

Abstract
Aims and Purpose
To demonstrate a quick way of calculating the optical difference between two refractions using vector analysis, and to express this as a score for examination purposes.
Methods
An existing formula is applied, converted to a defocus equivalent, and then converted to a score. The formula is set out in an Excel spreadsheet.
Results
The spreadsheet enabled rapid assessment of the difference between two refractive errors. Examples are demonstrated.
Conclusion
The spreadsheet was successful in enabling a comparison of any two refractions, expressing the difference either as a correcting (third) refraction, a defocus equivalent or a one-figure score.
Keywords: vector analysis, refraction, spherocylinder
Introduction
We wished to assign an error score to the candidates who were taking their examination in refraction, based on the refraction they prescribed compared with the correct refraction. We wanted a quick and easy way to enter data and produce error scores in a busy exam setting.
Before we settled on the method devised and outlined below, the following problems had to be overcome. First, two different refractions could have the same spherical equivalent. Second, if marks were to be awarded for correct cylinder power and axis, difficulty would be encountered if one of the refractions were a sphere. Lastly, there would be a difficulty if the marking scheme was influenced by positive and negative cylinder format.
Methods
Vector analysis was used to calculate a correcting refraction, which converts the incorrect refraction to the correct one. These calculations have previously been published by Retzlaff et al.1
The correcting refraction then required conversion to a score. We decided to use a second formula, published by Holladay,2 to calculate the defocus equivalent. This would give an error value in dioptres. This method was chosen as the value (in dioptres) has been shown to correlate with loss of uncorrected visual acuity, resultant from the induced refractive error.
The resultant error in dioptres can be converted to a mark. The mark would depend on the total number of marks available for that question and would, therefore, vary between questions.
Lastly, the process for generating marks had to be in a format that could be used rapidly. This was carried out using an Excel spreadsheet, which reproduced the calculations for every candidate at each station. The result for an average sitting of the examination would be a spreadsheet with ∼500 rows, one row per candidate-refraction.
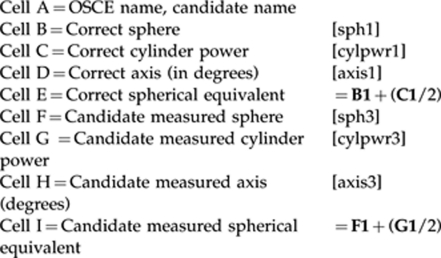
A spreadsheet was set up with cells available for the correct refraction for each question (as written by the examiner) and the candidates' measured refractions. Of interest was the spherical equivalent of each, which was calculated for comparison. In the examples given the cells are designated to row 1, and are shown in bold.
The axis (in degrees) was converted to radians, which is required for the formula:

At this point the spreadsheet applies step 1–4 of the formula as outlined by Retzlaff et al1 for subtracting spherocylinders:
sph3/cylpwr3 × axis3−sph1/cylpwr1 × axis1=sph2/cylpwr2 × axis2
Step 1: finds the vectors of the cylinders of the two known refractions.

Step 2: determines the axis of the new refraction (in radians).
Cell Q: IF M=O, Cell Q reads for Cell L (ie, 0 degrees in radians)
Otherwise: (arctan[(Y3−Y1)/(X3−X1)])/2 =IF(M1=O1,L1, (ATAN((P1−N1)/(O1−M1)))/2)
Step 2 needs to exclude the possibility of X3=X1, because if so, the fraction fails as the denominator is zero. Therefore, if this event occurs, the formula for Cell Q expresses Cell L first. This only happens when the cylinder and power are identical—making the correcting refraction a sphere. The axis of a cylinder of no power is irrelevant; however, we have to put in a figure, so we used the axis zero.
Cell R: Expresses Cell Q in degrees (this may be a negative number)
=DEGREES(Q1)
Cell W: is used to eliminate a negative number in cell R
=IF(R1<0,R1+180,R1)
Step 3: determines the cylinder power of the correcting refraction, in dioptres.
Cell S: cylpwr2=[cylpwr3 × (cos(2 × (axis3−axis2)))]−[cylpwr1 × (cos(2 × (axis1−axis2)))]
=(G1*(COS(2*(K1−Q1))))−(C1*(COS(2*(J1−Q1))))
Step 4: determines the resultant sphere power of the correcting refraction, in dioptres.
Cell T: sph2=sph3−sph1−0.5 × (cylpwr1+cylpwr2−cylpwr3)
=F1−B1−(0.5*(C1+S1−G1))
At this point the four steps as outlined by Retzlaff1 have calculated a new correcting refraction from the candidate's one to the correct one. For convenience this is realigned in a more conventional way:
Cell U=Cell T
Cell V=Cell S
Cell W=IF(R1<0,R1+180,R1) (as already explained)
Step 5: calculates the defocus equivalent as published by Holladay.2
Cell X: calculates the Spherical Equivalent of the correcting refraction
=U1+(V1/2)
Cell Y: converts the spherical equivalent of the correcting refraction to a positive number if it is negative
=SQRT(X1*X1)
Cell Z: converts the calculated cylindrical error to a positive number if it is negative
=SQRT(V1*V1)
Cell AA: calculates the defocus equivalent
=(Y1+Z1/2)
This now produces one figure—the defocus equivalent (DFE)—which represents the error between the two refractions, in dioptres. This is now used to calculate a mark, which could vary depending on the question, the total marks available and how accurate you are expecting the refraction to be. Below is one example marked out of 12.
