

Abstract
The aim of the present study was to analyze the hydrodynamic characteristics of a true model of a swimmer hand with the thumb in different positions using numerical simulation techniques. A three-dimensional domain was created to simulate the fluid flow around three models of a swimmer hand, with the thumb in different positions: thumb fully abducted, partially abducted, and adducted. These three hand models were obtained through computerized tomography scans of an Olympic swimmer hand. Steady-state computational fluid dynamics analyses were performed using the Fluent® code. The forces estimated in each of the three hand models were decomposed into drag and lift coefficients. Angles of attack of hand models of 0°, 45° and 90°, with a sweep back angle of 0° were used for the calculations. The results showed that the position with the thumb adducted presented slightly higher values of drag coefficient compared with thumb abducted positions. Moreover, the position with the thumb fully abducted allowed increasing the lift coefficient of the hand at angles of attack of 0° and 45°. These results suggested that, for hand models in which the lift force can play an important role, the abduction of the thumb may be better, whereas at higher angles of attack, in which the drag force is dominant, the adduction of the thumb may be preferable.
Key points.
Numerical simulation techniques can provide answers to problems which have been unobtainable using experimental methods.
The computer tomography scans allowed the creation of a complete and true digital anatomic model of a swimmer hand.
The position with the thumb adducted presented slightly higher values of drag coefficient than the positions with the thumb abducted.
The position with the thumb fully abducted allowed increasing the lift coefficient of the hand at angles of attack of 0 and 45 degrees.
For hand positions in which the lift force can play an important role the abduction of the thumb may be better whereas at higher angles of attack, in which the drag force is dominant, the adduction of the thumb may be preferable for swimmers.
Key words: Computational fluid dynamics, reverse engineering, hand, finger, drag, lift.
Introduction
The numerical simulation technique is currently one of the best established numerical tools in the field of biomechanical engineering. This methodology has been used in the computational analysis of the fluid flow in several research fields, such as medicine, biology, industry and sports (e.g. Boulding et al., 2002; Dabnichki and Avital, 2006; Guerra et al., 2007; Marshall et al., 2004). This numerical tool is a branch of fluid mechanics that solves and analyses problems involving a fluid flow by means of computer-based simulations. Thus, one of the major benefits is to quickly answer many ’what if?’ questions. It is possible to test many variations to seek for an optimal result, without human experimental testing. The user is able to computationally model any flow field, provided the geometry of the object is known and some initial flow conditions are prescribed. This can provide answers and insights into problems which have been unavailable or obtainable with very expensive costs (using physical or experimental testing techniques). As such, numerical simulation techniques can be seen as bridging the gap between theoretical and experimental fluid dynamics.
In sports scope, the main results suggested that the numerical analysis could provide useful information about performance. Indeed, the use of numerical simulation techniques has produced significant improvements in equipment design and technique prescription in areas such as sailing performance (Pallis et al., 2000), Formula 1 racing (Kellar et al., 1999) and winter sports (Dabnichki and Avital, 2006). In swimming, this methodology has been used to study the propulsive forces produced by the hand and forearm in swimming (Bixler and Schloder, 1996; Gardano and Dabnichki, 2006; Lecrivain et al., 2008; Marinho et al., 2009a; Rouboa et al., 2006; Silva et al., 2005) and the magnitude of drag forces resisting forward motion (Marinho et al., 2008a; Silva et al., 2008; Zaidi et al., 2008). However, a common weakness still remains: practically all the models that have been developed are based on approximate analytical representations of the human structures and their geometrical accuracy has never been discussed. This approach has been commonly adopted, for example, to reduce the computational cost of memory requirements (Aritan et al., 1997). One of the main reasons for such limitations is the difficulty to design a true digital model of the human limbs. In most cases, the authors used two-dimensional models (Bixler and Schloder, 1996; Rouboa et al., 2006; Silva et al., 2005; 2008; Zaidi et al., 2008). When three-dimensional models were used, these were very simple and reductive representations of the human limbs (Gardano and Dabnichki, 2006). Gardano and Dabnickki (2006) used standard geometrical solids to represent the upper limb, which leaded to significant differences between the human limb and the digital model. These differences between true and computed models could lead to less accurate numerical results (Candalai and Reddy, 1992). In fact, Candalai and Reddy, 1992 conducted a simulation of the effect of the ischial tuberosity’s geometry on the shear and compressive stress in buttock issue and showed that the influence of the geometry on the stress magnitude could be significant. A possible variation of more than 60% in the shear stress was found. Despite the differences between the aims of the work of Candalai and Reddy, 1992 and swimming studies, one should be aware of the ecological validity of the data that is obtained, stressing the relevance of the scanned models instead of analytical representations. Moreover, it should be noted that mesh generation, the first step of numerical simulations, is a tough procedure, especially when solving three-dimensional problems. Thus, it should be based on directly obtained anatomical data (Aritan et al., 1997; Lecrivain et al., 2008; Marinho et al., 2008b; Marinho et al., 2009b).
