

Abstract
This paper presents in vivo experimental results for a closed loop wireless power transmission system to implantable devices on an awake behaving animal subject. In this system, wireless power transmission takes place across an inductive link, controlled by a commercial off-the-shelf (COTS) radio frequency identification (RFID) transceiver (TRF7960) operating at 13.56 MHz. Induced voltage on the implantable secondary coil is rectified, digitized by a 10-bit analog to digital converter, and transmitted back to the primary via back telemetry. Transmitter (Tx) and receiver (Rx) circuitry were mounted on the back of an adult rat with a nominal distance of ~7 mm between their coils. Our experiments showed that the closed loop system was able to maintain the Rx supply voltage at the designated 3.8 V despite changes in the coils’ relative distance and alignment due to animal movements. The Tx power consumption changed between 410 ~ 560 mW in order to deliver 27 mW to the receiver. The open loop system, on the other hand, showed undesired changes in the Rx supply voltage while the Tx power consumption was constant at 660 mW.
I. Introduction
INDUCTIVE power transmission is widely used to power up radio frequency identification (RFID) transponders and some implantable microelectronic devices (IMD) due to size, weight, safety, and lifetime limitations of batteries [1], [2]. In these systems, wireless power transmission takes place across a pair of loosely coupled coils, preceded by a power amplifier (PA) on the external unit, and followed by an efficient rectifier on the implanted unit to provide the transponder/IMD with an unregulated supply voltage [3].
The coupling factor, k, between transmitter (Tx) and receiver (Rx) coils, which determines the amount of power delivered to the Rx, is proportional to d−3, where d is the center-to-center spacing between the coils when they are in parallel planes and perfectly aligned [1]. Therefore, k is strongly dependent on the coils’ distance variations and mis-alignments. Received power also varies significantly with k, which can potentially result in either vary large voltages across the secondary coil or insufficient power delivered to the load [4]. Large voltages can increase heat dissipation within the IMD and damage the surrounding tissue.
A closed loop power transmission system is needed to change the transmitted power in a way that the received power stays slightly above the minimum level that keeps the IMD operational [5]-[10]. In such systems, the information about the received power is sent from the IMD to the outside of the body either through back telemetry based on load shift keying (LSK) [5]-[8] or actively along with other biological data [9],[10]. In [5], an analog to digital converter (ADC) digitizes the rectifier voltage inside the IMD to provide the power bits for digital communication. In [6]-[9], the rectifier voltage has been compared with a reference voltage, and a power bit is generated and transmitted to the Rx. In the external unit, a detection circuit receives the back telemetry data and a control unit provides the necessary voltage for the power amplifier (PA) through a power efficient DC-DC converter [5], [6]. The Tx supply voltage is adjusted utilizing an n-bit digital to analog converter (DAC) followed by a Darlington-connected BJT pair in [7], [8]. In [10], the IMD received power is regulated through a frequency control method in which the power carrier frequency is changed to detune the Rx coil and adjust the secondary absorbed power.
We have previously reported and analyzed an RFID-based closed loop wireless power transmission system in [6] and [7]. In our proposed system, we have taken advantage of the built-in capabilities of commercial off-the-shelf (COTS) RFID transceivers in the external unit instead of developing a custom application specific integrated circuit (ASIC) through a long and costly process. One problem with our previous system and [8], [9] is that the IMD supply level is still unknown when only one power bit is sent to the external unit. There is often an ADC in most IMDs, which can be utilized to digitize the rectifier voltage more precisely at the cost of more required bandwidth [5]. Since motion artifacts cause low frequency variations relative to some biosignals such as single unit neural activity, the additional overhead is negligible compared to the bandwidth offered by the RFID back telemetry link (~0.5 Mb/s).
In the past we had only tested our system on a bench-top setting and manually changed the coils’ relative positions [6]. We have also demonstrated the stability and robustness of the system against Rx coil rotation and load variations [6]. In this paper we report not only on the most recent updates on our RFID-based closed loop power transmission system but also describe the first in vivo experimental results from this system. The Tx and Rx modules were mounted on the back of an awake behaving rat while Tx and Rx coils were separated by several sheets of plastic, resembling the skin. We conducted experiments for both open and closed loop power transmission mechanisms to show the functionality and significance of the closed loop system in a realistic condition, short of an actual implantation. The closed loop power transmission system including RFID transponder and transmitter blocks are discussed in section II. The experimental results are given in section III followed by the conclusion remarks in section IV.
