

Abstract
The rapid pace of the development of satellite wildlife tracking tools has left little time for thorough testing of new equipment and identifying possible sources of technical failures. In the Gobi and Eastern Steppe region of Mongolia we deployed 98 satellite collars, collecting animal locations using the Doppler based Argos (n = 29) or the global positioning system (GPS; n = 69), on 45 Asiatic wild asses (Equus hemionus), 34 Mongolian gazelles (Procapra gutturosa), 15 Przewalski’s horses (E. ferus przewalskii), eight wild Bactrian camels (Camelus ferus), and two wolves (Canis lupus). Although, we collected valuable data from little-known species in a remote environment, of 98 collars deployed, only 29 worked as good as or better than expected whereas 69 were subject to technical problems. The majority of problems had to do with a reduced performance of the Argos component (n = 12), with both the Argos and the GPS components (n = 1), or with the Argos component in combination with another unknown problem (n = 12). Further problems were caused by human error during manufacturing or deployment (n = 10), software bugs (n = 7), mechanical failures (n = 5), poor GPS performance (n = 1) and premature failures for unknown reasons (3 ≤ n ≤ 21). The better performance of Argos only collars on Mongolian gazelles and of collars not attached to an animal suggest that a large body mass reduces the Argos signal below a critical threshold. Consequently, we presently would not recommend the use of collars depending on an Argos unit for data collection or transfer on large bodied ungulates in central Asia. Although, several premature failures may have been caused by animals being poached, our failure rate remains high and indicates that managers and researchers need to be aware that there is a high risk of equipment failure when applying newly emerging satellite tracking technology. This implies logistic and financial uncertainties which may be difficult to explain to the scientific community, the public, management- and funding agencies alike. We recommend the development of a web-based platform where users and producers of telemetry products can quickly post and exchange their experiences.
Keywords: Argos, collar evaluation, Global Positioning System (GPS), Mongolia, Satellite telemetry
Introduction
Since its introduction in the early 1960s, radio telemetry has become the most important method to study activity patterns, movements and habitat use of many wildlife species [1,2,3,4]. In the early years, animal were largely fitted with Very High Frequency (VHF) radio transmitters and located with hand-held receivers from the ground or from aircraft. Although the new technique provided completely new insights into many aspects of wildlife ecology, it remained labour intensive and was often compromised by environmental and logistic constraints [5].
In 1978 the Argos satellite system became available for civilian use and soon allowed the remote tracking of tagged wildlife over large distances. In the initial years the use of Argos Platform Transmitter Terminals (PTTs) was restricted to large bodied carnivores and ungulates due to the weight of the tags [6,7]. However, with the advent of smaller microcontrollers, lighter batteries, and solar panels, the weight of satellite tags decreased dramatically. The main drawback of the Argos positioning system remained the large location error (150-1,500m; [8]), and the varying degree of successful transmitter uplinks depending on topography [9], latitude [10] and power level (Kaczensky unpubl. data).
In 1994, the first Global Positioning System (GPS) collar became available for tracking wildlife [11]. The location error was <100 m, and the user could precisely define the time intervals between successive locations [12]. However, an animal equipped with a GPS tag actually carries a receiver and not a transmitter. The new challenge became acquiring the data stored-on-board of the tag [13]. New low power technology soon made it possible to equip GPS collars with an additional transmitter that could relay GPS data via radio-transmission (VHF or UHF), another satellite system (e.g., Argos [14]; Immarsat [15]; Iridium or Globalstar [e.g. http://www.vectronic-aerospace.com/wildlife.php]) or the digital Global System for Mobile (GSM) phone network [16,17]. The advantages of these new units were precise locations on a pre-defined schedule, remote data access, and – at least in theory - easily calculable and predictable costs.
Although various reports have addressed factors affecting Argos and GPS fix rate and precision (e.g., [18,19,20,21,22,23,24,25]), little can be found on the probability and causes of transmitter failures due to technical problems [26]. As with every technical development, new equipment is prone to failure and researcher expectations from their telemetry material may be overly optimistic considering the harsh and unpredictable nature of its deployment.
However, these high expectations are partly due to the fact that technical failures are rarely made public. We argue that reporting technical failures will help accelerating equipment improvement, while at the same time reducing unaccomplishable success pressure on the users and producers. In this paper we report about our experiences using different configurations of Doppler based Argos, GPS-Argos collars that relay GPS data via the Argos satellite system and GPS store-on-board (SOB) collars on five far-ranging large mammal species in the Gobi and Eastern Steppe regions of Mongolia. As we never attempted to conduct a field test of the various configurations of satellite collars, our data is inductive rather than hypothesis driven. Furthermore, the many possibly variables influencing collar performance only allow for a semi-quantitative assessment. However, the main rational behind this manuscript is to raise awareness of the problems and constraints of this extremely important technology, dampen expectations, and suggest means to improve future success rates.
Study area
The Gobi covers roughly 300,000 km2 of desert steppe and desert in southern Mongolia and the adjacent Eastern Steppe covers another 300,000 km2 of grass dominated plains. The climate of southern- and eastern Mongolia is strongly continental with long cold winters and short hot summers. Our four study areas were located in the Great Gobi B Strictly Protected Area (SPA; 9,000 km2), the Great Gobi A SPA (44,000 km2), the south-eastern (SE) Gobi (~100,000 km2) and the western part of the Eastern Steppe. Elevations range from 550 to 3,750 m, but large portions of the Gobi and the entire Eastern Steppe are characterized by flat terrain. Average annual precipitation ranges from 50 mm in Great Gobi A SPA, to 100 mm in Great Gobi B SPA, to 200 mm in parts of the SE Gobi and up to 300 mm in the Eastern Steppe [27]. The plant community is widely dominated by low and sparse vegetation. Trees are extremely rare and restricted to a few oasis complexes and along riverbeds [28].
The ungulate community consists of goitered gazelle (Gazella subgutturosa), Mongolian gazelle (Procapra gutturosa), saiga (Saiga tatarica), Asiatic wild ass (Equus hemionus), reintroduced Przewalski’s horse (Equus ferus przewalskii), and wild Bactrian camels (Camelus ferus) on the plains, and Siberian ibex (Capra sibirica) and argali sheep (Ovis ammon) in the mountains [29]. Large mammalian predators in the Gobi and Eastern Steppe ecosystem are wolves (Canis lupus), snow leopards (Panthera uncia) and a very rare ecotype of brown bear, the Gobi bear (Ursus arctos).
