

Abstract
This paper illustrates and extends an efficient framework, called the square-root-elastic (SRE) framework, for studying shapes of closed curves, that was first introduced in [2]. This framework combines the strengths of two important ideas - elastic shape metric and path-straightening methods - for finding geodesics in shape spaces of curves. The elastic metric allows for optimal matching of features between curves while path-straightening ensures that the algorithm results in geodesic paths. This paper extends this framework by removing two important shape preserving transformations: rotations and re-parameterizations, by forming quotient spaces and constructing geodesics on these quotient spaces. These ideas are demonstrated using experiments involving 2D and 3D curves.
1 Introduction
Shape analysis of closed curves, in two, three, or higher dimensions, has become an important topic of study. In particular, a large number of mathematical representations and metrics have been proposed to analyze shapes of such curves, albeit mostly in two-dimensional situations. Despite the large variety in metrics proposed, there is an emerging consensus on the suitability of the elastic metric for curve-shape analysis. This metric uses a combination of bending and stretching/compression to find optimal deformations from one shape to another. Additionally, it is invariant to re-parameterizations of curves. On pre-defined shape spaces of curves, these deformations are computed as shortest paths, or geodesics, under this chosen metric. This metric was suggested by Younes [13] and Mio et al. [6,7]; the latter developed a shooting method to compute geodesic paths between arbitrary shapes. Several other authors, including Michor and Mumford [5] and Shah [11], have also highlighted the advantages of this metric.
Although there is continuing research on various shape representations and metrics, we point out that the computational evaluations of different approaches are yet to be performed. For instance, we can ask the question: Amongst the different representations, such as coordinate functions, angle functions, curvature functions, log-speed functions, and deformation vector fields, introduced for shape analysis of parameterized curves, which is the most efficient one for elastic shape analysis? We elaborate this question further. Consider the representation of a planar curve β by its velocity vector , seen as a complex scalar r(s)eiθ(s). Here r(s) is the instantaneous speed and θ(s) is the angle made by with the positive X axis. Mio et al. [7] use the pair (ϕ, θ), with ϕ = log(r), to represent and analyze the shape of β. Other researchers have used r directly, or its integral form ∫ r(s)ds, as representatives of speeds of curves. In this case, the elastic metric assumes a complicated form due to the requirement of invariance to parameterizations. Secondly, it may not be computationally efficient. As an example, in case of Mio et al., the elastic metric translates into the form,
| (1) |
This metric given by Eqn. 1, under the (ϕ, θ) representation varies from point to point on the shape manifold, and is thereby complicated to implement.
Recently, Joshi et al. [2] proposed a new framework that uses the square-root of the speed of the curve and greatly simplifies the computation of geodesics. Additionally, it applies a more stable as well as an efficient, path-straightening approach for finding geodesics. This framework has been called the Square-Root Elastic (SRE) framework, since it uses the square-root representation to obtain an elastic analysis of curves. The SRE framework has the following advantages. Under this representation, the elastic metric reduces to a simple metric. Not only is the metric the same at all points, but it is also much simpler to implement and study. The SRE framework combines the strengths of the elastic metric and the path straightening method for finding geodesics. Furthermore, there are convenient, isometric mappings from the proposed representation to other forms used previously. Finally, this approach is applicable to study of curves in for all n and not just n = 2.
In this paper, our focus is on the shapes of curves, rather than the curves themselves. The paper [2] constructed a space of closed curves in , and presented algorithms for computing geodesic paths between curves in . However, there are infinite number of elements in that represent the same shape. The reason for this multiplicity is that rigid rotations and re-parameterizations of a curve can result in different elements of , but they all have the same shape. The sets of such representations are called orbits, and they form equivalent classes of shapes. For the purpose of shape analysis of curves, one needs to remove these shape-preserving transformations from the representation, and to compute geodesic paths in the resulting shape (quotient) space, called . The shape space is viewed as the quotient of under the rotation SO(n) and re-parametrization groups, i.e. . To find geodesics in , one needs to find the shortest geodesic path(s) between elements of orbits in . Previous papers have used different techniques for removing these transformations. Since most of the past papers have studied curves in , where the rotation space is simply one-dimensional, one can do so using the exhaustive search [4]. The group of all re-parameterizations is often removed using the dynamic programming algorithm to match points across curves [7,10]. In this paper, we present a gradient approach that uses the differential geometry of these transformation groups, SO(n) and , to match any two curves. The basic idea is to initialize a geodesic path in between arbitrary elements of the two given orbits, and to use the gradient directions on these spaces to iteratively reduce the geodesic length until one reaches a geodesic path in .
