

Abstract
Continuous rhythmic movements are often geared toward particular points in the movement cycle, as evidenced by a local reduction in trajectory variability. These so-called anchor points provide a window into motor control, since changes in the degree of anchoring may reveal how informational and/or neuromuscular properties are exploited in the organization of rhythmic movements. The present experiment examined the relative contributions of informational timing (metronome beeps) and neuromuscular (wrist postures) constraints on anchoring by systematically varying both factors at movement reversal points. To this end, participants cycled their right wrist in a flexed, neutral, or extended posture, either self-paced or synchronized to a metronome pacing peak flexion, peak extension, or both peak flexion and extension. The effects of these manipulations were assessed in terms of kinematics, auditory-motor coordination, and muscle activity. The degree of anchoring seen at the reversal points depended on the degree of compatibility of the prevailing configuration of neuromuscular and informational timing constraints, which had largely independent effects. We further observed systematic changes in muscular activity, which revealed distinct contributions of posture- and muscle-dependent neuromuscular properties to motor control. These findings indicate that the anchor-based discretization of the control of continuous rhythmic wrist movements is determined by both informational timing and neuromuscular constraints in a task-specific manner with subtle interactions between the two, and exemplify how movement variability may be exploited to gain such insights.
Keywords: Motor control, Anchoring, Coordination dynamics, Trajectory variability, Auditory-motor synchronization, Wrist posture, Electromyography
Introduction
Since the seminal work of Bernstein5 it has been duly recognized in the motor control literature that variability is a cardinal feature of biological movement. Even if we repeat the same task over and over again, no movement trajectory is identical to another. An instance of repetition without repetition, as Bernstein described it so aptly.
A critical decision for researchers of human movement is how to deal with this variability in the analysis of movement data, how to account for it theoretically, and how to exploit motor variability as a window into motor control. Various approaches in this regard become readily apparent when taking a bird’s eye view on the motor control literature of the past four decades or so. A case in point is the time-keeper approach in which models of motor timing, consisting of a noisy clock (or clocks) that times (or time) the execution of movement with a noisy motor delay, are derived and tested on the basis of the statistical properties of inter-tap intervals.19,38 The alternative dynamical systems approach focuses not only on the timing of motor events but also on the local and global dynamical properties of the movement trajectories themselves,1,4,14,17,24,35,36 be it on the basis of an explicit model,17 or through application of non-linear time-series analyses to assess task-dependent changes in the flow strength and curvature of the vector fields of the phase portraits of the rhythmic movements in question.36 Interestingly, studies from both approaches have indicated that rhythmic movements are often not controlled continuously over the entire movement cycle but may take a discrete form with the movements being consistently steered to particular points or regions in the movement cycle,3,6,7,14,18,23,27,28,30–33,39 as was in fact already observed a long time ago by Wachholder and Altenburger.37 To anticipate, this “anchoring” phenomenon3,6,7,14,23,30–33 was exploited in the present experimental study to probe and tease apart the contributions of informational timing (i.e., metronome beeps) and neuromuscular (i.e., wrist postures) constraints to motor control.
In his initial study of juggling, Beek3 observed that the cyclical hand movements and ball motions appeared to be organized around certain spatial locations (e.g., the throws and the zeniths) as evidenced by a marked reduction in trajectory variability at these locations compared to other locations. He hypothesized that these locations of reduced variability served as intentional attractors or organizing centers within and for the movement cycle and therefore dubbed them “anchor points.” According to this hypothesis, anchor points may reflect locations in the perceptual-motor workspace where task-specific information is available, for instance about the required timing when rhythmic limb movements are coordinated with an external signal or event. However, later experiments6,9,32 showed that anchor points may also reflect points or regions in the perceptual-motor workspace where functional, task-related neuromuscular properties are exploited, such as the ability to store and release energy.16 Indeed, with the wrist in extreme positions, wrist oscillations involve only activation of shortened agonist muscles, resulting in reduced reversal point variability accompanied by a shorter movement duration in the direction of the anchor point32 and suggesting that the rebound results from passive moments of elongated antagonist muscles.9,12,37
Informational timing and neuromuscular constraints may in fact be operative at the same location. In self-paced rhythmic forearm rotations, for example, peak pronation was characterized by lower variability than peak supination,6 probably due to inherent neuromuscular differences between the contributing muscle groups. Interestingly, acoustically-paced bimanual in- and antiphase rhythmic movements were most stable when peak pronation rather than peak supination was time-locked with the pacing signal,6,9 i.e., when the metronome beeps coincided with the anchor point location identified in unpaced forearm rotations. Thus, informational timing and neuromuscular constraints on anchoring may coincide, which raises the need to determine their potential interplay and relative contributions to anchoring in the execution of continuous rhythmic movements.
Although both acoustic pacing1,6,14,20 and wrist posture32,33 are known to induce anchor points, as evidenced by reduced reversal point variability and shorter movement duration in the direction of this point,32 their combined effects have not been studied to date in a systematic and well-controlled manner. In the current experiment, a pacing signal provided an informational constraint on anchoring at peak flexion and extension in flex-on-the-beat and extend-on-the-beat conditions, respectively (I in Table 1). This informational timing constraint was absent in conditions without pacing and balanced over the two reversal points in double pacing (i.e., flex-and-extend-on-the-beat) conditions (i in Table 1). Likewise, we used flexed or extended wrist postures to impose neuromuscular constraints on anchoring at peak flexion or extension, respectively (M in Table 1), which were balanced over reversal points in the neutral posture (m in Table 1).
Table 1.
