

Abstract
Crouch gait decreases walking efficiency due to the increased knee and hip flexion during the stance phase of gait. Crouch gait is generally considered to be disadvantageous for children with cerebral palsy; however, a crouched posture may allow biomechanical advantages that lead some children to adopt a crouch gait. To investigate one possible advantage of crouch gait, a musculoskeletal model created in OpenSim was placed in 15 different postures from upright to severe crouch during initial, middle, and final stance of the gait cycle for a total of 45 different postures. A series of optimizations was performed for each posture to maximize transverse plane ground reaction forces in the 8 compass directions by modifying muscle forces acting on the model. We compared the force profile areas across all postures. Larger force profile areas were allowed by postures from mild crouch (for initial stance) to crouch (for final stance). The overall ability to generate larger ground reaction force profiles represents a mechanical advantage of a crouched posture. This increase in muscle capacity while in a crouched posture may allow a patient to generate new movements to compensate for impairments associated with cerebral palsy, such as motor control deficits.
Introduction
Crouch gait, a common condition among children with cerebral palsy, decreases walking efficiency due to the increased knee and hip flexion during the stance phase of gait [1]. Excessive knee flexion increases the energy requirements of walking [2] which can deteriorate joints and lead to chronic knee pain [3, 4]. If left untreated, these symptoms can worsen over time [5]. The lifetime costs for persons born in 2000 with cerebral palsy in the United States are estimated to total $11.5 billion in 2003 US dollars and place great demands on the healthcare system [6].
The disadvantages of crouch gait are well known; however, it remains challenging to elucidate mechanisms that lead to a crouched posture [7]. Several factors have been linked with crouch gait, including muscle weakness, spasticity, tightness [8, 9, 10], decreased motor control [11], and skeletal deformities [12]. Despite being studied for decades, a cause and effect relationship between these factors and crouch gait remains unknown, due to the complexity of the musculoskeletal system [13, 14, 15, 10, 16].
Crouch gait is generally considered to be a negative symptom of cerebral palsy; however, it may afford biomechanical advantages that lead some patients to adopt a crouch gait. Previous study has shown that a crouched posture reduces the capacity of muscles to extend the hip and knee [17], but only in the vertical direction. An athlete gets lower to increase the ability to produce movement in all directions. Similarly, a standing passenger on a moving train gets lower to increase the ability to resist movement. In each case, the movement was produced or resisted by generating ground reaction forces in the transverse plane. A link between crouched gait postures and the capacity of muscles to generate ground reaction forces has several clinical implications. If a crouched posture reduces the capacity of muscles to generate ground reaction forces, patients may have to spend more energy to maintain a crouched posture compared to an upright posture. However, if a crouched posture increases this capacity, patients may be better suited to produce or resist movements to avoid injuries from falling or tripping.
In this study, we used musculoskeletal modeling and optimization to evaluate one such possible advantage of crouch gait. The objective was to determine if posture influences muscles capacity to generate ground reaction forces in the transverse plane during initial, middle, and final stance of a gait cycle. We hypothesized that a crouched posture allows the largest force profile area among postures from upright to severe crouch. Identifying the relationship between posture and ground reaction forces may show an advantage to adopting a crouched posture to compensate for impairments associated with cerebral palsy.
Methods
A three-dimensional musculoskeletal model with 15 degrees-of-freedom and 92 muscles-tendon actuators was created in OpenSim [18]. The model consists of a head, trunk, pelvis, and a right and left femur, tibia, and foot segments. The lower extremity joints were modeled as follows: the subtalar and ankle joint were revolute joints, each knee was a planar joint, and the hip was a ball-and-socket joint. The head and torso were included in the model and were articulated with the pelvis through a ball-and-socket joint. The foot and floor contact was modeled as a weld joint similarly to Anderson and Pandy [19]. The arms were not included in the musculoskeletal model, but the mass of the arms was included in the head and torso.