Step 6:
CellAB: converts the defocus equivalent into a mark
=IF(AA1<=0.25,12,IF(AA1<0.51,11,+IF(AA1<0.76,10,+IF(AA1<1.01,9,+IF(AA1<1.12,8,+IF(AA1<1.25,7,+IF(AA1<1.5,6,+IF(AA1<1.75,5,+IF(AA1<2,4,+IF(AA1<2.5,3,+IF(AA1<3,2,+IF(AA1<4,1,+IF(AA1>=4,0)))))))))))))
Note Excel versions 2003 and earlier may not support greater than six +IF logical tests.
Results
We present several examples that were problematic using any other system. Table 1 shows different refractions with the same spherical equivalent. In the first four rows, the candidate has chosen to use a positive cylinder, and in the second four rows a negative cylinder is used. As can be observed, the results are not different when refractions are written in different formats.
Table 1. Different refractions with the same spherical equivalent; positive and negative cylinder format.
| B | C | D | E | F | G | H | I | U | V | W | AA | AB |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Sph1 | Cylpwr1 | Axis1 | SE1 | Sph3 | Cylpwr3 | Axis3 | SE3 | Sph2 | Cylpwr2 | Axis2 | DFE | Mark/12 |
| −0.50 | 1.00 | 90 | 0.00 | −1.00 | 2.00 | 90 | 0.00 | 0.50 | −1.00 | 180 | 0.50 | 9 |
| −1.00 | 2.00 | 90 | 0.00 | −2.00 | 4.00 | 90 | 0.00 | 1.00 | −2.00 | 180 | 1.00 | 7 |
| −2.00 | 4.00 | 90 | 0.00 | −3.00 | 6.00 | 90 | 0.00 | 1.00 | −2.00 | 180 | 1.00 | 7 |
| −1.00 | 2.00 | 90 | 0.00 | −1.00 | 2.00 | 180 | 0.00 | −2.00 | 4.00 | 180 | 2.00 | 3 |
| −0.50 | 1.00 | 90 | 0.00 | 1.00 | −2.00 | 180 | 0.00 | 0.50 | −1.00 | 180 | 0.50 | 9 |
| −1.00 | 2.00 | 90 | 0.00 | 2.00 | −4.00 | 180 | 0.00 | 1.00 | −2.00 | 180 | 1.00 | 7 |
| −2.00 | 4.00 | 90 | 0.00 | 3.00 | −6.00 | 180 | 0.00 | 1.00 | −2.00 | 180 | 1.00 | 7 |
| −1.00 | 2.00 | 90 | 0.00 | 1.00 | −2.00 | 90 | 0.00 | −2.00 | 4.00 | 180 | 2.00 | 3 |
Table 2 addresses the problem encountered when one refraction is a sphere and the other has a cylinder.
Table 2. One refraction is a sphere and the other has a cylinder.
| B | C | D | E | F | G | H | I | U | V | W | AA | AB |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Sph1 | Cylpwr1 | Axis1 | SE1 | Sph3 | Cylpwr3 | Axis3 | SE3 | Sph2 | Cylpwr2 | Axis2 | DFE | Mark/12 |
| −1.00 | 2.00 | 90 | 0.00 | −1.00 | 0.00 | 0 | −1.00 | −2.00 | 2.00 | 180 | 2.00 | 3 |
| −1.00 | 0.50 | 90 | −0.75 | −1.00 | 0.00 | 0 | −1.00 | −0.50 | 0.50 | 180 | 0.50 | 9 |
| −1.00 | 0.00 | 0 | −1.00 | −1.00 | 2.00 | 90 | 0.00 | 2.00 | −2.00 | 180 | 2.00 | 3 |
In Table 3, if the cylinder axis alone is incorrect, sensible marks are generated relative to cylinder power.
Table 3. Incorrect cylinder axis.
