image of the template onto ten different subject spaces based on the simulated deformation fields. Thus the tensors of the template DTI image have been undergone both warping and reorientation operations in order to generate the warped DTI images. Since the deformation fields between the template image and the simulated images are known, we used them as our testing images to evaluate the performance of the proposed algorithm. Similarly, the fractional anisotropy images are also calculated from these DTI images and used as one feature of the proposed algorithm. As a comparison, the traditional ways to register DTI image, i.e., register the FA images using high-dimensional free-form deformable registration, and the neighborhood tensor-similarity-based registration have also been tested. Figure 6 shows the color-coded principal directions of the template DTI image (a) and those of four sample simulated images (b-e). It can be seen that the simulated images are different in terms of shape variability and valid anatomical structures (notice the various shapes of the ventricles). For comparison purposes, the registration results using the FM-based simultaneous registration are also shown in Figure 6 (f-i).
Figure 6.
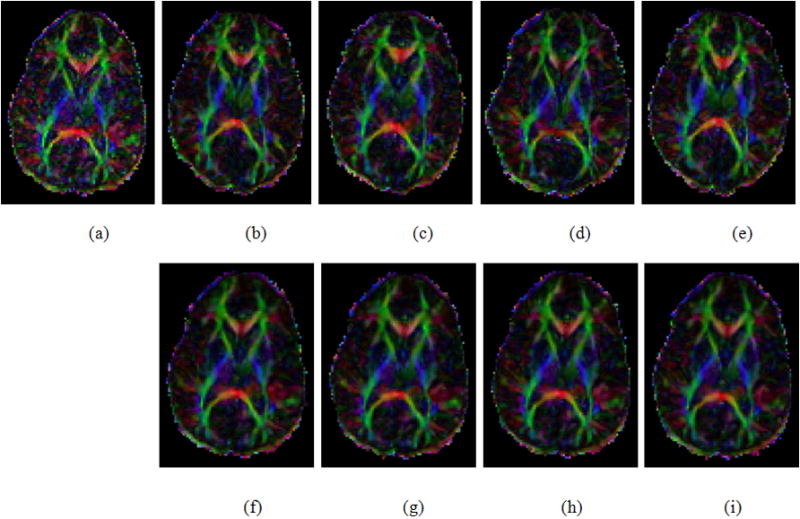
The template image and four examples of the simulated images. (a) The template; (b)-(e) the simulated images; (f)-(i) the registered images. Global transformations between template and simulated images have been canceled from the training datasets so that only deformable vector fields are simulated using method (Xue et al., 2006). It can be seen that the simulated images have relatively large deformations (max >1.3mm), and the corresponding registered images are similar to the template image (a).
Comparison with the FA-based free-form registration
After registering the template image with the simulated images, we calculated the distributions of the deformation errors between the registration results and the ground truth. Suppose the ground truth is f* and the resultant deformation is f, the difference map Δf is calculated as the voxel-wise Euclidian distance between f and f*. Figure 7 shows the average histograms for ten images using the proposed local FM-based simultaneous registration algorithm and the FA-based free-form deformation algorithm, respectively. The plot shows that the proposed algorithm yields relatively accurate deformation. As the FA is also used in the proposed algorithm as one image feature for registration, the comparative studies indicate that by using the neighborhood tensor features the registration can be more robust and accurate. The experiment also shows that the simplification of the energy function works well for DTI image registration.
Figure 7.
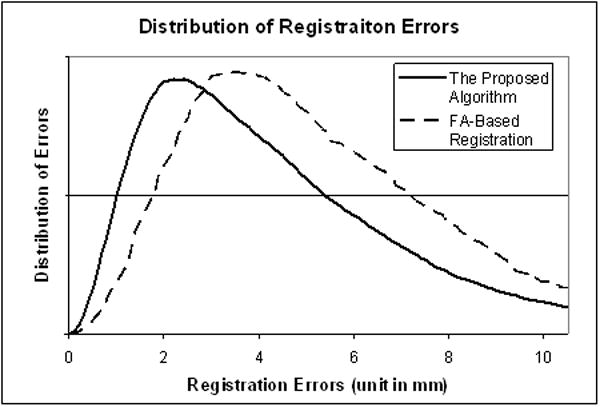
The distributions of the registration errors of ten simulated images using the FA-based registration and the proposed algorithm.