The remainder of the paper is organized as follows. Section 2 summarizes the SRE framework for analyzing curves; it presents the square-root representation of curves and the path-straightening approach to finding geodesics in . Section 3 presents the main results of this paper: defining shape space and computation of geodesic paths in . This is followed by some experimental results in Section 4 and a short summary in Section 5.
2 Square-Root Elastic (SRE) Framework
Next, we summarize ideas presented in [2] for elastic matching of closed curves in . There are two main ideas here: (i) the use of square-root representation of curves, and (ii) the use of path-straightening flows for computing geodesic paths. We summarize each of these ideas here, and refer the reader to [2] for further details.
2.1 Square-Root Representations of Curves
For the interval I ≡ [0, 2π], let β : I → be a curve with a non-vanishing derivative everywhere. Denote its shape by the function q : I → as follows,
| (2) |
Here, s ∈ I, , and is taken to be the standard Euclidean inner product in . The quantity ∥q(s)∥ represents the square-root of the instantaneous speed of the curve β, whereas the ratio is the unit tangent vector for each s ∈ [0, 2π) along the curve. Indeed, the curve β can be recovered from q using . Let , and ∀s, q(s) ≠ 0} be the space of all vector valued functions representing the curves as described above. This is an open subset of the infinite-dimensional vector space of all functions on I. Each element of this set represents an elastic curve on . Denote as the space of all unit-length, elastic curves. The closure condition for a curve β implies that . For the square-root representation, this translates to . Define a mapping according to . The space obtained by the inverse image is the space of all closed, elastic curves. Then, the subset is the space of all unit-length, closed and elastic curves that are invariant to translation and scaling.
The length of a geodesic or the “shortest path” between two points on a manifold depends on the Riemannian metric, which is an inner product defined on each tangent space of the manifold. Thus we would like to construct a tangent space at each point q. We observe that the tangent space of is the space of all vector valued functions with components. We define an inner-product on as follows.
Definition 1. Given a curveq , and the tangent vectors u, respectively, the inner product between u, v is defined as,
| (3) |
In order to define the space of tangent vectors to , we derive the normal space of at q first. As shown in [2], the normal space of at q is
where ei is a unit vector in along the i coordinate axis. Given a curve q ∈ , and the tangent vector w to at q, the tangent space of at q is defined as .
2.2 Path Straightening Flows for Computing Geodesics
Given two curves q0 and q1, our goal is to find a geodesic between them in under the Riemannian metric specified in Eqn. 3. In the path straightening approach, first introduced in [3], the given shapes are connected by an initial arbitrary path that is iteratively “straightened” so as to minimize its length. This iteration is performed using the gradient of an energy E, until one reaches a critical point of E. Let be any path in . Then, the critical points of the energy
| (4) |
are geodesics in (see [12]). In order to minimize the integral in Eqn. 4, we need to find the gradient of the energy E[α] in the space of all paths on . For this purpose, we define as the collection of all paths in , and as the collection of all paths going
from q0 to q1. Since each element along the path α is a curve in , the tangent space Tα() is written as . Following [3], we impose the Palais metric [8] on Tα() to result in a Riemannian structure on the space of all paths . For u1,, the Palais metric is given by the inner product,
| (5) |
where denotes a covariant derivative. The gradient of E[α] is a vector field in the tangent space Tα(), where .
To derive the gradient vector field of E[α] on Tα(), we state the following theorem from [3] without proof.
Theorem 1. The gradient vector field of E is given by a v in Tα() such that , and v(0) = 0.
Theorem 1 implies that the gradient of E in Tα() is given by covariantly integrating the velocity vector field along the curve α. Once the gradient in Tα() is obtained, it can be orthogonally projected into Tα() to obtain the required gradient for iteratively updating α. This projection is specified using the following lemma.
Lemma 1. The orthogonal complement of the tangent space Tα() in Tα() is given by .
