

It is fundamental to human experience that we live in a world of perceived intentional agents. Being able to see beyond the physical properties of an action and interpret it in terms of underlying intentions allows us to interact successfully with other people, to learn from them, and to predict and explain their behavior. For these reasons, interpreting others’ actions as structured by intentions plays a foundational role in linguistic, cognitive, and social development.
It is not surprising, therefore, that this basic aspect of human cognition emerges early in life. Findings from across laboratories and paradigms converge in indicating that infants are sensitive to the goal-directed actions of others, both in distinguishing them from non-goal-directed actions and in detecting the apparent goal of an action. In visual habituation experiments, for example, infants respond selectively to the goal structure of others’ actions, attending to goals rather than to the physical details of the action (e.g., Biro & Leslie, 2007; Gergely & Csibra, 2003; Woodward, 1998; 2005). This same sensitivity is evident in infants’ overt social responses (Tomasello, Carpenter, Call, Behne, & Moll, 2005), including their imitation of others’ actions (Meltzoff, 2007). To illustrate, Meltzoff (1995) found that 18-month-old infants imitate others’ apparent goals, rather than their precise patterns of movement, even when the goal is unfulfilled.
Although there is broad-grained converging evidence that infants can recover the goal structure of others’ actions, at a finer grain, a number of unresolved questions remain. Several of these concern the extent to which young infants’ sensitivity to goals derives from general, abstract goal concepts versus more limited or specialized abilities. This general question bears on the robustness of young infants’ goal representations, both in terms of the range of events to which they extend, and in terms of the range of behavioral responses they support. For adults, abstract conceptions of goals guide analysis of a broad range of events, including, but not limited to the actions of humans. Further, these abstract goal concepts fluidly drive social behavior at many levels, from online regulation of visual attention to the regulation of complex social interactions (see Shipley & Zacks, 2008). Do young infants, like adults, possess sufficiently abstract goal representations such that they can perceive “goals” even in unusual events? Further, for infants, as for adults, does this goal analysis support a broad range of behavioral and social responses? Apparent disagreements in the existing literature indicate that further research is needed to inform these questions.
To start, there is mixed evidence concerning the range of events that young infants can perceive as goal-directed. On the one hand, early habituation studies found that young infants did not ascribe goals to inanimate objects. Five- and six-month-old infants selectively attended to goals for events involving human hands, but did not do so for matched events involving inanimate objects such as rods or claws (Woodward, 1998), or for events in which the actor’s hand was disguised by a metallic glove (Guajardo & Woodward, 2004). Hofer and colleagues (Hofer, Hauf, & Aschersleben, 2005) replicated the former result at 6 months and found that by 9 months, infants responded to claw events as goal-directed, but only when they could see that a human hand held the claw.
However, other recent findings indicate that under some conditions, infants treat inanimate or unusual entities as goal-directed agents (Gergely, Nadasdy, Csibra, & Biro, 1995; Kuhlmeier, Wynn, & Bloom, 2003; Johnson, Booth, & O’Hearn, 2001; Shimizu & Johnson, 2004; Biro & Leslie, 2007; Luo & Baillargeon, 2005; Csibra, 2008). As one example, Luo and Baillargeon (2005) showed 5-month-old infants events in which an apparently self-propelled cardboard box moved toward and touched one of two objects. To ask whether infants viewed the box’s movements as goal-directed, Luo and Baillargeon adapted the paradigm developed by Woodward (1998): following habituation to the box moving to one “goal,” the object’s positions were reversed and infants viewed test events that altered either the box’s goal or the path of motion taken by the box. Infants showed a stronger novelty response (longer looking) when the goal object changed, thus supporting the conclusion that they had viewed the box’s movements as goal-directed. Luo and Baillargeon conclude that the box’s self-propelled motion, absent in the inanimate conditions of Woodward (1998) is what likely makes infants interpret its actions as goal-directed. However, there still remains some debate about the full range of cues that might contribute to infants’ goal analysis (Biro & Leslie, 2007).