Comparison with the neighborhood tensor-similarity-based registration
The key idea of the proposed local FM-based simultaneous registration algorithm is that not only the deformation but also the orientation of the tensors within a neighborhood of the current voxel are simultaneously used in the registration procedure. Moreover, in order to facilitate the local tensor features, the local fast marching from each voxel is performed, and one fast implementation algorithm is used to avoid the recalculation of local fast marching based on the deformed and oriented images. An alternative method to utilize the local neighborhood tensor feature is to apply the tensor similarity within the same neighborhood and, at the same time, combine the deformation and orientation of tensors. The major difference between this neighborhood tensor-similarity-based implementation and our local FM-based registration method lies that the former uses the entire tensors and latter uses the fast marching algorithm to extract the tensor features. Therefore, it will be interesting to compare the performance of these two methods and validate the use of local FM-based tensor features.
Figure 8 illustrates the local neighborhood in the template image space and the deformed tensors on the subject image space. When considering the deformation of the tensor and calculating the neighborhood tensor-similarity around a voxel shown in Figure 8 (a), the tensor similarity can be calculated on the subject image space based on the same spherical neighborhood. As shown in Figure 8 (b) the similarity measure between the deformed template image and the subject image is defined as the tensor-similarity within the neighborhood defined by the red circle between the deformed template tensors and the tensors on the subject image, where tri-linear tensor interpolation is applied.
Figure 8.

Illustration of the local neighborhood and the deformed tensors. (a) The tensors in the template image. Red tensor represents the current tensor and blue tensors means the tensors within the neighborhood (red circle); (b) the deformed template tensor on black deformed grids and the grids of the subject image (green). The neighborhood similarity measure between the deformed template image and the subject image is defined as the sum of the tensor-similarity between the deformed template tensors and the tensors on the subject image (tri-linear tensor interpolation is applied in the calculation).
Similar to the previous error analysis, after registering the template image with the simulated images we calculated the distributions of the deformation errors between the registration results and the ground truth. Three resolutions are used, and at each resolution, the radius of the neighborhood is set as the same as our proposed algorithm. Figure 9 shows the average histograms for the same ten simulated images using the proposed local FM-based simultaneous registration algorithm and the neighborhood tensor-similarity-based method. The distributions of the registration errors of these two methods are very similar, indicating that they have similar performance in terms of accuracy. Regarding the calculation speed, the FA-based free-form registration algorithm takes about 2 minutes, the proposed local FM-based simultaneous registration algorithm can finish the registration of a pair of images within 5~7 minutes, and the neighborhood tensor-similarity-based algorithm has the job done within one hour using an HP xw4400 workstation with an Intel Core2 CPU at 2.66GHz and 4GB memory. The major extra work is tensor deformation and interpolation in each iteration.
Figure 9.

The distribution of the registration errors of the ten simulated images using the proposed algorithm and the neighborhood tensor-similarity-based image registration. It can be seen that similar registration errors are observed for the ten simulated DTI images. Noticeably our algorithm uses the effective local FM-based time maps to capture the tensor information of the neighborhood anatomical information and performs much faster.
Comparison of OVL
The overlap of eigenvalue-eigenvector pairs (OVL) (Basser and Pajevic, 2000) are calculated for each voxel between the template image and the registered/reoriented subject image. OVL is defined as:
| (12) |
where, (λi, εi) is eigenvalue-eigenvector pair of a tensor in the template image space, and the subject image is deformed and reoriented using the resultant deformation field. The minimal value 0 indicates no overlap, and maximal value 1 indicates complete overlap of the tensors at that voxel. Table 1 gives the average and STD values for the ten simulated images for different registration algorithms. We also computed the statistical differences between the proposed algorithm and the FA-based registration, as well as the neighborhood tensor-similarity-based registration algorithm. It can be seen that the proposed algorithm has significant improvement over the FA-based free-form registration and is similar with the neighborhood tensor-similarity-based algorithm.
Table 1.