Material & Methods
Satellite Collars
Between October 2001 and July 2008, we deployed 98 satellite collars of 12 different configurations produced by two different commercial companies (NorthStar, Baltimore, USA, n = 11 and Telonics, Mesa, Arizona, USA, n = 74) and 1 university research institute (Research Institute of Wildlife Biology (FIWI), University of Veterinary Medicine in Vienna, Austria, n = 13). Forty-four different collars were deployed on 45 Asiatic wild asses, 30 collars on 34 Mongolian gazelles, 14 collars on 15 Przewalski’s horses, eight on wild Bactrian camels and two on wolves (Table 1). For details on capture and chemical restraint see [30,31,32,33]. For animal welfare reasons and to allow collar retrieval, 44 collars were equipped with pre-programmed drop-off devices (CR-2A, Telonics, Mesa, Arizona, USA) and eight with drop-off devices which could be remotely released via a VHF link (Drop_Rx_R, Lotek, Newmarket, Ontario, Canada; Fig. 1, Appendix 1). Seven collars were used again after refurbishing by the company and were treated as independent events, which might have slightly positively biased our sample as collars that failed or had major problems were unlikely to be retrieved and re-deployed. Six collars were re-deployed without refurbishing after an early death of the collared animal, but were treated as one unit for collars assessment.
Table 1.
Summary statistics of 98 satellite collars deployed in Mongolia 2001-2008.
| Collars Species | Individual animals |
Study area | Year of deployment |
Expected life span (months) |
Collars with technical problems |
Problem category | Collars with better performance |
Drop-offs | Collars retrieved |
Mean Argos performance during real lifespan (%) |
Mean GPS performance during real lifespan (%) |
Mean net final success (%) |
|
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Argos only collars (animals are located using the Doppler shift method by the Argos satellite system) | |||||||||||||
| NorthStar Argos, 0.5 Watt, ~600g | |||||||||||||
| 1 | Prze walski’s horse |
1 | Great Gobi B | 2002 | 26 | 1 | unknown | 0 | 1 Telonics | 1 | 72 | --- | 31 |
| 3 | wild ass | 4 | Great Gobi B | 2002-2003 | 26 | 1 | Argos | 1 | 4 Telonics | 3 | 91 | --- | 67 |
| Telonics ST-18 A3 200 Argos, 0.5 Watt, ~550g | |||||||||||||
| 4 | Mongolian gazelle |
5 | SE Gobi | 2002-2003 | 28 | 1 | unknown | 3 | 0 | 1 | 314 | --- | 100 |
| Telonics ST-20 A3200 Argos, 0.5 Watt, ~700g | |||||||||||||
| 5 | Mongolian gazelle |
8 | E Steppe & SE Gobi |
2002-2004 | 28 | 0 | --- | 5 | 0 | 3 | 344 | --- | 100 |
| Telonics St-20 A3210 Argos, 0.5 Watt, new external Argos antenna on top, ~700g | |||||||||||||
| 20 | Monolian gazelle |
20 | SE Gobi | 2007 | 40 | 12 | 3 Argos, 2 Argos/ unknown 7 unknown |
2 | 0 | 0 | 115 | --- | 60 |
| Telonics ST-20 A3310 Argos, 0.5 Watt, new external Argos antenna on top, ~1000g | |||||||||||||
| 2 | wild ass | 2 | SE Gobi | 2007 | 30 | 2 | 2 unknown | 0 | 0 | 0 | 197 | --- | 28 |
| Telonics ST-20 A3310 Argos, 0.5 Watt, new external Argos antenna on top, ~1000g | |||||||||||||
| 14 | wild ass | 14 | SE Gobi | 2007 | 60 | 14 | 9 Argos/unknown, 5 unknown |
0 | 0 | 37 | --- | 4 | |
| 49 |
Summary
statistics |
54 | 31 | 11 | 5 | 8 | 142 | --- | 50 | ||||
| GPS-Argos collars (GPS locations are transmitted by the Argos satellite system, but are additionally stored on board of the collar) | |||||||||||||
| NorthStar GPA-Argos, 0.5 Watt,~1000g | |||||||||||||
| 7 | Prze walski’s horse |
8 | Great Gobi B | 2001-2005 | 24 | 4 | 1 Argos & GPS, 1 mechanical, 2 unknown |
0 | 6 Lotek, 1 Telonics |
5 | --- | 45 | 35 |
| NorthStar GPS-Argos, 0.5 Watt, ~650g | |||||||||||||
| 1 | Mongolian gazzle |
1 | SE Gobi | 2003 | 16 | 1 | unknown | 0 | 0 | 0 | --- | --- | 2 |
| Telonics TGW 3580 GPS-ARGOS, 0.5 Watt, ~700g | |||||||||||||
| 2 | wolf | 2 | Great Gobi B | 2003-2004 | 19 | 1 | Argos | 1 | 1 Telonics | 2 | --- | 86 | 93 |
| 3 | Prze Walski’s horse |
3 | Great Gobi B | 2003-2005 | 19-24 | 2 | 1 Argos, 1 GPS | 0 | 1 Telonics, 2 Lotek |
3 | --- | 63 | 62 |
| 11 | wild ass | 11 | Great Gobi A, Great Gobi B & SE Gobi |
2003-2006 | 16-24 | 9 | 6 Argos, 1 Argos/ unknown, 2 unknown |
0 | 11 Telonics | 4 | --- | 92 | 43 |
| 3 | wild camel | 3 | Great Gobi A | 2005 | 11 | 3 | 3human error- user |
0 | 3 Telonics | 0 | --- | --- | 0 |
| Telonics TGW 3580 GPS-ARGOS, 0.5 Watt, new external Argos antenna on top, ~700g | |||||||||||||
| 1 | wild ass | 1 | Great Gobi A | 2007 | 12 | 1 | mechanical | 0 | Telonics | 0 | --- | --- | 22 |
| 1 | will camel | 1 | Great Gobi A | 2007 | 13 | 0 | --- | 0 | Telonics | 1 | --- | 98 | 93 |
| 29 |
summary
statistics |
30 | 21 | 1 | 27 | 15 | --- | 74 | 43 | ||||
| GPS-Argos/CR collars (GSP-Argos collars wrer programmed to work primarily in store-on-board modus while on the animal and to start transmitting GPS locations via the Argos satellite system after drop-off to allow collar retrieval (CR)) | |||||||||||||
| Telonics TGW3580 GPS-ARGOS, 1 Watt, ~700g | |||||||||||||
| 3 | wild ass | 3 | Great Gobi A | 2007 | 19-20 | 3 | 3 human error- producer |
0 | 3 Telonics | 2 | --- | 92 | 59 |
| 4 | wild camel | 4 | Great Gobi A | 2007 | 19-21 | 4 | 4 human error- producer |
0 | 4 Telonics | 2 | --- | --- | 18 |
| 7 |
Summary
statistics |
7 | 7 | 0 | 7 | 4 | 95 | 50 | |||||
| GPS-SOB collars (GPS collars that store all GPS locations on board of the collar) | |||||||||||||
| FIWI GPS-SOB, ~700g | |||||||||||||
| 10 | wild ass | 10 | Great Gobi B | 2007 | 12 | 9 | 7 software, 2 mechanical |
0 | 10 Telonics | 10 | --- | 37 | 11 |
| 3 | Prze walski’s horse |
3 | Great Gobi B | 2007-2008 | 1-12 | 1 | 1 mechnical | 0 | 3 Telonics | 2 | --- | 99 | 66 |
| 13 |
Summary
statistics |
13 | 10 | 0 | 13 | 12 | --- | 97 | 24 | ||||
[Collars = N collars new or refurbished deployed, Individual animals = N animal collared including re-use of a collar, Expected lifespan = as calculated by the producer, Argos performance (%) = (Obtained Argos locations / Expected Argos locations for the real lifespan)*100; GPS performance success (%) = (GPS locations via collar download / Expected GPS locations for the real lifespan)*100; Mean net final success (%) = (sum of all unique locations either via Argos uplink or collar download / Expected locations for the real lifespan)*100; truncated at100%.]
