

Abstract
Interactions among living organisms, from bacteria colonies to human societies, are inherently more complex than interactions among particles and non-living matter. Group interactions are a particularly important and widespread class, representative of which is the public goods game. In addition, methods of statistical physics have proved valuable for studying pattern formation, equilibrium selection and self-organization in evolutionary games. Here, we review recent advances in the study of evolutionary dynamics of group interactions on top of structured populations, including lattices, complex networks and coevolutionary models. We also compare these results with those obtained on well-mixed populations. The review particularly highlights that the study of the dynamics of group interactions, like several other important equilibrium and non-equilibrium dynamical processes in biological, economical and social sciences, benefits from the synergy between statistical physics, network science and evolutionary game theory.
Keywords: cooperation, public goods, pattern formation, self-organization, coevolution
1. Introduction
We present a review of recent advances in the evolutionary dynamics of spatial games that are governed by group interactions. The focus is on the public goods game, or more generally N-player games, which are representative for this type of interaction. Although relevant aspects of two-player games are surveyed as well, we refer to Nowak [1] for a more thorough exposition. Another important aspect of this review is its focus on structured populations. In the continuation of this introductory section, we will also summarize basic results concerning the public goods game on well-mixed populations, but we refer the reader to Sigmund [2] and Archetti & Scheuring [3] for details.
The methodological perspective that permeates throughout the review is that of statistical physics. The advances reviewed therefore ought to be of interest to physicists who are involved in the interdisciplinary research of complex systems, but hopefully also to experts on game theory, sociology, computer science, ecology, as well as evolution and modelling of socio-technical systems in general. Group interactions are indeed inseparably linked with our increasingly interconnected world, and thus lie at the interface of many different fields of research. We note that there are many studies that are not covered in this review. However, we have tried to make it as comprehensive as possible to facilitate further research.
We describe our motivation, notation and other elementary concepts in §1.1, followed by an ‘in a nutshell’ survey of results on well-mixed populations in §1.2 and an overview of the organization of the review in §1.3.
1.1. Motivation and basic concepts
Given that fundamental interactions of matter are of pairwise nature, the consideration of N-particle interactions in traditional physical systems is relatively rare. In computational approaches aimed at modelling social, economical and biological systems, however, where the constituents are neither point mass particles nor magnetic moments, N-player interactions are almost as fundamental as two-player interactions. Most importantly, group interactions, in general, cannot be reduced to the corresponding sum of pairwise interactions.
A simple model inspired by experiments [4–10] can be invoked both for motivating the usage of the public goods game as well as for introducing basic notation. Consider a colony of N microbial agents where a fraction of them (producers or cooperators) pour amounts of a fast diffusive chemical into the environment. The latter has the status of a public good as it is beneficial also for those that do not produce it (free-riders or defectors). For N = 3, such a set-up is depicted schematically in figure 1. The metabolic expenses stemming from the production cost of the public good are given by the cost function α(ρC), whereas the individual benefit for each of the N microbes is β(ρC), where 0 ≤ ρC ≤ 1 is the fraction of producers. Each non-producing (D-phenotype) microbe thus receives the pay-off PD = β(ρC), whereas each microbe that does produce (C-phenotype) bears the additional cost, so that its net benefit is PC = β(ρC)−α(ρC).
Figure 1.
Schematic of N = 3 microbes, where fractions  are cooperators (producers) and
are cooperators (producers) and  are defectors (free-riders). For the most popular choice of benefit and cost functions, β(ρC) = rρC (r > 1) and α(ρC) = 1, respectively, individual pay-offs are
are defectors (free-riders). For the most popular choice of benefit and cost functions, β(ρC) = rρC (r > 1) and α(ρC) = 1, respectively, individual pay-offs are  and
and  . An explicit computation of PC (ρC) (
. An explicit computation of PC (ρC) ( ) and PD(ρC) (
) and PD(ρC) ( ) reveals that they cannot be generated by means of pairwise interactions, thus illustrating the inherent irreducibility of group interactions.
) reveals that they cannot be generated by means of pairwise interactions, thus illustrating the inherent irreducibility of group interactions.
For N = 2 and the simple choice of α(ρC) = c/(2ρC) and β(ρC) = bθ (ρC) (where θ (x) is the step function), we recover two well-known games that are governed by pairwise interactions. Namely the prisoner's dilemma for 2b > c > b > 0 and the snowdrift game for b > c > 0, as summarized in table 1.
Table 1. Pay-off matrix of two-player games if α = c/(2ρC) and β = θ(ρC)b. For 2b > c > b > 0 we have the prisoner's dilemma, and for b > c > 0 the snowdrift game.
| C | D | |
|---|---|---|
| C | R = b−(c/2) | S = b−c |
| D | T = b | P = 0 |
When N ≥ 3, however, the problem becomes that of group interactions. We see that, under the sensible assumption of additivity of individually obtained pay-offs, the defined pay-off structure cannot be reproduced by means of pairwise interactions (see caption of figure 1 for details). This example also suggests that, provided the benefit and cost functions could be inferred from experiments, the experimenter could potentially determine whether a colony is governed by pair or group interactions. Indeed, it was recently noted [3] that the oversimplifying restriction of pairwise social interactions has dominated the interpretation of many biological data that would probably be much better interpreted in terms of group interactions.
The pay-offs PD = β(ρC) and PC = β(ρC) − α(ρC) have a general public goods game structure in that cooperators bear an additional cost besides the benefits that are common to both strategies. The analysis of decision-making by a ‘rational microbe’ thus falls within the realm of classical game theory. In this framework, for a constant individual production cost α and an arbitrary concave benefit function β(ρC), Motro [11] showed that even values from within the 0 < ρC < 1 interval are stable Nash equilibria. Under certain conditions to be met by the benefit and cost functions (β and α), there is thus no ‘tragedy of the commons’ [12]. This may be welcome news for the liberal (‘invisible hand’) supporters of public goods systems: the tragedy of the commons is rationally avoidable even without the ‘cognitive’ or ‘normative’ capacities required for the existence of additional strategies. Nevertheless, the ‘tragedy of the commons’ does occur in the majority of other cases (e.g. linear benefit function β), where no production of the public good is the only rational individual choice.
1.2. Evolutionary game dynamics
Turning back to microbial populations, under the assumption that the reproductive power of each microbe is proportional to the net metabolic benefit enjoyed, one arrives at a formal description for the time evolution of the fraction of producers ρC. This is the realm of evolutionary game dynamics that implements Darwinian natural selection of phenotypes in populations under frequency-dependent fitness conditions [1,2,13,14], as well as in related though non-genetic social and economic systems. In the latter, ‘social learning’ assumptions may lead to a very similar evolutionary dynamics provided simple assumptions concerning the cognitive capabilities of agents are accepted.
A calculation that invokes a standard well-mixed population setting (see below and references [3,15,16]) leads to the differential equation for the expected value x = 〈ρC〉 of the fraction of producers
| 1.1 |
where WC,D(x) is the average pay-off per either a cooperative or a defective individual. This is the replicator equation, which is nonlinear already for linear pay-offs. Depending further on the additional properties of α(x) and β(x), its analysis may thus be all but straightforward.
Theorems relate the asymptotic states of the replicator equation with Nash's stability criteria, and Motro's [11] results on the public goods game, in turn, translate into the characterization of the evolutionary stable states for our microbial population. In particular, for constant α and concave benefit functions β(x), a well-mixed colony of mixed phenotypic composition is evolutionarily stable. Notably, in addition to the replicator dynamics, best-response and related learning dynamics can also be formulated for the evolution of x, and indeed they can be of much relevance in specific contexts of agent-based modelling.
At this point, it is informative to spell out the operational assumptions that traditionally underlie the well-mixed approximation [3]. In particular, it is assumed that the N − 1 individuals that interact with the focal player are randomly sampled from an infinite population of cooperators and defectors, so that the probability of interacting with j cooperators is given by fj(x) = CjN−1xj(1−x)N−1−j, where x(1−x) is the average fraction of cooperators (defectors). Other formally more sophisticated settings can also be of interest. We refer to Cressman et al. [16] for one that allows us to consider a continuum of strategies parametrized by the amount of public good produced per individual, and to Peña [17] for a ‘grand canonical’ treatment where the group size N is considered a random variable.
Note that the pay-offs of the focal individual are collected from group configurations that are statistically uncorrelated. Moreover, in order to implement the assumption that the individual reproductive power is proportional to the net benefits, while operationally keeping a constant population size N, one can (among other options, such as using the stochastic birth/death Moran process) use a replicator-like rule in which, in the next time step, the focal player imitates the current strategy of a randomly chosen agent from the group, with a probability depending on the pay-off difference. It is worth emphasizing that the basic underlying assumption here is homogeneity, so that individuals do not differentiate or assort, as both (i) the pay-offs are collected from and (ii) the competitive reproduction is against configurations sampled from an unbiased (uncorrelated) strategic distribution fj(x).
If we are departing from the assumptions of well-mixed populations, however, then several issues open up. To begin with:
— Which criterion determines how group configurations are sampled to provide instantaneous pay-off to focal players? Is the group size N also a random variable in that sampling?
— What kind of population sampling is used to implement replicating competition among strategies? In other words, who imitates whom? Should members of all groups be potential imitators (or should potentially be imitated)? Or should just a fraction of them (for example those in a smaller spatial neighbourhood of the focal player) qualify as such?
There are several possible answers to both groups of questions, and they depend significantly on the particular problem one wishes to address. For example, for a quantitative modelling of a yeast colony of invertase producers and non-producing cells, the answers should be based on considerations involving characteristic time scales of many biochemical processes and the spatial microbial arrangements that are typical among the measured samples of the microbial colony, to name but a few potentially important issues. On the other hand, in systems where best-response or other non-imitative evolutionary rules are considered, only the first group of questions would be likely to be of relevance.
Recent research concerning public goods games on structured populations is in general very indirectly, if at all, related to a particular experimental set-up. Instead, it is of an exploratory nature over different potentially relevant theoretical issues that can be either formulated or understood as lattice or network effects. A quite common ground motivation is the search for analogues of network reciprocity [18]. Is the resilience of cooperative clusters against invading defectors on networks and lattices enough to effectively work against the mean-field tendencies [19]? More generally, what are the effects of structure in a population when confluent with known sources of public goods sustainability, such as punishment or reward? Are these synergistic confluences? Indeed, the interest of reviewed research goes far beyond its relevance to a specific experiment. Evolutionary game dynamics is of fundamental interest to the making of interdisciplinary complex systems science, encompassing biological, economical as well as social sciences and, from this wider perspective, the universal features of dynamical processes of group interactions are still rather unexplored.
1.3. Organization of the review
The remainder of this review is organized as follows. In §2, we survey the implementation of the public goods game on lattices. We focus on recent studies investigating the effects of lattice structure on the emergence of cooperation. In addition, we review both the effects of heterogeneity in the dynamical ingredients of the public goods game as well as the effects of strategic complexity on the evolution of cooperation. In §3, we focus on structures that are more representative for human societies. In this framework, we will revisit the formulation of the public goods game on complex networks and show how social diversity promotes cooperation. In addition, we will survey how public goods games on networks can be formulated by means of a bipartite representation. The latter includes both social as well as group structure, thus opening the path towards a more accurate study of group interactions in large social systems. We conclude §3 by reviewing different networked structures in which the public goods game has been implemented, most notably modular and multiplex networks, as well as populations of mobile agents. In §4, we review advances on structured populations where the connections coevolve with the evolutionary dynamics, and where thus the topology of interactions changes depending on the pay-offs and strategies in the population. We round off the review by discussing the main perspectives, challenges and open questions in §5, and by summarizing the conclusions in §6.
2. Lattices
Beyond patch-structured populations where under certain updating rules the spatial structure has no effect on the evolution of altruism [20–22], lattices represent very simple topologies, which enjoy remarkable popularity in game theoretical models [18,23,24]. Despite their dissimilarity to actual social networks [25], they provide a very useful entry point for exploring the consequences of structure on the evolution of cooperation. Moreover, there are also realistic systems, especially in biology and ecology, where the competition between the species can be represented adequately by means of a lattice [26,27]. In general, lattices can be regarded as an even field for all competing strategies where the possibility of network reciprocity is given [18]. Furthermore, as there are many different types of lattices (see figure 2 for details), we can focus on very specific properties of group interactions and test what is their role in the evolutionary process.
Figure 2.
Schematic of different types of lattices. On the (a) square lattice, each player has four immediate neighbours, thus forming groups of size G = 5, whereas on the (b) honeycomb lattice, it has three, thus G = 4. In both cases, the clustering coefficient 𝒞 is zero. Yet, the membership of unconnected players in the same groups introduces effective links between them, which may evoke behaviour that is characteristic for lattices with closed triplets [28]. On the other hand, (c) the kagomé and (d) the triangular lattice both feature percolating overlapping triangles, which makes them less susceptible to effects introduced by group interactions. The kagomé lattice has G = 5 and  , whereas the triangular lattice has
, whereas the triangular lattice has  and G = 7.
and G = 7.