Using this Lemma, a tangent vector field can be projected onto Tα() by subtracting a component w of v that satisfies ; this property makes w a covariantly linear vector field. In our case, w is given by , where is a backward parallel transport of the vector field v(1) along α. After obtaining the gradient of the energy E[α] in , we can update the path α in the direction of the gradient field v.
Now we can combine all the previous steps to compute geodesics in the space . The first step is the initialization of a path α on . Using the initialized path α, Algorithm 1 summarizes various steps using the path-straightening approach in computing the geodesic. The resulting geodesic distance between the two curves is then given by , where is the resulting geodesic path.
Algorithm 1.
Given q0, , compute a geodesic between them
|
3 Removing Shape Preserving Transformations
So far, we have constructed geodesics between a pair of curves in the . In doing so, we implicitly assumed that the starting points of both the curves were fixed, and the rotational alignment remained unchanged. However the “shape” of a curve remains invariant under rotations as well as the choice of starting point along the curve. Furthermore, the appearance of a curve, including its pose (scale, location, and orientation) is also invariant to the speed of traversal along the curve. In the following subsections, we define the space of elastic shapes, and outline an optimization algorithm that measures the “elastic” distance between curves under certain well-defined shape-preserving transformations.
3.1 Elastic Shape Space ()
The idea of matching shapes of objects by studying their deformations under appropriate group actions is well known [1]. Following a slightly different approach, we are interested in constructing the shape space as a quotient space of , modulo shape preserving transformations such as rigid rotations and re-parameterizations. In addition to translation and scaling, we identify the following re-parameterizations and group actions on the curve that preserve its shape.
Placement of origin (seed): A change in the starting point of the curve is represented by the action of a unit circle on q, according to r · q(s) = q((s − r)mod 2π) for r ∈ [0, 2π] with 0 and 2π identified.
Rigid rotation: A rigid rotation of a curve is considered as a group action by a n-by-n rotation matrix On ∈ SO(n) on q, and is defined as On · q(s) = Onq(s), ∀s ∈ [0, 2π).
Re-parametrization by speed: A curve traveled at arbitrary speeds is said to be re-parameterized by a non-linear differentiable map γ (with a differentiable inverse) also referred to as a diffeomorphism. We define as the space of all orientation-preserving and origin-preserving diffeomorphisms. Then, the resulting variable speed parameterizations of the curve can be thought of as diffeomorphic group actions of on the curve q. This group action is derived as follows. Let q be the representation of a curve β. Let α = β(γ) be a re-parametrization of β by γ. Then the respective velocity vectors can be written as . The re-parametrization of q by γ is defined as a right action of the group on the set and written as . Figure 1 shows an example of a re-parameterized curve by an arbitrary γ. The change in the speed due to re-parametrization is observed by discrete points plotted along the curve.
Fig. 1.
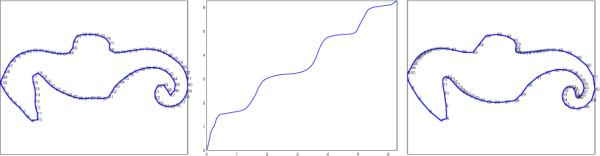
From left, an unit-speed 2-D curve, γ acting on the curve, and the re-parameterized curve
Altogether, the set of curves affected by the group actions above, partition the space into equivalent classes. We now define the elastic shape space as the quotient space . The problem of finding a geodesic between two shapes in is same as finding the shortest path between the equivalent classes of the given pair of shapes. Since the actions of the re-parametrization groups on constitute actions by isometries, this problem also amounts to minimizing the length of the geodesic path, such that
| (6) |
Conceptually, this involves finding an optimal rotational alignment (), seed (), and an optimal speed parameterization () that minimizes the distance given by Eqn. 6. As a result of this optimality, the geodesic path becomes orthogonal to the respective orbits of SO(n) and . We propose an iterative solution using a gradient descent approach that successively causes the projection of the tangent vector (αt(1)) on each of these orbits, to be zero. In practice, we divide the problem in two steps. At every iteration, we will first find a geodesic in the quotient space under all rotations, and use it as an initial condition for computing the geodesic in the elastic shape space until the algorithm converges.