Magnetic resonance imaging, computer tomography scans and laser scans seem to be a good approach to design true human models (Aritan et al., 1997; Lecrivain et al., 2008; Marinho et al., 2008b; Marshall et al., 2004). The overall aim of this approach, also called reverse engineering process, is to build a virtual model geometrically identical to an existing object. Scanning and data manipulation are the two main parts in this process. Briefly one needs to gather the requisite data from a three-dimensional object and then to edit the data and translate it into more suitable formats such as surface models (Lecrivain et al., 2008).
Using a true model of the human body it is possible to improve the quality of the numerical simulations techniques and to provide insights into some questions that remain unclear in swimming technique. The thumb’s relative position during the underwater path of the stroke cycle is one of these questions. An inter-subject variety of thumb position can be observed among elite swimmers. Some swimmers maintain the thumb adducted, others maintain the thumb abducted and others maintain the thumb partially abducted. In fact, there remains much to be learned on the effect of thumb position and whereas similar results are obtained by different methods of testing (Takagi et al., 2001). Schleihauf, 1979 showed that a thumb partially abducted allows higher propulsion. Berger et al., 1997 found that models with different thumb abduction/adduction had very little effect on drag forces but an effect on lift forces. Takagi et al., 2001 reported that adduction and abduction of the thumb influenced the lift force. The thumb abducted seemed to be advantageous for generating lift force when the thumb is the leading edge and the thumb adducted seemed to be advantageous when the little finger leads the motion (Takagi et al., 2001). To our knowledge, there is no research published using a numerical approach on the repercussion of thumb abduction/adduction and with anthropometrical data of elite swimmers’ hand.
Therefore, the aim of the present study was to analyze the hydrodynamic characteristics of a true model of a swimmer hand with the thumb in different positions using numerical simulation techniques.
Methods
Three-dimensional model
Scanning
Cross-sectional scans of the right hand were obtained using a Toshiba® Aquilion 4 computer tomography scanner, using a configuration of V2.04 ER001. The subject was an Olympic level male swimmer, who participated in the 2004 Olympic Games in Athens. The subject was lying with his right arm extended upwards and fully pronated and with the thumb in three positions: fully abducted, partially abducted and adducted (Figure 1). In the position with the thumb fully abducted the angle between the forefinger and the thumb was 68° and in the position with the thumb partially abducted the angle between these two fingers was 30°. The hand length, the palm length and the hand breadth of the swimmer were 20.20 cm, 9.50 cm and 8.90 cm, respectively. This protocol has been approved by the appropriate ethical committee of the institution in which it was performed and the subject gave informed consent to participate in this work.
Figure 1.

The models of the hand with the thumb in different positions: fully abducted, partially abducted and adducted.
Data manipulation
The transformation of the values from the computer tomography scans into nodal coordinates in an appropriate coordinate system demands the use of image processing techniques. The image processing program used in this study was the Anatomics Pro®, which allowed obtaining the boundaries of the human segments, creating a three-dimensional reconstruction of the swimmer hand.
At first, before processing and converting procedures the data was prepared, namely by observing the computer tomography data and erasing the non-relevant parts of the anatomical model. This step was also conducted using the software FreeForm Sensable®. Finally, the data was converted into an IGES format (*.igs), that could be read by Gambit/Fluent® to define the finite elements approach through the three-dimensional surfaces (Figure 2).
Figure 2.
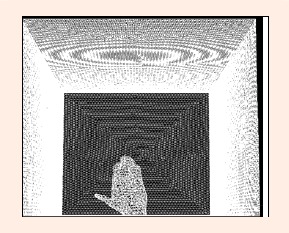
The model of the hand with the thumb fully abducted inside the domain (Angle of attack = 0°, Sweepback angle = 0°).
