

Abstract
BACKGROUND:
Stability is often described to be static (quiet standing) and dynamic (maintaining a stable position while undertake a prescribed movement). Many researchers have used only static tests to evaluate the stability of normal and handicapped subjects. However, it is important to evaluate the stability of subjects while undertaking various tasks (dynamic stability). It is not currently clear whether static balance can predict dynamic balance or not. Therefore, the aim of this research was to investigate the relationship between parameters of static and dynamic stability tests.
METHODS:
The current clinical trial study was carried out in the Bioengineering Unit of Strathclyde University during 2008 and 2009. The normal subjects with no history of musculoskeletal disorders from staff and students of the Unit were selected in this study. Twenty-five normal subjects were recruited to participate in this research project. They were asked to stand on a force plate in quiet standing and while undertaking various hand tasks. The functional stability of the subjects was measured while transverse and vertical reaching tasks were undertaken. The correlation between various parameters of stability in quiet standing and functional hand tasks was evaluated using Pearson correlation.
RESULTS:
There was no significant correlation between static and dynamic stability parameters. The Pearson correlation coefficients for all parameters regarding the static and dynamic tests were less than 0.46.
CONCLUSIONS:
As there was no correlation between stability parameters in quiet standing and while performing various hand tasks, it is not practical to discuss ability of the subjects to control their balance while undertaking various hand tasks based on static balance ability.
KEYWORDS: Stability, Force plate, Static, Dynamic test
Balance is considered to be an important aspect of performance of all individuals whilst undertaking various daily activities, which is achieved by a complex process involving the function of musculoskeletal and neurological systems.1 Stability is often described as being static (quiet standing) and dynamic (maintaining a stable position while the subject undertakes a prescribed movement). Measuring the centre of pressure (COP) during various standing conditions such as single or double limb stance can be achieved by using a force platform.2 A force platform provides accurate information about postural control through calculation of COP or the point of application of the force distributed under the feet.3
There are lots of parameters collected from force plate output which can be used to represent the stability in quiet standing; these include: the COP path length, the COP excursion, speed of COP change, mean amplitude of COP sway, standard division of the forces applied on the force plate and standard division of the COP changes in the mediolateral and anteroposterior planes.4–11 In contrast, dynamic postural control often involves compilation of various tasks which also represent the performance of proprioception, range of motion of lower limb joints, strength of muscles and also the ability of the subjects to remain steady and upright.1,2,12 The Star Excursion Balance Test (SEBT) and Balance Error Scoring System (BESS) are the two cost effective and objective methods to represent the stability of the subjects dynamically.2,13
It is currently unclear as to whether or not the static balance is reflective of dynamic balance or not. The first research which determined the association between the static and dynamic balance was done by Hrysomallis et al; it was shown that there was a low correlation between the balance scores for static test on firm surface and the stepping test on the unstable surface. The subjects asked to stand on a single leg on force plate (static test) and to step onto an unstable surface and maintaining balance on a single leg for 20 seconds (dynamic test).2 However, handicapped subjects, such as cerebral palsy and spinal cord injury patients, were not able to stand on one leg or undertake the aforementioned tasks.8,10,14,15
The Johnson hand function is one of the tests used for analyzing stability during hand function to assess dynamic stability. The test was extended to include tasks such as vertical reaching and crossing the midline whilst standing, and moving small counterparts, lifting objects from lower to a higher shelf and pushing objects using the dominant side.1,12
Most of researchers have used only static balance test to evaluate the stability of normal and handicapped subjects16–18 while, it is important that subjects have balance when undertaking various tasks. Therefore, the main aim of this research study was to investigate the relationship between parameters of static and dynamic tests. The main difference between current research and the previous research was related to the type of dynamic tests used in this research. In previous study, the Balance Error Test has been used however, in the current research the subjects were asked to undertake various hand tasks.
Methods
This clinical trial has been carried out in the Bioengineering Unit of Strathclyde University between 2008 and 2009. A group of 25 normal subjects with no history of musculoskeletal disorders, based on their medical records, from all students of the Unit were selected in this study. For undertaking the research, an ethical approval was obtained from Strathclyde University Ethics Committee (thesis number T12696). Before starting the tests, a consent form was signed by each participant.