A second unresolved issue is the extent to which young infants’ goal analysis drives only their visual responses or instead robustly informs a broader range of social behaviors. After 12 months, goal analysis is evident in infants’ behavior across a broad range of situations, including visual habituation experiments (e.g. Gergely et al., 1995; Kuhlmeier et al., 2003; Sodian & Thoermer, 2004; Sommerville & Woodward, 2005), experiments that draw on more overt behavioral responses (Behne, Carpenter, Call, & Tomasello, 2005; Baldwin & Moses, 1996; Brooks & Meltzoff, 2002; Gergely, Bekkering, & Kiraly, 2002; Meltzoff, 1995; Moll & Tomasello, 2007; Warneken & Tomasello, 2006), and observational studies of social behavior (Bates, Benigni, Bretherton, Camaioni, & Volterra, 1979; Bretherton, 1991; Tomasello et al., 2005).
However, in infants younger than 12 months, clear evidence for goal detection comes almost exclusively from visual habituation experiments (e.g., Woodward, 1998; Luo & Baillargeon, 2005; Biro & Leslie, 2007). The lack of evidence from studies of overt responses in young infants raises the question of whether infants’ goal analysis is initially limited to detecting visual patterns and driving visual responses, or instead supports a broader repertoire of social reasoning and behavior. Indeed, the lack of behavioral evidence for goal-detection prior to 9-12 months has sometimes invited the conclusion that young infants do not discern the goals behind others’ actions (e.g. Behne et al., 2005; Tomasello et al., 2005).
Recently, however, Hamlin, Hallinan, and Woodward (2008) addressed this gap in the literature by asking whether at 7 months, infants’ goal analysis is evident in their overt social responses. Hamlin and colleagues showed infants an action on one of two toys and then gave infants the opportunity to act on the toys themselves. Infants viewed either the familiar goal-directed action (grasping), or a manual action that was novel and ambiguous (touching with the back of the hand) directed at one of two small toys. When given a chance to select one of the toys, infants who had observed goal-directed grasping systematically chose the object that had been the actor’s goal. In contrast, infants who had observed the ambiguous action chose randomly. Infants responded in this way even when the actor reached toward the object but was unable to complete the grasp because the toy was too far away. Follow-up analyses verified that infants’ selective choice of the goal object was not due to differences in how infants’ attention was entrained by the grasping versus ambiguous actions. Visual habituation experiments have indicated that infants demonstrate a sensitivity to the goal structure of a reach toward one of two objects; Hamlin and colleagues’ results indicate that the same sensitivity is evident in infants’ overt responses to reaching events. Their findings also provide the first evidence that infants selectively reproduce the goal of reaching actions.
This paradigm provides a new means for gathering evidence about the breadth of infants’ goal detection. We modeled our experimental events as closely as possible after ones that younger infants respond to as though they were goal-directed in the visual habituation paradigm developed by Luo and Baillargeon (2005). In Experiment 1, we showed 7-month-old infants a goal-directed action toward one of two objects, executed by either a hand or a “self-propelled” box similar to the one used by Luo and Baillargeon. Given that infants showed similar sensitivity to the movements of a human hand and the inanimate box in their perceptual responses, our question was whether they would show a similar sensitivity to both in their overt responses; that is, whether infants would also reproduce the goal of the box in the same way as the goal of the hand.
Experiment 1
Methods
Participants
Thirty-two full term 7-month-old infants (ranging from 6 months 16 days to 7 months 15 days) participated in the first study1. Sixteen infants (8 girls and 8 boys; mean age=7;0) saw an experimenter reach her hand through a cardboard barrier to one of two toys and grasp it (hand condition) and sixteen (8 girls and 8 boys; mean age=7;1) saw a seemingly self-propelled yellow box come through the same barrier and make its way to one of the two toys (box condition) on a tray.