Computational fluid dynamics
Most computational fluid dynamics procedures are divided into three successive stages: pre-processing, simulation and post-processing. The pre-processing stage involves creating a computational domain where the flow simulation occurs, bounding it with external conditions and discretising it into an adequate mesh grid. The solution of the flow problem is defined at nodes inside each cell. The accuracy of a solution and its cost in terms of necessary computer memory and calculation time are dependent on the quality of the grid. Optimal meshes are often non-uniform: finer in areas of high pressure and velocity gradients and coarser in areas with relatively little change. The simulation is performed through an iterative algorithm until convergence. The variables of interest (for instance, the hydrodynamic forces) are then extracted from the computed flow field (Lecrivain et al., 2008). For more mathematical details please observe the appendix section.
Pre-processing
The whole domain was meshed with 200.000 cells. The grid was a hybrid mesh composed of prisms and pyramids. Adaptive meshing was used to achieve optimum mesh refinement. Thus, significant efforts were conducted to ensure that the model would provide accurate results by decreasing the grid node separation in areas of high pressure and velocity gradients.
Solving steady flow
The numerical simulations of a three-dimensional model of a swimmer hand were analyzed under steady flow conditions using the Fluent® code. The hydrodynamic fluid forces produced by the hand, lift (L) and drag (D), were computed in this study. These forces are functions of the fluid velocity, being determined by the application of the equations 1 and 2.
In equations 1 and 2, V is the water velocity, CD and CL are the drag and lift coefficients, respectively, ρ is the fluid density and A is the projection area of the model for different angles of attack used in this study. Drag force is defined as the force acting parallel to the flow direction and lift force lies perpendicular to the drag force.
The angle between the hand and the flow direction is defined as the angle of attack (Figure 3) and the leading edge of the hand relative to the flow is the sweep back angle (Figure 4). Angles of attack of hand models of 0°, 45° and 90°, with a sweep back angle of 0° (thumb as the leading edge) were used for the calculations (Schleihauf, 1979). The measured forces on the hand models were decomposed into drag (CD) and lift (CL) coefficients, using equations 1 and 2 and the resultant drag coefficient was calculated by the sum of CD and CL, using the Pythagoras theorem.
Figure 3.
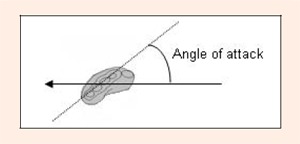
The angle of attack (Schleihauf, 1979). The arrow represents the direction of the flow.
Figure 4.
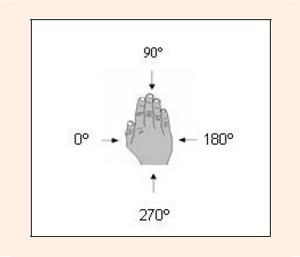
The sweep back angle (Schleihauf, 1979). The arrows represent the direction of the flow.
On the left side of the domain access (Figure 2), the x component of the velocity was chosen to be within the range of typical hand velocities during front crawl swimming underwater path: from 0.50 m·s-1 to 4.00 m·s-1, with 0.50 m·s-1 increments (Lauder et al., 2001; Rouboa et al., 2006). The y and z components of the velocity were assumed to be equal to zero. On the right side, the pressure was equal to 1 atm, a fundamental pre requisite to prevent the reflection of the flow. Around the model, the three components of the velocity were considered equal to zero to allow the adhesion of the fluid to the model. It was also considered the action of the gravity force (g = 9.81 m·s-2), as well as the turbulence percentage of 1% with 0.10 m of length (Bixler and Riewald, 2002; Marinho et al., 2008a). The considered fluid was water, incompressible with density (ρ = 996.6 x 10-9 kg·mm-3) and viscosity (μ = 8.571 x 10-7 kg/mm/s).
The incompressible Reynolds averaged Navier-Stokes equations with the standard k-epsilon (k-ε) model was considered and implemented in the commercial code Fluent®, as shown before (Moreira et al., 2006).
Results
In Figures 5, 6 and 7 the evolution of the values of CD and CL according to flow velocity and angle of attack for each thumb position are presented. For the three thumb positions, CD and CL remained almost constant throughout the flow velocities tested (0.50-4.0 m·s-1). However, it was possible to note a slightly decrease in the force coefficients, especially from 0.50 to 1.50 m·s-1.