Equipment
A Kistler force plate instrumented with piezoelectric force transducers was used to measure the position of the centre of pressure which is considered to give a good approximation of sway. Sway during standing is defined by movements of Centre of Gravity (COG) in a horizontal plane. These movements are due to small deviations of the vertical ground reaction vector. Many researchers have studied sway by measuring the COP on the force platform.3,19
The force plate and the amplifier associated with it produce six voltage outputs that represents the mechanical inputs in:
Fx, Fy, Fz, Mx, My, Mz, which are the forces and moments applied on X, Y, and Z axes. The locations of the COP can be determined according to the following equations:3,6
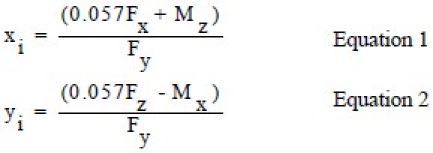
whereby 0.057 meter is the thickness of the force plate.
For the dynamic stability test, a table (width 80 cm, depth 60 cm) with height equal to 5 to 10 cm below the iliac crest was used. Moreover, 5 cylindrical weights marked with five different colors, with mass, height and diameter equal to 0.025 kg, 5 cm and 5 cm, respectively were employed. The cylindrical weights were positioned approximately 15 cm apart from left to right on five different coloured circles. From back side, the cloured circles were inserted with the same distance but in a reverse order. There was also a small table with a height of 20 cm for analyzing the stability during vertical reaching. The small table was located 25 cm behind the edge of the main table.
Parameters
For the stability test in quiet standing, the following parameters were selected:
The excursion of the COP in the mediolateral direction (ML)
The excursion of the COP in the anteroposterior direction (AP)
The mean values of the excursion of the COP in the mediolateral and anteroposterior planes (MAML, MAAP)
The standard deviation of the COP in the mediolateral and anteroposterior planes (SAP, SML)
For functional stability test the following parameters were selected:
The time of doing test for transverse reaching (Tt)
The time of doing test for vertical reaching (Vt)
The excursion of the COP in the mediolateral plane in vertical reaching test (MLV)
The excursion of the COP in the anteroposterior plane in vertical reaching test (APV)
The excursion of the COP in the mediolateral plane in transverse reaching test (MLT)
The excursion of the COP in the anteroposterior plane in transverse reaching test (APT)
Procedure
The accuracy of the force plate according to the manufacturer's manual was high and the error of the system was less than 1%. However, to maintain a guarantee of the output quality, some tests were carried out to evaluate the accuracy of the data for shear loads both in the mediolateral and anteroposterior directions and also for vertical loads. The results of force plate calibration showed that the errors of the system was not high, however it was more than supposed to be (between 1 and 2%).
In the next stage, subjects were instructed about the procedure and instruments. Then, their weight and their height were measured and recorded. The subjects were asked to stand on the force plate; they were instructed to look straight ahead, with their head erect and their arms at their sides in a comfortable position. The tests were recorded for one minute and were repeated 5 times for each subject. Analogue signals were sampled at a frequency of 120 Hz with an analogue to digital convertor and were stored on a computer. The signals of the force plate were filtered with a Butterworth low-pass filter at 10 Hz. The first and the last 15 seconds of the data were deleted and only 30 seconds of the data were used for the final analysis. The 30 seconds of the data was used to show the absolute sway of the COP. The first and the last 15 seconds of the data were deleted as the subject may have some small motions during the first part and have some muscle fatigue at the last part of data collection period.
For the functional stability test, the subjects were instructed to stand on the force plate and then after achieving appropriate level of stability were asked to move the weights from left to right to the corresponding colors on the back side as quickly as possible and back again from right to left. In this way, the anteroposterior and mediolateral COP sways and also the time necessary to complete the tasks were recorded. The test was repeated in order to collect 5 successful trials.
In the second part of the dynamic stability test, a small table was located on top and 25 cm behind the edge of the main table and the subjects were asked to lift cylindrical weights and put them on top of the small table, without considering the colors and the location, and then return them to their first positions. The same parameters were collected and the tests were repeated a total of 5 times.
The mean and standard deviation of the aforementioned parameters were determined. To determine the association between the value of static balance and functional hand test, Pearson product moment correlation coefficient (r) was calculated. The SPSS software, generation 15, developed by IBM Company, was used for final analysis. The normal distribution of the parameters was evaluated by use of Shapiro-Wilk test. The significant level was chosen as 0.05.
Results
The mean (± SD) of the age, mass and height of the participants were 27 (± 2.7) years, 77 (± 12) kg and 1.76 (± 0.05) meters. The mean values of stability during quiet standing and while undertaking various hand tasks are shown in Table 1.
Table 1.