Fig. 1.

Examples of the main collar configurations used on Przewalski’s horses (Equus ferus przewalskii), Asiatic wild asses (Equus hemionus), Bactrian wild camels (Camelus ferus), Mongolian gazelles (Procapra gutturosa) and wolves (Canis lupus) in the Gobi regions of Mongolia 2001-2008.
Forty-nine collars determined animal locations using the Doppler shift method through the Argos satellite system (Argos only), 36 collars used the Argos system primarily for data transfer of GPS locations (GPS-Argos) and 13 collars stored GPS locations on board of the collar (GPS-SOB) without the option of remotely transmitting the information (Fig. 1, Table 1, Appendix 1).
Depending on species and configurations, collar weight varied from 550 to 1,000g (Appendix 1). Collar belt material consisted either of two layers of stitched and glued synthetic material or of two layers of stitched and oiled leather (Fig. 1). The battery cases were metal, metal embedded in a high-density polymer, a combination of metal and synthetic material, or synthetic material only (Fig. 1). All collars were equipped with a VHF unit with a separate power supply. This VHF unit was either bolted to the collar as a stand-alone unit, or integrated into the main battery pack (Fig. 1). VHF antennas were designed to protrude either fully, partially, or not at all from the belting. VHF units were programmed to run continuously or to shut down periodically to save battery (see Appendix 1).
GPS antennas were located on the dorsal aspect of the collar and connected to the battery case by cables running between the two layers of collar belt material. Units were programmed to collect GPS location at 0.25-13 hour intervals. Transmission power to the Argos satellite system was set at 0.5 or 1.0 Watts. Argos antennas were mostly or fully external; thin and flexible or thick and sturdy and either protruded on the side or on the dorsal aspect of the collar (Fig. 1). Argos repetition rate was set at 63 or 93 seconds to allow Argos positioning and data transfer (all Argos only and NorthStar GPS-Argos collars) and 200 seconds for data transfer only (Telonics TGW-3580 GPS-Argos collars). All collars with Argos uplink were programmed to reach the Argos satellite system during a 7-hour window on programmed days. All Argos only collars on Mongolian gazelles and most on Asiatic wild asses were programmed for long term monitoring and only collected Argos locations once a week. The remaining Argos only collars were programmed to collect Argos locations daily.
We initially set up GPS-Argos collars to uplink to the Argos satellite system every one to three days. For a later batch of seven collars we had the output power increased from 0.5 Watt to 1 Watt. Because this change draws heavily on battery power, these collars were programmed to work primarily in store-on-board modus while on the animal and to start transmitting GPS locations via the Argos satellite system after drop-off to allow collar retrieval (CR). For this latter batch of GPS-Argos/CR collars we used the Argos uplink option only prior to deployment for testing, two days each month to check for collar presence and after drop-off for collar retrieval (retrieval mode).
Starting in 2007 we deployed GPS-SOB collars on 10 Asiatic wild asses and three Przewalski’s horses in the Great Gobi B SPA. Previous collaring with Argos only and GPS-Argos collars and monthly wildlife counts revealed that wild asses concentrate in the eastern part of the Great Gobi B SPA in July [34]. We timed collar drop-off for July and attempted retrieval of dropped collars using standard VHF telemetry. Retrieval of GPS-SOB collars from three Przewalski’s horse was believed to pose little problems because local rangers regularly survey horse groups [34]. Using GPS-SOB collars, which do not need battery power for data transfer, enabled us to attempt GPS locations every 15 minutes (0.25 hours) over 12 months.
Collar Evaluation
We evaluated collar performance and problems based on mechanical characteristics (e.g. belt material, battery case material), VHF-, Argos- and GPS unit design and configuration (e.g. antenna location, output power; Table 1, Appendix 1). Depending on the configuration and according to the producers, the majority of collars were expected to work for 12 to 60 months (expected lifespan). When animals died or collars dropped before the end of the expected lifespan we used the death / drop date as the anticipated end date and shortened the expected lifespan accordingly (real lifespan). For the six collars that we re-used without refurbishing, we reduced the expected lifespan according to the previous use. In case of premature cessation of the Argos transmission or GPS data collection, we also assessed Argos or GPS performance during the real lifespan. We subsequently rated performance as good (75-100%), moderate (50-75%), poor (30-50%) and very poor (<30%; see Appendix1). We used the following definitions and formulae:
Argos only collars:
• Expected Argos locations = one Argos transmission of quality LC1 to LC3 [8] per transmission day for the expected lifespan
• Argos performance (%) = (Obtained Argos locations / Expected Argos locations for the real lifespan)*100
• Collar performance success (%) = (Obtained Argos locations / Expected Argos locations)*100
GPS-Argos collars:
• Expected GPS locations = (24/GPS interval)*expected collar lifespan [in days]
• GPS locations via Argos = GPS locations obtained via Argos uplink
• GPS locations via collar download = GPS locations obtained due to collar retrieval and direct data download
• GPS performance success (%) = (GPS locations via collar download / Expected GPS locations for the real lifespan)*100
• Argos uplink / collar download (%) = (GPS locations via Argos / GPS locations via collar download)*100
• Collar performance success (%) = (GPS locations via Argos / expected locations)*100
• Final success (%) = (sum of all unique GPS locations either via Argos or collar download / Expected GPS locations for the real lifespan)*100
For evaluation of GPS-Argos/CR and GPS-SOB collars we only used the GPS performance criteria. For the GPS-Argos/CR collars we additionally assessed whether the Argos unit indeed allowed collar retrieval.
We calculated average success rates per collar type as the mean over the success of all individual collars, rather than expected versus received locations. For most ecological analysis, individual animals and not the total number of locations are the relevant sampling units. Thus, a collar being more successful than expected does not necessarily compensate for another collar that is less successful than expected. We therefore also calculated a net final success by truncating the performance or final success of individual collars at a maximum of 100%. In order to get realistic estimates and means of Argos and GPS performance during the real lifespan we excluded units that obviously failed (0 locations or operated for less than one month).