Figure 5.
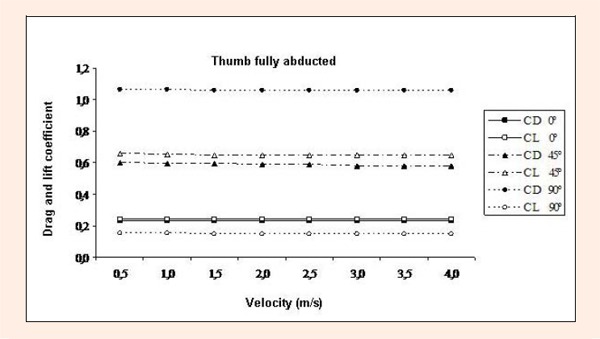
Drag and lift coefficients vs. flow velocity for each angle of attack in the position with the thumb fully abducted.
In Figures 8 and 9 the values of CD and CL obtained for the different angles of attack and for the different thumb positions are presented for a flow velocity of 2.0 m·s-1.
Figure 8.
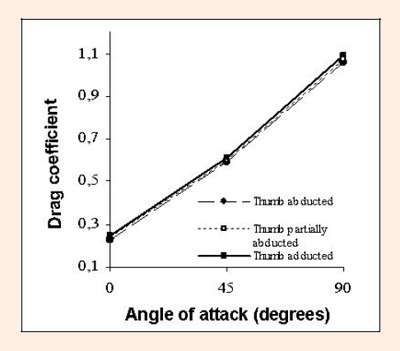
Values of drag coefficient obtained for the different angles of attack and for the different thumb positions. Sweepback angle = 0° and flow velocity = 2.0 m·s-1.
It is possible to notice that the values of the CD increased with the angle of attack. Indeed, the maximum value of CD was produced at an angle of attack of 90°, presenting a value of about 1.0 in the three models. Moreover, the values of CD were almost similar in the three different thumb positions, although the position with the thumb adducted presented slightly higher values at 0°, 45° and 90°.
The CL presented the maximum values at an angle of attack of 45° (CL ≈ 0.6). The values of CL at angles of attack of 0° and 90° seemed to be identical (CL ≈ 0.15). Further, the position with the thumb fully abducted and with the thumb partially abducted presented higher values of CL when compared with the thumb adducted position at angles of attack of 0° and 45°. Nevertheless, the position with the thumb fully abducted presented higher values when compared with the thumb partially abducted position at 0° and 45°. At an angle of attack of 90° the values of CL were identical irrespective of the thumb position.
When analyzing the resultant force coefficient (Figure 10), one can note that the position with the thumb abducted presented higher values than the positions with the thumb partially abducted and adducted at angles of attack of 0° and 45°. However, at an angle of attack of 90° the position with the thumb adducted presented the highest value of resultant force coefficient.
Figure 10.
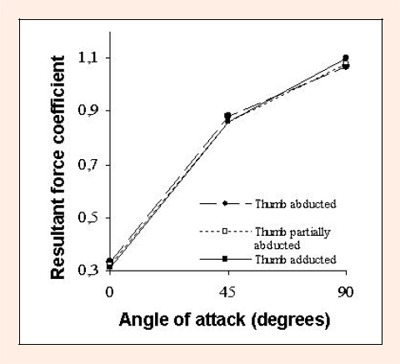
Values of the resultant force coefficient obtained for the different angles of attack and for the different thumb positions. Sweepback angle = 0° and flow velocity = 2.0 m·s-1.
Discussion
The aim of the present study was to analyze the hydrodynamic characteristics of a true model of a swimmer hand with the thumb in different positions using numerical simulation techniques.
In this research we tried to improve the previous studies that applied the numerical techniques to the analysis of swimming propulsion, using a more realistic model of the swimmer hand. Indeed, the computer tomography scans allowed the creation of a complete and true digital anatomic model of a swimmer hand (Aritan et al., 1997).
One of the major benefits of the numerical simulation procedures is that it allows the user to modify the inputs into the model to determine how its changes affect the resultant flow conditions. Regarding swimming, changes in technique can be examined using the model, rather than the “trial and error” approach that typically is used. In this work we have analysed the hydrodynamic forces produced by the swimmer hand with the thumb in different positions as used by high level swimmers.