II. System Architecture
Block diagram of the proposed RFID-based closed loop power transmission system, which is composed of a power transmitter and a stand alone transponder, is shown in Fig. 1. In this system, power transfer takes place across the primary and secondary coils, L1 and L2, from the Tx to the IMD (Rx). The AC voltage across L2 is rectified, digitized, and sent back to the Tx using LSK. A major change in Fig. 1 compared to our previous system in [6] is an ultra low power MSP430 microcontroller (Texas Instruments, Dallas, TX) with a 10-bit built-in ADC in the transponder. Therefore, the Tx can adjust the transmitted power adaptively in order to maintain the rectifier voltage at a designated level with 10 bits of accuracy, which oppose to the previously reported coarse mechanisms utilizing only one bit.
Fig. 1.

Block diagram of the RFID-based closed loop power transmission system utilizing a 10-bit ADC on the transponder side (IMD) to report the actual rectifier voltage to the control mechanism on the external transmitter side.
A. Standalone IMD Transponder
The IMD transponder consists of a rectifier, a 3.3 V regulator, LSK circuit, and an MSP430 microcontroller with a built-in 10-bit ADC. A wideband fullwave rectifier is used to convert the 13.56 MHz power carrier to a DC voltage, Vrec, which is attenuated (0.5 × Vrec), sampled, and digitized with respect to a 3.3 V reference voltage at 500 Hz. The resulting 10 bits of information about the rectifier output voltage is combined with start bits, “01”, and sent back to the Tx by closing M1 switch (BSS138 MOSFET) at a rate of 250 kHz with short (375 ns) pulses to prevent unnecessary power dissipation. MSP430 microcontroller was operated by its 16 MHz internal clock, which resulted in a total power dissipation of 27 mW in the IMD transponder.
B. Power Transmitter
The transmitter should not only power up the transponder but also detect the back telemetry data, including the transponder power level information, in order to close the wireless power transmission loop. An RFID reader is a good candidate for this purpose because it can both drive a coil and recover LSK back telemetry data. Because of the short distance between Tx and Rx coils in IMD applications, the TRF7960 RFID reader chip from Texas Instruments was chosen, which is equipped with a built-in class-D PA that can provide up to 200 mW output power. The PA output power was adjusted by changing its supply voltage, Tx_VDD, through an efficient DC-DC converter (TPS61070) with more than 90% power conversion efficiency.
The RFID reader detects the back telemetry data and delivers it to the control unit, which is composed of an nRF24LE1 microcontroller, a digital potentiometer, and the DC-DC converter, as shown in Fig. 1. Received raw data is oversampled by the microcontroller that operates with an accurate 16 MHz timebase from a crystal oscillator. The microcontroller always searches for the start bits, “01”, and when they are detected, recovers the rest of the packet, which is the IMD rectifier voltage digitized in 10 bits and designated as Vrec,dig in Fig. 1. In order to adjust Vrec = 3.8 V, which is 0.5 V above the desired regulator output, the decimal value of Vrec,dig is compared with a threshold = 560 in the microcontroller. If the result is negative, the control unit increases the transmitted power and vice versa. The control unit also maintains the transmitted power when it receives 560, which implies that Vrec = 3.8 V. In the presence of any external disturbance, the control unit reduces or increases the transmitted power according to Vrec,dig value until it receives 560. In the steady state, the rectifier voltage has negligible ripple due to constant transmitted power, which is not the case when only one bit is sent to the Tx [6].
The DC-DC converter output voltage is proportional to its resistive feedback ratio. A counter inside the digital potentiometer, driven by a 500 Hz clock form the microcontroller, normally counts up and increases the resistive ratio of the feedback loop. The 100 kΩ digital potentiometer can change the Tx_VDD from 3.5 to 5 V in 100 steps. When microcontroller changes the direction of the potentiometer counter, the feedback resistive ratio of the DC-DC converter is decreased and consequently Tx_VDD is reduced.
III. Experimental Results
Fig. 2 shows the RFID-based closed loop power transfer experimental setup. All experiments were conducted with prior approval from the Institutional Animal Care and Use Committee (IACUC) at Michigan State University. A 1 year old adult Sprague Dawley rat, weighing 400 g, was the animal model. A printed spiral coil (PSC) fabricated on FR4 printed circuit board and a wire-wound coil fabricated with Litz wire (AWG 30) were utilized as the Tx and Rx coils, respectively. Table I shows the optimal geometries of these coils for fP = 13.56 MHz and other system specifications [11]. The Tx circuitry was placed in a PET box and mounted on the back of the rat using a special jacket. The Tx coil, L1, was located at the bottom of the box, as shown in Fig. 2 right inset. The IMD transponder circuitry was mounted on top of the box and the Rx coil, L2, was placed between the jacket and the box at ~7 mm separation from L1 using plastic sheets. A 10 cm twisted pair of Litz wires connected the IMD transponder to L2, as shown in Fig. 2 left inset. A dual-axis thermal accelerometer (28017, Memsic, Rocklin, CA) was embedded in the box to measure vibrations with 1 mg resolution at 100 Hz. Acceleration in the X- and Y-axes indicate the misalignment and distance variations between L1 and L2, respectively. The PA supply voltage (Tx_VDD), received rectifier voltage (Vrec,dig), and accelerometer X- and Y-axis outputs were oversampled by a data acquisition module (USB-6259, National Instruments, Austin, TX) at 500 kHz. During the experiment, the operator tried to move the data acquisition module along with the animal. However, the tethering effect of interconnects possibly added to the motion artifacts between the two coils, which was not a major problem considering the purpose of this experiment.