The mean values of the static and dynamic stability parameters during quiet standing and while undertaking various hand tasks
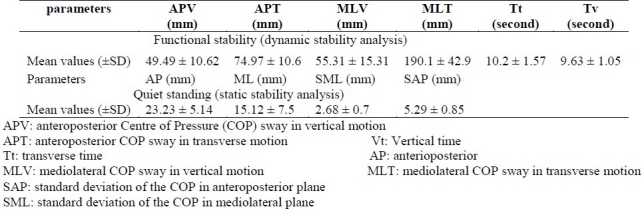
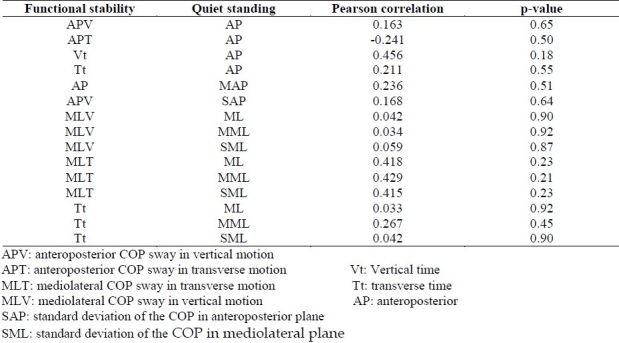
The mean value of the COP sway in the mediolateral direction was more than that in the anteroposterior direction during vertical reaching test while the excursion of the COP in the mediolateral direction was nearly two times more than that in the anteroposterior direction, during transverse reaching test. The excursion of the COP in both planes during quiet standing was less than that in dynamic test. There was no significant correlation between the parameters of the static and dynamic stability (Table 2). The Pearson correlation coefficient varied between 0.05 and 0.456.
Table 2.
The correlation between static and dynamic parameters
Discussion
Although, static balance test has been used to determine the stability of the subjects in quiet standing, the dynamic balance test is assumed to be more specific and challenging than the static test. Other investigators have used only static test for measuring the balance of the handicapped subjects; however, no one reported that static balance test can predict the stability of the subjects while undertaking various tasks.
As can be seen from Table 2, there was no correlation between the stability of the participant in quiet standing and undertaking various hand tasks. However, it seems that the correlation between the excursion of the COP in quiet standing and during transverse reaching tasks is more than that of the other parameters.
A few researchers have tried to evaluate the correlation between dynamic and static stability in healthy subjects or those with ankle sprain. They have reported that the correlation between the stability parameters during quiet standing and dynamic test is not significant. As can be seen from the research done in this regard, different conditions and interventions may influence dynamic balance but not static balance. It means that the relationship between static and dynamic balance is not high and using only one measure, static balance, can not represent the stability of the subjects. The main difference between the current research study and the previous research was related to the type of dynamic tests used in thiss research. The subjects were asked to undertake various hand tasks in the current research while in the previous research, the subjects were asked to do Balance Error Test.19
Conclusions
It is not possible to use some dynamic tests such as SEBT and BESS for the most handicapped subjects. Functional hand tasks is one of the dynamic tests which can be used in this regard. It was found that the associations between the two types of balance tests used in the current research are weak. So it can be concluded that the performance of the subjects in the static test can not reflect the stability of the subjects in more challenging balance tasks. It is not practical to discuss the ability of the subjects to control their balance, while undertaking various hand tasks, based on static balance ability.
Authors’ Contributions
Both authors have carried out the study, participated in the design of the study and acquisition of data performed the statistical analysis and wrote the manuscript. Both authors read and approved the final manuscript.
Acknowledgments
The author wishes to thank all subjects who kindly participated in this research. This project was supported by a grant devoted to author by Iranian Ministry of Health and Medical Educations.
Footnotes
Conflict of Interests
Authors have no conflict of interests.