Schematic overview of experimental conditions and experimentally induced informational timing (I) and neuromuscular (M) constraints on anchoring at the flexion or extension endpoints
| No pacing | Flex-on-beat | Extend-on-beat | Double pacing | |||||
|---|---|---|---|---|---|---|---|---|
| Flexion | Extension | Flexion | Extension | Flexion | Extension | Flexion | Extension | |
| Flexed | M | M | M | M | ||||
| I | I | i | i | |||||
| Neutral | m | m | m | m | m | m | m | m |
| I | I | i | i | |||||
| Extended | M | M | M | M | ||||
| I | I | i | i | |||||
Lower case letters are used if those constraints were balanced over endpoints
Specific expectations were derived from the general assumption6 and empirical indications32 that informational timing and neuromuscular constraints on anchoring are independent and, hence, have additive effects. Thus, we expected anchoring to occur on peak flexion if M and I coincide here (viz. flex-on-the-beat condition with the wrist flexed), and likewise on peak extension for the extend-on-the-beat condition with the wrist extended. In the double pacing condition with the wrist flexed or extended, we expected anchoring on peak flexion or peak extension, respectively, due to M in combination with the informational timing constraint balanced over endpoints (i). Flex-on-the-beat and extend-on-the-beat with the neutral wrist (I added to balanced m) were expected to induce anchoring on peak flexion and peak extension, respectively. The conditions in which informational timing and neuromuscular anchor points were in conflict (I and M at opposite endpoints) or in balance (neutral posture with no pacing or double pacing) were crucial in determining their relative contribution to the control of continuous rhythmic movements.
Although, to our knowledge, analyses of anchoring have thus far been limited to the level of kinematics, there are clear indications that timing rhythmic wrist movements to a specific point in the movement cycle involves systematic changes in muscle activity.12,37 For this reason, we also assessed the muscular activity associated with anchoring. In particular, we were inspired by Wachholder and Altenburger’s37 demonstration that voluntary emphasis on the flexion or extension phase of rhythmic movements involved shorter movements in the accentuated direction which begun with a discontinuity at or near the non-accentuated reversal point (see also Balasubramaniam et al.1). These kinematic signs of accentuation were accompanied by changes in flexor and extensor muscular activity: a longer period of stronger activity was observed in the accentuated direction, followed by a relatively long pause prior to the onset of muscular activity corresponding to the non-accentuated direction (p. 632 and Fig. 6 on p. 635).37 These early observations suggest that accentuating or emphasizing movements to a particular point in the movement cycle, in line with the notion of anchoring, are brought about by changes in the duration, timing, and amplitude of muscular activity. Hence, we expected that the muscle(s) instantiating movement in the anchored direction would show increased activity and longer burst duration, in combination with modifications in the relative timing between flexor and extensor bursts.
Materials and Methods
Participants
Six males and seven females (aged 19–29 years) volunteered to participate in the study. All were right-handed according to their scores on a shortened version of the Edinburgh handedness inventory26 (mean laterality quotient: 79.0%). Participants gave their written informed consent prior to the experiment, which was approved by the local ethics committee.
Apparatus
Participants were seated in a height-adjustable chair with their right forearm resting on a tabletop with adjustable supports to prevent forearm movement and to secure its neutral position (i.e., centered between pronation and supination extremes). Only flexion and extension movements about the wrist were allowed. The right hand was strapped against a flat, vertically oriented manipulandum mounted on a potentiometer whose axis was aligned with the flexion–extension axis of the wrist. Surface electromyograms (EMG) were obtained from m. flexor carpi radialis (FCR) and m. extensor carpi radialis (ECR). After cleansing and abrasion of the skin, disposable electrodes were positioned in the center of the muscle belly on the line from origin to insertion in a bipolar arrangement with a center-to-center distance of 2 cm. Computer-generated acoustic pacing signals (50 ms beeps, pitch: 440 Hz) were presented through a speaker positioned in front of the participants. Wrist angular position, EMG signals, and acoustic pacing signals were synchronously sampled at 1000 Hz. During stationary wrist posture and practice trials (see below), a feedback display was positioned at a distance of about 2 m at “2 o’clock” in front of the participant providing concurrent visual feedback of wrist angular position. The display consisted of a semicircular bow comprising a continuous array of 448 light-emitting diodes (LEDs) that represented wrist angular positions over a range of 150°. During experimental trials online feedback was visible for the experimenter only, because during those trials the feedback display was rotated towards the experimenter and participants were instructed to direct their gaze at a smiley positioned at eye-height 2 m in front of them (at 12 o’clock). A cover prevented vision of the moving hand.
Procedure
Prior to the experiment proper, participants were instructed to synchronize smooth oscillatory movements about the right wrist with a 3-Hz metronome, with both peak flexion and peak extension coinciding with a beep (i.e., movement frequency: 1.5 Hz). Only participants that were able to stably perform this double pacing condition within three practice trials were included in the experiment (one candidate participant failed to meet this criterion). Next, the EMG electrodes were applied and the remaining 12 participants performed maximum voluntary contractions (MVC) by generating twice a maximal isometric flexion or extension torque about the right wrist for 3 s.
The experiment examined wrist cycling in three wrist postures (i.e., flexed, neutral, and extended) crossed with four acoustic pacing conditions (i.e., no pacing, flex-on-the-beat, extend-on-the-beat, and double pacing). Participants performed all 12 conditions six times, resulting in 72 trials per participant. Trials were presented in blocks with the three wrist postures providing the first level of blocking (3 × 24 trials) and acoustic pacing (4 × 6 trials) the next. The first trial was always a practice trial in which participants received concurrent visual feedback of their wrist angular position and movement amplitude. In the next five trials, the LED feedback display was rotated towards the experimenter and participants were instructed to direct their gaze to the smiley in front of them to prevent potential gaze anchoring effects.31,32 The order of the wrist posture blocks was counterbalanced over the 12 participants. The acoustic pacing blocks within the wrist posture blocks were presented in (semi-)random order with the restriction that the experiment never started with the no pacing condition (see below).
At the start of each wrist posture block, participants were positioned comfortably in the apparatus and the range of wrist motion was determined. Participants adopted their maximal flexion and extension position, each for about 5 s. The center in between these extremes was taken as the neutral position. Subsequently, participants held their wrist at nine different angular positions which were administered in random order (stationary trials: −60°, −45°, −30°, −15°, 0°, 15°, 30°, 45°, and 60°, with 0° corresponding to the individually determined neutral wrist position) to estimate the muscular effort necessary for maintaining these positions against the forces generated by joint stiffness. These experimentally induced stationary wrist orientations all fell well within the individually determined maximal range of motion (155.0 ± 13.5°). Participants had to maintain the LED feedback signal at the designated position (indicated by a marker on the feedback display; tolerance range: ±2.5°) for 10 s, while wrist angular position and EMG were recorded.
