

Abstract
The authors describe a cooperative controller that combines the knee joint actuation of an externally powered lower limb exoskeleton with the torque and power contribution from the electrically stimulated quadriceps muscle group. The efficacy of combining these efforts is experimentally validated with a series of weighted leg lift maneuvers. Measurements from these experiments indicate that the control approach effectively combines the respective efforts of the motor and muscle, such that good control performance is achieved, with substantial torque and energy contributions from both the biological and non-biological actuators.
I. Introduction
A number of interventions have been developed to facilitate legged mobility in paraplegics. Passive approaches for legged mobility assistance include leg braces, knee-ankle-foot-orthoses (KAFOs), and reciprocating-gait-orthoses (RGOs). In an effort to improve upon these approaches, researchers have used sources of power to facilitate legged locomotion. Such sources of power can generally be categorized as either metabolic or external. Specifically, a number of researchers have investigated the use of functional electrical stimulation (FES) to artificially control leg muscle contraction, thereby utilizing the metabolic power supply of the paraplegic subject to facilitate legged locomotion. Some of the research efforts in this regard include [1–3]. Note that, in addition to providing power for locomotion, FES-aided gait has also been shown to provide a number of associated physiological benefits, some of which include increased muscle strength, increased bone density, decreased spasticity, and improved cardiovascular health [4–6]. Despite this, FES-based systems entail a number of challenges; most notably, (1) in the absence of adequate sensory information muscles are difficult to control, and (2) the rapid muscle fatigue promote by the synchronous recruitment of muscle fibers occurred in FES.
Rather than utilize the metabolic power source provided by stimulated muscle, other researchers have developed lower limb exoskeletons, which utilize external power (e.g., a battery pack) to provide a source of motive power to facilitate legged locomotion. Some of the efforts in this regard include [7–15]. This approach avoids the controllability and fatigue issues associated with FES, but such approaches do not offer the physiological benefits associated with FES, and also forego the convenience of leveraging the metabolic power supply.
In this paper the authors combine the use of an externally powered lower limb exoskeleton with FES, such that the resulting system maintains a high degree of controllability and circumvents control problems associated with muscle fatigue; while also leveraging the availability of the metabolic power and presumably providing physiological benefits associated with FES. The proposed approach is somewhat similar to a hybrid FES approach as developed and described by others, see for example [16–20], but unlike previously described hybrid approach known by the authors, this paper combines FES with a fully externally powered lower limb exoskeleton. The authors describe the control approach developed to coordinate the cooperation between the stimulated muscle and the exoskeleton motors. The cooperative controller was implemented in an experiment in which the quadriceps of a paraplegic individual were controlled in conjunction with an existing lower limb exoskeleton as described in [13–15]. Specifically, the cooperative controller coordinated the electrical stimulation of the right and left quadriceps muscle groups in conjunction with the respective knee motor of the exoskeleton, in order to provide coordinated control of the respective knee joint. The efficacy of the cooperative controller in combining muscle and motor efforts is demonstrated as described in the results section of the paper.
II. Lower Limb Exoskeleton Prototype
The Vanderbilt exoskeleton [13–15] is a fully powered lower limb orthosis, designed to allow a paraplegic user to stand and walk. The 12 kg (26.5 lb) device has five links and four articulations. The device is electrically actuated and it is powered by a 29.6 V lithium polymer battery that is contained in the hip piece of the unit. All the actuation and power transmission is in the thigh links as well as the electronics required for control. The exoskeleton is designed to be used with standard forearm crutches (or a walker) and a standard ankle foot orthoses (AFO).
III. Cooperative Controller Design
The essence of the control design is to use as much muscle effort as possible, and then “fill in” the remaining required joint torque with the externally powered joint actuator. As described in prior publications, in the absence of FES, the (externally powered) joint-level exoskeleton controllers, incorporate a proportional derivative (PD) control structure (see [14]). Assuming a constant stimulation frequency sufficient to provide a fused contraction, the nominal amplitude of muscle effort (i.e., strength of contraction) can be modulated in an FES controller by controlling the amount of current (i.e., amplitude) and/or pulse width of the stimulation waveform. Since the effect of modulating these two variables is essentially the same, the stimulation pulse width was held constant in this work, such that the muscle effort was regulated by modulating the stimulation amplitude.