We rated collars as having worked better than expected, when they worked >3 months longer than expected or produced ≥130% of the expected number of locations via the Argos uplink. We considered a collar to have encountered a technical problem, when it worked ≥6 months less than expected, or in the case of Argos only and GPS-Argos collars provided <50% of the expected number of locations via the Argos uplink (Argos uplink/collar download). We defined problem categories as:
• Argos: when collar performance success was <50% (meaning either that the collars was unable to realize more than 50% of the expected locations using the Doppler shift method for the Argos only collars or was unable to transmit more than 50% of the expected GPS locations via the Argos uplink for GPS-Argos collars)
• Argos & GPS: when both collar performance and final success were <50% (meaning that for a retrieved collar GPS performance success was <50%)
• Argos / unknown: when the collar stopped prematurely and collar performance success was <50% during the real lifespan
• GPS: when GPS performance success was <50%
• Human error: when collar performance was compromised because of handling or programming mistakes on either the producer or user side
• Software: when the internal collar software determining data storage and duty cycles did not perform as programmed
• Mechanical: when collar performance was compromised by broken or damaged components
• Unknown: when collars failed prematurely and were not retrieved or when evaluation by the producer did not produce clues as to why the collar failed
Results
Success Rates
Of 98 collars deployed 104 times, we retrieve 39 (38%). Retrieval enabled us to download additional data from 16 GPS-Argos units (of which four were of the GPS-Argos/CR configuration), 13 with, and three without, technical problems. The number of GPS locations retrieved via the Argos uplink as compared to the number downloaded directly from the retrieved collars averaged 43% (range 0 to 85%) in GPS-Argos collars (Table 1). Consequently collar retrieval increased performance success from an average of 26% to a final success of 43% in the standard GPS-Argos units and allowed for a final success of 50% in GPS-Argos/CR collars despite technical problems (Table 1, Appendix 1). Final success in GPS-SOB collars is totally dependent on collar retrieval. Despite the fact that we only failed to recover one collar, the success rate averaged only 24% due to most collars experiencing technical problems.
Final success in Argos only collars is independent of collar retrieval (all successful Argos locations are automatically transmitted and no additional data is stored on board of the collar) and averaged 141%. However, the high average success of the Argos only collars is largely due to two batches of collars deployed from 2002 to 2004. The majority of those early collars worked for up to 17 months longer than expected and/or collected multiple locations per transmission day (Appendix 1). Consequently mean net final success (final success truncated at 100%) was considerably lower and averaged 50% (Table 1).
Technical Problems
We encountered technical problems with 69 collars (70%) over all configuration types: Argos (n = 12), Argos / unknown (n = 12), Argos & GPS (n = 1), human error (n = 10), software (n = 7), mechanical (n = 5), GPS (n = 1), and premature failures for unknown reasons (3 ≤ n ≤ 21; Table 1, Appendix 1).
Argos and Argos / Unknown Problems
Before 2005 we experienced problems with the Argos unit only in one Argos only and two GPS-Argos collars. However, in December 2005 we started to see a sharp drop in the success of Argos transmissions in most remaining Argos only and GPS-Argos collars, and premature cessation with previously poor performance in Argos transmission in 14 newly deployed Argos only and 12 newly deployed GPS-Argos collars (Table 1, Appendix 1).
Argos performance of Argos only collars during the real lifespan averaged 146%, but was highly variable (range 5 to 477%) within and among species. For Mongolian gazelles Argos performance during the real lifespan dropped dramatically from collars deployed in 2002-2004 to those deployed in 2007 (mean for 2002-2004: 331%, n = 9, mean for 2007: 115%, n = 20; Fig. 2). In addition, the majority of collars deployed after 2005 stopped transmitting prematurely (Table 1, Appendix 1). For wild equids, Argos performance of Argos only collars during the real lifespan was much lower (mean for 2001-2003: 86%, n = 4; mean for 2007: 37%, n = 14) than for gazelles. Final success also dropped in 2007, but primarily because all collars either failed totally or stopped transmitting 25-59 months earlier than expected. Only the two collars with the increased output power of 1.0 Watt performed somewhat better (Fig. 2, Table 1, Appendix 1).
Fig. 2.
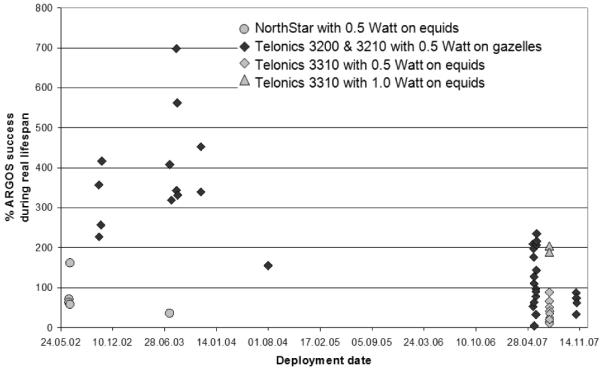
Decrease in Argos performance success during real lifespan of Argos only collars deployed on Mongolian gazelles (Procapra gutturosa) and wild equids (Equus ferus przewalskii & E. hemionus) from 2002 until 2007. [Argos performance is expressed in percent and was calculated by dividing the obtained number of Argos locations by the expected number of Argos locations based on the lifespan of the collar. Different symbols represent different collar configurations as seen in Table 1]
We had few Argos only or GPS-Argos collars operating during the deployment gap from 2002-2004 to 2007. The number of GPS locations transmitted per month by six GPS-Argos collars on wild equids, suggests that the decline in Argos performance happened at the end of 2005 / beginning of 2006 (Fig. 3a). Monthly performance of 8 Argos only collars on gazelles did not suggest a drop, but rather a steady decline in Argos performance from 2003 to 2005 (Fig. 3b). However, in 2005 the majority of gazelle collars were already well beyond their expected lifespan and thus a decline in performance did not come as a surprise.
Fig. 3.

a) The monthly number of GPS positions transmitted via the Argos satellite system for seven wild equids (Equus ferus przewalskii & E. hemionus) monitored between 2005 and 2007 suggests that a decline in Argos performance happened at the end of 2005 / beginning of 2006. b) The monthly number of Argos positions for 8 Mongolian gazelles (Procapra gutturosa) monitored between 2002 and 2007 does not suggest a drop, but rather a steady decline in Argos performance from 2003 to 2005 [Each animal is depicted by an individual symbol. Id numbers correspond with those in Appendix 1].
Collars appeared to be more successful in reaching the Argos system when not attached to the animal. Two standard GPS-Argos and three GPS-Argos/CR collars that had failed to reach the Argos satellite system while the animal was alive, reconnected again after drop-off (n = 3) or death and subsequent disintegration of the animal’s body (n = 2).