Subsequently, one of the three wrist posture blocks was performed. Participants oscillated their wrist with 15° amplitude (range 30°) around −45°, 0°, and 45° in flexed, neutral, and extended blocks, respectively. They were instructed to cycle as smoothly as possible and to synchronize peak flexion (extension) to the beat of the metronome in the flex(extend)-on-the-beat condition. In these single pacing conditions the metronome frequency was 1.5 Hz. In the double pacing condition the metronome was set at 3.0 Hz and flexion and extension excursions were synchronized to consecutive beeps, resulting in a movement frequency of 1.5 Hz as well. In the no pacing condition, participants were instructed to cycle their hand as smoothly as possible at about the same rate as in the paced trials. All trials lasted 30 s (i.e., 45 cycles for pacing trials). To facilitate trial initiation, the experimenter guided the hand to the flexion excursion position in the flex-on-the-beat condition (i.e., −60°, −15°, and 30° for flexed, neutral, and extended wrist posture blocks, respectively) and to the extension excursion position in the extend-on-the-beat condition (i.e., −30°, 15°, and 60°, respectively). In the no pacing and double pacing conditions, the hand was guided to the required center region (i.e., −45°, 0°, or 45°). Trials were repeated if the mean amplitude range deviated more than 10° from the required range, if mean wrist posture during the trial deviated more than 10° from the prescribed mean wrist posture (i.e., −45°, 0°, or 45°), or if mean movement frequency deviated more than 0.01 Hz from the prescribed frequency in the pacing trials (leading to drift in the phase relation between hand excursions and metronome beats) while for the no pacing condition mean movement frequencies lower than 1.4 Hz or higher than 1.6 Hz were penalized. Each wrist posture block lasted approximately 25 min after which a break of at least 5 min was introduced. The experiment lasted 2–2.5 h, including breaks.
Data Analysis MVC and Stationary Trials
FCR and ECR recordings were band-pass filtered (10–400 Hz, second-order bi-directional Butterworth filter) and subsequently whitened using a fifth-order autoregressive filter.34 The highest root mean square (RMS) value in 250 ms windows in the two MVC attempts was defined as the MVC value and used for normalization. For each stationary position trial, the average RMS value (normalized to MVC) over the last 7 s was used as a measure for the muscular effort to maintain that specific position.
Data Analysis of Experimental Trials
Preprocessing and Trial Selection
We had to exclude 11 trials from further analysis due to data collection errors, as well as 16 unpaced trials that did not meet the abovementioned frequency criterion. Potentiometer data (hand movement) of the remaining trials were low-pass filtered using a second-order bi-directional Butterworth filter (cut-off frequency: 15 Hz). The first five cycles of each trial were excluded to eliminate possible transient effects. For the acoustically paced trials, the phase ψ (in °) relative to the metronome was determined for each cycle as ψ
i = 360°·(t
y,i − t
x,i)/(t
x,i+1 − t
x,i), where t
y,i indicates the time of the ith peak flexion (extension) excursion and t
x,i corresponds to the moment of the ith metronome beep that specified peak flexion (extension) excursion.29 Positive values of ψ implied that the hand (y) was lagging the metronome (x). Mean and standard deviation of ψ (i.e.,
Task Performance
Task performance was evaluated in terms of mean movement frequency f, mean amplitude A θ of wrist angular position time series θ, and the deviation from the required mean wrist position Δθ req (viz. difference between the required center of oscillation and the actual center in between the movement reversal points; for negative (positive) Δθ req the wrist was on average more flexed (extended) than required).
Local and Global Kinematics
Spatial variability of wrist flexion and extension reversals was expressed by the respective standard deviations of positional minima and maxima of the potentiometer data (σspatial in °). Apart from these local kinematic characteristics, global properties of the wrist oscillations were assessed using phase portraits (i.e., wrist angular velocity
Auditory-Motor Coordination
For the acoustic pacing trials, auditory-motor coordination was defined in terms of ψ. To compare
EMG
FCR and ECR recordings were band-pass filtered and whitened (see above). To visualize the average muscle activity within a movement cycle, 16 bins were defined in relation to the phase of the hand movement (Θ), defined by tan(Θ) =
In addition, a more fine-grained analysis of the bursting behavior of the muscles was performed. Following the method of Staude and Wolf34 an approximate generalized likelihood test was used to detect local changes in the statistical properties of the EMG (so-called change times) using sliding test windows W of 40 samples and a conservative decision threshold (h = 20). RMS values of the EMG between successive change times were calculated to objectively determine which intervals corresponded to bursts. To this end, we first selected the tentative “OFF” intervals with RMS values lower than the median. Subsequently, bursts (and the corresponding onsets and offsets) were identified as those intervals for which the RMS value of EMG activity exceeded the mean plus twice the standard deviation of the EMG activity in these tentative “OFF” intervals. For quantitative analysis of bursting behavior, we determined the number of bursts, the duration of bursts (% cycle duration), normalized EMG activity during a burst (the “ON” amplitude: AON) and normalized EMG activity in between bursts (the “OFF” amplitude: AOFF). Finally, to analyze the timing of these bursts, the relative phasing of onsets and offsets with respect to the phase of the movement (Θonsets and Θoffsets, respectively) was determined, with 0° indicating that the onsets/offsets coincided with peak flexion (for ECR) or peak extension (for FCR).