3.2 Geodesics in
We briefly discuss the computation of geodesics in the space after removing all rotations and seed placements. We recall that the orbit of any element under a group action g ∈ G is the set Gq = {q · g : g ∈ G}. Given a pair of shapes q0 and q1, the idea is to construct a tangent space of the orbit Oq1 of q1 under the group action by On ∈ SO(n) and iteratively make the projection of the tangent vector αt(1) on Tq1(Oq1) to be zero. We will adopt the approach similar to Klassen et al. and refer the reader to [3] for details. Furthermore, the optimal seed is given by . In practice, for a discrete representation (T samples), the optimal seed is given as . Together, the above minimization approach yields a locally optimal alignment in terms of the rotation and placement of origin. Although this approach works for n–dimensional curves, one can adopt other efficient methods for low-dimensional curves. Particularly in the case of 2D curves, we can take advantage of the fact that the group of rotations SO(2) is a 1-dimensional manifold. In this case, we can discretize the angle and using the , search in the orbit of Oq1 to achieve an optimal rotational alignment. As an example, Fig. 2 shows the variation of the geodesic path energy in against the rotational alignment. The path corresponding to O = Oopt is the geodesic in .
Fig. 2.

Left: Path energy vs. the angle of rotation. Right: Geodesic Path corresponding to the optimal alignment.
3.3 Geodesics in
In order to compute geodesics in the quotient space of elastic shapes, , we follow a similar idea as above. This time, we define an orbit of q1 under the group action by . An optimal elastic alignment between any two shapes q0 and q1 is obtained, when the projection of the tangent vector αt(1) on the subspace is zero. Instead of posing the optimization problem on the subspace , we consider the tangent space of at identity , which is an space and construct 1-parameter flows on as follows. Let represent a 1-parameter flow at identity on such that ψ0(id, g)= s for any tangent vector . Next, we define the diffeomorphic group action . Then the differential ϕ* maps the tangent vector g to and is given by,
| (7) |
Let V ≡ {vi}, i = 1, …, d denote the Fourier basis for the tangent space of . Using the differential map ϕ*(V), we can construct the basis for the tangent space . Following the previously outlined approach, we compute a geodesic between shapes represented by q0 and q1 in . In the process of computing this geodesic, the shape q1 gets rotated and shifted as , where and . We then project the tangent vector αt(1) on . For a tangent vector , its projection on is defined as
| (8) |
Using the inverse of ϕ*, we can construct a tangent vector and compute 1-parameter flows on . The above procedure is repeated until the quantity ⟨π(αt(1), π(αt)⟩ becomes zero. Shown in Fig. 3 is a cartoon diagram illustrating this process. The complete procedure of finding a geodesic in is described in Algorithm 2. As an example, Fig. 4 shows the comparisons between
Fig. 3.

Illustration of the process of finding geodesics in
Algorithm 2.
Given two curves q0 and q1, compute a geodesic in
|
Fig. 4.

Odd rows show non-elastic geodesic paths [4]. Even rows show elastic geodesics.
non-elastic geodesics computed using the method in [4] and elastic geodesics computed using algorithm 2.
4 Experimental Results
In this section, we present some experimental results for computing elastic geodesics by implementing the above algorithms in MATLAB®. Figure 5 shows pairwise geodesics between 2-D curves in the shape space . Intermediate shapes along the geodesics have tick-marks placed around the curve, that help identify parts of the curve traversed by non-uniform speed. Figure 6 shows two different views of a geodesic path computed between a pair of 3-D curves in .
Fig. 5.

Row-wise geodesic paths in between the pair of curves shown to the left
Fig. 6.

Examples of geodesics between a pair of 3-D curves
Next, we present a few examples of geodesic paths between 3D curves of real data consisting of salient curves extracted from human facial surfaces. Samir et al. [9] have used 3D curve matching for the purpose of face recognition. The idea here is to extract important curves from 3D scans of facial surfaces across subjects, and use pairwise geodesic distances to match them. Figure 7 (a) shows 2D views of a facial surface over-laid with 3D curves resulting from a specific depth function. Figure 7 (b) shows different views of a geodesic in between two arbitrarily selected curves on this surface.
Fig. 7.

(a) Example facial surfaces with salient curves marked. (b) Two different views of a geodesic between two facial curves.