In controlling muscle stimulation, one would ideally have a model of the muscle, describing the dynamic relationship between stimulation input and muscle torque output. Since the control approach does not attempt precise control of the muscle, and since the muscle is known to be characterized by a highly time-varying component, the control approach used here assumes a simplified description of muscle stimulation dynamics, characterized simply by a time delay and gain, and incorporates an adaptive control approach to effectively estimate these parameters. As such, the cooperative controller incorporates a gradient-based adaptive component that estimates the gain and phase characteristics of the muscle, and uses these estimates to adjust the relative magnitude and timing of the muscle stimulation; relative to the torque commands issued to the electric motor. A schematic of the cooperative controller is shown in Fig. 1.
Figure 1.
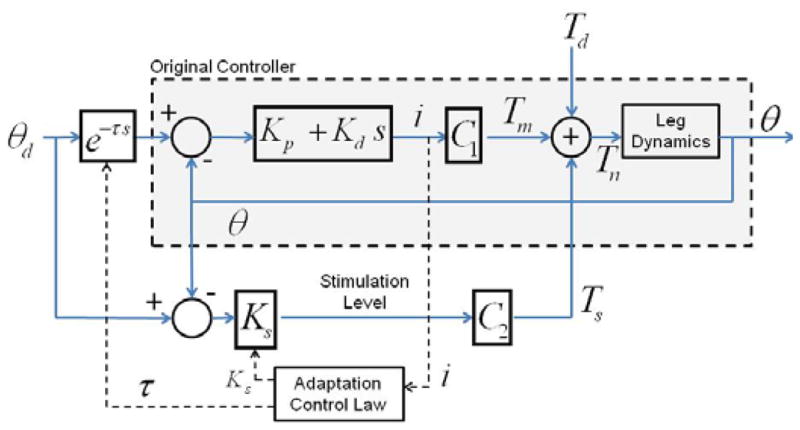
Block diagram of the motor controller supplemented with cooperative, adaptive control of FES.
Since, as previously mentioned, the control objective is to use as much muscle torque as possible, we can alternatively characterize the objective as minimizing the magnitude of actuator torque effort. Thus, the controller is derived by first establishing the cost functional
| (1) |
where Tm is the joint actuator torque which is the quantity to be minimized. The gain and phase of the muscle dynamics are characterized by Ks and τ respectively. Assuming the cost functional is a differentiable function of these characteristics, we can characterize the gradient of the cost functional as
| (2) |
Referring to the system structure shown in Fig. 1, we can write
| (3) |
where Ts is the torque provided by the muscle, Tn the net torque at the knee joint, and Td the joint torque disturbance caused by any external loading. In Fig. 1, c1 and c2 are conversion factors from current to torque and stimulation level to torque respectively. Taking the partial derivatives of Tm, as defined on the right of (3), with respect to the parameters (Ks, τ) we obtain:
and
By replacing the previous result in (2) we find the appropriate rate of change of Ks and τ as a function of measurable variables:
| (4) |
Note that in (4) we define
which is an adaptation control gain that influences the rate of adaptation.
IV. Experimental Implementation
The previously described control approach was implemented on a paraplegic subject wearing the previously described lower limb exoskeleton. These experiments were conducted using electrical stimulation of the quadriceps muscle, therefore only the knee joint utilized cooperative control, and only when requiring a torque in knee extension (i.e., the quadriceps cannot provide a knee flexion torque). The subject was a T10 ASIA A (i.e., complete) paraplegic male, was 36 years old, 9 years post injury, 1.85 m (6 ft 1 in) tall, and weighed 73 kg (160 lb). All experiments were conducted at the Shepherd Center in Atlanta GA USA, a hospital specializing in spinal cord injury. All experiments required the presence of a physical therapist, as per the experimental protocol approved by the Vanderbilt Institutional Review Board.
A. Electrical stimulation
Electrical stimulation was provided by a custom module that plugs into the main exoskeleton control board. As implemented, the same microcontroller that controls the joint actuator also controls the electrical stimulator. The stimulator provides a biphasic square-wave stimulation waveform. In the experiment described here, the stimulation frequency was set to a constant 50 Hz, and the pulse width set to 200 μs. As previously described, the stimulation amplitude was set by the structure of the adaptive controller. Note that, for safety purposes the stimulation amplitude was saturated at 120 mA. A pair of surface electrodes was placed on each of the right and left quadriceps. The stimulation leads were run proximally, through the waistband of the subject’s pants, where they connected with mating leads from the previously described stimulator.