Procedure
Each infant sat on his or her parent’s lap at a table, facing the experimenter, who was 76 cm away. Directly behind the experimenter was a camera focused on the infant, and behind the infant and parent was a camera focused on the display. The procedure began with a familiarization phase in which each of the 16 experimental toys were briefly presented to the infants in a random order on alternating sides of a rectangular 76 cm × 23 cm black laminated foam core tray. During this phase infants were given 30 seconds with each toy during which they had the opportunity to touch and tactilely explore that toy.
After the familiarization phase, the experimenter set up a black foam core barrier (81 cm × 34 cm) in front of her such that her face was visible to the infant above the barrier. The barrier was sufficiently low so that the experimenter could provide social cues to the infant that might support their tendency to reproduce her goals. These cues were present in both the hand and box conditions. The experimenter then brought either her hand or the yellow box through the barrier (depending on the condition) and moved it around on the table to demonstrate its apparent self-propelledness and its shuffling motion for approximately 10 seconds to familiarize the infant with its motion. The hand or box would emerge from an opening in the barrier and would move from the center of the tray, over to one side, over to the other side, and then back through the opening, while turning to face the direction in which it was moving.
During test trials the toys were presented in pairs, 28 cm apart from one another centered on the same tray used in the familiarization phase. To start the demonstration, a second experimenter, hidden behind a partition to one side of the table, placed the tray containing the two toys onto the table directly in front of the experimenter and out of reach of the infant. The experimenter first ensured that the infant looked at each of the two toys, making noise near either side if necessary to direct the infant’s attention that way. Next, she made brief eye contact by calling the infant’s attention to herself, and then held eye contact with the target toy while either her hand or the yellow box was in contact with the same toy. In both conditions, verbalizations accompanied the actions. The experimenter said “Hi! [making eye contact with the infant] Look! [turning to look at the target toy as the box or hand emerged] Oooh! [approaching the target toy] Oooh! [while the hand or box was in contact with the target toy].” The experimenter reached contralaterally in the hand condition, with her hand coming out of a concealed opening in the center of the barrier, and in the box condition, the box emerged from the same location and made the same trajectory as the arm. In the box condition, the box oriented itself toward the target toy before moving toward it with a shuffling motion. Both actions resulted in an outcome in which the front face of the target toy was fully visible and the hand or box occupied approximately the same space on the tray (see Figure 1). After the demonstration, the experimenter withdrew her hand, established eye contact with the infant again by saying “Hi!” and then pushed the tray forward to within the infant’s reach while saying “Now it’s your turn!”
Figure 1.

Experiment 1 hand condition and box conditions
This procedure repeated for eight trials with a new pair of toys presented on each trial, and the experimenter alternated reaching left and right. Between infants, each toy was the target 50% of the time, and pair order, side of first reach, and side of each toy were counterbalanced.
Infants’ responses were coded from video by coders who were uninformed about test condition as well as the target toy in each individual trial. Choice was coded as the first toy the infant reached for and touched as long as contact was preceded by looking at the toy. If the infant touched a toy without first looking at it, and this touch drew the infant’s attention to that toy, the trial was coded as a mistrial. A second independent coder scored 9 of the infants, and the two coders agreed on 100% of the trials.
As in Hamlin and colleagues’ (2008) study, a concern in evaluating infants’ responses was the possibility that the hand and box events might have different effects on infants’ attention to the objects, which could in turn affect their subsequent object choice. To evaluate this possibility, infants’ attention to each toy and to the experimenter during the demonstration was coded frame-by-frame using a digital coding program (Mangold, 1998). To make it clear to coders what a gaze to each of these areas looked like, the second experimenter would draw infants’ attention to each of these areas by snapping in front of them, and label them on camera for the coder. Coders saw only the infant (not the modeled event) and were blind to condition. They coded the demonstration phase of each trial, beginning when the model first said “hi” and ending when the hand or box withdrew from the target object. A second independent coder coded nine babies, and the two coders’ judgments were strongly correlated (r = .81).