Upright and crouch gait kinematics were recorded in the database at the Center for Gait and Motion Analysis at Gillette Children’s Specialty Healthcare, St. Paul, MN and obtained from a previous study [17]. Subjects with cerebral palsy (aged 6 or older) had to walk with a crouch gait to be included in the study. Arnold et al. [20] defined crouch gait as walking with a knee flexion angle greater than 15° throughout the stance phase and a minimum of 20° at initial contact. Joints angles of the subjects walking over an entire gait cycle were calculated using a standard clinical protocol to track 3D motion of markers placed on the lower extremity. Joint angles were normalized to a percentage of the gait cycle and averaged for each group. In this study, we used data from the crouch group that exhibit an average of 40° of knee flexion at initial contact. Normal (upright) posture was defined from the average gait data of 83 able-bodied subjects walking at self selected speeds while crouch was defined from the average gait data of 100 subjects with cerebral palsy and crouch gait (Figure 1).
Figure 1.

Average joint kinematics for upright and crouch gait for the whole gait cycle. The solid line shows the mean values for a group of 83-able bodied children. The dotted line shows the mean values for a group of 100 subjects with cerebral palsy who walked in a crouch gait. Classification of crouch gait is based on the knee flexion angle at initial contact. The bands around both lines show ±1 standard deviation of the mean values. Experimental postures for upright and crouch were taken from the mean values of each group at initial, middle, and final stance. Joint angles for around 80% of our postures were within 1 standard deviation of the mean joint angles for crouch or upright, while all of the postures were with within 2 standard deviations of the mean joint angles for crouch.
Knee flexion angles for crouch gait shows that subjects adopt a range of gait patterns for walking with a crouch gait; the musculoskeletal model was placed in 15 different postures from upright to severe crouch during initial stance at 14% of the gait cycle, middle stance at 32% of the gait cycle, and final stance at 50% of the gait cycle. We linearly interpolated nine additional postures between upright and crouched postures from the experimental data during initial, middle, and final stance (Figure 2). We extrapolated four additional postures (severe crouch) with knee flexion angles greater than crouch. For the initial, middle, and final period of the stance phase, we numbered each posture accordingly: #1 is experimental upright posture, #2 through #10 are interpolated postures, #11 is experimental crouched posture, #12 through #15 are extrapolated postures (severe crouch). The model was placed in a total of 45 postures (15 for each of the three periods) for the study. All of our postures had joint angles that were within 2 standard deviations from the mean joint angles of crouch or upright.
Figure 2.

Three-dimensional musculoskeletal models placed in 4 (of 15 total) postures during middle stance at 32% gait cycle shown with maximum horizontal ground reaction force profiles in the transverse plane: (a) experimental upright posture, (b) interpolated posture between experimental upright and crouch data, (c) experimental crouched posture, (d) and extrapolated posture from experimental upright and crouch data (severe crouch). The average vertical ground reaction force is also shown for each posture. This trend of decreasing vertical ground reaction forces is consistent with Hicks et al. [17].
To determine the relationship between posture and ground reaction forces, a series of optimizations was performed for each postures from upright to severe crouch during initial, middle, and final stance. An interior point optimizer (IPOPT) was implemented to maximize the ground reaction forces for the 8 compass directions in the transverse plane by modifying muscle forces acting on the model. Each optimization was subject to a set of constraints requiring the center of pressure to be under the stance foot, the vertical ground reaction force to be greater than or equal to zero, and each muscle force was constrained to be less than or equal to its maximum isometric force. A ground reaction force profile was generated for each posture by finding the area of the forces generated in the 8 compass directions (Figure 2). Using the generated force profile area from initial, middle, and final stance, the results were interpolated to show the force profile areas over the entire stance phase of gait. We evaluated our hypothesis by comparing the force profile area between postures.