Statistical Analysis
To determine the effects of acoustic pacing and wrist posture, dependent variables of task performance, local and global kinematics and auditory-motor coordination were submitted to a repeated measures analysis of variance (ANOVA) with within-subject factors direction (2 levels: flexion, extension; for f, Aθ, Δθ
req, and NL this factor was redundant), posture (3 levels: flexed, neutral, extended) and pacing (4 levels: no pacing, flex-on-the-beat, extend-on-the-beat, double pacing; because
Results
Stationary Wrist Posture Trials
In order to validate the experimental manipulation of wrist posture, we first analyzed the muscular activity in the stationary wrist posture trials. As can be appreciated from Fig. 1, which depicts the average EMG of FCR and ECR for static wrist positions θ, a passive joint torque indeed needed to be counteracted by activity of the antagonistic muscles in order to maintain a specific θ other than neutral (0°). The 2 (muscle) × 9 (wrist positions θ) repeated measures ANOVA revealed a significant muscle × wrist position interaction (F(1.40,15.43) = 19.1, P < 0.001,
Figure 1.
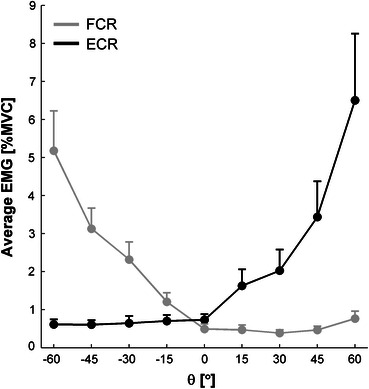
Average EMG for FCR (gray) and ECR (black) muscles as a function of a series of static wrist positions θ. Negative θ values: flexed wrist posture; positive values: extended wrist postures; 0°: individually determined neutral posture. Error bars represent standard error
Experimental Trials
Task Performance
The required amplitude, frequency, and wrist position, indexed by A
θ, f, and Δθ
req, respectively, were adequately performed. A
θ was close to the instructed 15° (14.90°±0.21°) and was not affected by wrist posture or pacing. For f, a wrist posture × pacing condition interaction was observed (F(2.07,22.75) = 5.8, P = 0.009,
Local Kinematics
A significant direction × posture interaction was found for σspatial (F(2,22) = 42.6, P < 0.001,
Figure 2.
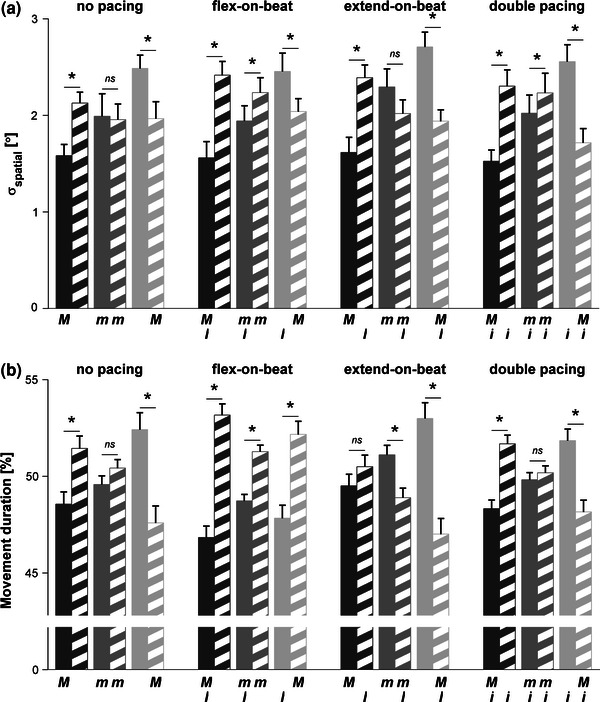
Three-way interaction of (a) spatial reversal point variability (σspatial) and (b) movement duration, presented for all experimental conditions. Flexed, neutral, and extended wrist postures are represented by dark, intermediate, and bright gray bars. Flexion and extension σspatial or movement duration are indicated by solid and hatched bars, respectively. Asterisks indicate significant differences between both sides within a condition (P < 0.05). Error bars represent standard error. Informational timing and neuromuscular mediators are indicated as in Table 1
Global Kinematics
A significant direction × posture interaction (F(2,22) = 15.0, P < 0.001,
The Hooke’s portraits (Fig. 3) of flexion (gray) and extension (black) half cycles showed systematic deviations from
Figure 3.
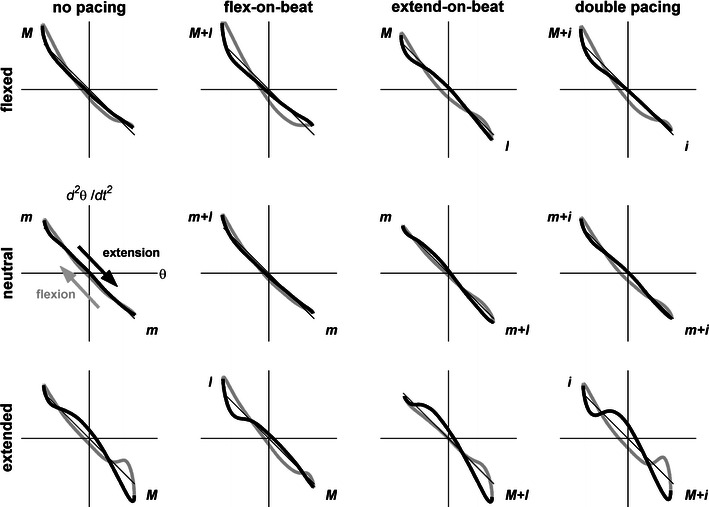
Hooke’s portraits, averaged over participants, as a function of acoustic pacing (columns) and wrist posture (rows) conditions and flexion (gray) and extension (black) half cycles. Informational timing and neuromuscular mediators are indicated as in Table 1
Auditory-Motor Coordination
Hand movements were on average slightly lagging metronome beats (
For
EMG
In the stationary wrist position trials we had observed systematic increments in EMG amplitudes of ECR in extended positions and FCR in flexed positions (Fig. 1), reflecting a notable passive joint torque. This also had profound effects on the EMG patterns during rhythmic wrist cycling. Figure 4 clearly shows the typical reciprocal FCR-ECR activation pattern for wrist cycling in a neutral posture.12,29 However, ECR and FCR were less engaged in flexed and extended postures, respectively, indicating that corresponding extension and flexion torques were generated predominantly passively. The representative phase portraits for these unpaced conditions (upper panels) reflect the aforementioned effects of posture on excursion variability (i.e., systematic variations in the locations of local thinning of the phase portrait), movement duration (i.e., asymmetries in peak velocity), and harmonicity (i.e., greater deviation from the dark circle).