For the three thumb positions, the CD and CL remained almost constant throughout the flow velocities that were tested. A similar observation was already reported in other numerical studies (Alves et al., 2007; Bixler and Riewald, 2002; Rouboa et al., 2006; Silva et al., 2005). However, in the present study, a slightly decrease in the CD and CL were noted, especially from 0.50 to 1.50 m·s-1. Berger et al., 1995 and Bixler and Riewald, 2002 observed a similar tendency for lower velocities, in a towing tank experiment and using numerical techniques, respectively. For lower velocities, a very small decrease in the force coefficients values occurred with the velocity increase. However, from a practical standpoint, the coefficients were considered constant since the forces at these velocities are relatively small (Bixler and Riewald, 2002).
The values of CD produced by the swimmer hand were very similar concerning the three thumb positions. However, the position with the thumb adducted presented slightly higher values at the angles of attack tested in this study. Moreover, the values of CL changed with the thumb position at angles of attack of 0° and 45°, although at an angle of attack of 90° the values of the different thumb positions were identical. At 0° and 45°, the position with the thumb fully abducted presented the highest values of CL.
Schleihauf, 1979 studied the changes in the values of CL as a function of the thumb position (thumb 100% abducted, 75% abducted and 50% abducted). However the authors did not study the CD nor the position with the thumb adducted. In the study of Schleihauf, 1979, the position with the thumb fully abducted showed a maximum CL at an acute angle of attack of 15°, whereas the models with partial thumb abduction showed a maximum value of CL at higher angles of attack (45°-60°). In these angles of attack the position with the thumb partially abducted presented higher values when compared with the thumb fully abducted. Berger et al., 1997 reported that the thumb position determined lift forces, although the drag forces were not influenced by thumb abduction/adduction. Moreover, Takagi et al., 2001 estimated the drag and lift forces from direct measurement of pressure differences between the front and back of the hand in a resin model with the thumb abducted and adducted. The experimental results revealed that the thumb position influenced the fluid force over the entire hand, especially in the lift force. For a sweep back angle of 0° (as used in the present study), the model with abducted thumb seemed to be advantageous for generating lift force, whereas for a sweep back angle of 180° (the little finger as the leading edge), the adducted thumb seemed preferable. However, in the study of Takagi et al., 2001, the CD presented similar values in the two thumb position for a sweep back angle of 0°. For a sweep back angle of 180°, the position with the thumb adducted presented higher values.
Although some differences in the results of different studies, it seems that when the thumb leads the motion (sweep back angle of 0°) a hand position with the thumb abducted into the plane of the hand would be preferable to an adducted thumb position. In this case, it is possible to suggest that during the insweep phase of the underwater path in butterfly, breaststroke and front crawl techniques and in the upsweep phase of backstroke technique the position with the thumb abducted could be gainful for swimmers. On the other hand, based only on the study of Takagi et al., 2001, when the little finger leads the motion (sweep back angle of 180°), during the outsweep phase of butterfly and breaststroke, and some parts of the downsweep phase in backstroke and upsweep in front crawl, the position with the thumb adducted seemed preferable. A possible explanation may be related to the change in the flow around the hand due to the thumb position: the lift force is enhanced by a pressure increase on the palm and a pressure decrease on the back of the hand (Colwin, 1992; Takagi et al., 2001).
In the present study only the sweep back angle of 0° was analyzed. Thus these technical implications must be taken with serious concerns. In fact, further studies are warranted to analyze the thumb position with different sweep back angles and for a higher range of angles of attack. In addition, one should be careful to generalize these results since each swimmer has a different hand shape and the main findings could vary between different subjects. However, it seems that the thumb position may play an important role in optimizing swimming technique. When analyzing the resultant force coefficient, we found that the position with the thumb abducted presented higher values than the positions with the thumb partially abducted and adducted at angles of attack of 0° and 45°. At an angle of attack of 90° the position with the thumb adducted presented the highest value of resultant force coefficient. These data seem to corroborate previous findings abovementioned. For hand positions in which the lift force can play an important role (Figures 5, 6 and 7) the abduction of the thumb may be benefic for swimmers. In addition, at higher angles of attack, in which the drag force is dominant, the adduction of the thumb may be preferable. The resultant force coefficient data showed that the largest values were produced when the angle of attack was 90°. Sanders, 1997 found that the largest resultant forces were produced when the hand had around 90° of attack regardless of sweep back angle. These results are interesting in light of observations that swimmers use sculling motions rather than pulling the hand directly opposite the desired direction of motion with angles of attack near 90° to improve the movement efficiency (Sanders, 1999). On the other hand, it remains the question whereas this resultant force can be used to propel into the desired direction. Thus, in the future it seems important to analyze the effective propulsive force produced by the swimmer hand during the underwater path.