Results
A range of crouched postures allowed the largest ground reaction force profile area during the stance phase of gait (Figure 3, Table 1). Over the stance phase, the maximum force profile areas occurred between mild crouch (#5) and severe crouch postures (#12) from initial stance to final stance. During initial stance, interpolated postures (#4–6) between upright and crouch allowed the largest ground reaction force profiles. These postures produced force profile areas within 1% of each other, with posture #5 being the largest (2.582 kN2). Comparatively, experimental upright (#1) and experimental crouched (#11) postures had 12–13% (2.265 and 2.272 kN2, respectively) smaller force profile areas, and severe crouch (#15) was roughly 23% smaller (1.999 kN2). The crouched posture (#11) during middle stance produced the largest force profile areas (2.676 kN2) with this trend continuing to final stance. Postures #8–12 produced force profile area within 2% of each other. During final stance, a posture between crouch and severe crouch (#12) allowed the largest ground reaction force profiles (2.514 kN2); however, this force profile area was less than 2% larger compared to crouch (#11). The force profile area (2.487 kN2) of experimental crouch was 7.3% higher compared to experimental upright and 4% higher than severe crouch during final stance.
Figure 3.
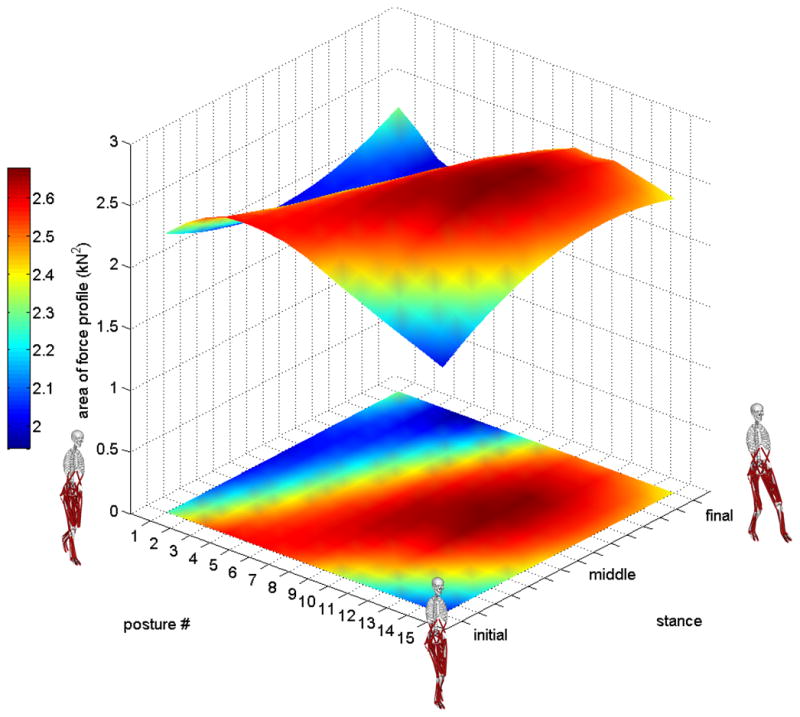
Areas of ground reaction force profiles across three parts of stance and across all postures (intermediate force profile areas between initial-middle-final generated with a cubic spline interpolation). Force profile areas throughout stance are from lowest (blue) to highest (red). During early stance, mild crouched postures (#4-6) allowed the greatest forces. During late stance, crouched postures (#9-11) allowed greater forces compared to upright.
Table 1.
Three largest force profile areas for each part in the stance phase of gait
| Force Profile Area (kN2)–[Posture #] | |||
|---|---|---|---|
| Initial Stance | 2.581 – [5] | 2.573 – [6] | 2.572 – [4] |
| Middle Stance | 2.676 – [11] | 2.661 – [10] | 2.653 – [9] |
| Final Stance | 2.514 – [12] | 2.488 – [11] | 2.502 – [10] |
Discussion
This study examined how posture influences ground reaction forces generated by muscles. We found that the force profile areas for initial stance was highest for postures near mild crouch and decreases as postures move towards upright and crouch. The force profile area increased during middle stance as postures change from mild crouch to crouch and decreased as postures move beyond crouch to severe crouch. The trend for final stance was similar to that of middle stance except that upright showed a slight increase.