Figure 4.
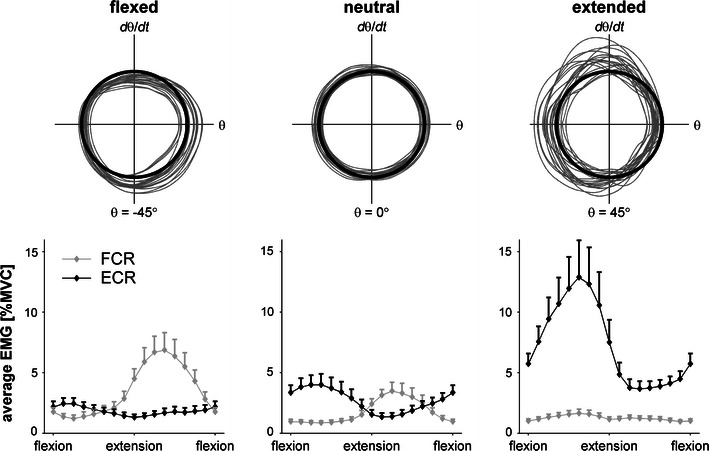
Effects of flexed, neutral, and extended wrist postures on phase portraits and muscle activity. Upper panels: typical phase portraits as obtained for unpaced wrist cycling in the three postures for a single participant. The black circle indicates a harmonic oscillation. Lower panels: for each wrist posture, normalized EMG amplitudes for FCR (gray) and ECR (black) muscles, determined for 16 phases of the movement cycle, were averaged over participants and acoustic pacing conditions; error bars represent the corresponding standard error
The active contribution of each muscle was quantified in terms of the average number of EMG bursts per trial. The significant muscle × posture interaction (F(2,22) = 56.4, P < 0.001,
In addition to the global bursting pattern (Fig. 4) and the number of bursts, also EMG amplitudes (AON and AOFF), the burst duration, and on- and offset timing (Θonsets and Θoffsets) were affected (statistics are summarized in Table 2). Only burst duration and on- and offset timing (Θonsets and Θoffsets) were affected by acoustic pacing as well (Table 2). Finally, the absence of significant three-way interactions in EMG activity implied that the posture-induced effects on EMG measures were generally independent from the acoustic pacing effects, motivating separate treatment of these effects in the next sections.
Table 2.
Statistics of main and interaction effects for EMG measures
|
Significant (P < 0.05) and two near significant effects (P = 0.058) are highlighted in dark and bright gray, respectively
Effects of Wrist Posture on EMG Measures
Mean burst duration demonstrated significant effects of muscle and posture and the muscle × posture interaction. Bursts were shorter for FCR (31.0%) than for ECR (49.4%) and longer for extreme (43.5%) than neutral (36.9%) postures. FCR bursts were longer in extreme (37.1%) than in neutral (24.9%) positions, whereas such an effect was absent for ECR (49.9% vs. 48.9%, respectively).
For both Θonsets and Θoffsets a significant effect of muscle was observed. As could be expected, onsets of FCR (−10.5°, just before peak extension) and ECR (−26.3°, just before peak flexion) were approximately a half-cycle apart, with significantly later onsets for FCR. FCR offsets occurred earlier (111.2°, just after peak flexion velocity) than ECR offsets (157.1°, just before maximal extension). The difference in Θonsets and Θoffsets between muscles accounted for identified differences in burst duration. In addition, for Θoffsets a significant effect of posture was observed, showing later offsets in extreme than in neutral postures (156.6° and 111.8°), probably to overcome increased counteracting passive torque. The significant muscle × posture interaction for Θonsets indicated earlier onsets for ECR in neutral (−44.6°) than in extreme (−8.1°) positions but, in contrast, earlier onsets for FCR in extreme (−19.3°) than in neutral (−1.7°) postures.
The posture effect and muscle × posture interaction for AON indicated that AON was higher in extreme (8.2%) than neutral (5.9%) positions and that this amplitude difference was larger for ECR (9.7% vs. 5.9%) than for FCR (6.6% vs. 5.8%). For AOFF significant muscle, posture, and muscle × posture interaction effects were obtained. AOFF was higher for ECR (2.4%) than for FCR (1.4%) and higher in extreme (2.2%) than neutral postures (1.6%). The interaction indicated that both main effects were due to larger AOFF for ECR in extreme (3.0%) than neutral (1.7%) postures, as no other significant differences were observed (AOFF FCR: 1.4% vs. 1.4%).
Effects of Acoustic Pacing on EMG Measures
For burst duration a significant muscle × pacing interaction was observed, indicating that ECR bursts lasted relatively shorter (44.3%) in the extend-on-the-beat condition than in other pacing conditions (unpaced: 48.5%, flex-on-the-beat: 53.7%, double pacing: 51.1%). In contrast, FCR bursts lasted relatively longer in the extend-on-the-beat condition (34.3%) than in unpaced (29.5%), flex-on-the-beat (29.4%), and double pacing (30.8%) conditions. For Θonsets a near significant muscle × pacing interaction was observed, which might suggest that shorter burst durations in anchored directions were (in part) due to later onsets of corresponding EMG activity (FCR; unpaced: −9.1°, flex-on-the-beat: −7.0°, extend-on-the-beat: −19.0°, double pacing: −7.0°, and ECR; unpaced: −30.4°, flex-on-the-beat: −35.7°, extend-on-the-beat: −14.9°, double pacing: −24.4°). This suggestion was underscored further by the fact that Θoffsets was affected significantly by pacing and the muscle × pacing interaction. FCR offsets occurred earlier in pacing conditions for which a shorter burst duration was observed (unpaced: 100.5°, flex-on-the-beat: 106.9°, double pacing: 110.8°) than for the extend-on-the-beat condition (Θoffsets = 126.6°). Likewise, Θoffsets for ECR occurred somewhat earlier in the extend-on-the-beat condition (152.6°) than in other pacing conditions (unpaced: 156.1°, flex-on-the-beat: 156.5°, double pacing: 163.4°).