GPS and Argos & GPS Problems
With only two exceptions, GPS performance during the real lifespan was as expected and averaged 97% for GPS-SOB and 79% for standard GPS-Argos and GPS-Argos/CR collars. One collar that experienced poor GPS performance also showed a poor Argos performance.
Human Error
In November 2005, three GPS-Argos collars which were to be placed on wild Bactrian camels were initialized in Ulaanbaatar. However, due to a misunderstanding among the researchers magnets were replaced on the collars and the units were unknowingly shut down. Magnets were removed on route to the Gobi, but the initialization success was not verified. We placed the three collars on wild camels within a week, but never received an Argos transmission [35]. Most likely the collars failed to work because of a faulty second initialization procedure by ourselves.
In January 2007, six months after deployment, the seven GPS-Argos/CR collars revealed a programming error by the producer. The units switched into the retrieval mode in December 2007 instead of December 2008 – a year earlier than planned. As a consequence, batteries for the GPS and Argos units were expected to expire in September/October 2008, well before the drop-off release date. Nevertheless, we were eventually able to retrieved four collars from this batch (one due to the faulty and premature opening of a drop-off device, one due to the death of the animal, one ultimately reached the Argos satellite system after drop-off and one was retrieved via a ground search using the VHF transmitter).
Software Problems
We encountered software problems only in the GPS-SOB units deployed in 2007. Of the 13 units, seven stopped working prematurely and then overwrote most of the stored data on the solid-state flash drive. Of the 10 collars deployed on wild asses, only one unit worked without problems over 12 months. Two units deployed on Przewalski’s horses were only deployed for six weeks and worked as expected
Mechanical
Mechanical problems affected data collection for two GPS-Argos collars and three GPS-SOB collars (Appendix 1). Problems were one broken plastic battery case and one broken-off Argos antenna for the GPS-Argos collars and two broken off GPS antennas with integrated flash drive (containing the GPS data) and one premature loss of a collar due to breakage of the leather belt in the GPS-SOB collars (Appendix 1).
Other mechanical problems did not affect data collection during 12-19 months, but pointed to weaknesses making them unsuitable for deployment over longer periods. Although we only had strong evidence that the breakage of the external Argos antenna compromised final success in one collar, there was additional evidence that external whip antennas were prone to breakage in wild equids and wild Bactrian camels. In four out of the five retrieved NorthStar GPS-Argos collars the external VHF antennas had broken close to the base. In one Telonics GPS-Argos collar with the new external Argos antenna protruding perpendicular on top of the collar, the antenna showed heavy wear and would likely have broken off completely in time.
A plastic battery case seemed more prone to destruction by wild equids than battery cases of metal, metal embedded in a high-density polymer, or a combination of metal and plastic. Although only one plastic battery case compromised final success, of the 8 GPS-Argos collars with plastic battery cases, one showed a hairline crack and two others broke shortly after the expected lifespan of the collar (faulty drop-offs failed to release these units in time, but Przewalski’s horses were observed with broken units).
The double-layered butyl belt and the double layered leather belt seemed unsuitable for long-term deployment on wild equids or wild camels. All collars placed on these large bodied Gobi herbivores showed moderate to heavy wear after 12-19 months. The stitches along the rim of the collars detached causing the two layers to separate, revealing the internal connection cables and antennas. In addition, the leather belt of one GPS-SOB collar on an Asiatic wild ass was ripped open shortly before the pre-programmed drop-off time. On the other hand, collars retrieved from two wolves and four Mongolian gazelles showed little wear. The fact that several collars on Mongolian gazelles worked for >24 months, further suggests that wear is not a big concern for this species.
Unknown Problems
Twenty-one collars stopped working prematurely for unknown reasons. Besides technical problems, illegal killing and the subsequent destruction of the collar by people is a possible explanation. We have strong indications for illegal killings of two wild asses (one collar found cut open by a knife, one collar stopped after three weeks and at the last location we later found the remains of multiple poached animals) and attempted illegal killing for another wild ass (crater from a grain of shot in the metal battery case). In addition, one Przewalski’s horse was illegally captured and the collar was removed and destroyed (the horse was soon released and returned to the Great Gobi B SPA). Although we can explicitly exclude poaching and subsequent destruction of the collar only for three Przewalski’s horses (all seen alive after collar failures), it seems unlikely that all of the remaining 9 gazelles and 9 wild asses have fallen victim to illegal killings. This places the number of technical failures for unknown reasons somewhere between three and 21.
Drop-Offs
Drop-offs were essential for collar retrieval, which allowed for collar evaluation and access to additional GPS data stored on board in the GPS-Argos collars. Out of 8 drop-offs from Lotek, four did not open either using the VHF link or via the pre-programmed end time, and one opened prematurely upon the removal of the magnet during mounting. Of the 44 drop-offs from Telonics, only one opened prematurely for unknown reasons, and one opened prematurely due to mechanical damage likely caused by fighting between wild ass stallions. Several collars were removed before the pre-programmed drop-off time or were lost due to premature collar failure. All 21 collars with Telonic drop-offs which we were able to monitor until the programmed drop-off date opened as expected.
Costs Associated with Collar Failures
Due to collar retrieval and close monitoring of collar performance we were able to document several collar failures that fell under the producer’s warrantee regulations: human error on the producer side, mechanical, and software problems. Since 2001 we have received 19 new collars as compensation and several units were refurbished for free or at a low cost. In addition, all faulty drop-offs were reimbursed with new units.
However, poor Argos performance (affecting either locating the animals or transferring GPS data via the Argos satellite system) was the single most important collar problem, but did not unambiguously fall under any warrantee regulations. Other substantial costs associated with faulty or malfunctioning collars not compensated for were: a) import taxes for replacement units (20% of value or ~500 EURO), b) pre-paid Argos costs for a certain number of units per year until 2004 (~9 EURO per transmission day and collar plus a monthly activation fee of ~3 EURO per collar1), c) salary (≥1 person month senior researcher, ≥ 1 person month field assistant) d) travel costs to (~3,000 EURO for a roundtrip by 2 people from Europe) and in Mongolia to search for faulty collars and find replacement animals (~2,000-3,000 EURO each trip) and e) costs of the actual capture (~500 US$ per animal). Important non-monetary costs were loss of time, data and reputation (e.g. as a consequence of faulty collars, our capture permit for wild camels was not renewed by the Mongolian Ministry of Nature and Environment).
Discussion
Given the remoteness of the study areas, the extreme climate and the lack of suitable aircrafts for aerial telemetry, we chose satellite telemetry to answer questions related to space- and habitat use of wildlife in the Gobi and Eastern Steppe. Due to multiple technical failures, the amount of locational information was lower, and the costs much higher, than we originally budgeted. Despite the problems we encountered, we obtained unique data of high relevance for conservation and management (e.g., [30,36,37,38,39,40]).