Our results show that postures between mild crouch and severe crouch postures were able to produce the largest force profile area during the stance phase of gait. Our study is fundamentally different from Hicks et al. [17], which examined the effect of crouch postures on the capacity of muscles to extend the hip and knee joints. Their study used induced acceleration analysis [13] to determine the joint angular accelerations towards extension resulting from the application of 1 N muscle force to the musculoskeletal model. The joint angular accelerations resulting from the induced acceleration analysis reflects the influence of muscle geometry and posture on the capability of each muscle’s contribution to extend the hip and knee joints. Their study showed almost all of the major hip and knee extensors’ capacities were reduced in crouch gait. This finding suggests a reduction in the ability to generate vertical ground reaction force. In our case, we used optimization to maximize horizontal ground reaction forces in the transverse plane without regard for the vertical ground reaction force. However, a vertical ground reaction force is necessary to achieve the horizontal ground reaction forces (Figure 2). Our finding suggests an increase in the ability to generate these horizontal forces. Furthermore, our vertical ground reaction forces generated are consistent with the findings in Hicks et al. [17] that crouched posture reduces the ability to generate vertical ground reaction force (Figure 2).
There were several challenges present in our study and the results should be interpreted in context with our research challenges. First, the optimization procedure implemented to calculate the maximum ground reaction force was static rather than dynamic optimization. Dynamic optimization involves minimizing or maximizing the cost objective function over a period of time; this was not implemented in our study as the model was placed in a given posture while the muscles were able to generate force. Hence, static optimization was better suited for our study. Anderson and Pandy [21] showed that static optimization was equivalent to dynamic optimization in biomechanics. Second, our musculoskeletal model did not incorporate any skeletal abnormalities, such as tibial torsion [22], commonly seen in children with cerebral palsy walking with crouch gait. Our study was focused on examining the different postures and their influence on ground reaction forces. Incorporating bone deformities such as tibial torsion would add additional variables to the investigation, making it difficult to elucidate the effects of ground reaction force relating to the different postures. Hicks et al. [23] showed that deformities such as tibial torsion in patients with cerebral palsy reduces the capacity of the muscles to extend the hip and knee body during the single limb of stance phase. Future studies could include these skeletal deformities in the musculoskeletal model to verify the trends seen from this study across postures during stance phase of gait. Third, several of our postures were interpolated to find gait data between crouched and normal gait. We also extrapolated some additional postures to look at gait even more severe than crouched. About 80% of our postures, however, were within 1 standard deviation from the mean joint angle of crouched or upright gait. All of our postures’ joint angles were within 2 standard deviations. Finally, the arms in our musculoskeletal model were omitted due to the lack of an upper extremity model with muscles. However, the mass properties of the arms were included in the torso. In a running simulation [24], the arms accounted for less than 1% of both the maximum horizontal and vertical mass center acceleration and therefore its contribution to propulsion and support were minimal.
Despite these challenges, we can draw several conclusions from this study. First, the overall ability to generate larger ground reaction forces and force profile areas represents a mechanical advantage of a crouched posture. This advantage results from an increased capacity of muscles to generate ground reaction forces. This increase in muscle capacity while in a crouched posture may allow a patient to generate new movements to compensate for impairments associated with cerebral palsy, such as motor control deficits. Furthermore, this increase in muscle capacity to generate horizontal ground reaction forces may also rationalize the advantage an athlete gains when adopting a crouch posture in sports. This work can be implemented into future studies to study other bipedal animals, such as birds, to understand why they adopt a crouch gait versus an upright gait as in humans.
We used musculoskeletal modeling and optimization to investigate one possible advantage to crouch gait.
We placed an OpenSim gait model in 45 different postures from upright to crouch during the stance phase.
We maximizedhorizontal ground reaction forces in 8 compass directions (e.g., force profile) by adjusting muscle forces.
The largest force profile areaswere found for postures from mild crouch ( in initial stance) to crouch (infinal stance).
The ability to generate largeforce profiles represents a mechanical advantage of a dopting a crouched posture.