The basic set-up for a public goods game with cooperators and defectors as the two competing strategies on a lattice can be described as follows. Initially,  players are arranged into overlapping groups of size G such that everyone is surrounded by its k = G−1 neighbours and belongs to g = G different groups, where L is the linear system size and k the degree (or coordination number) of the lattice. Each player on site i is designated as either a cooperator (C) si = 1 or a defector (D) si = 0 with equal probability. Cooperators contribute a fixed amount a, normally considered being equal to 1 without loss of generality, to the common pool while defectors contribute nothing. Finally, the sum of all contributions in each group is multiplied by the synergy factor r and the resulting public goods are distributed equally among all the group members. The pay-off of player i in every group g is
players are arranged into overlapping groups of size G such that everyone is surrounded by its k = G−1 neighbours and belongs to g = G different groups, where L is the linear system size and k the degree (or coordination number) of the lattice. Each player on site i is designated as either a cooperator (C) si = 1 or a defector (D) si = 0 with equal probability. Cooperators contribute a fixed amount a, normally considered being equal to 1 without loss of generality, to the common pool while defectors contribute nothing. Finally, the sum of all contributions in each group is multiplied by the synergy factor r and the resulting public goods are distributed equally among all the group members. The pay-off of player i in every group g is
| 2.1 |
where NgC is the number of cooperators in group g. The net pay-off i thereby acquires is the sum of the pay-offs received in all the groups it participates in:  .
.
The microscopic dynamics involves the following elementary steps. First, a randomly selected player i plays the public goods game as a member of all the g = 1, … ,G groups. Next, player i chooses one of its neighbours at random, and the chosen player j also acquires its pay-off Pj in the same way. Finally, player i enforces its strategy si onto player j with some probability determined by their pay-off difference. One of the possible choices for this update probability is the Fermi function,
| 2.2 |
where K quantifies the uncertainty by strategy adoptions, and G normalizes it with respect to the number and size of the groups. These elementary steps are repeated consecutively, whereby each full Monte Carlo step (MCS) gives a chance for every player to enforce its strategy onto one of the neighbours once on average. Alternatively, synchronous updating can also be applied so that all the players play and update their strategies simultaneously, but the latter can lead to spurious results, especially in the deterministic K → 0 limit [29]. Likewise, as anticipated above, there are several ways of how to determine when a strategy transfer ought to occur, yet, for lattices, the Fermi function can be considered standard as it can easily recover both the deterministic as well as the stochastic limit. The average fraction of cooperators ρC and defectors ρD in the population must be determined in the stationary state. Depending on the actual conditions, such as the proximity to extinction points and the typical size of the emerging spatial patterns, the linear system size has to be between L = 200 and 1600 in order to avoid accidental extinction, and the relaxation time has to exceed anywhere between 104 and 106 MCSs to ensure that the stationary state is reached. Exceptions to these basic requirements are not uncommon, especially when considering more than two competing strategies, as we will emphasize at the end of this section.
2.1. Group versus pairwise interactions
For games governed by pairwise interactions, such as the prisoner's dilemma game, the dependence of the critical temptation to defect bc on K is determined by the presence of overlapping triangles. Notably, here bc is the temptation to defect b above which cooperators are unable to survive (see also table 1). If an interaction network lacks overlapping triangles, and accordingly has the clustering coefficient 𝒞 = 0, as is the case for the square and the honeycomb lattices, then there exists an intermediate K at which bc is maximal. On the other hand, if overlapping triangles percolate, as is the case for the triangular and the kagomé lattices (figure 2), then the deterministic limit K → 0 is optimal for the evolution of cooperation [30,31]. The spatial public goods game behaves differently, highlighting that group interactions are more than just the sum of the corresponding number of pairwise interactions. As demonstrated in Szolnoki et al. [28], group interactions introduce effective links between players who are not directly connected by means of the interaction network. Topological differences between lattices therefore become void, and the deterministic limit K → 0 becomes optimal for the evolution of cooperation, regardless of the type of the interaction network. Results for pairwise and group interactions are summarized in figure 3. This implies that by group interactions the uncertainty by strategy adoptions plays at most a side role, as it does not influence the outcome of the evolutionary process in a qualitative way.
Figure 3.
Borders between the mixed C+D and the pure D phase in dependence on the normalized uncertainty by strategy adoptions K/G, as obtained on different lattices for (a) pairwise and (b) group interactions. Vertical axis depicts the defection temptation rate, i.e. the higher its value the smaller the value of r that still allows the survival of at least some cooperators. By pairwise interactions (G = 2), the absence of overlapping triangles is crucial (square and honeycomb lattices), as then there exists an intermediate value of K at which the evolution of cooperation is optimally promoted. If triangles do percolate (triangular lattice), the K → 0 limit is optimal. This behaviour is characteristic for all social dilemmas that are based on pairwise games, the most famous examples being the prisoner's dilemma and the snowdrift game (see figs 3 and 5 in Szabó et al. [30]). Conversely, when group interactions are considered (see figure 2 for G values) the topological differences between the lattices become void. Accordingly, the deterministic K → 0 limit is optimal, regardless of the topology of the host lattice [28].
The fact that membership in the same groups effectively connects players who are not linked by means of direct pairwise links naturally brings forth the group size as a key system parameter. In Szolnoki & Perc [32], it was shown that increasing the group size does not necessarily lead to mean-field behaviour, as is traditionally observed for games governed by pairwise interactions [33], but rather that public cooperation may be additionally promoted by means of enhanced spatial reciprocity that sets in for very large groups where individuals have the opportunity to collect pay-offs separately from their direct opponents. However, very large groups also offer very large benefits to invading defectors, especially if they are rare, and it is this back door that limits the success of large groups to sustain cooperation and limits the pure number-in-the-group effect [34]. Figure 4 features two characteristic snapshots and further details to that effect. It is also worth emphasizing that the joint membership in large groups will indirectly link vast numbers of players, thus rendering local as well global structural properties of interaction networks practically irrelevant for the final outcome of the public goods game.
Figure 4.
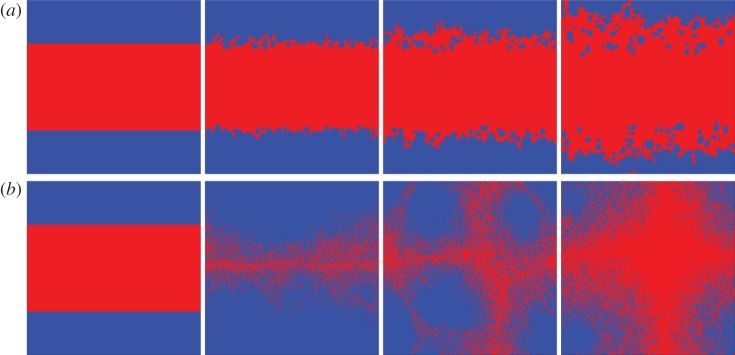
Characteristic snapshot of the evolutionary process for (a) small (G = 5) and (b) large (G = 301) groups. Cooperators are depicted by blue, whereas defectors are depicted by red. For small groups, the evolution of strategies proceeds with the characteristic propagation of the fronts of the more successful strategy (in this case D) until eventually the maladaptive strategy C goes extinct. For large groups, however, the cooperative clusters are strong and can outperform the defectors, even if r is very small. Still, as the density of defectors decreases, their pay-off suddenly becomes very competitive, and thus they can invade the seemingly invincible cooperative clusters. Such an alternating time evolution is completely atypical and was previously associated only with cooperators.
2.2. Heterogeneities in the dynamics
Group interactions on structured populations are thus different from the corresponding sum of pairwise interactions. Consequently, not just the group size, but also the distribution of pay-off within the groups becomes important. As shown in Shi et al. [35] and Perc [36], heterogeneous pay-off distributions do promote the evolution of cooperation in the public goods game, yet, unlike games governed by pairwise interactions [37], uniform distributions outperform the more heterogeneous exponential and power law distributions. The set-up may also be reversed in that not the pay-offs but rather the contributions to the groups are heterogeneous. In Gao et al. [38] and Vukov et al. [39], it was shown that correlating the contributions with the level of cooperation in each group markedly promotes prosocial behaviour, although the mechanism may fail to deliver the same results on complex interaction networks where the size of groups is not uniform. Conceptually similar studies with likewise similar conclusions have also been described [40–42], although they rely on differences in the degree of each player to determine pay-off allocation. The latter will be reviewed in §3 where the focus is on public goods games that are staged on complex networks. Another possibility to introduce heterogeneity to the spatial public goods game is by means of different teaching activities of players, as was conducted in Guan et al. [43]. In this case, however, the results are similar to those reported previously for games governed by pairwise interactions [44], in that there exists an optimal intermediate density of highly active players at which cooperation thrives best.
Aside from heterogeneous distributions of pay-offs and initial investments, group interactions are also amenable to different public benefit functions, as demonstrated in figure 5. While traditionally it is assumed that the production of public goods is linearly dependent on the number of cooperators within each group, it is also possible to use more complex benefit functions. The idea has been explored already in well-mixed populations [15,45–47], and in structured populations, the possibilities are more. One is to introduce a critical mass of cooperators that have to be present in a group in order for the collective benefits of group membership to be harvested [48]. If the critical mass is not reached, the initial contributions can either go to waste or they can also be depreciated by applying a smaller multiplication factor in that particular group [49,50]. Although such models inevitably introduce heterogeneity in the distribution of pay-offs [51], they can also lead to interesting insights that go beyond ad hoc introduced heterogeneity. In Szolnoki & Perc [48], for example, it was shown that a moderate fraction of cooperators can prevail even at very low multiplication factors if the critical mass M is minimal. For larger multiplication factors, however, the level of cooperation was found to be the highest at an intermediate value of M. Figure 6 features two characteristic scenarios. Notably, the usage of nonlinear benefit functions is unique to group interactions, and in general it works in favour of public cooperation [49,50].
Figure 5.
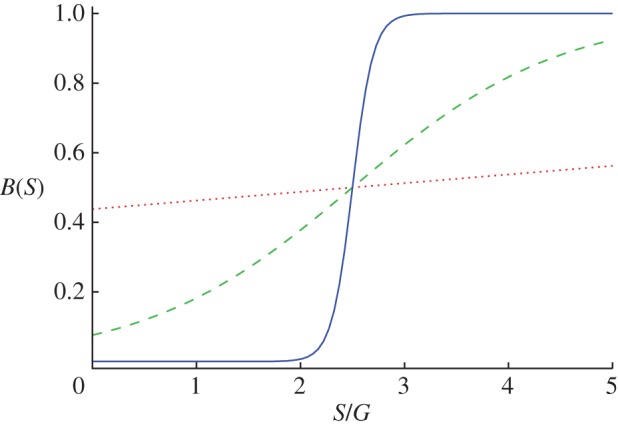
Different realizations of the public benefit function B(S) = 1/(1 + exp[−β(Si−T)]), where T represents the threshold value and β is the steepness of the function [45]. For β = 0, the benefit function is a constant equalling 0.5, in which case the produced public goods are insensitive to the efforts of group members. Conversely, for β = +∞, the benefit function becomes step-like so that group members can enjoy the benefits of collaborative efforts via r only if the total amount of contributions in the group S exceeds a threshold. Otherwise, they obtain nothing. The depicted curves were obtained for T = 2.5 and β = 0.1 (dotted red), 1 (dashed green) and 10 (solid blue).
Figure 6.
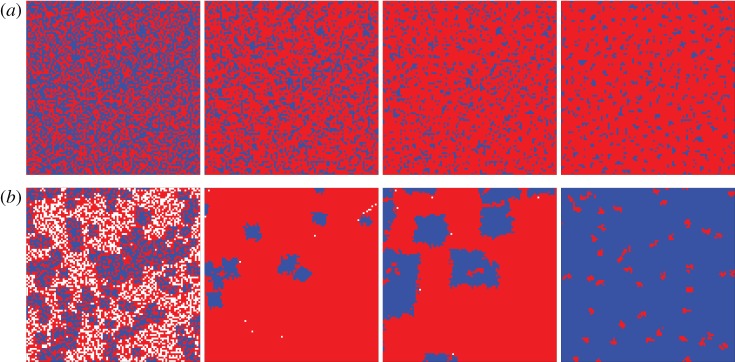
Time evolution of strategies on a square lattice having G = 25, for the critical mass (a) M = 2 and (b) M = 17 at r/G = 0.6 [48]. Defectors are marked by red, whereas cooperators are depicted by blue if their initial contributions are exalted or white if they go to waste. Accordingly, cooperators can be designated as being either ‘active’ or ‘inactive’. When M is low all cooperators are active, yet they do not have a strong incentive to aggregate because an increase in their density will not elevate their fitness. Hence, only a moderate fraction of cooperators coexists with the prevailing defectors in the stationary state. If the critical mass is neither small nor large, the status of cooperators varies depending on their location on the lattice: there are places where their local density exceeds the threshold and they can prevail against defectors. There are also places where the cooperators are inactive because their density is locally insufficient and loose against defectors. The surviving domains of active cooperators start spreading, ultimately rising to near dominance.