Results
The percentage of infants’ choices directed at the target toy is summarized in Figure 2. Infants in the hand condition chose the target significantly more than did infants in the box condition, t(30) = 4.27, p < .001. Infants in the hand condition systematically chose the target toy more often than would be expected by chance (50%), t(15) = 5.45, p < .001. In contrast, infants in the box condition did not differ from chance in their responses, t(15) = -1.41, p = .18.
Figure 2.
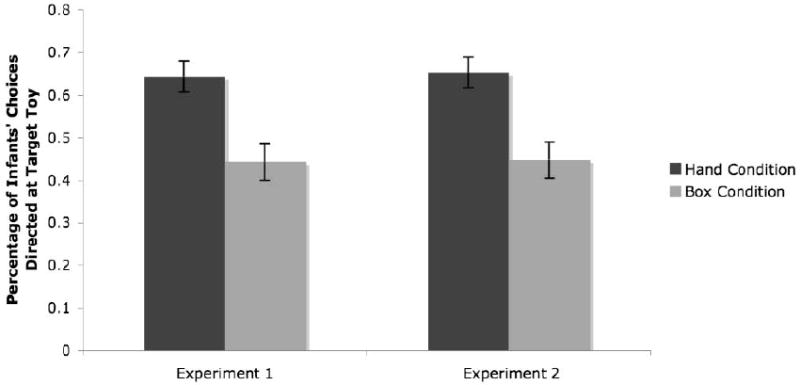
Percentage of infants’ choices directed at the target toy in Experiments 1 and 2
The coding of infants’ attention during the modeled actions (summarized in Table 1) revealed no difference between conditions in infants’ looking time in the direction of the target toy [t(30) = .16, p = .88], non-target toy, [t(30) = -.10, p = .92], or experimenter [t(30) = -.42, p = .68]. Infants looked longer at the target toy than the non-target toy in both the hand condition [t(15) = 4.02, p < .002] and the box condition [t(15) = 2.61, p < .03]. No correlation was found between the amount of looking toward the target toy and infants’ tendency to choose that toy in either condition (rhand = -.23, p = .38; rbox = -.16, p = .55). These results indicate that infants’ responses in the two conditions were not driven by differences in the extent to which the hand and box entrained infants’ attention on the target toy.
TABLE 1.
Mean Seconds of Attention Toward the Target Toy Minus Attention Toward the Non-target Toy During the Modeled Action (Measured in Seconds Looking Time)
| Experiment | Condition | Attention to Target
|
Attention to Non-Target
|
Attention to Experimenter
|
|||
|---|---|---|---|---|---|---|---|
| Mean | St Dev | Mean | St Dev | Mean | St Dev | ||
| 1 | Hand | 3.03 | 1.47 | 1.25 | .83 | 4.43 | 1.62 |
| Box | 2.92 | 2.44 | 1.29 | 1.25 | 4.78 | 2.92 | |
| 2 | Hand | 4.57 | .86 | 1.83 | .98 | 1.12 | .81 |
| Box | 5.33 | 1.18 | 1.78 | .88 | .69 | .78 | |
Discussion
When infants viewed an adult grasping one of two objects, they selectively reproduced the adult’s goal, reaching for the object she had just acted on. This finding replicates the results of Hamlin and colleagues (2008). In contrast, when infants viewed a self-propelled box that moved toward and contacted one of two toys, they did not reproduce the box’s apparent goal. This result differs from that reported by Luo and Baillargeon’s (2005) visual habituation experiments, in which infants responded to the box in the same manner as a human hand. We sought to model our events as closely as possible to those of Luo and Baillargeon, but in order to make the social context as natural as possible, we had one difference from Luo and Baillargeon’s events that might have affected infants’ responses. In both the hand and the box conditions, infants saw the presenting experimenter’s face above the back wall of the apparatus: this made the two conditions equivalent in terms of cues from the model (e.g. vocalizations and gaze direction), but differed from the box events used by Luo and Baillargeon. To test whether this difference can account for the difference in findings (perhaps the presence of the experimenter’s face was somehow confusing or made it less feasible that the box was self-propelled), in our second experiment we showed infants hand and box events in which the presenting experimenter was fully hidden behind the back wall of the apparatus and did not speak or produce other social cues.