Acknowledgments
We are grateful to Scott Delp, Ajay Seth, and Jennifer Hicks for helpful discussions. This research was supported by The University of Tennessee, Knoxville and NIH roadmap for Medical Research U54 GM072 970.
Footnotes
Conflict of Interest
We do not have any financial or personal relationships with other people or organizations that could inappropriately influence our manuscript entitled “Posture Influences Ground Reaction Force: Implications for Crouch Gait,” which is being submitted as an original article to Gait & Posture.
Publisher's Disclaimer: This is a PDF file of an unedited manuscript that has been accepted for publication. As a service to our customers we are providing this early version of the manuscript. The manuscript will undergo copyediting, typesetting, and review of the resulting proof before it is published in its final citable form. Please note that during the production process errors may be discovered which could affect the content, and all legal disclaimers that apply to the journal pertain.
References
- 1.Wren TAL, Rethlefsen S, Kay RM. Prevalence of specific gait abnormalities in children with cerebral palsy: Influence of cerebral palsy subtype, age, and previous surgery. Journal of Pediatric Orthopedics. 2005;25:79–83. doi: 10.1097/00004694-200501000-00018. [DOI] [PubMed] [Google Scholar]
- 2.Rose J, Gamble JG, Medeiros J, Burgos A, Haskell WL. Energy cost of walking in normal children and in those with cerebral palsy: Comparison of heart rate and oxygen uptake. Journal of Pediatric Orthopedics. 1989;9:276–279. [PubMed] [Google Scholar]
- 3.Rose J, Gamble JG, Burgos A, Medeiros J, Haskell WL. Energy expenditure index of walking for normal children and for children with cerebral palsy. Developmental Medicine and Child Neurology. 1990;32:333–340. doi: 10.1111/j.1469-8749.1990.tb16945.x. [DOI] [PubMed] [Google Scholar]
- 4.Jahnsen R, Villien L, Aamodt G, Stanghelle JK, Holm I. Musculoskeletal pain in adults with cerebral palsy compared with the general population. Journal of Rehabilitation Medicine: Official Journal of the UEMS European Board of Physical and Rehabilitation Medicine. 2004;36:78–84. doi: 10.1080/16501970310018305. [DOI] [PubMed] [Google Scholar]
- 5.Bell KJ, Ounpuu S, DeLuca PA, Romness MJ. Natural progression of gait in children with cerebral palsy. Journal of Pediatric Orthopedics. 2002;22:677–682. [PubMed] [Google Scholar]
- 6.Honeycutt A, Dunlap L, Chen H, Homsi Ga, Grosse S, Schendel D. Economic costs associated with mental retardation, cerebral palsy, hearing loss, and vision impairment --- united states, 2003. Morbidity and Mortality Weekly Report. 2004;53:57–59. [PubMed] [Google Scholar]
- 7.Ross SA, Engsberg JR. Relationships between spasticity, strength, gait, and the gmfm-66 in persons with spastic diplegia cerebral palsy. Archives of Physical Medicine and Rehabilitation. 2007;88:1114–1120. doi: 10.1016/j.apmr.2007.06.011. [DOI] [PubMed] [Google Scholar]
- 8.Hoffinger SA, Rab GT, Abou-Ghaida H. Hamstrings in cerebral palsy crouch gait. Journal of Pediatric Orthopedics. 1993;13:722–726. doi: 10.1097/01241398-199311000-00006. [DOI] [PubMed] [Google Scholar]
- 9.McNee AE, Shortland AP, Eve LC, Robinson RO, Gough M. Lower limb extensor moments in children with spastic diplegic cerebral palsy. Gait & Posture. 2004;20:171–176. doi: 10.1016/j.gaitpost.2003.08.009. [DOI] [PubMed] [Google Scholar]