B. Experimental setup
A series of trajectory-controlled leg lifts were used to assess the efficacy of the cooperative controller to adapt to appropriate gain and phase parameters, and to provide cooperative control under loading conditions. The adaptation gain γr was set to 0.001 N/mA, and the control loop was implemented at a sampling rate of 1 kHz. The PD control gains at the knee joint were set to Kp = 62 Nm/deg and Kd = 1.87 Nms/deg, which are appropriate gains for trajectory tracking. For this assessment, the experiments were implemented on the left leg. During the trials, the subject performed a series of seated leg lifts while wearing a 2.75 kg (6 lb) ankle weight. The knee joint was commanded to move in a sinusoidal trajectory from a flexion angle of 50 deg, to a flexion angle of 15 deg (where 0 deg would be a fully extended knee). The sinusoidal trajectory had a 1 Hz period, with a 5 s pause between each successive leg lift. For comparison purposes during the experiments, the cooperative controller with FES assistance was alternated each cycle with control by the exoskeleton only (i.e., no FES applied).
V. Results
The subject performing the weighted leg lift experiments is shown in Fig. 2, while Fig. 3 and Fig. 4 show corresponding data from the experiments.
Figure 2.
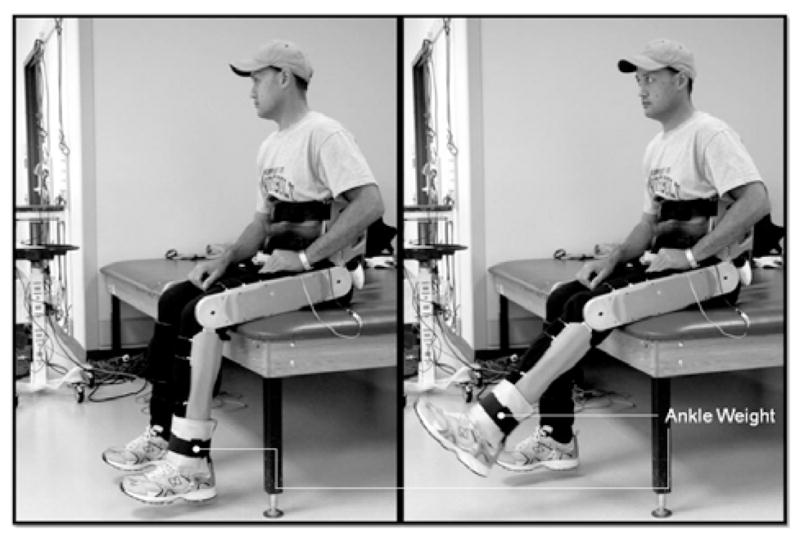
Experimental setup for cooperative control of weighted leg lifts.
Figure 3.

Knee joint tracking (top) and gain and phase parameter adaptation (bottom) during a series of weighted leg lifts with FES.
Figure 4.

Top row: Series of 42 overlaid knee extension trajectories during leg lifts without FES, along with corresponding knee motor torque. Middle row: Series of 42 overlaid knee extension trajectories during leg lifts with FES, along with corresponding knee motor torque. Bottom row: Average trajectory tracking and average motor torque during a series of leg lifts, each bracketed by a standard deviation.
The top row in Fig. 3 shows ten seconds of the knee angle tracking during cooperative control at the beginning (left) and the end (right) of a ten-minute leg lift experiment. The bottom row shows the moving estimate of both the gain and phase characteristics of the muscle model. The convergence in parameter estimates, in addition to the effective tracking and (subsequently described) torque sharing, indicates the efficacy of the adaptation scheme.
Fig. 4 shows the overlaid knee joint trajectories and torques during the series of leg lifts. Specifically, the top row in Fig. 4 shows the overlaid trajectories from 42 leg lifts without FES, along with the exoskeleton motor torque required to achieve these trajectories. The middle row in Fig. 4 shows the overlaid trajectories from 42 leg lifts with FES, along with the exoskeleton motor torque required to achieve these trajectories. Finally, the bottom row in Fig. 4 shows the average of the overlaid trajectories and torques, along with a plus and minus one standard deviation for each case. As indicated in the bottom left plot, the trajectory tracking is essentially the same in both cases, although somewhat better with FES than without. The bottom right plot shows the average torque required by the exoskeleton knee motors for both cases, with and without FES. The average motor torque required without FES was approximately 25 N·m, while the average motor torque required with FES was approximately 13 N·m.