References
- 1.Jacobson GP, Newman CW, Kartush JM. Handbook of balance function testing. New York: Mosby; 1992. [Google Scholar]
- 2.Hrysomallis C, McLaughlin P, Goodman C. Relationship between static and dynamic balance tests among elite Australian Footballers. J Sci Med Sport. 2006;9(4):288–91. doi: 10.1016/j.jsams.2006.05.021. [DOI] [PubMed] [Google Scholar]
- 3.Hall MG, Fleming HE, Dolan MJ, Millbank SF, Paul JP. Static in situ calibration of force plates. J Biomech. 1996;29(5):659–65. doi: 10.1016/0021-9290(95)00109-3. [DOI] [PubMed] [Google Scholar]
- 4.Raymakers JA, Samson MM, Verhaar HJ. The assessment of body sway and the choice of the stability parameter(s) Gait Posture. 2005;21(1):48–58. doi: 10.1016/j.gaitpost.2003.11.006. [DOI] [PubMed] [Google Scholar]
- 5.Hytonen M, Pyykko I, Aalto H, Starck J. Postural control and age. Acta Otolaryngol. 1993;113(2):119–22. doi: 10.3109/00016489309135778. [DOI] [PubMed] [Google Scholar]
- 6.Le Clair K, Riach C. Postural stability measures: what to measure and for how long. Clin Biomech (Bristol, Avon) 1996;11(3):176–8. doi: 10.1016/0268-0033(95)00027-5. [DOI] [PubMed] [Google Scholar]
- 7.O’Connell M, George K, Stock D. Postural sway and balance testing: a comparison of normal and anterior cruciate ligament deficient knees. Gait Posture. 1998;8(2):136–42. doi: 10.1016/s0966-6362(98)00023-x. [DOI] [PubMed] [Google Scholar]
- 8.Middleton JW, Sinclair PJ, Smith RM, Davis GM. Postural control during stance in paraplegia: effects of medially linked versus unlinked knee-ankle-foot orthoses. Arch Phys Med Rehabil. 1999;80(12):1558–65. doi: 10.1016/s0003-9993(99)90330-1. [DOI] [PubMed] [Google Scholar]
- 9.Murray MP, Seireg AA, Sepic SB. Normal postural stability and steadiness: quantitative assessment. J Bone Joint Surg Am. 1975;57(4):510–6. [PubMed] [Google Scholar]
- 10.Kagawa T, Fukuda H, Uno Y. Stability analysis of paraplegic standing while wearing an orthosis. Med Biol Eng Comput. 2006;44(10):907–17. doi: 10.1007/s11517-006-0087-4. [DOI] [PubMed] [Google Scholar]
- 11.Kaoru A. Comparison of static balance, walking velocity, and energy consumption with knee-ankle-foot orthosis, walkabout orthosis, and reciprocating gait orthosis in thoracic-level paraplegic patients. Journal of Prosthetics and Orthotics. 2006;18(3):87–91. [Google Scholar]
- 12.Triolo RJ, Reilley BWB, Freedman W, Betz RR. Development and standardization of a clinical evaluation of standing function: the functional standing test. IEEE Transactions on Rehabilitation Engineering. 1993;1(1):18–25. [Google Scholar]
- 13.Ross SE, Guskiewicz KM. Examination of static and dynamic postural stability in individuals with functionally stable and unstable ankles. Clin J Sport Med. 2004;14(6):332–8. doi: 10.1097/00042752-200411000-00002. [DOI] [PubMed] [Google Scholar]
- 14.Middleton JW, Yeo JD, Blanch L, Vare V, Peterson K, Brigden K. Clinical evaluation of a new orthosis, the ‘walkabout’, for restoration of functional standing and short distance mobility in spinal paralysed individuals. Spinal Cord. 1997;35(9):574–9. doi: 10.1038/sj.sc.3100459. [DOI] [PubMed] [Google Scholar]
- 15.Baardman G, IJzerman MJ, Hermens HJ, Veltink PH, Boom HB, Zilvold G. The influence of the reciprocal hip joint link in the Advanced Reciprocating Gait Orthosis on standing performance in paraplegia. Prosthet Orthot Int. 1997;21(3):210–21. doi: 10.3109/03093649709164559. [DOI] [PubMed] [Google Scholar]
- 16.Nejc S, Jernej R, Loefler S, Kern H. Sensitivity of body sway parameters during quiet standing to manipulation of support surface size. Journal of Sport Science and Medicine. 2010;9:431–8. [PMC free article] [PubMed] [Google Scholar]
- 17.Melzer I, Benjuya N, Kaplanski J, Alexander N. Association between ankle muscle strength and limit of stability in older adults. Age Ageing. 2009;38(1):119–23. doi: 10.1093/ageing/afn249. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 18.Hatton AL, Dixon J, Martin D, Rome K. The effect of textured surfaces on postural stability and lower limb muscle activity. J Electromyogr Kinesiol. 2009;19(5):957–64. doi: 10.1016/j.jelekin.2008.04.012. [DOI] [PubMed] [Google Scholar]
- 19.Barnett RW. Paraplegic standing and reciprocal gait using a floor reaction hybrid F.E.S. orthosis. Glasgow: University of Strathclyde; 1990. [Google Scholar]