2.3. Strategic complexity
Besides heterogeneity in pay-offs and nonlinearity in public benefit functions, introducing strategic complexity is another way of bringing the public goods game closer to reality. As noted above, the willingness to cooperate may depend on the behaviour of others in the group. Correlating the contributions with either the level of cooperation in each group [38,39] or the degree of players [40–42] can thus be seen not just as heterogeneous contributing, but also as conditional cooperation [52]. An explicit form of this was studied in Szolnoki & Perc [53], where a conditional cooperator of the type Cj only cooperate provided there are at least j other cooperators in the group. It was shown that such strategies are the undisputed victors of the evolutionary process, even at very low synergy factors. Snapshots of the spatial grid reveal the spontaneous emergence of convex isolated ‘bubbles’ of defectors that are contained by inactive conditional cooperators. While the latter will predominantly cooperate with the bulk of active conditional cooperators, they will certainly defect in the opposite direction, where there are defectors. Consequently, defectors cannot exploit conditional cooperators, which leads to a gradual but unavoidable shrinkage of the defector quarantines. Notably, conditional strategies introduced in this way have no impact on the mixed state in unstructured populations and are thus of interest only on structured populations.
Apart from conditional strategies, the impact of loners, sometimes referred to as volunteers, has also been studied in the realm of the spatial public goods game [54]. While in well-mixed populations volunteering leads to cyclic dominance between the three competing strategies [55,56], on lattices, the complexity of the emerging spatial patterns enables the observation of phase transitions between one-, two- and three-strategy states [54], which either fall in the directed percolation universality class [57] or show interesting analogies to Ising-type models [58].
The complexity of solutions in spatial public goods games with three or more competing strategies is indeed fascinating, which can be corroborated further by results reported recently for peer-punishment [59–61], pool-punishment [62,63], the competition between both [64] and for reward [65]. In general, the complexity is largely due to the spontaneous emergence of cycling dominance between the competing strategies, which can manifest in strikingly different ways. By pool-punishment, for example, if the value of r is within an appropriate range [62], then the pool-punishers can outperform defectors, who in turn outperform cooperators, who in turn outperform the pool-punishers, thus closing the loop of dominance. Interestingly, in the absence of defectors, peer-punishers and pure cooperators receive the same pay-off, and hence their evolution becomes equivalent to that of the voter model [58]. Notably however, the logarithmically slow coarsening can be effectively accelerated by adding defectors via rare random mutations [61]. Similarly, complex solutions can be observed for rewarding [65]. There, if rewards are too high, defectors can survive by means of cyclic dominance, but, in special parameter regions, rewarding cooperators can prevail over cooperators through an indirect territorial battle with defectors, qualitatively identical to those reported for peer-punishment [59]. Figure 7 features two sequences of snapshots that demonstrate both evolutionary scenarios. Altogether, these results indicate that second-order free-riding [67,68], referring to cooperators who refrain from either punishing or rewarding, finds a natural solution on structured populations that is due to pattern formation. The aptness of structured populations for explaining the stability and effectiveness of punishment can, in fact, be upgraded further by means of coevolution [69], as we will review in §4. On the contrary, while experiments attest to the effectiveness of both punishment [70] and reward [71] for elevating collaborative efforts, the stability of such actions in well-mixed populations is rather elusive, as reviewed comprehensively in Sigmund [72].
Figure 7.
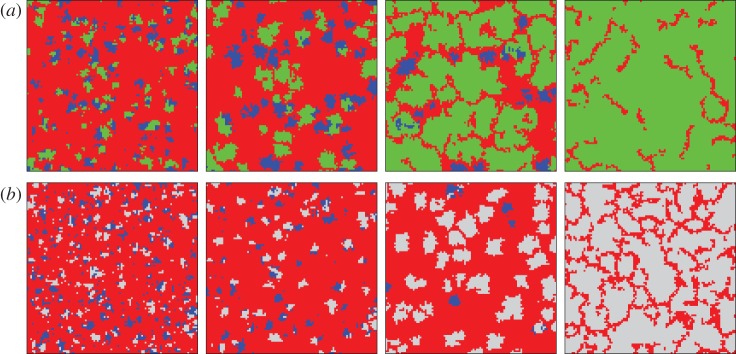
Indirect territorial battle between (a) pure cooperators (blue) and peer-punishers (green), and between (b) pure cooperators (blue) and rewarding cooperators (light grey). In (a), pure cooperators and peer-punishers form isolated clusters that compete against defectors (red) for space on the square lattice. Because peer-punishers are more successful in competing against defectors than pure cooperators (also frequently referred to as second-order free-riders [66]), eventually the latter die out to a leave a mixed two-strategy phase (peer-punishers and defectors) as a stationary state (see Helbing et al. [59] for further details). In (b), defectors are quick to claim supremacy on the lattice, yet pure and rewarding cooperators both form isolated compact clusters to try and prevent this. While rewarding cooperators can outperform defectors, pure cooperators cannot. Accordingly, the latter die out, leaving qualitatively the same outcome as depicted in (a) (see Szolnoki & Perc [65] for further details).
2.4. Statistical physics: avoiding pitfalls
Before concluding this section and devoting our attention to more complex interaction networks and coevolutionary models, it is important to emphasize difficulties and pitfalls that are frequently associated with simulations of three or more competing, possibly cyclically dominating, strategies on structured populations. Here, methods of statistical physics, in particular that of Monte Carlo simulations [58,73,74], are invaluable for a correct treatment. Foremost, it is important to choose a sufficiently large system size and to use long enough relaxation times. If these conditions are not met, then the simulations can yield incorrect one- and/or two-strategy solutions that are unstable against the introduction of a group of mutants. For example, the homogeneous phase of cooperators or pool-punishers can be invaded completely by the offspring of a single defector inserted into the system at sufficiently low values of r [62]. At the same time, defectors can be invaded by a single group of pool-punishers (or cooperators) if initially they form a sufficiently large compact cluster. In such cases, the competition between two homogeneous phases can be characterized by the average velocity of the invasion fronts separating the two spatial solutions. Note that a system with three (or more) strategies has a large number of possible solutions, because all the solutions of each subsystem (comprising only a subset of all the original strategies) are also solutions of the whole system [23]. In such situations, the most stable solution can be deduced by performing a systematic check of stability between all the possible pairs of subsystem solutions that are separated by an interface in the spatial system. Fortunately, this analysis can be performed simultaneously if one chooses a suitable patchy structure of subsystem solutions where all relevant interfaces are present. The whole grid is then divided into several domains with different initial strategy distributions containing one, two or three strategies. Moreover, the strategy adoptions across the interfaces are initially forbidden for a sufficiently long initialization period. By using this approach, one can avoid the difficulties associated either with the fast transients from a random initial state or with the different time scales that characterize the formation of possible subsystem solutions. It is easy to see that a random initial state may not necessarily offer equal chances for every solution to emerge. Only if the system size is large enough can the solutions form locally, and the most stable one can subsequently invade the whole system. At small system sizes, however, only those solutions whose characteristic formation times are short enough can evolve. The seminal works considering punishment on structured populations [75,76], as well as the most recent anti-social punishment [77], could potentially benefit from such an approach, as it could reveal additional stable solutions beyond the well-mixed approximation [55,78–80].
3. Complex networks
With the maturity of methods of statistical physics, the availability of vast amounts of digitized data and the computational capabilities to process them efficiently, it has become possible to determine the actual contact patterns across various socio-technical networks [81–83]. These studies have shown that the degree distribution P(k) of most real-world networks is highly skewed, and that most of the time it follows a power law  [84]. The heterogeneity of degrees leads to social diversity, which has important consequences for the evolution of cooperation. Although many seminal works concerning evolutionary games on networks have focused on pairwise interactions [23,24], games governed by group interactions are rapidly gaining in popularity.
[84]. The heterogeneity of degrees leads to social diversity, which has important consequences for the evolution of cooperation. Although many seminal works concerning evolutionary games on networks have focused on pairwise interactions [23,24], games governed by group interactions are rapidly gaining in popularity.
3.1. Social heterogeneity
Owing to the overwhelming evidence indicating that social heterogeneity promotes the evolution of cooperation in pairwise social dilemma games [85–89], it is natural to ask what is its impact on games governed by group interactions. Santos et al. [90] have therefore reformulated the public goods game to be staged on complex networks. Every player i plays ki + 1 public goods games, as described before for lattices, only here the degree ki of every player can be very different. Because the groups will thus also have different size, cooperators can contribute either a fixed amount per game, ci = z, or a fixed amount per member of the group, ci = z/(ki + 1), as depicted in figure 8. Identical to the traditional set-up, the contributions within different groups are multiplied by r and accumulated. However, the pay-off of an otherwise identical player is not the same for the two different options. By defining the adjacency matrix of the network as Aij = 1 when individuals i and j are connected and Aij = 0 otherwise, we obtain the following net benefit Pi for both versions of the game:
 |
3.1 |
where, however, the precise value of ci is set depending on whether cooperators bear a fixed cost per game or a fixed cost per player. After each full round of the game, all players decide synchronously whether or not they will change their strategy. This is done by following the finite population analogue of the replicator rule. An individual i with pay-off Pi randomly selects one neighbour j among its ki contacts. If Pi ≥ Pj nothing changes, but if Pi < Pj player i adopts the strategy of the more successful neighbour j with a probability that depends on the difference ΔP = Pi−Pj.
Figure 8.
When the public goods game is staged on a complex network, cooperators can either bear a fixed cost per game, z (a), or this cost can be normalized with the number of interactions, i.e. z/(ki+1), where ki is the number of neighbours of each particular cooperator i. In the latter case, one effectively recovers a fixed cost per individual (b). This distinction has significant consequences for the evolution of public cooperation on complex interaction networks, as originally reported by Santos et al. [90]. Only if the cost is normalized with the number of neighbours does social heterogeneity significantly promote the evolution of public cooperation.
Results presented in Santos et al. [90] show that heterogeneous networks promote the evolution of public cooperation. Yet, this is particularly true when cooperators pay a fixed cost per individual. Cooperation is then viable already at η = r/(〈k〉 + 1) = 0.3 (normalized multiplication factor), which is less than half of the critical value obtained on lattices. Moreover, heterogeneous networks enable complete cooperator dominance well before cooperative behaviour even emerges on regular networks. Phenomenologically, the promotion of cooperation is due to the diversity of investments, which is a direct consequence of the heterogeneity of the underlying network. As cooperators pay a cost that depends on their degree, namely c/(k + 1), the fitness landscape becomes very rich and diverse—a feature absent for lattices. In fact, for a single public goods game, the difference between the pay-off of a cooperator and defector is no longer proportional to c, but rather inversely proportional to the number of games each player plays. This gives an evolutionary advantage to cooperative hubs, i.e. players with a high degree.
The seminal study by Santos et al. [90] motivated many others to study the evolution of public cooperation on complex networks. As evidenced by preceding works considering pairwise social dilemmas, the degree distribution is not the only property that affects the outcome of an evolutionary process [91–95]. Other properties, such as the average path length, the clustering coefficient or the presence of correlations among high-degree nodes, can be just as important [23]. Rong & Wu [96] have explored how the presence of degree correlations affects the evolution of public cooperation on scale-free networks. They found that assortative networks—those in which alike nodes are likely to be connected to each other—act detrimentally as heterogeneity no longer confers a natural advantage to cooperative hubs. Conversely, if players with dissimilar degrees are more likely connected, then the onset of cooperation occurs at lower values of r. Similarly, Rong et al. [97] have investigated the evolution of public cooperation on highly clustered heterogeneous networks, discovering that clustering has a beneficial effect on the evolution of cooperation as it favours the formation and stability of compact cooperative clusters. Yang et al. [98], on the other hand, adopted a different approach by trying to optimize the number of cooperative individuals on uncorrelated heterogeneous networks. They have considered a variation of the original model [90], in which potential strategy donors are no longer chosen randomly but rather proportionally to their degree. It was shown that the promotion of cooperation is optimal if the selection of neighbours is linearly proportional to their degree. While these results indicate that correlations are very important for the evolution of public cooperation, further explorations are needed to fully understand all the details of results presented previously [96–98], which we have here omitted.
We end this section by revisiting the role of heterogeneities in the dynamics of investments and pay-off distributions, as reviewed before in §2.2. Unlike lattices, complex networks make it interesting to correlate the degree of players with either (i) the investments they make as cooperators [40,99] or (ii) the pay-offs they are receiving from each group [41,100], or (iii) with both (i) and (ii) together [42]. These studies exploit the heterogeneity of scale-free networks to implement degree-based policies aimed at promoting cooperation. In Cao et al. [40], for example, it has been shown that positively correlating the contributions of cooperators with their degree is strongly detrimental to the evolution of public cooperation. On the other hand, if cooperators with only a few connections are those contributing the most, cooperation is promoted. An opposite relation has been established with respect to the correlations between the degrees of players and the allocation of pay-offs [41,100]. In particular, cooperation thrives if players with the highest degree receive the biggest share of the pay-off within each group. Moreover, the impact of degree-correlated aspiration levels has also been studied [101], and it was shown that a positive correlation, such that the larger the degree of a player the higher its aspiration level, promotes cooperation. Together, these results indicate that favouring hubs by either decreasing their investments or increasing their pay-offs or aspiration promotes the evolution of public cooperation, which in turn strengthens the importance of hubs as declared already in the seminal paper by Santos et al. [90].