Discussion
The present study examined the location and degree of anchoring in continuous rhythmic movements by systematically manipulating informational and neuromuscular constraints on anchoring (see Table 1). Marked anchoring effects were observed when balanced informational timing or neuromuscular anchoring constraints (i or m) were combined with either directional informational timing or directional neuromuscular constraints on anchoring (I or M). Furthermore, conditions with conflicting I and M were instrumental in delineating the relative contribution of the two types of constraints on task execution. In general, temporal and relative phasing aspects of anchoring appeared to depend on informational timing constraints, even for flexed and extended wrist postures. In contrast, the neuromuscular constraints were found to have a particularly strong impact on spatial aspects of anchoring (as indexed by σspatial), regardless of pacing condition. Ambiguous kinematic results for conflicting I and M conditions were resolved by complementary EMG findings, which revealed distinct neuromuscular signatures of anchoring and differences therein between flexor and extensor muscles. Below we discuss the theoretical implications of these findings for understanding how the brain controls rhythmic hand movements. To facilitate the line of reasoning, we first focus on the findings with regard to neuromuscular constraints and then on the informational timing constraints.
Neuromuscular Constraints on Anchoring
As expected, wrist cycling with flexed and extended wrist postures mediated anchoring at peak flexion and peak extension, respectively, as evidenced by reduced variability at the anchored reversal point, shorter movement duration in the anchored direction and decreased overall harmonicity (Figs. 2–4). The suggestion that at these anchor points task-specific neuromuscular properties related to energy storage and release16,32 are exploited, was supported by EMG results showing counteracting passive moments in static (Fig. 1) and dynamic (Fig. 4) situations. Notably, the amount of muscular activity scaled with deviations from neutral static wrist positions, while the phase-dependent reciprocal bursting activity typically seen for rhythmic wrist cycling in a neutral posture12,29,37 disappeared with extreme wrist postures (i.e., ECR was predominantly active in wrist cycling with an extended posture and FCR for oscillations with the wrist flexed).
We also observed marked differences between flexor and extensor muscles in terms of burst duration (FCR bursts lasted shorter), timing (FCR onsets were later, offsets earlier) and amplitude (FCR amplitude was lower), which, in all likelihood, are related to neuromuscular differences between flexors and extensors.2,11,13,15 Increased ECR amplitudes during and in between bursts may have accounted for the reduced harmonicity of wrist oscillations in extended postures (Fig. 3). More interestingly, the observed significant muscle × posture interaction for nearly all EMG measures (Table 2) revealed distinct adaptations of FCR and ECR to changes in wrist posture. Higher amplitudes and longer burst durations were to be expected37 in extreme positions to compensate for increased counteracting passive moments. However, our findings were more subtle in that ECR modulated merely its activity level, whereas FCR modulated its duration and timing. The ability to utilize variations in timing, burst duration, and muscular activity during and in between bursts may be critically important for achieving dexterity, efficiency, and flexibility in motor control. Apparently, flexor muscles are better suited for this purpose than extensor muscles2,15 because the increased activity level observed for extensor muscles reflects a less economical adaptation to changes in wrist posture.
Informational Timing Constraints on Anchoring
Single metronome conditions induced differential anchoring phenomena in expected directions: in the flex-on-the-beat condition, lower flexion than extension σspatial was observed and vice versa for the extend-on-the-beat condition (Fig. 2). In addition, shorter movement durations and smaller deviations in the relative phasing between hand excursions and metronome beats
In general, the effects of the informational timing and neuromuscular constraints on anchoring were largely independent, with the exception of some three-way interactions that revealed subtle task-specific trade-offs between the two types of constraints. These interactions were all associated with flex-on-the-beat with extended wrist and extend-on-the-beat with flexed wrist conditions. In the former condition extension reversal variability was lower, indicating anchoring at peak extension, while flexion movement duration was shorter and flexion
Interestingly, changes in muscle EMG induced by informational timing constraints differed from those induced by neuromuscular constraints: bursts were generally shorter in anchored directions with somewhat delayed onsets and earlier offsets of muscular activity. As Wachholder and Altenburger37 reported similar EMG anchoring characteristics, it is likely that both types of constraints played a role in that study as well. Specifically, the longer pause between offsets of accentuated and onsets of unaccentuated movement phases37 resembled our EMG findings regarding informational timing constraints on anchoring, whereas the longer periods of increased muscular activity37 were congruent with our EMG findings regarding neuromuscular constraints on anchoring (i.e., FCR showed longer bursts while ECR showed increased AON). Finally, for conditions with conflicting I and M the complementary EMG findings were instrumental in delineating the relative contribution of the two types of constraints on task execution, uncovering distinct posture-dependent neuromuscular signatures of anchoring and differences therein between flexor and extensor muscles.
Coda
In the present study we employed motor variability as a window into motor control, to uncover how the central nervous system exploits informational timing (viz. acoustic pacing) and neuromuscular (viz. wrist orientation) properties in the control of rhythmic movements. We found that the anchor-based discretization of the control of continuous rhythmic wrist movements is determined by both types of properties in a task-specific manner with subtle interactions between the two. This implies that the central nervous system organizes the timing of reversal points at metronome beeps, especially if it can take advantage of neuromuscular properties at those points. In so doing, we illustrated exactly how movement variability may serve as a window into motor control. Specifically, the scouting of local thinning of the phase portrait (i.e., reduced reversal point variability) facilitated the identification of the anchor point(s) in the movement cycle, independent of the presence of acoustic pacing stimuli. With acoustic pacing, the reduced relative phase variability between reversals and metronome beeps pointed at anchoring as well, which often but not always coincided with the local thinning of the phase portrait. By complementing these kinematic signs of anchoring with analyses of the underlying EMG activity, we linked the concept of anchoring (typically based on kinematic features) to the realm of neurophysiology (with inferences based on EMG characteristics), thereby providing a complementary entry point for understanding how the brain controls rhythmic hand movements. Collectively, our findings suggest that the number and precise location of anchor points may be (co-)determined by prevailing cost functions related to task performance (more anchor points may be beneficial; viz. lower σψ for double than single metronome conditions14,21) and task economy or computational burden (less anchor points may be more economical31).