| B | C | D | E | F | G | H | I | U | V | W | AA | AB |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Sph1 | Cylpwr1 | Axis1 | SE1 | Sph3 | Cylpwr3 | Axis3 | SE3 | Sph2 | Cylpwr2 | Axis2 | DFE | Mark/12 |
| 2.00 | 0.50 | 90 | 2.25 | 2.00 | 0.50 | 85 | 2.25 | −0.04 | 0.09 | 43 | 0.0435 | 11 |
| 2.00 | 0.50 | 90 | 2.25 | 2.00 | 0.50 | 45 | 2.25 | −0.35 | 0.71 | 23 | 0.3535 | 10 |
| 2.00 | 0.50 | 90 | 2.25 | 2.00 | 0.50 | 180 | 2.25 | −0.50 | 1.00 | 180 | 0.50 | 9 |
| 2.00 | 1.00 | 90 | 2.50 | 2.00 | 1.00 | 85 | 2.50 | −0.09 | 0.17 | 43 | 0.0871 | 11 |
| 2.00 | 1.00 | 90 | 2.50 | 2.00 | 1.00 | 45 | 2.50 | −0.71 | 1.41 | 23 | 0.7071 | 9 |
| 2.00 | 1.00 | 90 | 2.50 | 2.00 | 1.00 | 180 | 2.50 | −1.00 | 2.00 | 180 | 1.00 | 7 |
| 2.00 | 3.00 | 90 | 3.50 | 2.00 | 3.00 | 85 | 3.50 | −0.26 | 0.52 | 43 | 0.2614 | 10 |
| 2.00 | 3.00 | 90 | 3.50 | 2.00 | 3.00 | 45 | 3.50 | −2.12 | 4.24 | 23 | 2.1213 | 3 |
| 2.00 | 3.00 | 90 | 3.50 | 2.00 | 3.00 | 180 | 3.50 | −3.00 | 6.00 | 180 | 3.00 | 1 |
In Table 4, if the power of the cylinder and axis require no change, only the spherical change is calculated and marked accordingly.
Table 4. Incorrect sphere but correct cylinder and axis.
| B | C | D | E | F | G | H | I | U | V | W | AA | AB |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Sph1 | Cylpwr1 | Axis1 | SE1 | Sph3 | Cylpwr3 | Axis3 | SE3 | Sph2 | Cylpwr2 | Axis2 | DFE | Mark/12 |
| −1.00 | 2.00 | 45 | 0.00 | −3.00 | 2.00 | 45 | −2.00 | −2.00 | 0.00 | 0 | 2.00 | 3 |
| −1.00 | 2.00 | 45 | 0.00 | −1.00 | −2.00 | 135 | −2.00 | −2.00 | 0.00 | 0 | 2.00 | 3 |
Finally, Table 5 shows that the equation is stable over a wide range of mixed astigmatism.
Table 5. A wide range of mixed astigmatism.
| B | C | D | E | F | G | H | I | U | V | W | AA | AB |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Sph1 | Cylpwr1 | Axis1 | SE1 | Sph3 | Cylpwr3 | Axis3 | SE3 | Sph2 | Cylpwr2 | Axis2 | DFE | Mark/12 |
| 2.00 | −7.00 | 90 | −1.50 | 2.00 | −6.00 | 90 | −1.00 | 1.00 | −1.00 | 180 | 1.00 | 7 |
| 2.00 | −6.00 | 90 | −1.00 | 2.00 | −5.00 | 90 | −0.50 | 1.00 | −1.00 | 180 | 1.00 | 7 |
| 2.00 | −5.00 | 90 | −0.50 | 2.00 | −4.00 | 90 | 0.00 | 1.00 | −1.00 | 180 | 1.00 | 7 |
| 2.00 | −4.00 | 90 | 0.00 | 2.00 | −3.00 | 90 | 0.50 | 1.00 | −1.00 | 180 | 1.00 | 7 |
| 2.00 | −3.00 | 90 | 0.50 | 2.00 | −2.00 | 90 | 1.00 | 1.00 | −1.00 | 180 | 1.00 | 7 |
| 2.00 | −2.00 | 90 | 1.00 | 2.00 | −1.00 | 90 | 1.50 | 1.00 | −1.00 | 180 | 1.00 | 7 |
| 2.00 | −1.00 | 90 | 1.50 | 2.00 | 0.00 | 90 | 2.00 | 1.00 | −1.00 | 180 | 1.00 | 7 |
| 2.00 | 0.00 | 90 | 2.00 | 2.00 | 1.00 | 90 | 2.50 | 1.00 | −1.00 | 180 | 1.00 | 7 |
| 2.00 | 1.00 | 90 | 2.50 | 2.00 | 2.00 | 90 | 3.00 | 1.00 | −1.00 | 180 | 1.00 | 7 |
Discussion
This spreadsheet application has enabled the rapid assessment of the error between two refractions. This has been used already in the Refraction Certificate examination for the FRCOphth to calculate error between two refractive errors, allowing this to be carried out in real time during the exam sitting.
This method will have other uses for studying the induced refractive error following surgical procedures such as cataract surgery, corneal suture placement or removal and astigmatic corneal surgery.
Notes
The equation used to generate a mark is used for illustration purposes only and does not represent any equation currently in use.
The authors declare no conflict of interest.
References
- Retzlaff J, Paden PY, Ferrell L. Vector analysis of astigmatism. J Cat Ref Surg. 1993;19:393–398. doi: 10.1016/s0886-3350(13)80312-4. [DOI] [PubMed] [Google Scholar]
- Holladay JT, Lynn MJ, Waring GO, III, Gemmill M, Keehn G, Fielding B. The relationship of visual acuity, refractive error, and pupil size after radial keratotomy. Arch Ophthalmol. 1991;109:70–77. doi: 10.1001/archopht.1991.01080010072036. [DOI] [PubMed] [Google Scholar]