3.2. Accounting for group structure: bipartite graphs
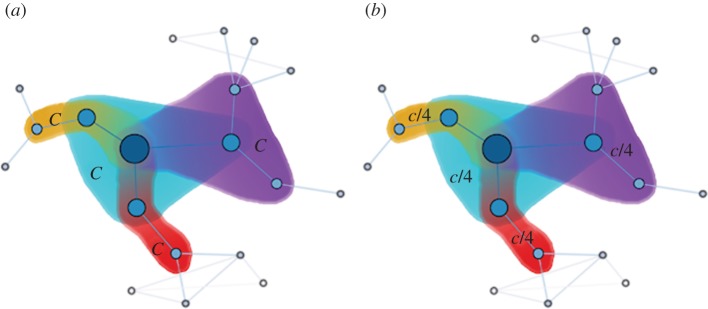
The implementation of the public goods game as introduced in Santos et al. [90] makes an important assumption regarding the composition of groups in which the games take place. This assumption relies on the fact that each group is defined solely on the basis of connections making up the complex interaction network. However, it is rather unrealistic that this definition holds in real social networks, such as collaboration networks [102]. Figure 9 features a schematic display of this situation. Suppose we know the actual interaction structure of a system composed of six individuals performing collaborative tasks arranged into four groups (figure 9b). If we merge this structure into a projected (one-mode) complex network, the collection of groups is transformed into a star-like graph (figure 9a) having a central hub (node 6) with five neighbours. By making this coarse-graining, we have lost all the information about the group structure of the system, and it is easy to realize that following Santos et al. [90] to construct the groups we recover a very different composition made up of six groups of sizes 6, 4 (2), 3 (2) and 2, respectively. Moreover, it is important to note that a scale-free distribution of interactions  maps directly to a scale-free distribution of group sizes
maps directly to a scale-free distribution of group sizes  . However, in reality, individuals tend to perform collaborative tasks in groups of a rather homogeneous size [104], regardless of the size of the set of their overall collaborators. Accordingly, the distribution of group size is better described by an exponential distribution
. However, in reality, individuals tend to perform collaborative tasks in groups of a rather homogeneous size [104], regardless of the size of the set of their overall collaborators. Accordingly, the distribution of group size is better described by an exponential distribution  .
.
Figure 9.
Schematic display of the two different forms of encoding collaboration data. In the central plot (b), several collaborating groups represent the original data. The interactions among players can be translated into a projected complex network (a). However, if one aims at preserving all the information about the group structure, a representation as a bipartite graph (c) is more appropriate. Figure adapted from Gómez-Gardeñes et al. [103].
To preserve information about both the structure of pairwise ties and the structure of groups, Gómez-Gardeñes et al. [103,105] have introduced the use of bipartite graphs. A bipartite representation, as depicted in figure 9c, contains two types of nodes. One denoting individuals (circular nodes), and the other denoting groups (square nodes), whereas links connect them as appropriate. Such a bipartite framework is well suited for studying dynamical processes involving N-player interactions.
The set-up of the public goods game on bipartite networks is similar to that on one-mode networks, with deviations as described in Gómez-Gardeñes et al. [103,105]. The graph is composed of N agents playing the game within G (not necessarily equal to N) groups whose connections are encoded in a G × N matrix Bij. The ith row of this matrix accounts for all the individuals belonging to group i, so that Bij = 1 when agent j participates in group i while Bij = 0 otherwise. Alternatively, the information in the ith column encodes all the groups containing agent i, i.e. Bji = 1 when agent i participates in group j and Bji = 0 otherwise. At each time step, player i plays a round of the game in every group it is a member. The total pay-off after being involved in  groups can be expressed as
groups can be expressed as
 |
3.2 |
where 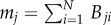 is the number of individuals in group j. Although, in principle, one could take further advantage of the group structure in order to define different scenarios for the update of strategies, the evolutionary dynamics is defined identically to that for one-mode projected networks [103,105]. The updating can rely on the usage of a replicator-like rule [90], or the Fermi rule introduced in equation (2.2).
is the number of individuals in group j. Although, in principle, one could take further advantage of the group structure in order to define different scenarios for the update of strategies, the evolutionary dynamics is defined identically to that for one-mode projected networks [103,105]. The updating can rely on the usage of a replicator-like rule [90], or the Fermi rule introduced in equation (2.2).
Results presented in Gómez-Gardeñes et al. [103] indicate that, regardless of the update rule and the details of the public goods game, the actual group structure of collaboration networks promotes the evolution of cooperation. One arrives at this conclusion by comparing the cooperation level on the bipartite representation of a real collaboration network (containing author–article links) with the cooperation level on a projected one-mode network that is composed solely of author–author ties (figure 10). On the other hand, by comparing the performance of two bipartite structures having different social connectivity—one having scale-free and the other a Poissonian distribution of degree—but the same group structure [105], we find that it is the group structure rather than the distribution of degree that determines the evolution of public cooperation. In particular, the promotion of cooperation owing to a scale-free distribution of degree as reported in Santos et al. [90] is hindered when the group structure is disentangled from the social network of contacts by means of the bipartite formulation.
Figure 10.
Cooperation level 〈C〉 as a function of the multiplication factor r for the public goods game played on the one-mode (projected) collaboration network and the bipartite graph preserving the original group structure. The two plots are for the public goods game played in (a) the fixed cost per game and (b) the fixed cost per individual mode. The strategy updating makes use of the Fermi function (see equation (2.2)). This figure is adapted from Gómez-Gardeñes et al. [103]. Filled squares, one mode; filled circles, bipartite.
Notably, the bipartite formulation has recently been revisited by Peña & Rochat [106], who compared the impact of different distributions used separately for group sizes and the number of individual contacts. They showed that a key factor that drives cooperation on bipartite networks is the degree of overlap between the groups. The latter can be interpreted as the bipartite analogue of the clustering coefficient in one-mode networks, which, as reviewed above, is highly beneficial for the evolution of public cooperation. The results reported in Peña & Rochat [106] also help us to understand the high level of cooperation observed in one-mode scale-free networks [90], because the assumption that the structure of groups is implicitly defined by the network itself imposes a high degree of overlap between the groups, especially for scale-free networks.
3.3. Other network-based frameworks
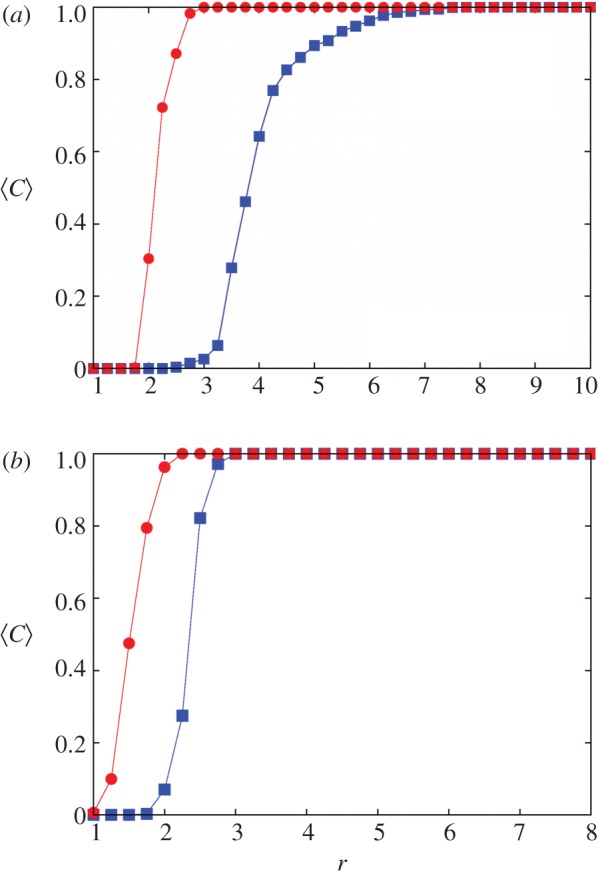
In addition to the distributions of individual contacts and group sizes, the impact of other topological features of social networks has also been studied. In particular, in Wang et al. [107], the authors studied a hierarchical social structure composed of communities or modules in which several public goods games are played simultaneously. For a set-up with two hierarchical levels, we thus have the following framework: player i is a member in one group of size m at the lowest level and, simultaneously, it is also a member in a larger group together with the rest of the population. This set-up can be generalized to systems composed of n hierarchical levels, as shown in figure 11a for n = 3. The coupling between the evolutionary dynamics in each of the levels is accomplished by splitting the contribution c of each cooperator by the number of groups, and by choosing a different probability for the updating rules within and between modules. Results reported in Wang et al. [107] indicate that public cooperation is promoted when imitation between players belonging to different modules is strong, while, at the same time, the imitation between players within the same lowest level module is weak. This combination of strengths leads to the onset of groups composed solely of cooperators, but it also enables cooperators who coexist with defectors to avoid extinction.
Figure 11.
(a) The multilevel hierarchical structure introduced in Wang et al. [107], where groups are hierarchically ordered as modules of a network in which the public goods game is played. (b) Two interdependent lattices as studied in Wang et al. [108]. Players can adopt different strategies within each layer, but coupling between the pay-offs obtained in each of the two layers (see equation (3.3)) makes their evolutionary dynamics interdependent.
Another important structural feature recently addressed is multiplexity [109–111], or the coupling between several network substrates. Although this structural ingredient has only recently been tackled in the field of network science, some literature on the subject has already appeared in the context of evolutionary games [108,112]. In Wang et al. [108], where the focus was on group interactions, the authors have studied a simple layered framework in which two regular lattices were coupled, as depicted schematically in figure 11b. The rationale is that a given individual is represented in each of the two layers, although, in principle, it can adopt different strategies in each of them. The coupling between layers is solely due to the utility function, which couples the pay-off PiA obtained on layer A and the pay-off PjB obtained on layer B as
| 3.3 |
The parameter α ∈ [0,1] determines the bias in each layer. When α → 0 (α → 1), the dynamics of layer A (B) is almost fully driven by layer B (A). An intriguing result reported in Wang et al. [108] is that, as one layer almost dominates the other, cooperation is very much favoured in the slave layer, i.e. in A when α → 0 or in B when α → 1. Obviously, the master layer then behaves almost equally as an isolated graph, showing a greater vulnerability to defection than the slave layer. These initial results invite further research concerning the impact of multiplexity of social networks on the evolution of cooperation.
3.4. Populations of mobile agents
Prior to focusing on coevolutionary rules, we review one special case in which a population of mobile players is embedded in a physical space so that a time-varying network of interactions is constructed sequentially and in accordance with their movements. Two possible scenarios must be distinguished. First, there are studies in which the movement of players is independent of the evolutionary dynamics [113–116]. Effectively, the movements thus correspond to a random walk. Second, the motion of players can be affected by the outcome of the game [117–123]. In addition to this classification, we must also distinguish two different types of space in which the players live. In particular, players can either move on a lattice or they can move across continuous space. In the former case, the network of interactions is set simply by considering two players occupying two adjacent sites as connected, so that the resulting graph is a square lattice with a certain fraction of missing links [124]. The usage of continuous space, on the other hand, requires the construction of a random geometric graph every time after all the players have changed their position. Such graphs are typically constructed by connecting together all pairs of players who are less apart than a given threshold R. This introduces an additional parameter that allows an interpolation between a fully unconnected (R = 0) and a fully connected (R → ∞) graph.
An interesting study in which the movements were uncorrelated with the evolutionary dynamics was performed by Cardillo et al. [116]. The players moved randomly with a constant velocity v in a continuous two-dimensional plane, establishing a random geometric graph with constant radius R after all agents have made a move. The groups in which the public goods game was played were then constructed as introduced in Santos et al. [90]. Two resonance-like phenomena were reported, given that the fraction of cooperators exhibited a bell-shaped dependence on both v and R. Accordingly, an intermediate degree of mobility as well as an intermediate level of connectedness among the mobile players were found to be optimal for the evolution of cooperation. The maximum was found to be closely related to the percolation threshold of a random geometric graph, much in agreement with preceding results on static networks [125].
The set-up where the mobility was driven by the evolutionary dynamics was explored more often, especially for games governed by pairwise interaction. Factors that can affect how and when the players move include their fitness [117,118], aspiration level [119,120], as well as reputation [122]. In terms of group interactions, Roca et al. [121] considered a system of N agents occupying an L × L > N square lattice. The players were allowed to move to an empty site if their aspirations were not met. They have showed that only moderate greediness leads to high levels of public cooperation and social agglomeration. A similar model was studied by Xia et al. [123], who showed that the provisioning of local information about the pay-offs of nearest neighbours does not alter the original conclusions presented in Roca & Helbing [121].
We conclude this section by noting that pay-off-driven mobility has also been explored in the framework of metapopulations [126]. There, a population of N players moves across a network of M nodes, where M > N. Thus, when several players meet on the same node of the network, they play a round of the public goods game. Subsequently, based on the difference between the collected pay-off and their aspiration level, they decide whether to stay or to move to a neighbouring node. An interesting result reported in Zhang et al. [126] is that the larger the ratio M/N, and hence the larger the average size of groups in which the game is played, the better the chances of cooperators to survive.