Inspired by Bernstein,5 proponents of the dynamical systems approach have asserted that coordinated movement is the outcome of a confluence of organismic, environmental, and task constraints.10,25 However, in order to substantiate such assertions, the constraints in question need to be identified and their convergence needs to be unpacked. The experimental study and analysis of motor variability and anchoring along the lines pursued in the present study may help to achieve this goal, as it serves to identify such constraints in the form of neuromuscular and informational timing mediators of anchoring, and how they are combined in the instantiation of specific forms of coordination, given the prevailing task demands associated with the stability, accuracy, and efficiency of performance.
Acknowledgments
The authors thank Vonne van Polanen for running the experiment. The contribution of Melvyn Roerdink (Veni Grant 451-09-024) and Arne Ridderikhoff (Rubicon Grant 446-07-015) was supported by the Netherlands Organization for Scientific Research (NWO).
Conflict of interest
None.
Open Access
This article is distributed under the terms of the Creative Commons Attribution License which permits any use, distribution, and reproduction in any medium, provided the original author(s) and the source are credited.
References
- 1.Balasubramaniam R, Wing AM, Daffertshofer A. Keeping with the beat: movement trajectories contribute to movement timing. Exp. Brain Res. 2004;159:129–134. doi: 10.1007/s00221-004-2066-z. [DOI] [PubMed] [Google Scholar]
- 2.Bawa P, Chalmers GR, Jones KE, Sogaard K, Walsh ML. Control of the wrist joint in humans. Eur. J. Appl. Physiol. 2000;83:116–127. doi: 10.1007/s004210000270. [DOI] [PubMed] [Google Scholar]
- 3.Beek PJ. Juggling Dynamics. Amsterdam: Free University Press; 1989. p. 222. [Google Scholar]
- 4.Beek PJ, Beek WJ. Tools for constructing dynamical models of rhythmic movement. Hum. Mov. Sci. 1988;7:301–342. doi: 10.1016/0167-9457(88)90015-2. [DOI] [Google Scholar]
- 5.Bernstein NA. The Coordination and Regulation of Movements. Oxford: Pergamon Press; 1967. p. 196. [Google Scholar]
- 6.Byblow WD, Carson RG, Goodman D. Expressions of asymmetries and anchoring in bimanual coordination. Hum. Mov. Sci. 1994;13:3–28. doi: 10.1016/0167-9457(94)90027-2. [DOI] [Google Scholar]
- 7.Carson RG, Byblow WD, Goodman D. The dynamical substructure of bimanual coordination. In: Swinnen SP, Heuer H, Massion J, Casaer P, editors. Interlimb Coordination: Neural, Dynamical and Cognitive Constraints. Orlando, FL: Academic Press; 1994. pp. 319–337. [Google Scholar]
- 8.Carson RG, Chua R, Byblow WD, Poon P, Smethurst CJ. Changes in posture alter the attentional demands of voluntary movement. Proc. R. Soc. Lond. B. 1999;266:853–857. doi: 10.1098/rspb.1999.0715. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 9.Carson RG, Riek S, Smethurst CJ, Lisón Párraga JF, Byblow WD. Neuromuscular-skeletal constraints upon the dynamics of unimanual and bimanual coordination. Exp. Brain Res. 2000;131:196–214. doi: 10.1007/s002219900272. [DOI] [PubMed] [Google Scholar]
- 10.Davids K, Button S, Bennett S. Dynamics of Skill Acquisition. A Constraints-Led Approach. Champaign, IL: Human Kinetics; 2008. p. 264. [Google Scholar]
- 11.Delp SL, Grierson AE, Buchanan TS. Maximum isometric moments generated by the wrist muscles in flexion-extension and radial-ulnar deviation. J. Biomech. 1996;29:1371–1375. doi: 10.1016/0021-9290(96)00029-2. [DOI] [PubMed] [Google Scholar]
- 12.Esposti R, Cavallari P, Baldissera F. Partition of voluntary command to antagonist muscles during cyclic flexion-extension of the hand. Exp. Brain Res. 2005;162:436–448. doi: 10.1007/s00221-004-2120-x. [DOI] [PubMed] [Google Scholar]
- 13.Ettema GJC, Styles G, Kippers V. The moment arms of 23 muscle segments of the upper limb with varying elbow and forearm positions: implications for motor control. Hum. Mov. Sci. 1998;17:201–220. doi: 10.1016/S0167-9457(97)00030-4. [DOI] [Google Scholar]
- 14.Fink PW, Foo P, Jirsa VK, Kelso JA. Local and global stabilization of coordination by sensory information. Exp. Brain Res. 2000;134:9–20. doi: 10.1007/s002210000439. [DOI] [PubMed] [Google Scholar]
- 15.Gonzalez RV, Buchanan TS, Delp SL. How muscle architecture and moment arms affect wrist flexion-extension moments. J. Biomech. 1997;30:705–712. doi: 10.1016/S0021-9290(97)00015-8. [DOI] [PubMed] [Google Scholar]
- 16.Guiard Y. On Fitts’s and Hooke’s laws: simple harmonic movement in upper-limb cyclical aiming. Acta Psychol. 1993;82:139–159. doi: 10.1016/0001-6918(93)90009-G. [DOI] [PubMed] [Google Scholar]