Major setbacks were caused by the greatly reduced Argos transmission performance since the end of 2005 / beginning of 2006. The problem was simultaneously noted in Europe and seems to be the result of a unidentified broadband noise with significant amplitude covering the total Argos frequency range [41,42,43; B. Woodward pers. comm. 2006]. Only after an accumulation of failures of various collars in Central Asia and the collaborative networking by the individual research groups was the Argos problem in Central Asia officially acknowledged and discussed by collar producers and CLS America [42,44]. Changes in antenna design and increased output power only provided marginal or short-term improvement of Argos transmission success for collars deployed on wild asses and wild Bactrian camels. To date, this problem has not yet been resolved [45]. The better performance of Argos only collars on Mongolian gazelles and of collars not attached to an animal suggest that a large body mass reduces the Argos signal below a critical threshold. Consequently, we presently would not recommend the use of collars depending on an Argos unit for data collection or access on large bodied ungulates in central Asia.
Technical advances in wildlife tracking have been tremendous over the past 20 years. Very specific demands from wildlife professionals (light weight, long lasting, and animal friendly transmitters), tight research budgets, and the often abusive treatment of collars by study animals pose a challenge for any manufacturer. Tests of new tag designs or configurations are difficult to perform as the outcome may vary significantly depending on the study area. For example, in North America Argos performs reliably, whereas in Europe and central Asia performance is poor [41,42,43,45]. For a reliable assessment of a new collar configuration, deployment of a larger number of units (>10), on different species, in different environments, and over an extended period (>1 year or all seasons) would be necessary. However, with the limited market of wildlife professionals this is unrealistic for emerging products on the producer’s side, and for rare species in remote environments on the user’s side. Our experiences show that all components of newly emerging satellite telemetry systems are prone to error. Often small modifications can have a large effect on the animal [46], the overall stability, or data transmission. A well-meaning small change in the design can have unexpected side effects. We believe for example that the premature cessations of Argos transmissions in the later batch of Telonics Argos only collars were likely caused by the breakage of the new external Argos antenna protruding on top of the collar.
With the electronics becoming more flexible and customized data collection and transmission schedules, the risk for human-caused failures increases – both on the producer and user side. Ideally, all new units should be tested in the study area on domestic animals of similar size and behaviour as the study species for at least a month prior to deployment. Our own tests (Kaczensky unpubl. data) and previous studies (e.g., [47]) showed that testing collars not attached to animals may yield overly optimistic results. Once on the study species, remotely received data should be carefully monitored in respect to success rate. A good documentation of tests before deployment and continuous monitoring of performance while on the study species will also facilitate warranty negotiations with the manufacturer in the case of failures or malfunctions. However, malfunctions are difficult to prove and often require the retrieval of at least some of the faulty units. In our case pre-programmable drop-offs proved valuable to retrieve faulty units to make warranty claims and access data which had not been transferred via the Argos uplink.
In most cases, only the faulty units are replaced, leaving the researcher or manager to cover the costs for the original deployment, the retrieval of the units, the redeployment of the new collars and all other associated costs. However, often the non-monetary costs are even harder to bear: lost or insufficient data, loss of time, and loss of credibility. Even if replacement units are provided, they are largely useless when the research project has expired or capture permits were withdrawn as a consequence of previous collar failures.
Newly emerging wildlife tracking devices claim to be promising tools for the advancement of wildlife research and management [5]. However, managers and researchers need to be aware that if they use these new devices, they are basically also performing a field test of equipment. Consequently, success cannot be taken for granted and the logistic burden and final costs are subject to a certain degree of uncertainty. Although it is arguable that researchers could take this into account by marking a greater number of animals, tight research budgets, the high conservation value of individuals of a threatened species, and animal welfare issues do not easily allow for increased sample sizes beyond the absolute minimum. In addition, many conservation projects on rare species in remote areas receive staggered funding – they have to start small and if successful may receive further funds. Furthermore, in a management context information on a specific individual is often requested (e.g. a nuisance animal or a re-introduced animal). Due to the small sample sizes and the focus on single individuals, collar failures in such projects are a particularly hard blow.
Rapid informal exchange of both positive and negative experiences could greatly enhance the test phase of new products - similar to beta-testing of software. This exchange of information would quickly and effectively detect weak points in tag configuration or design and could help save costs and frustrations for the users and manufacturers. We therefore recommend the development of a web-based platform, e.g. like the yahoo group camera trap site (http://uk.groups.yahoo.com/group/cameratraps/), where users and producers of telemetry products could quickly post and exchange their experiences. The definitions and criteria presented in this manuscript could be a possible starting point for a standardized evaluation of tag performance.
Supplementary Material
Appendix 1: List of all 104 individual collars and their evaluation.
Acknowledgments
This research was conducted within the framework of the Przewalski’s horse re-introduction project of the International Takhi Group, in cooperation with the Mongolian Ministry of Nature and Environment and the National University of Mongolia. Funding was provided by the Austrian Science Foundation (FWF project P14992 & P18624), the World Bank’s Netherlands-Mongolia Trust Fund for Environmental Reform, and the United Nation Development Programme’s Conservation of the Great Gobi Ecosystem and Its Umbrella Species project. The research on Asiatic wild ass in SE Gobi and Mongolian gazelle was supported by the Ministry of Education, Culture, Sports, Science and Technology, Japan, Grant-in-Aid for Scientific Research (B) 14405039, (A) 18255002, 21st century COE Program, and Global COE Program. We thank D. Lkhagvasuren, N. Enkhsaikhaan, O. Ganbaatar, B. Mijiddorj, B. Lhagvasuren, Y. Adiya, D. Enkhbileg, G. Dorvchindorj, Y. Nyambayar, B. Buuveibaatar, B. Chimeddorj, L. Banzagch, G. Sukhchuluun, D. Enkhbujin, and E. Sos for help with collar deployment and testing. T. Whitten, H. Reynolds, M. Proctor, J. Ross, and R. Reading helped with collar import to Mongolia or collar retrieval from the Gobi. R. Hayes, J. Linnell and several anonymous referees provided valuable comments and corrections on the manuscript. The Norwegian Institute for Nature Research (NINA) in Norway provided office space during submission phase.
Footnotes
Until 2004 Argos use was calculated by country and had to be pre-paid at the beginning of the year. A lower use was not reimbursed, whereas for any use above the calculated use extra fees had to be paid. Since 2005, costs have become globally consistent and are based exclusively on actual use.
References
Five “key references”, selected by the authors, are marked below (Three recommended (●) and two highly recommended (●●) papers).