4. Coevolutionary rules
Coevolutionary models go beyond structured populations in the sense that the interaction network itself may be subject to evolution [127–130]. However, this need not always be the case, as the coevolutionary process can also affect system properties other than the interaction network, such as the group size [131], heritability [132], the selection of opponents [133], the allocation of investments [134], the distribution of public goods [135] or the punishment activity of individual players [69]. Possibilities seem endless, as recently reviewed for games governed by pairwise interactions [136]. Games governed by group interactions have received comparatively little attention.
One of the earliest coevolutionary rules affecting the interaction network during a public goods game was proposed and studied by Wu et al. [127], who showed that adjusting the social ties based on the pay-offs of players may significantly promote cooperation. If given an opportunity to avoid predominantly defective groups (referred to as a ‘nasty environment’), the population can arrive at a globally cooperative state even for low values of r. Interestingly, decoupling the coevolutionary adjustment of social ties with the evolution of strategies renders the proposed rule ineffective in terms of promoting public cooperation. As depicted in figure 12, allowing for the coevolution of strategy and structure leads to predominantly cooperative states out of an initially mixed population of cooperators and defectors.
Figure 12.
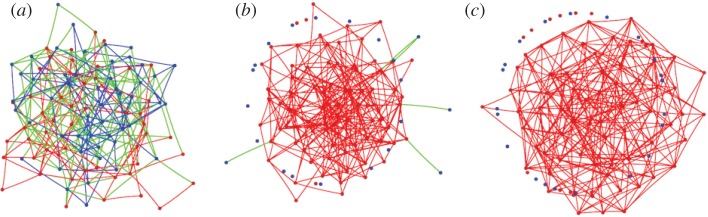
Coevolution of strategy and structure leads to high levels of public cooperation. Networks depict snapshots in time at (a) 0, (b) 2000 and (c) 20 000 iterations, whereby green links connect defector–cooperator pairs, blue links connect two defectors, while red links connect two cooperators. Accordingly, cooperators are depicted by red and defectors are depicted by blue. This figure was adapted from Wu et al. [127], where further details with respect to the simulation set-up can also be found.
Alternative coevolutionary models affecting the interactions among players have also been studied [128–130], with the prevailing conclusion being that the evolution of public cooperation can benefit greatly from the interplay between strategy and structure. In particular, aspiration-induced reconnection can induce a negative feedback effect that stops the downfall of cooperators at low values of r and lead to heterogeneous interaction networks [129], whereas strategy-inspired additions and deletions of links between players can lead to hierarchical clustering [130]. Also worth noting is the first coevolutionary model making use of the bipartite network formalism [137], where individuals can switch groups. An implementation of social policies is thus possible, and in Smaldino & Lubell [137] it was shown that restricting the maximum capacity of groups is a good policy for promoting cooperation.
Another interesting coevolutionary rule is the preferential selection of opponents introduced in Shi et al. [133]. It was shown that a simple pay-off-based selection can lead to higher pay-offs along the boundaries separating cooperators and defectors, which in turn facilitates spatial reciprocity and leads to larger cooperative clusters. Likewise, leaving the interactions among players unchanged is the dynamic allocation of investments [134] and the success-driven distribution of public goods studied in Perc [135]. Both frameworks have the ability to promote cooperation, although in the latter case the complete dominance of cooperators may be elusive owing to the spontaneous emergence of super-persistent defectors. This, in turn, indicates that success-driven mechanisms are crucial for effectively harvesting benefits from collective actions, but that they may also account for the observed persistence of maladaptive behaviour.
Strategic complexity may also be subject to coevolution, as proposed and studied in Perc & Szolnoki [69], where players were allowed to adapt their sanctioning efforts depending on the failure of cooperation in groups where they were members. Preceding models assumed that, once set, the fine and cost of punishment do not change over time [59]. However, by relaxing this restriction, one obtains the spontaneous emergence of punishment so that both defectors and those unwilling to punish them with globally negligible investments are deterred. Crucial is the fact that adaptive punishers are able to smooth the interfaces between cooperators and defectors, as demonstrated in figure 13. This indicates that coevolution may be the key to understanding complex social behaviour as well as its stability in the presence of seemingly more cost-efficient strategies.
Figure 13.
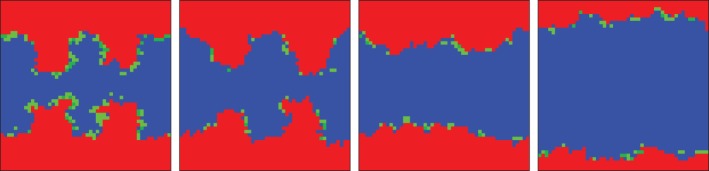
Rough interfaces enable defectors (red) to have an effective exploitation of cooperators (blue), thus hindering spatial reciprocity. Upon the introduction of adaptive punishment (green, where darker (lighter) shades imply stronger (weaker) punishing activity), interfaces become smoother, which in turn invigorates spatial reciprocity and prevents defectors from being able to exploit the public goods. A prepared initial state, corresponding to a rough interface, is used to reveal the workings of this mechanism. Interestingly, here the stationary state is a pure C phase, while under the same conditions peer-punishment without coevolution yields a pure D phase. We refer to Perc & Szolnoki [69] for further details.
Before concluding this review, it is important to point out that diffusion may also be seen as a coevolutionary process [136], as it allows players to move in the population. In a series of papers, Wakano et al. [138–140] have elaborated extensively on the patterns that may arise in two-dimensional continuous space. A detailed analysis of the spatio-temporal patterns based on Fourier analysis and Lyapunov exponents reveals the presence of spatio-temporal chaos [140], which fits with the complexity of solutions one is likely to encounter when studying group interactions on structured populations.
5. Outlook
Although our understanding of evolutionary processes that are governed by group interactions has reached a remarkably high level, there still exist unexplored problems that require further attention. While physics-inspired studies account for the majority of recent advances in this topic [23,24,136], there also exist many experimental and theoretical results on well-mixed populations that would be interesting to verify on structured populations.
The ‘stick versus carrot’ dilemma [141–143], for example, is yet to be settled on structured populations. It is also important to note that recent research related to antisocial punishment [77,80,144,145] and reward [65,78,71,141,142] is questioning the aptness of sanctioning for elevating collaborative efforts and raising social welfare. The majority of previous studies addressing the ‘stick versus carrot’ dilemma concluded that punishment is more effective than reward in sustaining public cooperation [72,146]. However, evidence shows that rewards may be as effective as punishment and lead to higher total earnings without potential damage to reputation [147,148] or fear from retaliation [149]. In view of recent advances concerning punishment [59–62,64] and reward [65] on lattices, it seems worth continuing in this direction also with antisocial punishment and the competition between punishment and reward in general. There is also the question of the scale at which social dilemmas are best resolved [150], as well as the issue of the emergence of fairness in group interactions [151], which could also both be examined on structured populations.
Complex interactions networks also offer many possibilities for future research on games governed by group interactions. The concept of bipartiteness [103,105], for example, appears to be related to multi-level selection [107,152], which, however, was so far considered without explicit network structure describing the interactions among players. Motivation can also be gathered from coevolutionary games [136], where group interactions on structured populations can still be considered as being at an early stage of development. While initially many studies that were performed only for pairwise social dilemmas appeared to be trivially valid also for games that are governed by group interactions, recent research has made it clear that at least by default this is in fact not the case. In this sense, the incentives are clearly there to re-examine the key findings that were previously reported only for pairwise games on complex and coevolutionary networks and also for games that are governed by group interactions.
6. Summary
Group interactions on structured populations can be much more than the sum of the corresponding pairwise interactions. Strategic complexity, different public benefit functions and coevolutionary processes on either lattices or complex networks provide a rich playground that can be explored successfully with methods of statistical physics [23,81,153]. Research performed thus far offers a thorough understanding of the many key phenomena that can be uniquely associated with games governed by group interactions. On lattices, group interactions effectively link players who are members of the same groups without there being a physical connection between them. This renders local particularities of interaction networks largely unimportant for the outcome of the evolutionary process, and it introduces the deterministic limit of strategy imitation as optimal for the evolution of public cooperation [28]. On the other hand, the size of the group [32] as well as public benefit functions [48] gain markedly in significance, thus offering new possibilities for exploration. Strategic complexity [54,60,62,64,65] significantly increases the complexity of solutions owing to spatial pattern formation, yet the results obtained provide elegant explanations for several long-standing problems in the social sciences. Examples include the second-order free-rider problem [59], as well as the stability of reward [65] and the successful evolution of institutions [62,64], all of which require additional strategic complexity on well-mixed populations in order to be explained. Complex networks and coevolutionary models further extend the subject with insightful results concerning bipartiteness [103,105] and the rewiring of social ties [127,129], all adding significantly to our understanding of the provisioning of public goods in human societies.
Although the origins of prosocial behaviour in groups of unrelated individuals are difficult to track down—there exists evidence indicating that between-group conflicts may have been instrumental in enhancing in-group solidarity [154], yet alloparental care and provisioning for someone else's young have also been proposed as viable for igniting the evolution of our other-regarding abilities [155]—it is a fact that cooperation in groups is crucial for the remarkable evolutionary success of the human species, and it is therefore of importance to identify mechanisms that might have spurred its later development [2,156]. The aim of this review was to highlight the importance of such group interactions, and to demonstrate the suitability of methods of statistical physics and network science for studying the evolution of cooperation in games that are governed by them.
Acknowledgements
This research was supported by the Slovenian Research Agency (grant no. J1-4055), the Spanish DGICYT (under project nos FIS2011-25167 and MTM2009-13848), the Comunidad de Aragón through a project to FENOL, and the Hungarian National Research Fund (grant no. K-101490). J.G.G. is supported by MEC through the Ramón y Cajal programme.