Experiment 2
Methods
Participants
Thirty-two full term 7-month-old infants (ranging from 6 months 14 days to 7 months 15 days) participated in the second study2. Sixteen infants (8 girls and 8 boys; mean age=7;2) saw a hand come through a cardboard barrier to one of two toys and grasp it (hand condition) and sixteen (8 girls and 8 boys; mean age=7;0) saw a seemingly self-propelled yellow box come through the same barrier and make its way to one of the two toys (box condition).
Procedure
The procedure was the same as in Experiment 1, with the following exceptions: the experimenter reaching for the toys with her hand or the “self-propelled” box was fully occluded from the infant by a large screen (69 cm × 102 cm), and a second experimenter (who was visible to the infant) sat to one side of the table (see Figure 3). During the test phase, the second experimenter made the actions and vocalizations that the first experimenter had done before and after the event in Experiment 1. During the event, however, there was no vocalization; instead, as the hand or box moved toward and made contact with the target toy, the first experimenter used a squeaky toy to make squeaking noises contingent with its motion (such that it seemed that the sounds were coming from the hand or box).
Figure 3.

Experiment 2 hand condition and box conditions
Two independent coders agreed on infants’ choices in 100% of the trials, and independent attention coding was strongly correlated (r = .82).3
Results
The proportion of trials on which infants selected the target toy is summarized in Figure 2. As in Experiment 1, infants who saw the hand agent were more likely to select the target toy than were infants who saw the box agent, t(30) = 3.36, p < .003. Infants in the hand condition chose the target toy more often than would be expected by chance (50%), t(15) = 4.61, p < .001, while infants’ responses in the box condition did not differ from chance, t(15) = -.55, p = .59.
Again, the hand and box agents did not differentially attract the infants’ attention toward the direction of the target toy [t(27) = -2.00 p = .06], non-target toy, [t(27) = .14, p = .89], or experimenter [t(27) = 1.44, p = .16] (see Table 1). Infants looked longer at the target toy than the non-target toy in both the hand condition [t(15) = 7.75, p < .001] and the box condition [t(12) = 7.73, p < .001] . Infants’ attention to the goal was not reliably correlated with their tendency to choose the targeted toy (rhand = -.33, p = .22; rbox = .51, p = .08), indicating that the condition differences were again not driven by attentional differences.
Discussion
Experiment 2 addressed the concern that these findings might differ from Luo and Baillargeon’s (2005) results because of the visibility of the presenting experimenter’s face in our display. In Experiment 2, the presenting experimenter was fully hidden, but as in Experiment 1, infants selectively reproduced the goal of the experimenter’s hand, reaching for the same object she had just acted on. Infants who saw the box event, which, with the experimenter hidden, was now more visually identical to Luo and Baillargeon’s (2005) box event, still chose randomly, not reproducing the box’s apparent goal. These findings suggest that it was not the presence of the experimenter’s face that accounted for the results; instead, infants seem to differ in their propensity to reproduce the goals of human versus non-human agents.
General Discussion
We began with the question of whether young infants’ goal analysis is local and limited, or instead, general and abstract. The current findings, together with the existing record, suggest that neither characterization is entirely correct. On the one hand, our results support the conclusion that young infants’ goal analysis is robust in terms of its behavioral expression. When infants viewed a human agent reach for one of two toys, they spontaneously reproduced her goal when given access to the toys. These results lend support to the conclusion that, like older infants, 7-month-olds express their analysis of others’ goals not only in their visual responses, but also in their overt actions.