Fig. 2.
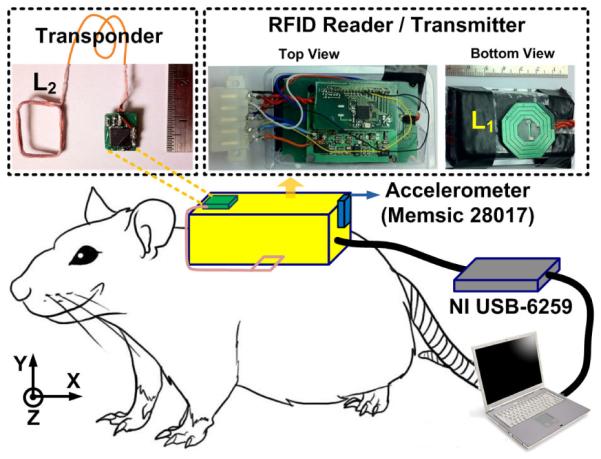
RFID-based closed loop power transfer in vivo experimental setup. L2 was placed between a special jacket and the Tx box (not implanted).
Table I.
Optimal Coils Geometries and System Specifications
| Parameters | Designed Values |
|---|---|
| Tx printed spiral coil (L1) | Inductance = 0.43 μH |
| Outer diameter = 2.7 cm | |
| Inner diameter = 1.1 cm | |
| Line width = 2 mm | |
| Number of turns = 4 | |
|
| |
| Rx Litz wire-wound coil (L2) | Inductance = 0.8 μH |
| Dimension = 1.2 × 1 cm2 | |
| Wire diameter = 0.25 mm | |
| Number of turns = 6 | |
| Number of strands = 44 | |
|
| |
| Power transmission frequency | 13.56 MHz |
| Back telemetry data rate | 250 kHz |
| Power update frequency | 500 Hz |
|
| |
| Weight of the reader/Tx box | 26.1 g |
| Weight of the IMD transponder | 0.8 g |
An experiment was conducted to demonstrate the significance and functionality of the closed loop power transmission system in comparison with the same system when it was open loop. Considering that open loop power transmission systems need to operate based on the worst case conditions [6], in the first part of this test, we opened the power control loop in Fig. 1 by disconnecting Tx_VDD from the DC-DC converter output and connecting it to a fixed 5 V, which was the maximum available supply level. Fig. 3a shows Vrec,dig and the fixed Tx_VDD vs. time. Here we are only showing a 60 s window of the recorded data, during which we observed the largest vibrations, resulting in up to ~1.8 V variations in Vrec,dig. It can be seen that Vrec,dig is much higher than the desired 3.8 V because of maximizing Tx_VDD, resulting in additional power dissipation in the IMD transponder. Figs. 3b and 3c show the acceleration in the X- and Y-axis, respectively. It can be seen that when acceleration along the X-axis is negative, the rectifier voltage has been reduced, while positive acceleration leads to increments in the rectifier voltage. This can be because of an initial misalignment between the coils, with the animal movements in positive direction helping to better align the coils while movements in the negative direction worsening the misalignment.
Fig. 3.

Open loop inductive power transmission system measured waveforms: (a) Tx power amplifier supply voltage (Tx_VDD) and recived rectifier voltage (Vrec,dig) in Fig. 1. (b) Acceleration in X-axis. (c) Acceleration in Y-axis.
In the second part of the experiment, the closed loop system was tested in similar conditions. Fig. 4a shows Vrec,dig and Tx_VDD vs. time. Comparing these waveforms with Fig. 3a shows that the closed loop system has maintained the rectifier output voltage constant at the designated level (3.8 V) by changing Tx_VDD within 4.2~4.6 V. Figs. 4b and 4c show the acceleration in the X- and Y-axis, respectively. It can be seen that the PA supply voltage has increased when acceleration in the Y-axis is positive, which indicates that the coils’ relative distance has been slightly increased during those times. Nonetheless, the coil vibrations are generally small in this experiment due to the mass of the Tx box and its contents.
Fig. 4.