In all the thumb positions the CD obtained the highest value at an angle of attack of 90°, i.e., where the hand plane was directly perpendicular to the direction of the flow. The same result was reported by others using experimental (Berger et al., 1995; Sanders, 1999) and numerical approaches (Alves et al., 2007; Rouboa et al., 2006), indicating the contribution of the hand surface area to the CD increase.
The CL seemed to have a residual influence in the generation of propulsive force by the hand for angles of attack of 0° and 90°, but it is important at an angle of attack of 45°. These findings are similar to those found in experimental (Berger et al., 1995; Sanders, 1999; Schleihauf, 1979; Wood, 1977) and numerical studies (Alves et al., 2007; Bixler and Riewald, 2002), reporting the important role of lift force to the overall propulsive force production by the hand in underwater phases of swimming strokes when the angle of attack nears 45° (e.g. insweep phase). In fact, although the CD and CL were very similar in the three thumb positions at angles of attack of 0° and 45°, it was possible to observe that for the positions with the thumb fully abducted and partially abducted the CL presented higher values than CD at an angle of attack of 45°. Thus, it seems essential to reinforce the need to analyze a larger range of angles of attack and sweep back angles, trying to clarify the true importance of the lift force to the propulsive force production. Lift force plays an important role at other angles of attack rather than the 45°, as reported by Schleihauf, 1979 at an angle of attack of 15° and by Sanders, 1999 at sweep back angles rather than 0°.
In the present study, despite the fact that only the drag and lift coefficients under steady flow conditions were modelled, we do consider that the numerical approach that was conducted is highly satisfactory. Firstly, the use of a true three-dimensional model of a swimmer hand seemed to be an important step to the convergence between the experimental and the computational data. Secondly, it was possible to vary the thumb position and to investigate the effect on the CD and CL produced by the swimmer hand. Nevertheless, this line of research must be improved considering the unsteady effects of motion, such as accelerations, decelerations and rotation of the propelling segments. Indeed, Sanders (1999), Berger et al., 1999 and Rouboa et al., 2006 showed that unsteady and steady motion can lead to different results, concluding that the unsteady effects should be considered when seeking accurate estimates of forces in swimming. Hence, the effect of the thumb position on the hydrodynamic characteristics of the swimmer hand must be further investigated performing time-dependent numerical analysis with user-defined functions and moving meshe.
Conclusion
The position with the thumb adducted presented slightly higher values of drag coefficient when compared with the positions with the thumb abducted (although values were very similar). Moreover, the position with the thumb fully abducted allowed increasing the lift coefficient of the hand at angles of attack of 0° and 45°. At an angle of attack of 90° the values of lift coefficient were identical irrespective of the thumb position.
The combination of drag and lift coefficient (resultant force coefficient) showed that the position with the thumb fully abducted presented higher values than the positions with the thumb partially abducted and adducted at angles of attack of 0° and 45°. However, at an angle of attack of 90° the position with the thumb adducted presented the highest value of resultant force coefficient. These results suggested that for hand positions in which the lift force can play an important role the abduction of the thumb may be benefic whereas at higher angles of attack, in which the drag force is dominant, the adduction of the thumb may be preferable for swimmers.
Figure 6.
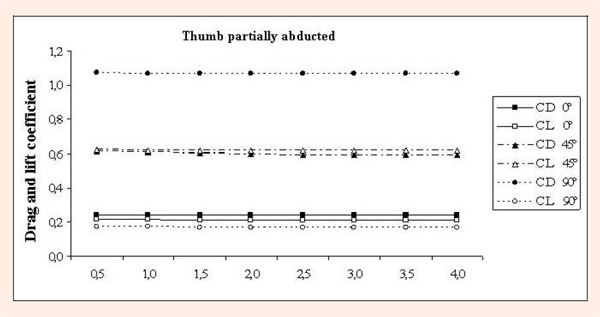
Drag and lift coefficients vs. flow velocity for each angle of attack in the position with the thumb partially abducted.