Comparison of average and STD of OVL for simulated images
| Method | FA-based registration | Neighborhood tensor-similarity-based registration | FM-based simultaneous registration |
|---|---|---|---|
| OVL | 0.827 (0.01) | 0.865 (0.01) | 0.87 (0.01) |
| p-value | <10−5 | 0.37 | N.A. |
It is disappointing that the FM-based registration acts similarly with the neighborhood tensor-similarity-based method. The reason could be that they both use the main idea of this paper, i.e., using tensor neighborhood information for simultaneous diffusion tensor image registration. The results also support the idea that neighborhood information act as an important role in DTI registration. The neighborhood tensor-similarity-based registration is thus a straightforward implementation, and the FM-based registration algorithm is a further simplification and improvement of it.
3.3 Experiments on Real DTI Images
The final experiment aims to illustrate the application of the proposed algorithm on real DTI images. In order to be able to visually evaluate the performance of the algorithm, the proposed algorithm is used to automatically register a template image with fourteen normal adult DTI images. The DTI data was acquired on a Philips 1.5T Intera using 15-direction diffusion encoding, with b0=0 and b1=860 s / mm2.
Figure 10 shows some examples of the registration results using the proposed algorithm. The first row gives the subject images and the second row shows the registered images. The template image is the same as in Figure 6. It can be seen that after registration the warped and reoriented images are very similar to the template image. Similarly, the overlaps of eigenvalue-eigenvector pairs after different registration are calculated for each registration algorithm. Table 2 gives the average and STD values of OVLs, as well as the statistical analysis results for the fourteen images. It can be seen that although the absolute values of OVLs are smaller than those of the simulated images, the proposed algorithm also shows significant improvement over the FA-based free-form registration and acts similarly to the neighborhood tensor-similarity-based algorithm.
Figure 10.

Examples of the registration results for real diffusion tensor images using the proposed FM-based simultaneous registration algorithm.
Table 2.
Comparison of average and STD of OVL for real images
| Method | FA-based registration | Neighborhood tensor-similarity-based registration | FM-based simultaneous registration |
|---|---|---|---|
| OVL | 0.56 (0.01) | 0.59 (0.01) | 0.60 (0.01) |
| p-value | <10−5 | 0.08 | N.A. |
Finally, we can also visually compare the fiber bundles after deformable registration. Figure 11 demonstrates two examples of fiber bundles before and after deformable registration. First, two WM fiber bundles, left uncinate bundle and right uncinate bundle, are manually extracted from the template and two randomly selected subjects using the DTI Studio software according to the guidelines in (Wakana et al., 2007). Then the subject bundles are transferred onto the template space using the deformation field generated with the proposed method. Figure 11(a) and Figure 11(c) show the right and left uncinate bundles from the subjects (red and green) as well as the bundle (pink) extracted from the template image, respectively. These subject bundles are rigidly transformed and overlaid on the template image. Figure 11(b) and Figure 11(d) display the corresponding fiber bundles after deformable registration by the proposed method. It can be clearly seen that after registration the fiber bundles from different subjects appear very similar in shape and also overlap well in the template space.
Figure 11.

Visualization of WM bundles before and after deformable registration using the proposed FM-based simultaneous registration algorithm. (a) and (c) Right and left uncinate bundles from subjects (red and green) and the template (pink) overlaid on the template image; (b) and (d) the corresponding fiber bundles after deformable registration.
4 Discussion
Compared to traditional MRI the diffusion tensor components are much more complex, and not only spatial normalization but also the orientation of tensors should be considered in the registration procedure. Traditional registration methods that determine the deformation field based on fixed tensor features extracted prior to registration do not embed the tensor orientation, and hence the registration results might be biased dependent on the features used. Although tensor-similarity-based registration can simultaneously consider the reorientation, it essentially considers the tensor of each voxel, and neighborhood information is not explicitly used.
In this article, we propose to use such neighborhood tensor information in the simultaneous registration framework. A straightforward idea is to extend the tensor-similarity measure into the neighborhood-based tensor similarity, thus the reorientation is necessary after each iteration. This method is referred to as the neighborhood tensor-similarity-based registration. To simplify the procedure and, at the same time, still capture the neighborhood tensor information, we borrow the idea of the local tensor-based fast marching which captures the tensor information and translate the tensors within a neighborhood of a voxel into a scalar time map. Of course such a time map also needs to be updated during the registration to reflect the spatial deformation and orientation changes. Fortunately by assuming the orientation changes along the fast marching tracks are small for smooth deformation fields, such time map features can be estimated based on the displacements of the deformation field. As a result, the registration procedure can be easily simplified.