By computing the energy delivered by the knee motor (i.e., by computing power and integrating over the duration of the trajectory), one finds that on average, the knee motor provided 9.9 J of mechanical energy per movement without FES, and 4.4 J of mechanical energy per movement with FES. By implication, the stimulated quadriceps group provided approximately 12 N·m of average torque during the movement, and approximately 5.4 J of mechanical energy per knee extension. Thus, approximately half of the torque was on average provided by the stimulated quadriceps, and approximately 55% of the energy for movement was provided by the metabolic power supply when using the cooperative control approach. A summary of these results is presented in Table 1. The table also shows the energy reduction when using the FES cooperative controller.
Table 1.
Summary Of Results For Cooperative Control Leg Lift Experiments.
| FES | Repetitions | Av Motor Torque | Time of Movement | Mechanical Energy from Motor | Energy Reduction with FES |
|---|---|---|---|---|---|
| With FES | 42 | 13.0 N·m | 0.48 s | 4.4 J | 55.9 % |
| Without FES | 42 | 25.1 N·m | 0.48 s | 9.9 J |
VI. Conclusion
This paper proposes an adaptive cooperative controller that coordinates electrical stimulation of muscle with a powered exoskeleton. The efficacy of the controller was evaluated in an experiment on a T10 complete paraplegic, in which the controller was used at the knee joint of the powered exoskeleton in conjunction with stimulation of the quadriceps muscle group in order to perform weighted leg lifts. The control approach provided consistent tracking control, while 55% of the energy for movement was provided by the metabolic power supply through the contribution of the stimulated quadriceps.
Acknowledgments
Research supported by National Institute of Health (NIH). Grant number 1R01HD059832-01A1.
Contributor Information
Hugo A. Quintero, Email: hugo.a.quintero@vanderbilt.edu.
Ryan J. Farris, Email: ryan.j.farris@vanderbilt.edu.
Kevin Ha, Email: kevin.h.ha@vanderbilt.edu.
Michael Goldfarb, Email: michael.goldfarb@vanderbilt.edu.
References
- 1.Kobetic R, Triolo RJ, Marsolais EB. Muscle selection and walking performance of multichannel FES systems for ambulation in paraplegia. Rehabilitation Engineering, IEEE Transactions on. 1997;5(1):23–29. doi: 10.1109/86.559346. [DOI] [PubMed] [Google Scholar]
- 2.Kralj A, Bajd T, Turk R, Krajnik J, Benko H. Gait restoration in paraplegic patients: a feasibility demonstration using multichannel surface electrode FES. Journal of rehabilitation R&D / Veterans Administration, Department of Medicine and Surgery, Rehabilitation R&D Service. 1983;20(1):3–20. [PubMed] [Google Scholar]
- 3.Kralj AR, Bajd T. Functional electrical stimulation: standing and walking after spinal cord injury. CRC Press; 1989. [Google Scholar]
- 4.Chen SC, Lai CH, Chan WP, Huang MH, Tsai HW, Chen JJJ. Increases in bone mineral density after functional electrical stimulation cycling exercises in spinal cord injured patients. Disability and Rehabilitation. 2005;27(22):1337–1341. doi: 10.1080/09638280500164032. [DOI] [PubMed] [Google Scholar]
- 5.Krause P, Szecsi J, Straube A. Changes in spastic muscle tone increase in patients with spinal cord injury using functional electrical stimulation and passive leg movements. Clinical Rehabilitation. 2008 Jul 1;22(7):627–634. doi: 10.1177/0269215507084648. [DOI] [PubMed] [Google Scholar]
- 6.Bélanger M, Stein RB, Wheeler GD, Gordon T, Leduc B. Electrical stimulation: Can it increase muscle strength and reverse osteopenia in spinal cord injured individuals? Archives of physical medicine and rehabilitation. 2000;81(8):1090–1098. doi: 10.1053/apmr.2000.7170. [DOI] [PubMed] [Google Scholar]