References
- 1.Nowak MA. 2006. Evolutionary dynamics. Cambridge, MA: Harvard University Press [Google Scholar]
- 2.Sigmund K. 2010. The calculus of selfishness. Princeton, MA: Princeton University Press [Google Scholar]
- 3.Archetti M, Scheuring I. 2012. Review: game theory of public goods in one-shot social dilemmas without assortment. J. Theor. Biol. 299, 9–20 10.1016/j.jtbi.2011.06.018 (doi:10.1016/j.jtbi.2011.06.018) [DOI] [PubMed] [Google Scholar]
- 4.Chuang JS, Rivoire O, Leibler S. 2009. Simpson's paradox in a synthetic microbial system. Science 323, 272–275 10.1126/science.1166739 (doi:10.1126/science.1166739) [DOI] [PubMed] [Google Scholar]
- 5.Gore J, Youk H, van Qudenaarden A. 2009. Snowdrift game dynamics and facultative cheating in yeast. Nature 459, 253–256 10.1038/nature07921 (doi:10.1038/nature07921) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 6.Chuang JS, Rivoire O, Leibler S. 2010. Cooperation and Hamilton's rule in a simple synthetic microbial system. Mol. Syst. Biol. 6, 398. 10.1038/msb.2010.57 (doi:10.1038/msb.2010.57) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 7.Frey E. 2010. Evolutionary game theory: theoretical concepts and applications to microbial communities. Physica A 389, 4265–4298 10.1016/j.physa.2010.02.047 (doi:10.1016/j.physa.2010.02.047) [DOI] [Google Scholar]
- 8.Schuster S, de Figueiredo L, Schroeter A, Kaleta C. 2011. Combining metabolic pathway analysis with evolutionary game theory. Explaining the occurrence of low-yield pathways by an analytic optimization approach. BioSystems 105, 147–153 10.1016/j.biosystems.2011.05.007 (doi:10.1016/j.biosystems.2011.05.007) [DOI] [PubMed] [Google Scholar]
- 9.Archetti M. 2011. Contract theory for the evolution of cooperation: the right incentives attract the right partner. J. Theor. Biol. 269, 201–207 10.1016/j.jtbi.2010.10.025 (doi:10.1016/j.jtbi.2010.10.025) [DOI] [PubMed] [Google Scholar]
- 10.Cremer J, Melbinger A, Frey E. 2012. Growth dynamics and the evolution of cooperation in microbial populations. Sci. Rep. 2, 281. 10.1038/srep00281 (doi:10.1038/srep00281) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 11.Motro U. 1991. Co-operation and defection: playing the field and the ESS. J. Theor. Biol. 151, 145–154 10.1016/S0022-5193(05)80358-3 (doi:10.1016/S0022-5193(05)80358-3) [DOI] [PubMed] [Google Scholar]
- 12.Hardin G. 1968. The tragedy of the commons. Science 162, 1243–1248 10.1126/science.162.3859.1243 (doi:10.1126/science.162.3859.1243) [DOI] [PubMed] [Google Scholar]
- 13.Hofbauer J, Sigmund K. 1988. The theory of evolution and dynamical systems. Cambridge, UK: Cambridge University Press [Google Scholar]
- 14.Gintis H. 2000. Game theory evolving. Princeton, NJ: Princeton University Press [Google Scholar]
- 15.Archetti M, Scheuring I. 2011. Coexistence of cooperation and defection in public goods games. Evolution 65, 1140–1148 10.1111/j.1558-5646.2010.01185.x (doi:10.1111/j.1558-5646.2010.01185.x) [DOI] [PubMed] [Google Scholar]
- 16.Cressman R, Song J-W, Zhang B-Y, Tao Y. 2012. Cooperation and evolutionary dynamics in the public goods game with institutional incentives. J. Theor. Biol. 299, 144–151 10.1016/j.jtbi.2011.07.030 (doi:10.1016/j.jtbi.2011.07.030) [DOI] [PubMed] [Google Scholar]
- 17.Peña J. 2012. Group-size diversity in public goods games. Evolution 66, 623–636 10.1111/j.1558-5646.2011.01504.x (doi:10.1111/j.1558-5646.2011.01504.x) [DOI] [PubMed] [Google Scholar]
- 18.Nowak MA, May RM. 1992. Evolutionary games and spatial chaos. Nature 359, 826–829 10.1038/359826a0 (doi:10.1038/359826a0) [DOI] [Google Scholar]
- 19.Floría LM, Gracia-Lázaro C, Gómez-Gardeñes J, Moreno Y. 2009. Social network reciprocity as a phase transition in evolutionary cooperation. Phys. Rev. E 79, 026106. 10.1103/PhysRevE.79.026106 (doi:10.1103/PhysRevE.79.026106) [DOI] [PubMed] [Google Scholar]
- 20.Taylor PD, Irwin AJ. 2000. Overlapping generations can promote altruistic behaviour. Evolution 54, 1135–1141 [DOI] [PubMed] [Google Scholar]
- 21.Irwin AJ, Taylor PD. 2000. Evolution of dispersal in a stepping-stone population with overlapping generations. Theor. Popul. Biol. 58, 321–328 10.1006/tpbi.2000.1490 (doi:10.1006/tpbi.2000.1490) [DOI] [PubMed] [Google Scholar]
- 22.Irwin AJ, Taylor PD. 2001. Evolution of altruism in stepping-stone populations with overlapping generations. Theor. Popul. Biol. 60, 315–325 10.1006/tpbi.2001.1533 (doi:10.1006/tpbi.2001.1533) [DOI] [PubMed] [Google Scholar]
- 23.Szabó G, Fáth G. 2007. Evolutionary games on graphs. Phys. Rep. 446, 97–216 10.1016/j.physrep.2007.04.004 (doi:10.1016/j.physrep.2007.04.004) [DOI] [Google Scholar]
- 24.Roca CP, Cuesta JA, Sánchez A. 2009. Evolutionary game theory: temporal and spatial effects beyond replicator dynamics. Phys. Life Rev. 6, 208–249 10.1016/j.plrev.2009.08.001 (doi:10.1016/j.plrev.2009.08.001) [DOI] [PubMed] [Google Scholar]
- 25.Wasserman S, Faust K. 1994. Social network analysis. Cambridge, UK: Cambridge University Press [Google Scholar]
- 26.Kessler DA, Levine H. 1993. Pattern formation in Dictyostelium via the dynamics of cooperative biological entities. Phys. Rev. E 48, 4801–4804 10.1103/PhysRevE.48.4801 (doi:10.1103/PhysRevE.48.4801) [DOI] [PubMed] [Google Scholar]
- 27.Iwasa Y, Nakamaru M, Levin SA. 1998. Allelopathy of bacteria in a lattice population: competition between colicin sensitive and colicin-producing strains. Evol. Ecol. 12, 785–802 10.1023/A:1006590431483 (doi:10.1023/A:1006590431483) [DOI] [Google Scholar]
- 28.Szolnoki A, Perc M, Szabó G. 2009. Topology-independent impact of noise on cooperation in spatial public goods games. Phys. Rev. E 80, 056109. 10.1103/PhysRevE.80.056109 (doi:10.1103/PhysRevE.80.056109) [DOI] [PubMed] [Google Scholar]
- 29.Huberman B, Glance N. 1993. Evolutionary games and computer simulations. Proc. Natl Acad. Sci. USA 90, 7716–7718 10.1073/pnas.90.16.7716 (doi:10.1073/pnas.90.16.7716) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 30.Szabó G, Vukov J, Szolnoki A. 2005. Phase diagrams for an evolutionary prisoner's dilemma game on two-dimensional lattices. Phys. Rev. E 72, 047107. 10.1103/PhysRevE.72.047107 (doi:10.1103/PhysRevE.72.047107) [DOI] [PubMed] [Google Scholar]
- 31.Vukov J, Szabó G, Szolnoki A. 2006. Cooperation in the noisy case: prisoner's dilemma game on two types of regular random graphs. Phys. Rev. E 73, 067103. 10.1103/PhysRevE.73.067103 (doi:10.1103/PhysRevE.73.067103) [DOI] [PubMed] [Google Scholar]
- 32.Szolnoki A, Perc M. 2011. Group-size effects on the evolution of cooperation in the spatial public goods game. Phys. Rev. E 84, 047102. 10.1103/PhysRevE.84.047102 (doi:10.1103/PhysRevE.84.047102) [DOI] [PubMed] [Google Scholar]
- 33.Szabó G, Szolnoki A. 2009. Cooperation in spatial prisoner's dilemma with two types of players for increasing number of neighbors. Phys. Rev. E 79, 016106. 10.1103/PhysRevE.79.016106 (doi:10.1103/PhysRevE.79.016106) [DOI] [PubMed] [Google Scholar]
- 34.Isaac R, Walker J. 1988. Group size effects in public goods provision: the voluntary contributions mechanism. Q. J. Econ. 103, 179–199 10.2307/1882648 (doi:10.2307/1882648) [DOI] [Google Scholar]
- 35.Shi D-M, Zhuang Y, Wang B-H. 2010. Group diversity promotes cooperation in the spatial public goods game. EPL 90, 58003. 10.1209/0295-5075/90/58003 (doi:10.1209/0295-5075/90/58003) [DOI] [Google Scholar]
- 36.Perc M. 2007. Does strong heterogeneity promote cooperation by group interactions? New J. Phys. 13, 123027. 10.1088/1367-2630/13/12/123027 (doi:10.1088/1367-2630/13/12/123027) [DOI] [Google Scholar]
- 37.Perc M, Szolnoki A. 2008. Social diversity and promotion of cooperation in the spatial prisoner's dilemma game. Phys. Rev. E 77, 011904. 10.1103/PhysRevE.77.011904 (doi:10.1103/PhysRevE.77.011904) [DOI] [PubMed] [Google Scholar]
- 38.Gao J, Li Z, Wu T, Wang L. 2010. Diversity of contribution promotes cooperation in public goods games. Physica A 389, 3166–3171 10.1016/j.physa.2010.04.018 (doi:10.1016/j.physa.2010.04.018) [DOI] [Google Scholar]
- 39.Vukov J, Santos F, Pacheco J. 2011. Escaping the tragedy of the commons via directed investments. J. Theor. Biol. 287, 37–41 10.1016/j.jtbi.2011.07.022 (doi:10.1016/j.jtbi.2011.07.022) [DOI] [PubMed] [Google Scholar]
- 40.Cao X-B, Du W-B, Rong Z-H. 2010. Evolutionary public goods game on scale-free networks with heterogeneous investment. Physica A 389, 1273–1280 10.1016/j.physa.2009.11.044 (doi:10.1016/j.physa.2009.11.044) [DOI] [Google Scholar]
- 41.Peng D, Yang H-X, Wang W-X, Chen GR, Wang B-H. 2010. Promotion of cooperation induced by nonuniform payoff allocation in spatial public goods game. Eur. Phys. J. B 73, 455–459 10.1140/epjb/e2010-00008-7 (doi:10.1140/epjb/e2010-00008-7) [DOI] [Google Scholar]
- 42.Lei C, Jia TWJ-Y, Cong R, Wang L. 2010. Heterogeneity of allocation promotes cooperation in public goods games. Physica A 389, 4708–4714 10.1016/j.physa.2010.06.002 (doi:10.1016/j.physa.2010.06.002) [DOI] [Google Scholar]
- 43.Guan J-Y, Wu Z-X, Wang Y-H. 2007. Effects of inhomogeneous activity of players and noise on cooperation in spatial public goods games. Phys. Rev. E 76, 056101. 10.1103/PhysRevE.76.056101 (doi:10.1103/PhysRevE.76.056101) [DOI] [PubMed] [Google Scholar]
- 44.Szolnoki A, Szabó G. 2007. Cooperation enhanced by inhomogeneous activity of teaching for evolutionary prisoner's dilemma games. EPL 77, 30004. 10.1209/0295-5075/77/30004 (doi:10.1209/0295-5075/77/30004) [DOI] [Google Scholar]
- 45.Boza G, Számadó S. 2010. Beneficial laggards: multilevel selection, cooperative polymorphism and division of labour in threshold public good games. BMC Evol. Biol. 10, 336. 10.1186/1471-2148-10-336 (doi:10.1186/1471-2148-10-336) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 46.Wang J, Fu F, Wu T, Wang L. 2009. Emergence of social cooperation in threshold public good games with collective risk. Phys. Rev. E 80, 016101. 10.1103/PhysRevE.80.016101 (doi:10.1103/PhysRevE.80.016101) [DOI] [PubMed] [Google Scholar]
- 47.Deng K, Chu T. 2011. Adaptive evolution of cooperation through Darwinian dynamics in public goods games. PLoS ONE 6, e25496. 10.1371/journal.pone.0025496 (doi:10.1371/journal.pone.0025496) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 48.Szolnoki A, Perc M. 2010. Impact of critical mass on the evolution of cooperation in spatial public goods games. Phys. Rev. E 81, 057101. 10.1103/PhysRevE.81.057101 (doi:10.1103/PhysRevE.81.057101) [DOI] [PubMed] [Google Scholar]
- 49.Shi D-M, Zhuang Y, Li Y-J, Wang B-H. 2011. Depreciation of public goods in spatial public goods games. J. Stat. Mech. 2011, P10007. 10.1088/1742-5468/2011/10/P10007 (doi:10.1088/1742-5468/2011/10/P10007) [DOI] [Google Scholar]
- 50.Shi D-M, Zhuang Y, Wang B-H. 2011. Effect of depreciation of the public goods in spatial public goods games. Physica A 391, 1636–1641 10.1016/j.physa.2011.10.006 (doi:10.1016/j.physa.2011.10.006) [DOI] [Google Scholar]
- 51.Wang J, Wu B, Chen X, Wang L. 2010. Evolutionary dynamics of public goods games with diverse contributions in finite populations. Phys. Rev. E 81, 056103. 10.1103/PhysRevE.81.056103 (doi:10.1103/PhysRevE.81.056103) [DOI] [PubMed] [Google Scholar]
- 52.Fischbacher U, Gächter S, Fehr E. 2001. Are people conditionally cooperative? Evidence from a public goods experiment. Econ. Lett. 71, 397–404 10.1016/S0165-1765(01)00394-9 (doi:10.1016/S0165-1765(01)00394-9) [DOI] [Google Scholar]
- 53.Szolnoki A, Perc M. 2012. Conditional strategies and the evolution of cooperation in spatial public goods games. Phys. Rev. E 85, 026104. 10.1103/PhysRevE.85.026104 (doi:10.1103/PhysRevE.85.026104) [DOI] [PubMed] [Google Scholar]