An important issue is how robust such a simplification is. From the evaluation results using simulated images we can see that the error of the estimated time maps for simulated deformations is about 5.5%, and the registration results using FM-based registration are similar to its original complex version, the neighborhood tensor-similarity-based method. Although it is disappointing that they do not have significant differences, the proposed algorithm improves the efficiency while maintaining similar performance. Also notice that the simplification of time map estimation needs further mathematical proof, and we expect that with more efforts on the mathematical modeling of the reorientation and simplification, we can further simplify the problem for simultaneous registration and improve the accuracy. Thus one of the future works will be focused on better understanding the neighborhood tensor features by simultaneously considering the spatial deformation and reorientation.
Although for validation purposes, the final deformed subject images onto the template space are generated by spatially deformation and reorientation, in many applications such as tract-based analysis, we do not have to transfer the subject images. Once the deformation fields from a template image to a number of subject images are determined, the quantitative comparison and tractography comparison can be accomplished using the corresponding fiber bundle features from subject images. Therefore, as long as the deformable registration provides accurate vector field to define the correspondences among images, fiber tracts and other diffusion characteristics can be first calculated in the original subject image spaces and then spatially aligned for quantitative intra- and inter-subject analysis.
5 Conclusion
A local fast marching-based simultaneous DTI registration algorithm is proposed in this paper. The algorithm not only considers the orientation of tensors but also uses the neighborhood tensor information of each voxel during the registration procedure. The tensor features are extracted by applying a local fast marching algorithm around voxels of interest (for voxels with FA larger than a prescribed threshold). Compared to the FA-based free-form registration using the randomly simulated realistic DTI images, more accurate registration results can be obtained. The neighborhood tensor-similarity-based registration also follows the similar idea of using tensor neighborhood information, and the evaluation results showed similar results, but the FM-based method is more efficient. In addition, visual evaluation of the normalized fiber tracts by the local FM-based simultaneous registration proves this approach is promising. Our future work will be focused on evaluating the proposed algorithm in real DTI brain image analysis applications such as brain connectivity analysis in Autistic or Schizophrenia patients.
Acknowledgments
This research is partially funded by NIH G08LM008937.
Footnotes
Publisher's Disclaimer: This is a PDF file of an unedited manuscript that has been accepted for publication. As a service to our customers we are providing this early version of the manuscript. The manuscript will undergo copyediting, typesetting, and review of the resulting proof before it is published in its final citable form. Please note that during the production process errors may be discovered which could affect the content, and all legal disclaimers that apply to the journal pertain.
References
- Alexander DC, Gee JC, Bajcsy R. Similarity measures for matching diffusion tensor images. British Machine Vision Conference. 1999:93–102. [Google Scholar]
- Alexander DC, Pierpaoli C, Basser PJ, Gee JC. Spatial transformations of diffusion tensor magnetic resonance images. IEEE Trans Med Imaging. 2001;20:1131–1139. doi: 10.1109/42.963816. [DOI] [PubMed] [Google Scholar]