- 7.Hasegawa Y, Jang J, Sankai Y. Series Cooperative walk control of paraplegia patient and assistive system. IEEE Press; 2009. Cooperative walk control of paraplegia patient and assistive system,” in Book Cooperative walk control of paraplegia patient and assistive system; pp. 4481–4486. [Google Scholar]
- 8.Kwa HK, Noorden JH, Missel M, Craig T, Pratt JE, Neuhaus PD. Series Development of the IHMC mobility assist exoskeleton. IEEE Press; 2009. Development of the IHMC mobility assist exoskeleton,” in Book Development of the IHMC mobility assist exoskeleton; pp. 1349–1355. [Google Scholar]
- 9.Neuhaus PD, Noorden JH, Craig TJ, Torres T, Kirschbaum J, Pratt JE. Series Design and Evaluation of Mina: a Robotic Orthosis for Paraplegics. IEEE Press; 2011. Design and Evaluation of Mina: a Robotic Orthosis for Paraplegics,” in Book Design and Evaluation of Mina: a Robotic Orthosis for Paraplegics; pp. 870–877. [DOI] [PubMed] [Google Scholar]
- 10.Suzuki K, Mito G, Kawamoto H, Hasegawa Y, Sankai Y. Intention-based walking support for paraplegia patients with Robot Suit HAL. Advanced Robotics. 2007;21(12):1441–1469. [Google Scholar]
- 11.Tsukahara A, Hasegawa Y, Sankai Y. Series Standing-up motion support for paraplegic patient with Robot Suit HAL. IEEE Press; 2009. Standing-up motion support for paraplegic patient with Robot Suit HAL,” in Book Standing-up motion support for paraplegic patient with Robot Suit HAL; pp. 211–217. [Google Scholar]
- 12.Tsukahara A, Kawanishi R, Hasegawa Y, Sankai Y. Sit-to-Stand and Stand-to-Sit Transfer Support for Complete Paraplegic Patients with Robot Suit HAL. Advanced Robotics. 2010;24(11):1615–1638. [Google Scholar]
- 13.Farris RJ, Quintero HA, Goldfarb M. Preliminary Evaluation of a Powered Lower Limb Orthosis to Aid Walking in Paraplegic Individuals. Neural Systems and Rehabilitation Engineering, IEEE Transactions on. 2011;19(6):652–659. doi: 10.1109/TNSRE.2011.2163083. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 14.Quintero HA, Farris RJ, Goldfarb M. Series Control and implementation of a powered lower limb orthosis to aid walking in paraplegic individuals. 2011. Control and implementation of a powered lower limb orthosis to aid walking in paraplegic individuals,” in Book Control and implementation of a powered lower limb orthosis to aid walking in paraplegic individuals; pp. 1–6. [Google Scholar]
- 15.Quintero HA, Farris RJ, Hartigan C, Clesson I, Goldfarb M. A Powered Lower Limb Orthosis for Providing Legged Mobility in Paraplegic Individuals. Topics in Spinal Cord Injury Rehabilitation. 2011;17(1):25–33. doi: 10.1310/sci1701-25. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 16.Audu ML, To CS, Kobetic R, Triolo RJ. Gait evaluation of a novel hip constraint orthosis with implication for walking in paraplegia. IEEE Transactions on Neural Systems and Rehabilitation Engineering. 2010;18(6):610–618. doi: 10.1109/TNSRE.2010.2047594. [DOI] [PubMed] [Google Scholar]
- 17.Durfee WK, Rivard A. Design and Simulation of a Pneumatic, Stored-energy, Hybrid Orthosis for Gait Restoration. Journal of Biomechanical Engineering. 2005;127(6):1014–1019. doi: 10.1115/1.2050652. [DOI] [PubMed] [Google Scholar]
- 18.Goldfarb M, Korkowski K, Harrold B, Durfee W. Preliminary evaluation of a controlled-brake orthosis for FES-aided gait. IEEE Transactions on Neural Systems and Rehabilitation Engineering. 2003;11(3):241–248. doi: 10.1109/TNSRE.2003.816873. [DOI] [PubMed] [Google Scholar]
- 19.Kobetic R, To CS, Schnellenberger JR, Audu ML, Bulea TC, Gaudio R, Pinault G, Tashman S, Triolo RJ. Development of hybrid orthosis for standing, walking, and stair climbing after spinal cord injury. Journal of Rehabilitation Research & Development. 2009;43(3):447–462. [PubMed] [Google Scholar]
- 20.To CS, Kobetic R, Schnellenberger JR, Audu ML, Triolo RJ. Design of a variable constraint hip mechanism for a hybrid neuroprosthesis to restore gait after spinal cord injury. IEEE/ASME Transactions on Mechatronics. 2008;13(2):197–205. [Google Scholar]