However, our findings also suggest limits to the extent to which infants’ goal-based responses extend robustly to a broad range of events. In contrast with findings from Luo and Baillargeon (2005) and others, infants in the current experiments did not evidence goal-based responding for events involving an inanimate agent. Although infants’ visual responses indicate that they are able perceive goal structure in events like the ones we showed them, we found that these cues were not sufficient to lead them to reproduce the object’s apparent goal.
Together with prior findings, our results support the conclusion that infants’ sensitivity to goals is more nuanced than previously appreciated, in that different methodologies may tap into this sensitivity in different ways. In particular, infants’ visual responses seem more likely to reveal sensitivity to goal structure in unusual events than do their overt behavioral responses. Indeed, our findings are generally consistent other findings from studies of imitation. Several studies report that infants imitate the actions of people (Legerstee, 1991; Meltzoff, 1995) and humanoid agents (Johnson et al., 2001), but not those of inanimate objects (Legerstee, 1991; Meltzoff, 1995).
One potential explanation for these differences in findings is that infants may have a more robust ability to detect goals in human actions than in novel events. Several factors may contribute to the relative robustness of infants’ ability to discern the goal structure of human actions versus inanimate movements. By 7 months, infants have a great deal of experience producing goal-directed reaches, and self-produced actions have shown to support sensitivity to others’ goal-directed actions (Sommerville et al., 2005; Sommerville, Hildebrand, & Crane, 2008). In addition, because human reaches are more visually familiar to infants than are the self-propelled movements of boxes, infants may more easily encode information from them. Thus, infants may show a sensitivity to the “goals” of inanimate events more readily in visual habituation experiments because visual responses are less demanding, and thus more sensitive, than methods than require infants to make overt responses.
In line with this possibility, infants’ responses to novel events in visual habituation experiments have been shown to vary depending on the level of support provided within the context of the experimental events. For example, Hofer and colleagues (2005) found that 9-month-olds did not spontaneously treat the movements of a mechanical claw as goal-directed, but that they were able to do so when shown that the claw was controlled by a person (see also Guajardo & Woodward, 2004). Similarly, Biro and Leslie (2007) found that infants required more contextual support to respond to inanimate events (as compared to human actions) as goal-directed, and that younger infants required more support than older infants to do so.
To determine whether the differences in findings between visual habituation and imitation paradigms are attributable to the relative robustness of infants’ sensitivity to apparent goals in human versus inanimate movements, further work is needed in which the task demands in the procedures requiring overt action are reduced. Infants responded systematically to human movements in the current paradigm, and though infants did not do so for the inanimate events, these events contained supportive cues that were sufficient to yield systematic findings in prior habituation studies. Infants might, however, respond systematically to the inanimate events in the current paradigm if additional cues to agency were present, or if the information processing demands of the task were further simplified. For example, in visual habituation or familiarization experiments infants view the exact same event repeatedly before their response to it is assessed on test trials. In contrast, infants in the current experiments viewed the same kind of event on each trial, but the target object and side of movement varied from trial to trial. Although we saw no difference between earlier and later trials, it is possible that repeated exposure to the box acting on the same toy would increase infants’ tendency to respond to the box’s actions as goal-directed. Thus, further research is needed to test whether the differences in findings between paradigms are a product of the relative difficulty of the tasks and the relative robustness of infants’ sensitivity to goal structure in human versus inanimate events.
Alternatively, it is possible that infants’ differential responses to inanimate “agents” in imitation and habituation paradigms reflect the expression of distinct systems for detecting goal-related information. These different systems may be tuned to different kinds of contexts and input stimuli and drive different kinds of responses. One system may serve to detect visual patterns that correlate with agency; this system could respond to patterns in abstract displays as well as in human movements, and be evident in infants’ visual responses to changes in these patterns. A second system may be tuned more specifically to human actions and responses that are integral to engagement with social partners, including imitation. Thus, the first system may account for infants’ responses to inanimate events in visual habituation experiments and the second may account for infants’ more selective responses in imitation paradigms. Consistent with this possibility, Falck-Yttr and colleagues (Falck-Yttr, Gredebäck, & von Hofsten, 2006) reported that on-line visual anticipation of actions (a process integral to well-structured social interaction) also appears to be selective for human actions, rather than inanimate object movements, in both infants and adults.