Finally, we present a clustering result of a sample of 25 shapes of gestures from the ASL alphabet. We compute the pairwise elastic geodesic distances between the set of shapes shown in Fig. 8 and use a simple k–means algorithm to automatically group them into 5 clusters. It is observed that the elastic distance captures local variabilities effectively, an important requirement in clustering of shapes.
Fig. 8.

Left panel shows 25 gestures from the ASL alphabet. Right panel shows row-wise clusters of gestures.
5 Summary
This paper illustrates and extends the square-root elastic (SRE) framework introduced recently in [2] for analyzing shapes of closed curves in . The novelty in this framework is that the representation of elastic curves by a single vector valued function that incorporates both stretching and bending along the curve. The elastic (Riemannian) metric reduces to a simple form that greatly simplifies analysis and understanding of shapes of curves. This paper extends this idea by computing geodesics on the quotient spaces formed by the action of rotation and re-parametrization groups on the spaces of closed curves. The main idea is to use a gradient iteration to find a geodesic path between any two orbits. Experimental results, obtained on 2D and 3D curves, underline the utility of using elastic metrics and emphasize the generality of these ideas to higher dimensions.
Acknowledgments
We thank Chafik Samir ENIC, Lille, France, for the use of 3D facial curves. This research was partially supported by ARO W911NF-04-01-0268 and AFOSR FA9550-06-1-0324. Dr. Eric Klassen gratefully acknowledges support from the NSF grant 0430954. This research was also supported by INRIA/Florida State University Associated Team “SHAPES grant and a Visiting Professorship from INRIA to Anuj Srivastava during the summer of 2006.
References
- 1.Grenander U. General Pattern Theory. Oxford University Press; Oxford: 1993. [Google Scholar]
- 2.Joshi S, Klassen E, Srivastava A, Jermyn IH. Proc. IEEE Computer Vision and Pattern Recognition (CVPR) Minneapolis, USA: Jun, 2007. An efficient representation for computing geodesics between n-dimensional elastic shapes. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 3.Klassen E, Srivastava A. Geodesics between 3D closed curves using path straightening. In: Leonardis A, Bischof H, Pinz A, editors. ECCV 2006. LNCS. vol. 3951. Springer; Heidelberg: 2006. pp. 95–106. [Google Scholar]
- 4.Klassen E, Srivastava A, Mio W, Joshi SH. Analysis of planar shapes using geodesic paths on shape spaces. IEEE Trans. Pattern Analysis and Machine Intelligence. 2004;26(3):372–383. doi: 10.1109/TPAMI.2004.1262333. [DOI] [PubMed] [Google Scholar]
- 5.Michor PW, Mumford D. Riemannian geometries on spaces of plane curves. J. Eur. Math. Soc. 2006;8:1–48. [Google Scholar]
- 6.Mio W, Srivastava A. Elastic-string models for representation and analysis of planar shapes. Proc. IEEE Conf. Comp. Vision and Pattern Recognition. 2004:10–15. [Google Scholar]
- 7.Mio W, Srivastava A, Joshi SH. On shape of plane elastic curves. International Journal of Computer Vision. 2007;73(3):307–324. [Google Scholar]
- 8.Palais RS. Morse theory on Hilbert manifolds. Topology. 1963;2:299–349. [Google Scholar]
- 9.Samir C, Srivastava A, Daoudi M. Three-dimensional face recognition using shapes of facial curves. IEEE Trans. Pattern Anal. Mach. Intell. 2006;28(11):1858–1863. doi: 10.1109/TPAMI.2006.235. [DOI] [PubMed] [Google Scholar]
- 10.Sebastian TB, Klein PN, Kimia BB. On aligning curves. IEEE Transactions on Pattern Analysis and Machine Intelligence. 2003;25(1):116–125. doi: 10.1109/TPAMI.2004.1273924. [DOI] [PubMed] [Google Scholar]
- 11.Shah J. An H2 type riemannian metric on the space of planar curves. In: Larsen R, Nielsen M, Sporring J, editors. MICCAI 2006. LNCS. vol. 4190. Springer; Heidelberg: 2006. [Google Scholar]
- 12.Spivak M. A Comprehensive Introduction to Differential Geometry. Vol I & II. Publish or Perish, Inc.; Berkeley: 1979. [Google Scholar]
- 13.Younes L. Computable elastic distance between shapes. SIAM Journal of Applied Mathematics. 1998;58(2):565–586. [Google Scholar]