- 10.Arnold AS, Anderson FC, Pandy MG, Delp SL. Muscular contributions to hip and knee extension during the single limb stance phase of normal gait: A framework for investigating the causes of crouch gait. Journal of Biomechanics. 2005;38:2181–2189. doi: 10.1016/j.jbiomech.2004.09.036. [DOI] [PubMed] [Google Scholar]
- 11.Gage JR, Schwartz MH. Pathological gait and lever-arm dysfunction. The treatment of gait problems in cerebral palsy. 2004:180–204. [Google Scholar]
- 12.Gage JR, Schwartz MH. Dynamic deformities and lever arm considerations. Principles of deformity. 2001:761–775. [Google Scholar]
- 13.Zajac FE. Muscle and tendon: Properties, models, scaling, and application to biomechanics and motor control. Critical Reviews in Biomedical Engineering. 1989;17:359–411. [PubMed] [Google Scholar]
- 14.Kepple TM, Sommer HJ, 3rd, Lohmann Siegel K, Stanhope SJ. A three-dimensional musculoskeletal database for the lower extremities. Journal of Biomechanics. 1998;31:77–80. doi: 10.1016/s0021-9290(97)00107-3. [DOI] [PubMed] [Google Scholar]
- 15.Riley PO, Kerrigan DC. Kinetics of stiff-legged gait: Induced acceleration analysis. IEEE Transactions on Rehabilitation Engineering: A Publication of the IEEE Engineering in Medicine and Biology Society. 1999;7:420–426. doi: 10.1109/86.808945. [DOI] [PubMed] [Google Scholar]
- 16.Kimmel SA, Schwartz MH. A baseline of dynamic muscle function during gait. Gait & Posture. 2006;23:211–221. doi: 10.1016/j.gaitpost.2005.02.004. [DOI] [PubMed] [Google Scholar]
- 17.Hicks JL, Schwartz MH, Arnold AS, Delp SL. Crouched postures reduce the capacity of muscles to extend the hip and knee during the single-limb stance phase of gait. Journal of Biomechanics. 2008;41:960–967. doi: 10.1016/j.jbiomech.2008.01.002. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 18.Delp SL, Anderson FC, Arnold AS, Loan P, Habib A, John CT, Guendelman E, Thelen DG. Opensim: Open-source software to create and analyze dynamic simulations of movement. IEEE Transactions on Bio-Medical Engineering. 2007;54:1940–1950. doi: 10.1109/TBME.2007.901024. [DOI] [PubMed] [Google Scholar]
- 19.Anderson FC, Pandy MG. Individual muscle contributions to support in normal walking. Gait & Posture. 2003;17:159–169. doi: 10.1016/s0966-6362(02)00073-5. [DOI] [PubMed] [Google Scholar]
- 20.Arnold AS, Liu MQ, Schwartz MH, Ounpuu S, Delp SL. The role of estimating muscle-tendon lengths and velocities of the hamstrings in the evaluation and treatment of crouch gait. Gait & Posture. 2006;23:273–281. doi: 10.1016/j.gaitpost.2005.03.003. [DOI] [PubMed] [Google Scholar]
- 21.Anderson FC, Pandy MG. Static and dynamic optimization solutions for gait are practically equivalent. Journal of Biomechanics. 2001;34:153–161. doi: 10.1016/s0021-9290(00)00155-x. [DOI] [PubMed] [Google Scholar]
- 22.Novacheck TF, Trost JP, Sohrweide S. Examination of the child with cerebral palsy. The Orthopedic Clinics of North America. 2010;41:469–488. doi: 10.1016/j.ocl.2010.07.001. [DOI] [PubMed] [Google Scholar]
- 23.Hicks J, Arnold A, Anderson F, Schwartz M, Delp S. The effect of excessive tibial torsion on the capacity of muscles to extend the hip and knee during single-limb stance. Gait & Posture. 2007;26:546–552. doi: 10.1016/j.gaitpost.2006.12.003. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 24.Hamner SR, Seth A, Delp SL. Muscle contributions to propulsion and support during running. Journal of Biomechanics. 2010;43:2709–2716. doi: 10.1016/j.jbiomech.2010.06.025. [DOI] [PMC free article] [PubMed] [Google Scholar]