- 54.Szabó G, Hauert C. 2002. Phase transitions and volunteering in spatial public goods games. Phys. Rev. Lett. 89, 118101. 10.1103/PhysRevLett.89.118101 (doi:10.1103/PhysRevLett.89.118101) [DOI] [PubMed] [Google Scholar]
- 55.Hauert C, De Monte S, Hofbauer J, Sigmund K. 2002. Volunteering as red queen mechanism for cooperation in public goods game. Science 296, 1129–1132 10.1126/science.1070582 (doi:10.1126/science.1070582) [DOI] [PubMed] [Google Scholar]
- 56.Semmann D, Krambeck H-J, Milinski M. 2003. Volunteering leads to rock-paper-scissors dynamics in a public goods game. Nature 425, 390–393 10.1038/nature01986 (doi:10.1038/nature01986) [DOI] [PubMed] [Google Scholar]
- 57.Hinrichsen H. 2000. Non-equilibrium critical phenomena and phase transitions into absorbing states. Adv. Phys. 49, 815–958 10.1080/00018730050198152 (doi:10.1080/00018730050198152) [DOI] [Google Scholar]
- 58.Liggett TM. 1985. Interacting particle systems. New York, NY: Springer [Google Scholar]
- 59.Helbing D, Szolnoki A, Perc M, Szabó G. 2010. Evolutionary establishment of moral and double moral standards through spatial interactions. PLoS Comput. Biol. 6, e1000758. 10.1371/journal.pcbi.1000758 (doi:10.1371/journal.pcbi.1000758) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 60.Helbing D, Szolnoki A, Perc M, Szabó G. 2010. Punish, but not too hard: how costly punishment spreads in the spatial public goods game. New J. Phys. 12, 083005. 10.1088/1367-2630/12/8/083005 (doi:10.1088/1367-2630/12/8/083005) [DOI] [Google Scholar]
- 61.Helbing D, Szolnoki A, Perc M, Szabó G. 2010. Defector-accelerated cooperativeness and punishment in public goods games with mutations. Phys. Rev. E 81, 057104. 10.1103/PhysRevE.81.057104 (doi:10.1103/PhysRevE.81.057104) [DOI] [PubMed] [Google Scholar]
- 62.Szolnoki A, Szabó G, Perc M. 2011. Phase diagrams for the spatial public goods game with pool punishment. Phys. Rev. E 83, 036101. 10.1103/PhysRevE.83.036101 (doi:10.1103/PhysRevE.83.036101) [DOI] [PubMed] [Google Scholar]
- 63.Perc M. 2012. Sustainable institutionalized punishment requires elimination of second-order free-riders. Sci. Rep. 2, 344. 10.1038/srep00344 (doi:10.1038/srep00344) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 64.Szolnoki A, Szabó G, Czakó L. 2011. Competition of individual and institutional punishments in spatial public goods games. Phys. Rev. E 84, 046106. 10.1103/PhysRevE.84.046106 (doi:10.1103/PhysRevE.84.046106) [DOI] [PubMed] [Google Scholar]
- 65.Szolnoki A, Perc M. 2010. Reward and cooperation in the spatial public goods game. EPL 92, 38003. 10.1209/0295-5075/92/38003 (doi:10.1209/0295-5075/92/38003) [DOI] [Google Scholar]
- 66.Fehr E. 2004. Don't lose your reputation. Nature 432, 449–450 10.1038/432449a (doi:10.1038/432449a) [DOI] [PubMed] [Google Scholar]
- 67.Panchanathan K, Boyd R. 2004. Indirect reciprocity can stabilize cooperation without the second-order free rider problem. Nature 432, 499–502 10.1038/nature02978 (doi:10.1038/nature02978) [DOI] [PubMed] [Google Scholar]
- 68.Fowler JH. 2005. Second-order free-riding problem solved? Nature 437, E8. 10.1038/nature04201 (doi:10.1038/nature04201) [DOI] [PubMed] [Google Scholar]
- 69.Perc M, Szolnoki A. 2012. Self-organization of punishment in structured populations. New J. Phys. 14, 043013. 10.1088/1367-2630/14/4/043013 (doi:10.1088/1367-2630/14/4/043013) [DOI] [Google Scholar]
- 70.Fehr E, Gächter S. 2000. Cooperation and punishment in public goods experiments. Am. Econ. Rev. 90, 980–994 10.1257/aer.90.4.980 (doi:10.1257/aer.90.4.980) [DOI] [Google Scholar]
- 71.Rand DG, Dreber A, Ellingsen T, Fudenberg D, Nowak MA. 2009. Positive interactions promote public cooperation. Science 325, 1272–1275 10.1126/science.1177418 (doi:10.1126/science.1177418) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 72.Sigmund K. 2007. Punish or perish? Retaliation and collaboration among humans. Trends Ecol. Evol. 22, 593–600 10.1016/j.tree.2007.06.012 (doi:10.1016/j.tree.2007.06.012) [DOI] [PubMed] [Google Scholar]
- 73.Binder K, Hermann DK. 1988. Monte Carlo simulations in statistical phyisics. Heidelberg, Germany: Springer [Google Scholar]
- 74.Landau D, Binder K. 2000. A guide to Monte Carlo simulations in statistical physics. Cambridge, UK: Cambridge University Press [Google Scholar]
- 75.Brandt H, Hauert C, Sigmund K. 2003. Punishment and reputation in spatial public goods games. Proc. R. Soc. Lond. B 270, 1099–1104 10.1098/rspb.2003.2336 (doi:10.1098/rspb.2003.2336) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 76.Nakamaru M, Iwasa Y. 2005. Evolution of altruism by costly punishment in lattice-structured population: score-dependent viability versus score-dependent fertility. Evol. Ecol. Res. 7, 853–870 [Google Scholar]
- 77.Rand DG, Armao JJ, Nakamaru M, Ohtsuki H. 2010. Anti-social punishment can prevent the co-evolution of punishment and cooperation. J. Theor. Biol. 265, 624–632 10.1016/j.jtbi.2010.06.010 (doi:10.1016/j.jtbi.2010.06.010) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 78.Sigmund K, Hauert C, Nowak MA. 2001. Reward and punishment. Proc. Natl Acad. Sci. USA 98, 10 757–10 762. 10.1073/pnas.161155698 (doi:10.1073/pnas.161155698) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 79.Hauert C, Traulsen A, Brandt H, Nowak MA, Sigmund K. 2008. Public goods with punishment and abstaining in finite and infinite populations. Biol. Theor. 3, 114–122 10.1162/biot.2008.3.2.114 (doi:10.1162/biot.2008.3.2.114) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 80.Rand DG, Nowak MA. 2011. The evolution of antisocial punishment in optional public goods games. Nat. Commun. 2, 434. 10.1038/ncomms1442 (doi:10.1038/ncomms1442) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 81.Albert R, Barabási A-L. 2002. Statistical mechanics of complex networks. Rev. Mod. Phys. 74, 47–97 10.1103/RevModPhys.74.47 (doi:10.1103/RevModPhys.74.47) [DOI] [Google Scholar]
- 82.Newman MEJ. 2003. The structure and function of complex networks. SIAM Rev. 45, 167–256 10.1137/S003614450342480 (doi:10.1137/S003614450342480) [DOI] [Google Scholar]
- 83.Boccaletti S, Latora V, Moreno Y, Chavez M, Hwang D. 2006. Complex networks: structure and dynamics. Phys. Rep. 424, 175–308 10.1016/j.physrep.2005.10.009 (doi:10.1016/j.physrep.2005.10.009) [DOI] [Google Scholar]
- 84.Clauset A, Shalizi CR, Newman MEJ. 2009. Power-law distributions in empirical data. SIAM Rev. 51, 661–703 10.1137/070710111 (doi:10.1137/070710111) [DOI] [Google Scholar]
- 85.Santos FC, Pacheco JM. 2005. Scale-free networks provide a unifying framework for the emergence of cooperation. Phys. Rev. Lett. 95, 098104. 10.1103/PhysRevLett.95.098104 (doi:10.1103/PhysRevLett.95.098104) [DOI] [PubMed] [Google Scholar]
- 86.Santos FC, Rodrigues JF, Pacheco JM. 2006. Graph topology plays a determinant role in the evolution of cooperation. Proc. R. Soc. B 273, 51–55 10.1098/rspb.2005.3272 (doi:10.1098/rspb.2005.3272) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 87.Santos FC, Pacheco JM, Lenaerts T. 2006. Evolutionary dynamics of social dilemmas in structured heterogeneous populations. Proc. Natl Acad. Sci. USA 103, 3490–3494 10.1073/pnas.0508201103 (doi:10.1073/pnas.0508201103) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 88.Gómez-Gardeñes J, Campillo M, Moreno Y, Floría LM. 2007. Dynamical organization of cooperation in complex networks. Phys. Rev. Lett. 98, 108103. 10.1103/PhysRevLett.98.108103 (doi:10.1103/PhysRevLett.98.108103) [DOI] [PubMed] [Google Scholar]
- 89.Gómez-Gardeñes J, Poncela J, Floría LM, Moreno Y. 2008. Natural selection of cooperation and degree hierarchy in heterogeneous populations. J. Theor. Biol. 253, 296–301 10.1016/j.jtbi.2008.03.007 (doi:10.1016/j.jtbi.2008.03.007) [DOI] [PubMed] [Google Scholar]
- 90.Santos FC, Santos MD, Pacheco JM. 2008. Social diversity promotes the emergence of cooperation in public goods games. Nature 454, 213–216 10.1038/nature06940 (doi:10.1038/nature06940) [DOI] [PubMed] [Google Scholar]
- 91.Abramson G, Kuperman M. 2001. Social games in a social network. Phys. Rev. E 63, 030901(R). 10.1103/PhysRevE.63.030901 (doi:10.1103/PhysRevE.63.030901) [DOI] [PubMed] [Google Scholar]
- 92.Ohtsuki H, Hauert C, Lieberman E, Nowak MA. 2006. A simple rule for the evolution of cooperation on graphs and social networks. Nature 441, 502–505 10.1038/nature04605 (doi:10.1038/nature04605) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 93.Pusch A, Weber S, Porto M. 2008. Impact of topology on the dynamical organization of cooperation in the prisoner's dilemma game. Phys. Rev. E 77, 036120. 10.1103/PhysRevE.77.036120 (doi:10.1103/PhysRevE.77.036120) [DOI] [PubMed] [Google Scholar]
- 94.Assenza S, Gomez-Gardeñes J, Latora V. 2008. Enhancement of cooperation in highly clustered scale-free networks. Phys. Rev. E 78, 017101. 10.1103/PhysRevE.78.017101 (doi:10.1103/PhysRevE.78.017101) [DOI] [PubMed] [Google Scholar]
- 95.Devlin S, Treloar T. 2009. Cooperation in an evolutionary prisoner's dilemma with degree–degree correlations. Phys. Rev. E 80, 026105. 10.1103/PhysRevE.80.026105 (doi:10.1103/PhysRevE.80.026105) [DOI] [PubMed] [Google Scholar]
- 96.Rong Z, Wu Z-X. 2009. Effect of the degree correlation in public goods game on scale-free networks. EPL 87, 30001. 10.1209/0295-5075/87/30001 (doi:10.1209/0295-5075/87/30001) [DOI] [Google Scholar]
- 97.Rong Z, Yang H-X, Wang W-X. 2010. Feedback reciprocity mechanism promotes the cooperation of highly clustered scale-free networks. Phys. Rev. E 82, 047101. 10.1103/PhysRevE.82.047101 (doi:10.1103/PhysRevE.82.047101) [DOI] [PubMed] [Google Scholar]
- 98.Yang H-X, Wang W-X, Wu Z-X, Lai Y-C, Wang B-H. 2009. Diversity-optimized cooperation on complex networks. Phys. Rev. E 79, 056107. 10.1103/PhysRevE.79.056107 (doi:10.1103/PhysRevE.79.056107) [DOI] [PubMed] [Google Scholar]
- 99.Li J, Wu T, Zeng G, Wang L. 2012. Selective investment promotes cooperation in public goods game. Physica A 391, 3924–3929 10.1016/j.physa.2012.03.016 (doi:10.1016/j.physa.2012.03.016) [DOI] [Google Scholar]
- 100.Zhang H, Yang H, Du W, Wang B, Cao X. 2010. Evolutionary public goods games on scale-free networks with unequal payoff allocation mechanism. Physica A 389, 1099–1104 10.1016/j.physa.2009.11.029 (doi:10.1016/j.physa.2009.11.029) [DOI] [Google Scholar]
- 101.Yang H-X, Rong Z, Lu P-M, Zeng Y-Z. 2012. Effects of aspiration on public cooperation in structured populations. Physica A 391, 4043–4049 10.1016/j.physa.2012.03.018 (doi:10.1016/j.physa.2012.03.018) [DOI] [Google Scholar]
- 102.Newman MEJ. 2004. Coauthorship networks and patterns of scientific collaboration. Proc. Natl Acad. Sci. USA 101, 5200–5205 10.1073/pnas.0307545100 (doi:10.1073/pnas.0307545100) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 103.Gómez-Gardeñes J, Romance M, Criado R, Vilone D, Sánchez A. 2011. Evolutionary games defined at the network mesoscale: the public goods game. Chaos 21, 016113. 10.1063/1.3535579 (doi:10.1063/1.3535579) [DOI] [PubMed] [Google Scholar]
- 104.Ramasco JJ, Dorogovtsev SN, Pastor-Satorras R. 2004. Self-organization of collaboration networks. Phys. Rev. E 70, 036106. 10.1103/PhysRevE.70.036106 (doi:10.1103/PhysRevE.70.036106) [DOI] [PubMed] [Google Scholar]
- 105.Gómez-Gardeñes J, Vilone D, Sánchez A. 2011. Disentangling social and group heterogeneities: public goods games on complex networks. EPL 95, 68003. 10.1209/0295-5075/95/68003 (doi:10.1209/0295-5075/95/68003) [DOI] [Google Scholar]