- Assaf Y, Pasternak O. Diffusion tensor imaging (DTI)-based white matter mapping in brain research: a review. J Mol Neurosci. 2008;34:51–61. doi: 10.1007/s12031-007-0029-0. [DOI] [PubMed] [Google Scholar]
- Basser PJ, Pajevic S. Statistical artifacts in diffusion tensor MRI (DT-MRI) caused by background noise. Magn Reson Med. 2000;44:41–50. doi: 10.1002/1522-2594(200007)44:1<41::aid-mrm8>3.0.co;2-o. [DOI] [PubMed] [Google Scholar]
- Chiang MC, Leow AD, Klunder AD, Dutton RA, Barysheva M, Rose SE, McMahon KL, de Zubicaray GI, Toga AW, Thompson PM. Fluid registration of diffusion tensor images using information theory. IEEE Trans Med Imaging. 2008;27:442–456. doi: 10.1109/TMI.2007.907326. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Corouge I, Fletcher PT, Joshi S, Gouttard S, Gerig G. Fiber tract-oriented statistics for quantitative diffusion tensor MRI analysis. Med Image Anal. 2006;10:786–798. doi: 10.1016/j.media.2006.07.003. [DOI] [PubMed] [Google Scholar]
- Guimond A, Guttmann CRG, Warfield SK, Westin CF. Deformable registration of DT-MRI data based on transformation invariant tensor characteristics. Biomedical Imaging, 2002 Proceedings 2002 IEEE International Symposium on. 2002:761–764. [Google Scholar]
- Irfanoglu MO, Machiraju R, Sammet S, Pierpaoli C, Knopp MV. Automatic deformable diffusion tensor registration for fiber population analysis. Med Image Comput Comput Assist Interv Int Conf Med Image Comput Comput Assist Interv. 2008;11:1014–1022. doi: 10.1007/978-3-540-85990-1_122. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Jones DK, Griffin LD, Alexander DC, Catani M, Horsfield MA, Howard R, Williams SC. Spatial normalization and averaging of diffusion tensor MRI data sets. Neuroimage. 2002;17:592–617. [PubMed] [Google Scholar]
- Karacali B, Davatzikos C. Estimating topology preserving and smooth displacement fields. IEEE Trans Med Imaging. 2004;23:868–880. doi: 10.1109/TMI.2004.827963. [DOI] [PubMed] [Google Scholar]
- Li H, Xue Z, Guo L, Liu T, Hunter J, Wong STC. A hybrid approach to automatic clustering of white matter fibers. NeuroImage. 2010;49:1249–1258. doi: 10.1016/j.neuroimage.2009.08.017. [DOI] [PubMed] [Google Scholar]
- Park HJ, Kubicki M, Shenton ME, Guimond A, McCarley RW, Maier SE, Kikinis R, Jolesz FA, Westin CF. Spatial normalization of diffusion tensor MRI using multiple channels. Neuroimage. 2003;20:1995–2009. doi: 10.1016/j.neuroimage.2003.08.008. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Parker GJM, Wheeler-Kingshott CAM, Barker GJ. Estimating distributed anatomical connectivity using fast marching methods and diffusion tensor Imaging. IEEE Trans Med Imaging. 2002;21:505–512. doi: 10.1109/TMI.2002.1009386. [DOI] [PubMed] [Google Scholar]
- Pollari M, Neuvonen T, Lotjonen J. Affine registration of diffusion tensor MR images. Med Image Comput Comput Assist Interv Int Conf Med Image Comput Comput Assist Interv. 2006;9:629–636. doi: 10.1007/11866763_77. [DOI] [PubMed] [Google Scholar]
- Rueckert D, Sonoda LI, Hayes C, Hill DL, Leach MO, Hawkes DJ. Nonrigid registration using free-form deformations: application to breast MR images. IEEE Trans Med Imaging. 1999;18:712–721. doi: 10.1109/42.796284. [DOI] [PubMed] [Google Scholar]
- Ruiz-Alzola J, Westin CF, Warfield SK, Alberola C, Maier S, Kikinis R. Nonrigid registration of 3D tensor medical data. Med Image Anal. 2002;6:143–161. doi: 10.1016/s1361-8415(02)00055-5. [DOI] [PubMed] [Google Scholar]
- Ruiz-Alzola J, Westin CF, Warfield SK, Nabavi A, Kikinis R. Nonrigid Registration of 3D Scalar, Vector and Tensor Medical Data. Med Image Comput Comput Assist Interv Int Conf Med Image Comput Comput Assist Interv. 2000;4:541–550. [Google Scholar]
- Sethian JA. Level Set Methods and Fast Marching Methods. Cambridge University Press; Cambridge: 1999. [Google Scholar]