- 17.Haken H, Kelso JAS, Bunz H. A theoretical model of phase transitions in human hand movements. Biol. Cybern. 1985;51:347–356. doi: 10.1007/BF00336922. [DOI] [PubMed] [Google Scholar]
- 18.Ivry R, Spencer RM, Zelaznik HN, Diedrichsen J. The cerebellum and event timing. In: Highstein SM, Thach WT, editors. The Cerebellum: Recent Developments in Cerebellar Research. New York: NY Academy of Sciences; 2002. pp. 302–317. [DOI] [PubMed] [Google Scholar]
- 19.Jagacinski R, Marshburn E, Klapp ST, Jones MR. Test of streamed vs. integrated structure in polyrhythmic tapping. J. Mot. Behav. 1988;20:416–442. doi: 10.1080/00222895.1988.10735455. [DOI] [PubMed] [Google Scholar]
- 20.Kelso JAS, DelColle JD, Schöner G. Action-perception as a pattern formation process. In: Jeannerod M, editor. Attention and Performance XIII: Motor Representation and Control. Hillsdale, NJ: Erlbaum; 1990. pp. 139–169. [Google Scholar]
- 21.Kudo K, Park H, Kay BA, Turvey MT. Environmental coupling modulates the attractors of rhythmic coordination. J. Exp. Psychol. Hum. Percept. Perform. 2006;32:599–609. doi: 10.1037/0096-1523.32.3.599. [DOI] [PubMed] [Google Scholar]
- 22.Mardia KV. Statistics in Directional Data. London, UK: Academic Press; 1972. [Google Scholar]
- 23.Maslovat D, Chua R, Lee TD, Franks IM. Anchoring strategies for learning a bimanual coordination pattern. J. Mot. Behav. 2006;38:101–117. doi: 10.3200/JMBR.38.2.101-117. [DOI] [PubMed] [Google Scholar]
- 24.Mottet D, Bootsma RJ. The dynamics of goal-directed rhythmical aiming. Biol. Cybern. 1999;80:235–245. doi: 10.1007/s004220050521. [DOI] [PubMed] [Google Scholar]
- 25.Newell KM. Constraints on the development of coordination. In: Wade MG, Whiting HTA, editors. Motor Development in Children: Aspects of Coordination and Control. Dordrecht: Martinus Nijhoff; 1986. pp. 341–360. [Google Scholar]
- 26.Oldfield RC. The assessment and analysis of handedness: the Edinburgh inventory. Neuropsychologia. 1971;9:97–113. doi: 10.1016/0028-3932(71)90067-4. [DOI] [PubMed] [Google Scholar]
- 27.Pressing J. The referential dynamics of cognition and action. Psychol. Rev. 1999;106:714–747. doi: 10.1037/0033-295X.106.4.714. [DOI] [Google Scholar]
- 28.Repp BH. Sensorimotor synchronization: a review of tapping literature. Psychon. Bull. Rev. 2005;12:969–992. doi: 10.3758/BF03206433. [DOI] [PubMed] [Google Scholar]
- 29.Ridderikhoff A, Peper CE, Beek PJ. Unraveling interlimb interactions underlying bimanual coordination. J. Neurophysiol. 2005;94:3112–3125. doi: 10.1152/jn.01077.2004. [DOI] [PubMed] [Google Scholar]
- 30.Roerdink M. Anchoring: moving from theory to therapy. Amsterdam: M. Roerdink; 2008. [Google Scholar]
- 31.Roerdink, M., P. J. M. Bank, C. E. Peper, and P. J. Beek. Anchoring in rhythmic in-phase and antiphase visuomotor tracking. Mot. Control (in press). [DOI] [PubMed]
- 32.Roerdink M, Ophoff ED, Peper CE, Beek PJ. Visual and musculoskeletal underpinnings of anchoring in rhythmic visuo-motor tracking. Exp. Brain Res. 2008;184:143–156. doi: 10.1007/s00221-007-1085-y. [DOI] [PMC free article] [PubMed] [Google Scholar]
- 33.Roerdink M, Peper CE, Beek PJ. Effects of correct and transformed visual feedback on rhythmic visuo-motor tracking: tracking performance and visual search behavior. Hum. Mov. Sci. 2005;24:379–402. doi: 10.1016/j.humov.2005.06.007. [DOI] [PubMed] [Google Scholar]
- 34.Staude G, Wolf W. Objective motor response onset detection in surface myoelectric signals. Med. Eng. Phys. 1999;21:449–467. doi: 10.1016/S1350-4533(99)00067-3. [DOI] [PubMed] [Google Scholar]
- 35.Torre K, Balasubramaniam R, Delignières D. Oscillating in synchrony with a metronome: serial dependence, limit cycle dynamics, and modeling. Mot. Control. 2010;14:323–343. doi: 10.1123/mcj.14.3.323. [DOI] [PubMed] [Google Scholar]
- 36.Van Mourik AM, Daffertshofer A, Beek PJ. Extracting global and local dynamics from the stochastics of rhythmic forearm movements. J. Mot. Behav. 2008;40:214–231. doi: 10.3200/JMBR.40.3.214-231. [DOI] [PubMed] [Google Scholar]
- 37.Wachholder K, Altenburger H. Beiträge zur Physiologie der willkürlichen Bewegung IX: Fortlaufende Hin- und Herbewegungen. Pflüger’s Arch. 1926;214:625–641. doi: 10.1007/BF01741941. [DOI] [Google Scholar]
- 38.Wing MW, Kristofferson AB. Response delays and the timing of discrete motor responses. Percept. Psychophys. 1973;14:5–12. doi: 10.3758/BF03198607. [DOI] [Google Scholar]
- 39.Zelaznik HN, Spencer RM, Ivry RB, Baria A, Bloom M, Dolansky L, Justice S, Patterson K, Whetter E. Timing variability in circle drawing and tapping: probing the relationship between event and emergent timing. J. Mot. Behav. 2005;37:395–403. doi: 10.3200/JMBR.37.5.395-403. [DOI] [PMC free article] [PubMed] [Google Scholar]