- 1.Cochran WW, Lord RD., Jr A radio tracking system for wild animals. Journal of Wildlife Management. 1963;27:9–24. DOI:10.2307/3797775. [Google Scholar]
- 2.White GC, Garrott RA. Analysis of Wildlife Radio-Tracking Data. San Diego, USA; Academic Press, Inc.: 1990. [Google Scholar]
- 3.Priede IG, Swift SM. Wildlife Telemetry Remote Monitoring and Tracking of Animals. Ellis Horwood; New York, USA: 1992. [Google Scholar]
- 4.Samuel MD, Fuller MR. Wildlife radiotelemetry. In: Bookout TA, T.A., editors. Research and management techniques for wildlife and habitats. The Wildlife Society; Bethesda, Maryland, USA: 1996. pp. 370–418. [Google Scholar]
- 5.Mech LD, Barber SM. A critique of wildlife radio-tracking and its use in national parks: a report to the U.S. National Park Service. U.S. Geological Survey, Northern Prairie Wildlife Research Center, Jamestown, N.D. Northern Prairie Wildlife Research Center; Jamestown, ND: [cited January 2010]. 2002. Online. Available via http://www.npwrc.usgs.gov/resource/wildlife/radiotrk/index.htm. [Google Scholar]
- 6.Taylor MK. The effect of radio transmitter harnesses on free-ranging polar bears. International Conference on Bear Research and Management. 1986;6:219–221. [Google Scholar]; 3 Lowe S, Browne M, Boudjelas S, De Poorter M. 100 of the World’s Worst Invasive Alien Species. A Selection from the Global Invasive Species Database. The Invasive Species Specialist Group (SSC), IUCN; Gland, Switzerland: 2000. [Google Scholar]
- 7.Fancy SG, Pank LF, Douglas DC, Curby CH, Garner GW, Amstrup SC, Regelin WL. Satellite telemetry: a new tool for wildlife research and management. U.S. Fish and Wildlife Service; Washington, D.C., USA: 1988. Resource Publication No. 172. [Google Scholar]
- 8.Hays GC, Akesson S, Godley BJ, Luschi P, Santidrian P. The implication of location accuracy for the interpretation of satellite-tracking data. Animal Behaviour. 2001;61:1035–1040. DOI:10.1006/anbe.2001.1685. [Google Scholar]
- 9.Keating KA, Brewster WG, Key CH. Satellite telemetry: performance of animal-tracking systems. Journal of Wildlife Management. 1991;55:160–171. DOI:10.2307/3809254. [Google Scholar]
- 10.Ancel A, Gendner JP, Lignon J, Jouventin P, Le Maho Y. Satellite radio- tracking of emperor penguins walking on sea-ice to refeed at sea. In: Priede IG, Swift SM, editors. Wildlife Telemetry Remote Monitoring and Tracking of Animals. Ellis Horwood; New York, USA: 1992. pp. 201–202. [Google Scholar]
- 11.Rodgers AR. Tracking animals with GPS: the first 10 years. Tracking Animals with GPS; Proceedings of an international conference held at the Macaulay Land Use Research Institute from 12-13 March 2001; Aberdeen, SD, USA. 2001. pp. 1–10. [Google Scholar]
- 12.Tomkiewicz S. GPS Application for Wildlife – A Review. Telonics Quarterly. 1996 Spring & Summer9(1) [Google Scholar]
- 13.Jay CV, Garner GW. Performance of a satellite-linked GPS on Pacific walruses (Odobenus rosmarus divergens) Polar Biology. 2002;25:235–237. [Google Scholar]
- 14.Schwartz CC, Arthur SM. Radiotracking Large Wilderness Mammals: Integration of GPS and Argos Technology. Ursus. 1999;11:261–274. [Google Scholar]
- 15.Thomas B, Holland JD, Minot EO. Elephant (Loxodonta africana) home ranges in Sabi Sand Reserve and Kruger National Park: A five year-year satellite tracking study. PLOS One. 2008;3(12):e3902. doi: 10.1371/journal.pone.0003902. DOI:10.1371/journal.pone.0003902. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 16.Rahimi S, Owen-Smith N. Movement patterns of sable antelope in the Kruger National Park from GPS/GSM collars: a preliminary assessment. South African Journal of Wildlife Research. 2007;37:143–151. DOI:10.3957/0379-4369-37.2.143. [Google Scholar]
- 17.Brugnoli A, Alberti M, Rocca M. Linx individual B132 from north-eastern Switzerland sighted in Trentino (northern Italy) Forest. 2008;5:269–272. DOI:10.3832/efor0545-0050269. [Google Scholar]
- 18.Britten MW, Kennedy PL, Ambrose S. Performance and accuracy evaluation of small satellite transmitters. Journal of Wildlife Management. 1999;63:1349–1358. [Google Scholar]
- 19 ●●.Dubinin M, Lushchekina A, Radeloff VC. Performance and accuracy of Argos transmitters for wildlife monitoring in Southern Russia. European Journal of Wildlife Research. 2010;56:459–463. DOI:10.1007/s10344-009-0354-4. [Google Scholar]
- 20 ●.Hansen MC, Riggs RA. Accuracy, precision, and observation rates of global positioning system telemetry collars. Journal of Wildlife Management. 2008;72:518–526. DOI:10.2193/2006-493. [Google Scholar]
- 21.Swain DL, Wark T, Bishop-Hurley GJ. Using high fix rate GPS data to determine the relationships between fix rate, prediction errors and patch selection. Ecological Modelling. 2008;212:273–279. DOI:10.1016/j.ecolmodel.2007.10.027. [Google Scholar]
- 22.Sager-Fradkin KA, Jenkins KJ, Hoffman RA, Happe PJ, Beecham JJ, Wreight RG. Fix success and accuracy of global positioning system collars in old-growth temperate coniferous forests. Journal of Wildlife Management. 2007;71:1298–1308. DOI:10.2193/2006-367. [Google Scholar]
- 23.Cain JW, Krausman PR, Jansen BD, Morgart JR. Influence of topography and GPS fix interval on GPS collar performance. Wildlife Society Bulletin. 2005;33:926–934. DOI:10.2193/0091-7648(2005)33[926:IOTAGF]2.0.CO;2. [Google Scholar]
- 24.D’Eon RG, Delparte D. Effects of radio-collar position and orientation on GPS radio-collar performance, and the implications of PDOP in data screening. Journal of Applied Ecology. 2005;42:383–388. DOI:10.1111/j.1365-2664.2005.01010.x. [Google Scholar]
- 25.Frair JL, Nielsen SE, Merrill EH, Lele SR, Boyce MS, Munro RHM, Stenhouse GB, Beyer HL. Removing GPS collar bias in habitat selection studies. Journal of Applied Ecology. 2004;4:201–212. DOI:10.1111/j.0021-8901.2004.00902.x. [Google Scholar]