Closed loop inductive power transmission system measured waveforms: (a) Tx power amplifier supply voltage (Tx_VDD) and recived rectifier voltage (Vrec,dig) in Fig. 1. (b) Acceleration in X-axis. (c) Acceleration in Y-axis.
IV. Conclusion
In vivo experimental results for a wireless closed loop power transmission system have been reported. The RFID-based system was able to keep the IMD transponder rectifier voltage at the designated level in presence of coupling variations due to awake behaving animal movements. A built-in 10-bit ADC in an MSP430 microcontroller provided the accurate value of the IMD supply voltage. The open loop system showed large voltage variations, which can increase heat dissipations in the IMD and external power transmitter. The closed loop system, however, can increase the overall system power efficiency. Our next step is to implant the Rx module inside the animal body and test the closed loop power transmission system in the most realistic condition.
Acknowledgments
This work was supported in part by the National Institutes of Health grant 1R01NS062031301A1, and the National Science Foundation under award ECCS3824199.
Contributor Information
Mehdi Kiani, GT-Bionics Lab, School of Electrical and Computer Engineering at Georgia Institute of Technology, Atlanta, GA, USA.
Ki Yong Kwon, Neural Systems Engineering Lab, ECE Dept., College of Eng. at Michigan State University, East Lansing, MI, USA..
Fei Zhang, Neural Systems Engineering Lab, ECE Dept., College of Eng. at Michigan State University, East Lansing, MI, USA..
Karim Oweiss, ECE Dept. and Neuroscience Program at Michigan State University, East Lansing, MI..
Maysam Ghovanloo, GT-Bionics Lab, School of Electrical and Computer Engineering at Georgia Institute of Technology, Atlanta, GA, USA.
References
- [1].Finkenzeller K. RFID-Handbook. 2nd ed Wiley; Hoboken, NJ: 2003. [Google Scholar]
- [2].Clark GM. Cochlear Implants: Fundamentals and Applications. Springer-Verlag; New York: 2003. [Google Scholar]
- [3].Lee H, Ghovanloo M. An integrated power-efficient active rectifier with offset-controlled high speed comparators for inductively powered applications. IEEE Trans. Cir. Syst. I. doi: 10.1109/TCSI.2010.2103172. Accepted for publication in. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [4].Baker MW, Sarpeshkar R. Feedback analysis and design of RF power links for low-power bionic systems. IEEE Trans. Biomed. Circuits Syst. 2007 Mar;vol. 1(no. 1):28–38. doi: 10.1109/TBCAS.2007.893180. [DOI] [PubMed] [Google Scholar]
- [5].Wang G, Liu W, Sivaprakasam M, Kendir GA. Design and analysis of an adaptive transcutaneous power telemetry for biomedical implants. IEEE Trans. Circuits Syst. I. 2005 Oct;vol. 52(no. 10):2109–2117. [Google Scholar]
- [6].Kiani M, Ghovanloo M. An RFID-based closed loop wireless power transmission system for biomedical applications. IEEE Trans. Cir. Syst. II. 2010 Apr;vol. 57(no. 4):260–264. doi: 10.1109/TCSII.2010.2043470. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [7].Kiani M, Ghovanloo M. A closed loop wireless power transmission system using a commercial RFID transceiver for biomedical applications. IEEE 31st Eng. in Med. and Biol. Conf.; Sep, 2009. pp. 3841–3844. [DOI] [PMC free article] [PubMed] [Google Scholar]
- [8].Bashirullah R, Liu W, Ji Y, Kendir A, Sivaprakasam M, Wang G, Pundi B. A smart bi-directional telemetry unit for retinal prosthetic device. IEEE Intl. Symp. Cir. Syst. 2003 May;vol. 5:V5–V8. [Google Scholar]
- [9].Chaimanonart N, Zimmerman M, Young DJ. Adaptive RF power control for wireless implantable bio-sensing network to monitor untethered laboratory animal real-time biological signals. IEEE Sensors Conf..Oct, 2008. pp. 1241–1244. [Google Scholar]
- [10].Dissanayake T, Hu A, Malpas S, Bennet L, Taberner A, Booth L, Budgett D. Experimental study of a TET system for implantable biomedical devices. IEEE Trans. Biomed. Cir. Syst. 2009 Dec;vol. 3:370–378. doi: 10.1109/TBCAS.2009.2031539. [DOI] [PubMed] [Google Scholar]
- [11].Jow UM, Ghovanloo M. Design and optimization of printed spiral coils for efficient transcutaneous inductive power transmission. IEEE Trans. Biomed. Cir. Syst. 2007 Sept;vol. 1(no. 3):193–202. doi: 10.1109/TBCAS.2007.913130. [DOI] [PubMed] [Google Scholar]