Current evidence cannot resolve which, if either, of these accounts is most accurate, but these divergences between different response measures indicate that moving forward will require gathering multiple sources of evidence for infants’ action knowledge and goal analysis using varied methodologies.
Footnotes
An additional 2 infants were tested but did not complete the study due to fussiness, and 3 infants who completed the study were eliminated from analyses due to side biases (i.e. only reaching to one side of the tray).
One additional infant was tested but did not complete the study due to fussiness, and one infant was excluded from analyses due to a side bias.
Four trials were excluded from analysis due to the fact that infant did not touch or grasp either toy within 30 seconds.
Contributor Information
Neha Mahajan, Yale University.
Amanda Woodward, University of Maryland.
References
- Baldwin DA, Moses LJ. The ontogeny of social information gathering. Child Development. 1996;67(5):1915–1939. [Google Scholar]
- Bates E, Benigni L, Bretherton I, Camaioni L, Volterra V. The emergence of symbols: Cognition and communication in infancy. New York: Academic Press; 1979. [Google Scholar]
- Behne T, Carpenter M, Call J, Tomasello M. Unwilling versus unable: Infants’ understanding of intentional action. Developmental Psychology. 2005;41:328–37. doi: 10.1037/0012-1649.41.2.328. [DOI] [PubMed] [Google Scholar]
- Biro S, Leslie A. Infants’ perception of goal-directed actions: Development through cue-based bootstrapping. Developmental Science. 2007;10:379–398. doi: 10.1111/j.1467-7687.2006.00544.x. [DOI] [PubMed] [Google Scholar]
- Bretherton I. Intentional communication and the development of an understanding of mind. In: Frye D, Moore C, editors. Children’s theories of mind: Mental states and social understanding. Hillsdale, NJ: L. Erlbaum Associates; 1991. pp. 49–75. [Google Scholar]
- Brooks R, Meltzoff AN. The importance of eyes: How infants interpret adult looking behavior. Developmental Psychology. 2002;38(6):958–966. doi: 10.1037//0012-1649.38.6.958. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Csibra G. Goal attribution to inanimate agents by 6.5-month-old infants. Cognition. 2008;107(2):705–717. doi: 10.1016/j.cognition.2007.08.001. [DOI] [PubMed] [Google Scholar]
- Falck-Yttr T, Gredebäck G, von Hofsten C. Infants predict other people’s action goals. Nature Neuroscience. 2006;9:878–879. doi: 10.1038/nn1729. [DOI] [PubMed] [Google Scholar]
- Gergely G, Bekkering H, Kiraly I. Rational imitation in preverbal infants. Nature. 2002;415(6873):755. doi: 10.1038/415755a. [DOI] [PubMed] [Google Scholar]
- Gergely G, Csibra G. Teleological reasoning in infancy: The naive theory of rational action. Trends in Cognitive Sciences. 2003;7(7):287–292. doi: 10.1016/s1364-6613(03)00128-1. [DOI] [PubMed] [Google Scholar]
- Gergely G, Nadasdy Z, Csibra G, Biro S. Taking the intentional stance at 12 months of age. Cognition. 1995;56(2):165–193. doi: 10.1016/0010-0277(95)00661-h. [DOI] [PubMed] [Google Scholar]
- Guajardo JJ, Woodward AL. Is agency skin-deep? Surface attributes influence infants’ sensitivity to goal-directed action. Infancy. 2004;6:361–384. [Google Scholar]
- Hamlin JK, Hallinan EV, Woodward AL. Do as I do: 7-month-old infants selectively reproduce others’ goals. Developmental Science. 2008;11(4):487–494. doi: 10.1111/j.1467-7687.2008.00694.x. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Hofer T, Hauf P, Aschersleben G. Infant’s perception of goal-directed actions performed by a mechanical device. Infant Behavior and Development. 2005;28(4):466–480. [Google Scholar]