- 106.Peña J, Rochat Y. 2012. Bipartite graphs as models of population structures in evolutionary multiplayer games. PLoS ONE 7, e44514. 10.1371/journal.pone.0044514 (doi:10.1371/journal.pone.0044514) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 107.Wang J, Wu B, Ho DWC, Wang L. 2011. Evolution of cooperation in multilevel public goods games with community structures. EPL 93, 58001. 10.1209/0295-5075/93/58001 (doi:10.1209/0295-5075/93/58001) [DOI] [Google Scholar]
- 108.Wang Z, Szolnoki A, Perc M. 2012. Evolution of public cooperation on interdependent networks: the impact of biased utility functions. EPL 97, 48001. 10.1209/0295-5075/97/48001 (doi:10.1209/0295-5075/97/48001) [DOI] [Google Scholar]
- 109.Buldyrev SV, Parshani R, Paul G, Stanley HE, Havlin S. 2010. Catastrophic cascade of failures in interdependent networks. Nature 464, 1025–1028 10.1038/nature08932 (doi:10.1038/nature08932) [DOI] [PubMed] [Google Scholar]
- 110.Gao J, Buldyrev SV, Stanley HE, Havlin S. 2012. Networks formed from interdependent networks. Nat. Phys. 8, 40–48 10.1038/nphys2180 (doi:10.1038/nphys2180) [DOI] [PubMed] [Google Scholar]
- 111.Parshani R, Buldyrev SV, Havlin S. 2010. Interdependent networks: reducing the coupling strength leads to a change from a first to second order percolation transition. Phys. Rev. Lett. 105, 048701. 10.1103/PhysRevLett.105.048701 (doi:10.1103/PhysRevLett.105.048701) [DOI] [PubMed] [Google Scholar]
- 112.Gómez-Gardeñes J, Reinares I, Arenas A, Floría LM. 2012. Evolution of cooperation in multiplex networks. Sci. Rep. 2, 620. 10.1038/srep00620 (doi:10.1038/srep00620) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 113.Meloni S, Buscarino A, Fortuna L, Frasca M, Gomez-Gardeñes J, Latora V, Moreno Y. 2009. Effects of mobility in a population of prisoner's dilemma players. Phys. Rev. E 79, 067101. 10.1103/PhysRevE.79.067101 (doi:10.1103/PhysRevE.79.067101) [DOI] [PubMed] [Google Scholar]
- 114.Chen Z, Gao J, Cai Y, Xu X. 2011. Evolution of cooperation among mobile agents. Physica A 390, 1615–1622 10.1016/j.physa.2011.01.004 (doi:10.1016/j.physa.2011.01.004) [DOI] [Google Scholar]
- 115.Zhang J, Wang W-Y, Du W-B, Cao X-B. 2011. Evolution of cooperation among mobile agents with heterogenous view radius. Physica A 390, 2251–2257 10.1016/j.physa.2011.02.036 (doi:10.1016/j.physa.2011.02.036) [DOI] [Google Scholar]
- 116.Cardillo A, Meloni S, Gómez-Gardeñes J, Moreno Y. 2012. Velocity-enhanced cooperation of moving agents playing public goods games. Phys. Rev. E 85, 067101. 10.1103/PhysRevE.85.067101 (doi:10.1103/PhysRevE.85.067101) [DOI] [PubMed] [Google Scholar]
- 117.Helbing D, Yu W. 2009. The outbreak of cooperation among success-driven individuals under noisy conditions. Proc. Natl Acad. Sci. USA 106, 3680–3685 10.1073/pnas.0811503106 (doi:10.1073/pnas.0811503106) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 118.Jiang L-L, Wang W-X, Lai Y-C, Wang B-H. 2010. Role of adaptive migration in promoting cooperation in spatial games. Phys. Rev. E 81, 036108. 10.1103/PhysRevE.81.036108 (doi:10.1103/PhysRevE.81.036108) [DOI] [PubMed] [Google Scholar]
- 119.Yang H-X, Wu Z-X, Wang B-H. 2010. Role of aspiration-induced migration in cooperation. Phys. Rev. E 81, 065101(R). 10.1103/PhysRevE.81.065101 (doi:10.1103/PhysRevE.81.065101) [DOI] [PubMed] [Google Scholar]
- 120.Lin Y-T, Yang H-X, Wu Z-X, Wang B-H. 2011. Promotion of cooperation by aspiration-induced migration. Physica A 390, 77–82 10.1016/j.physa.2010.07.034 (doi:10.1016/j.physa.2010.07.034) [DOI] [Google Scholar]
- 121.Roca CP, Helbing D. 2011. Emergence of social cohesion in a model society of greedy, mobile individuals. Proc. Natl Acad. Sci. USA 108, 11 370–11 374. 10.1073/pnas.1101044108 (doi:10.1073/pnas.1101044108) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 122.Cong R, Wu B, Qiu Y, Wang L. 2012. Evolution of cooperation driven by reputation-based migration. PLoS ONE 7, e35776. 10.1371/journal.pone.0035776 (doi:10.1371/journal.pone.0035776) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 123.Xia C-Y, Meloni S, Moreno Y. 2012. Effects of environment knowledge on agglomeration and cooperation in spatial public goods games. Adv. Complex Syst. 15, 1250056. 10.1142/S0219525912500567 (doi:10.1142/S0219525912500567) [DOI] [Google Scholar]
- 124.Chen X, Szolnoki A, Perc M. 2012. Risk-driven migration and the collective-risk social dilemma. Phys. Rev. E 86, 036101. 10.1103/PhysRevE.86.036101 (doi:10.1103/PhysRevE.86.036101) [DOI] [PubMed] [Google Scholar]
- 125.Wang Z, Szolnoki A, Perc M. 2012. Percolation threshold determines the optimal population density for public cooperation. Phys. Rev. E 85, 037101. 10.1103/PhysRevE.85.037101 (doi:10.1103/PhysRevE.85.037101) [DOI] [PubMed] [Google Scholar]
- 126.Zhang J, Zhang C, Chu T. 2011. The evolution of cooperation in spatial groups. Chaos Solitons Fractals 44, 131–136 10.1016/j.chaos.2011.01.002 (doi:10.1016/j.chaos.2011.01.002) [DOI] [Google Scholar]
- 127.Wu T, Fu F, Wang L. 2009. Individual's expulsion to nasty environment promotes cooperation in public goods games. EPL 88, 30011. 10.1209/0295-5075/88/30011 (doi:10.1209/0295-5075/88/30011) [DOI] [Google Scholar]
- 128.Wu T, Fu F, Wang L. 2009. Partner selections in public goods games with constant group size. Phys. Rev. E 80, 026121. 10.1103/PhysRevE.80.026121 (doi:10.1103/PhysRevE.80.026121) [DOI] [PubMed] [Google Scholar]
- 129.Zhang H-F, Liu R-R, Wang Z, Yang H-X, Wang B-H. 2011. Aspiration-induced reconnection in spatial public-goods game. EPL 94, 18006. 10.1209/0295-5075/94/18006 (doi:10.1209/0295-5075/94/18006) [DOI] [Google Scholar]
- 130.Zhang C, Zhang J, Xie G, Wang L. 2011. Coevolving agent strategies and network topology for the public goods games. Eur. Phys. J. B 80, 217–222 10.1140/epjb/e2011-10470-2 (doi:10.1140/epjb/e2011-10470-2) [DOI] [Google Scholar]
- 131.Janssen MA, Goldstone RL. 2006. Dynamic-persistence of cooperation in public good games when group size dynamic. J. Theor. Biol. 243, 134–142 10.1016/j.jtbi.2006.06.012 (doi:10.1016/j.jtbi.2006.06.012) [DOI] [PubMed] [Google Scholar]
- 132.Liu R-R, Jia C-X, Wang B-H. 2010. Heritability promotes cooperation in spatial public goods games. Physica A 389, 5719–5724 10.1016/j.physa.2010.08.043 (doi:10.1016/j.physa.2010.08.043) [DOI] [Google Scholar]
- 133.Shi D-M, Yang H-X, Hu M-B, Du W-B, Wang B-H, Cao X-B. 2009. Preferential selection promotes cooperation in spatial public goods game. Physica A 388, 4646–4650 10.1016/j.physa.2009.07.031 (doi:10.1016/j.physa.2009.07.031) [DOI] [Google Scholar]
- 134.Zhang H, Shi D, Liu R, Wang B. 2012. Dynamic allocation of investments promotes cooperation in spatial public goods game. Physica A 391, 2617–2622 10.1016/j.physa.2011.12.005 (doi:10.1016/j.physa.2011.12.005) [DOI] [Google Scholar]
- 135.Perc M. 2011. Success-driven distribution of public goods promotes cooperation but preserves defection. Phys. Rev. E 84, 037102. 10.1103/PhysRevE.84.037102 (doi:10.1103/PhysRevE.84.037102) [DOI] [PubMed] [Google Scholar]
- 136.Perc M, Szolnoki A. 2010. Coevolutionary games: a mini review. BioSystems 99, 109–125 10.1016/j.biosystems.2009.10.003 (doi:10.1016/j.biosystems.2009.10.003) [DOI] [PubMed] [Google Scholar]
- 137.Smaldino P, Lubell M. 2011. An institutional mechanism for assortment in an ecology of games. PLoS ONE 6, e23019. 10.1371/journal.pone.0023019 (doi:10.1371/journal.pone.0023019) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 138.Wakano JY. 2007. Evolution of cooperation in spatial public goods games with common resource dynamics. J. Theor. Biol. 247, 616–622 10.1016/j.jtbi.2007.04.008 (doi:10.1016/j.jtbi.2007.04.008) [DOI] [PubMed] [Google Scholar]
- 139.Wakano JY, Nowak MA, Hauert C. 2009. Spatial dynamics of ecological public goods. Proc. Natl Acad. Sci. USA 106, 7910–7914 10.1073/pnas.0812644106 (doi:10.1073/pnas.0812644106) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 140.Wakano JY, Hauert C. 2011. Pattern formation and chaos in spatial ecological public goods games. J. Theor. Biol. 268, 30–38 10.1016/j.jtbi.2010.09.036 (doi:10.1016/j.jtbi.2010.09.036) [DOI] [PubMed] [Google Scholar]
- 141.Andreoni J, Harbaugh W, Vesterlund L. 2003. The carrot or the stick: rewards, punishments, cooperation. Am. Econ. Rev. 93, 893–902 10.1257/000282803322157142 (doi:10.1257/000282803322157142) [DOI] [Google Scholar]
- 142.Hilbe C, Sigmund K. 2010. Incentives and opportunism: from the carrot to the stick. Proc. R. Soc. B 277, 2427–2433 10.1098/rspb.2010.0065 (doi:10.1098/rspb.2010.0065) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 143.Gneezy A, Fessler DMT. 2012. Conflict, sticks and carrots: war increases prosocial punishments and rewards. Proc. R. Soc. B 279, 219–223 10.1098/rspb.2011.0805 (doi:10.1098/rspb.2011.0805) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 144.Herrmann B, Thoni C, Gachter S. 2008. Antisocial punishment across societies. Science 319, 1362–1367 10.1126/science.1153808 (doi:10.1126/science.1153808) [DOI] [PubMed] [Google Scholar]
- 145.Nakamaru M, Iwasa Y. 2006. The evolution of altruism and punishment: role of selfish punisher. J. Theor. Biol. 240, 475–488 10.1016/j.jtbi.2005.10.011 (doi:10.1016/j.jtbi.2005.10.011) [DOI] [PubMed] [Google Scholar]
- 146.Hauert C. 2010. Replicator dynamics of reward and reputation in public goods games. J. Theor. Biol. 267, 22–28 10.1016/j.jtbi.2010.08.009 (doi:10.1016/j.jtbi.2010.08.009) [DOI] [PubMed] [Google Scholar]
- 147.Milinski M, Semmann D, Krambeck H-J. 2002. Reputation helps to solve the ‘tragedy of the commons’. Nature 415, 424–426 10.1038/415424a (doi:10.1038/415424a) [DOI] [PubMed] [Google Scholar]
- 148.Semmann D, Krambeck H-J, Milinski M. 2004. Strategic investment in reputation. Behav. Ecol. Sociobiol. 56, 248–252 10.1007/s00265-004-0782-9 (doi:10.1007/s00265-004-0782-9) [DOI] [Google Scholar]
- 149.Dreber A, Rand DG, Fudenberg D, Nowak MA. 2008. Winners don't punish. Nature 452, 348–351 10.1038/nature06723 (doi:10.1038/nature06723) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 150.Santos FC, Pacheco JM. 2011. Risk of collective failure provides an escape from the tragedy of the commons. Proc. Natl Acad. Sci. USA 108, 10 421–10 425 10.1073/pnas.1015648108 (doi:10.1073/pnas.1015648108) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 151.Van Segbroeck S, Pacheco JM, Lenaerts T, Santos FC. 2012. Emergence of fairness in repeated group interactions. Phys. Rev. Lett. 108, 158104. 10.1103/PhysRevLett.108.158104 (doi:10.1103/PhysRevLett.108.158104) [DOI] [PubMed] [Google Scholar]
- 152.Traulsen A, Nowak MA. 2006. Evolution of cooperation by multilevel selection. Proc. Natl Acad. Sci. USA 103, 10 952–10 955 10.1073/pnas.0602530103 (doi:10.1073/pnas.0602530103) [DOI] [PMC free article] [PubMed] [Google Scholar]
- 153.Castellano C, Fortunato S, Loreto V. 2009. Statistical physics of social dynamics. Rev. Mod. Phys. 81, 591–646 10.1103/RevModPhys.81.591 (doi:10.1103/RevModPhys.81.591) [DOI] [Google Scholar]
- 154.Bowles S, Gintis H. 2011. A cooperative species: human reciprocity and its evolution. Princeton, NJ: Princeton University Press [Google Scholar]
- 155.Hrdy SB. 2011. Mothers and others: the evolutionary origins of mutual understanding. Cambridge, MA: Harvard University Press [Google Scholar]
- 156.Nowak MA, Highfield R. 2011. Supercooperators: altruism, evolution, and why we need each other to succeed. New York, NY: Free Press [Google Scholar]