- Shen D, Davatzikos C. HAMMER: hierarchical attribute matching mechanism for elastic registration. IEEE Trans Med Imaging. 2002;21:1421–1439. doi: 10.1109/TMI.2002.803111. [DOI] [PubMed] [Google Scholar]
- Staempfli P, Jaermann T, Crelier GR, Kollias S, Valavanis A, Boesiger P. Resolving fiber crossing using advanced fast marching tractography based on diffusion tensor imaging. Neuroimage. 2006;30:110–120. doi: 10.1016/j.neuroimage.2005.09.027. [DOI] [PubMed] [Google Scholar]
- Van Hecke W, Leemans A, D’Agostino E, De Backer S, Vandervliet E, Parizel PM, Sijbers J. Nonrigid coregistration of diffusion tensor images using a viscous fluid model and mutual information. IEEE Trans Med Imaging. 2007;26:1598–1612. doi: 10.1109/TMI.2007.906786. [DOI] [PubMed] [Google Scholar]
- Vercauteren T, Fillard P, Pennec X, Golland P, Ayache N, Clatz O. DT-REFinD: Diffusion Tensor Registration With Exact Finite-Strain Differential. IEEE Trans Med Imaging. 2009 doi: 10.1109/TMI.2009.2025654. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Wakana S, Caprihan A, Panzenboeck MM, Fallon JH, Perry M, Gollub RL, Hua K, Zhang J, Jiang H, Dubey P, Blitz A, van Zijl P, Mori S. Reproducibility of quantitative tractography methods applied to cerebral white matter. NeuroImage. 2007;36:630–644. doi: 10.1016/j.neuroimage.2007.02.049. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Xu D, Mori S, Shen D, van Zijl PC, Davatzikos C. Spatial normalization of diffusion tensor fields. Magn Reson Med. 2003;50:175–182. doi: 10.1002/mrm.10489. [DOI] [PubMed] [Google Scholar]
- Xue Z, Shen D, Davatzikos C. Determining correspondence in 3-D MR brain images using attribute vectors as morphological signatures of voxels. IEEE Trans Med Imaging. 2004;23:1276–1291. doi: 10.1109/TMI.2004.834616. [DOI] [PubMed] [Google Scholar]
- Xue Z, Shen D, Davatzikos C. Statistical representation of high-dimensional deformation fields with application to statistically constrained 3D warping. Med Image Anal. 2006;10:740–751. doi: 10.1016/j.media.2006.06.007. [DOI] [PubMed] [Google Scholar]
- Yang J, Shen D, Davatzikos C, Verma R. Diffusion tensor image registration using tensor geometry and orientation features. Med Image Comput Comput Assist Interv Int Conf Med Image Comput Comput Assist Interv. 2008;11:905–913. doi: 10.1007/978-3-540-85990-1_109. [DOI] [PubMed] [Google Scholar]
- Yeo BT, Sabuncu M, Vercauteren T, Ayache N, Fischl B, Golland P. Spherical demons: fast surface registration. Med Image Comput Comput Assist Interv Int Conf Med Image Comput Comput Assist Interv. 2008a;11:745–753. doi: 10.1007/978-3-540-85988-8_89. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Yeo BT, Vercauteren T, Fillard P, Pennec X, Golland P, Ayache N, Clatz O. DTI Registration with Finite-Strain Differential. ISBI. 2008b:700–703. doi: 10.1109/TMI.2009.2025654. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Zhang H, Avants BB, Yushkevich PA, Woo JH, Wang S, McCluskey LF, Elman LB, Melhem ER, Gee JC. High-dimensional spatial normalization of diffusion tensor images improves the detection of white matter differences: an example study using amyotrophic lateral sclerosis. IEEE Trans Med Imaging. 2007;26:1585–1597. doi: 10.1109/TMI.2007.906784. [DOI] [PubMed] [Google Scholar]
- Zhang H, Yushkevich PA, Alexander DC, Gee JC. Deformable registration of diffusion tensor MR images with explicit orientation optimization. Med Image Anal. 2006;10:764–785. doi: 10.1016/j.media.2006.06.004. [DOI] [PubMed] [Google Scholar]
- Zhang H, Yushkevich PA, Gee JC. Registration of Dissufion Tensor Images. CVPR. 2004:842–847. [Google Scholar]
- Ziyan U, Sabuncu MR, O’Donnell LJ, Westin CF. Nonlinear registration of diffusion MR images based on fiber bundles. Med Image Comput Comput Assist Interv Int Conf Med Image Comput Comput Assist Interv. 2007;10:351–358. doi: 10.1007/978-3-540-75757-3_43. [DOI] [PubMed] [Google Scholar]