- Johnson SC, Booth A, O’Hearn K. Inferring the goals of a nonhuman agent. Cognitive Development. 2001;16(1):637–656. [Google Scholar]
- Kuhlmeier V, Wynn K, Bloom P. Attribution of dispositional states by 12-month-olds. Psychological Science. 2003;14(5):402–408. doi: 10.1111/1467-9280.01454. [DOI] [PubMed] [Google Scholar]
- Legerstee M. The role of person and object in eliciting early imitation. Journal of Experimental Child Psychology. 1991;51:423–433. doi: 10.1016/0022-0965(91)90086-8. [DOI] [PubMed] [Google Scholar]
- Luo Y, Baillargeon R. Can a self-propelled box have a goal? Psychological Science. 2005;16(8):601–608. doi: 10.1111/j.1467-9280.2005.01582.x. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Mangold P. Interact [computer software] Arnstorf, Germany: Mangold International; 1998. [Google Scholar]
- Meltzoff AN. Understanding the intentions of others: Re-enactment of intended acts by 18-month-old children. Developmental Psychology. 1995;31:1–16. doi: 10.1037/0012-1649.31.5.838. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Meltzoff AN. The ‘like me’ framework for recognizing and becoming an intentional agent. Acta Psychologica. 2007;124:26–43. doi: 10.1016/j.actpsy.2006.09.005. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Moll H, Tomasello M. How 14- and 18-Month-Olds Know What Others Have Experienced. Developmental Psychology. 2007;43(2):309–317. doi: 10.1037/0012-1649.43.2.309. [DOI] [PubMed] [Google Scholar]
- Shimizu YA, Johnson SC. Infants’ attribution of a goal to a morphologically unfamiliar agent. Developmental Science. 2004;7(4):425–430. doi: 10.1111/j.1467-7687.2004.00362.x. [DOI] [PubMed] [Google Scholar]
- Shipley TF, Zacks JM. Understanding events: From perception to action. New York: Oxford University Press; 2008. [Google Scholar]
- Sodian B, Thoermer C. Infants’ understanding of looking, pointing, and reaching as cues to goal-directed action. Journal of Cognition & Development. 2004;5(3):289–316. [Google Scholar]
- Sommerville JA, Hildebrand EA, Crane CC. Experience matters: The impact of doing versus watching on infants’ subsequent perception of tool-use events. Developmental Psychology. 2008;44(5):1249–1256. doi: 10.1037/a0012296. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Sommerville JA, Woodward AL. Pulling out the intentional structure of action: The relation between action processing and action production in infancy. Cognition. 2005;95:1–30. doi: 10.1016/j.cognition.2003.12.004. [DOI] [PMC free article] [PubMed] [Google Scholar]
- Tomasello M, Carpenter M, Call J, Behne T, Moll H. Understanding and sharing intentions: The origins of cultural cognition. Behavioral and Brain Sciences. 2005;28(5):675–735. doi: 10.1017/S0140525X05000129. [DOI] [PubMed] [Google Scholar]
- Warneken F, Tomasello M. Altruistic Helping in Human Infants and Young Chimpanzees. Science. 2006;311(5765):1301–1303. doi: 10.1126/science.1121448. [DOI] [PubMed] [Google Scholar]
- Woodward AL. Infants selectively encode the goal object of an actor’s reach. Cognition. 1998;69:1–34. doi: 10.1016/s0010-0277(98)00058-4. [DOI] [PubMed] [Google Scholar]
- Woodward AL. The infant origins of intentional understanding. In: Kail RV, editor. Advances in Child Development and Behavior. Vol. 33. Oxford: Elsevier; 2005. pp. 229–262. [DOI] [PubMed] [Google Scholar]