- 26 ●●.Johnson CJ, Heard DC, Parker KL. Expectations and realities of GPS animal location collars: results of 3 years in the field. Wildlife Biology. 2002;8:153–159. [Google Scholar]
- 27.von Wehrden H, Wesche K. Relationships between climate, productivity and vegetation in southern Mongolian drylands. Basic and Applied Dryland Research. 2007;1:100–120. doi: 10.1127/badr/1/2007/100. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 28.Hilbig W. The vegetation of Mongolia. SPB Academic Publishing; Amsterdam, Netherlands and New York, USA: 1995. [Google Scholar]
- 29.Clark EL, Munkhbat J, Dulamtseren S, Baillie JEM, Batsaikhan N, Samiya R, Stubbe M. Mongolian Red List of Mammals. Zoological Society of London; London, UK: 2006. (Regional Red List Series Vol. 1). [Google Scholar]
- 30.Ito TY, Miura N, Lhagvasuren B, Enkhbileg D, Takasuki S, Tsunekawa A, Jiang Z. Satellite tracking of Mongolian gazelles (Procapra gutorosa) and habitat shifts in their seasonal ranges. Journal of Zoology. 2006;269:291–298. DOI:10.1111/j.1469-7998.2006.00077.x. [Google Scholar]
- 31.Walzer C, Kaczensky P, Ganbataar O, Lengger J, Enkhsaikhan N, Lkhagvasuren D. Capture and anaesthesia of wild Mongolian equids - the Przewalski’s horse (Equus ferrus przewalskii) and the Khulan (E. hemionus) Mongolian Journal of Biological Sciences. 2006a;4:19–28. [Google Scholar]
- 32.Walzer C, Kaczensky P, Enkhbileg D, Adiya Y, Khatanbaatar I, Dorvchindorj G. Capture and Anaesthesia of wild Bactrian camels - working in a freezer. European Association of Zoo and Wildlife Veterinarians; 2006b. pp. 61–65. [Google Scholar]
- 33.Walzer C. Non domestic equids. In: West G, Heard D, Caulkett N, editors. Zoo Animal and Wildlife Immobilization and Anaesthesia. Blackwell Publishing; Ames, Iowa, USA: 2007. pp. 523–531. DOI:10.1002/9780470376478.ch46. [Google Scholar]
- 34.Kaczensky P, Enkhsaikhan N, Ganbaatar O, Walzer C. Identification of herder-wild equid conflicts in the Great Gobi B Strictly Protected Area in SW Mongolia. Exploration into the Biological Resources of Mongolia. 2007;10:99–116. [Google Scholar]
- 35.Walzer C, Kaczensky P. [cited July 2010];Wild camel training and collaring mission for the Great Gobi A Strictly Protected Area in Mongolia. Final report for UNDP “Conservation of the Great Gobi Ecosystem and Its Umbrella Species” Project. 2006 Available via http://www.savethewildhorse.org/files/Downloads/PDF/Studien/2005_12_22_report_camel_collaring[1].pdf.
- 36.Ito TY, Mura N, Lhagvasuren B, Enkhbileg D, Takasuki S, Tsunekawa A, Jiang Z. Preliminary evidence of a barrier effect of a railroad on the migration of Mongolian gazelles. Conservation Biology. 2005;19:945–948. DOI:10.1111/j.1523-1739.2005.004364.x. [Google Scholar]
- 37.Kaczensky P, Sheehy DP, Johnson DE, Walzer C, Lhkagvasuren D, Sheehy CM. Room to roam? The threat to khulan (Wild Ass) from human intrusion. World Bank; Washington, D.C.: 2006. Mongolia Discussion Papers, East Asia and Pacific Environment and Social Development Departure. [Google Scholar]
- 38.Kaczensky P, Enkhsaikhan N, Ganbaatar O, Walzer C. The Great Gobi B Strictly Protected Area in Mongolia - refuge or sink for wolves Canis lupus in the Gobi? Wildlife Biology. 2008a;14:444–456. DOI:10.2981/0909-6396-14.4.444. [Google Scholar]
- 39.Kaczensky P, Ganbaatar O, von Wehrden H, Walzer C. Resource selection by sympatric wild equids in the Mongolian Gobi. Journal of Applied Ecology. 2008b;45:1762–1769. DOI:10.1111/j.1365-2664.2008.01565.x. [Google Scholar]
- 40.Kaczensky P, Kuehn R, Lhagvasuren B, Pietsch S, Yang W, Walzer C. Connectivity of the Asiatic wild ass population in the Mongolian Gobi. Biological Conservation. 2011 doi: 10.1016/j.biocon.2010.12.013. In press. DOI:10.1016/j.biocon.2010.12.013. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 41.Microwave Telemetry, Inc. [cited March 2010 cited January 2011];Argos performance in Europe part I. Tracker News. 2005 Winter; 2005. Available via http://www.microwavetelemetry.com/newsletters/winter_05page8.pdf.
- 42 ●.Gros P, Malarde JP, Woodward B. [cited March 2010];Argos performance in Europe part II. Microwave Telemetry Inc. Tracker News. 2006 Spring; 2006. Available via http://microwavetelemetry.com/newsletters/spring_06page8.pdf.
- 43.Soutullo A, Cadahia L, Urios V, Ferrer M, Negro JJ. Accuracy of lightweight satellite telemetry: a case study in the Iberian Peninsula. Journal of Wildlife Management. 2007;71:1010–1015. DOI:10.2193/2006-042. [Google Scholar]
- 44.McCarthy T. [cited January 2011];Snow Leopard Update from Dr. Tom McCarthy: Radio noise hampers satellite-based study of snow leopards in Asia. Asia-Pacific Regional Space Agency Forum (APRSAF) feature. 2006 Available via http://www.aprsaf.org/interviews_features/features_2007/feature_19.php.
- 45.Microwave [cited March 2010];Updates. Tracker News. 2007 Winter; 2007. Available via http://www.microwavetelemetry.com/newsletters/winter07page6.pdf.
- 46.Krausman PR, Bleich FC, Cain JW, Stephenson TR, DeYoung DW, McGrath PW, Swift PK, Pierce BM, Jansen BD. From the Field: Neck lesions in ungulates from collars incorporating satellite technology. Wildlife Society Bulletin. 2004;32:987–991. DOI:10.2193/0091-7648(2004)032[0987:FTFNLI]2.0.CO;2. [Google Scholar]
- 47 ●.Zweifel-Schielly B, Suter W. Performance of GPS telemetry collars for red deer Cervus elaphus in rugged Alpine terrain under controlled and free-living conditions. Wildlife Biology. 2007;13:299–312. DOI:10.2981/0909-6396(2007)13[299:POGTCF]2.0.CO;2. [Google Scholar]
Associated Data
This section collects any data citations, data availability statements, or supplementary materials included in this article.
Supplementary Materials
Appendix 1: List of all 104 individual collars and their evaluation.