Figure 7.
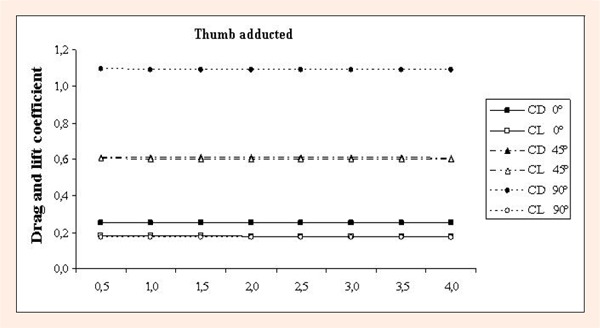
Drag and lift coefficients vs. flow velocity for each angle of attack in the position with the thumb adducted.
Figure 9.
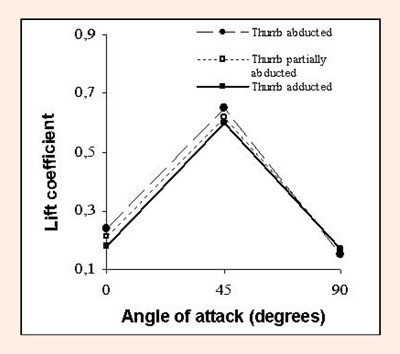
Values of lift coefficient obtained for the different angles of attack and for the different thumb positions. Sweepback angle = 0° and flow velocity = 2.0 m·s-1.



Acknowledgments
This work was supported by the Portuguese Government by Grants of the Science and Technology Foundation (SFRH/BD/25241/2005; POCTI/DES/58872/2004).
We would like to acknowledge the staff of the Radiology Department of Hospital de São João, in Porto, Portugal, and personally to the Department Director, Professor Isabel Ramos for the important contributes. We would also like to express our gratitude to the Med Mat Innovation Company, in Maia, Portugal, especially to the Professor José Domingos Santos and the Engineer Bruno Sá for their contributes.
Biographies

Daniel A. Marinho
Employment
Assistant Professor at the Department of Sport Sciences of the University of Beira Interior, Portugal.
Degree
PhD
Research interests
Biomechanical and physiological determinant factors of the sports performance, specially the swimming performance.
E-mail: dmarinho@ubi.pt
Abel I. Rouboa
Employment
Associated Professor at the Engineering Department of the University of Trás-os-Montes and Alto Douro, Portugal.
Degree
PhD
Research interests
Applied mathematics, parallel computation and biomechanics, namely, applied on sport and biomedical domains.
E-mail: rouboa@utad.pt

Francisco B. Alves
Employment
Associated Professor at the Faculty of Human Kinetics of the Technical University of Lisbon, Portugal.
Degree
PhD
Research interests
Biomechanical and physiological determinants of swimming economy and the evaluation of the training process.
E-mail: falves@fmh.utl.pt

João P. Vilas-Boas
Employment
Full Professor at the Faculty of Sport of the University of Porto, Portugal.
Degree
PhD
Research interests
Swimming biomechanics and bioenergetics.
E-mail: jpvb@fade.up.pt

Leandro Machado
Employment
Associated Professor at the Faculty of Sport of the University of Porto, Portugal.
Degree
PhD
Research interests
Sports biomechanics.
E-mail: lmachado@fade.up.pt
Victor M. Reis
Employment
Associated Professor at the Sport Sciences Department of the University of Trás-os-Montes and Alto Douro, Portugal.
Degree
PhD
Research interests
Physiological and biomechanical indicators of energy cost during physical activities.
E-mail: vreis@utad.pt
António J. Silva
Employment
Associated Professor at the Sport Sciences Department of the University of Trás-os-Montes and Alto Douro, Portugal.
Degree
PhD
Research interests
Physiological and biomechanical indicators of energy cost during physical activities, namely in swimming.
E-mail: ajsilva@utad.pt
APPENDIX
The numerical simulation techniques methodology consists of a mathematical model applied to the fluid flow in a given domain that replaces the complex Navier-Stokes fluid flow equations with discretized algebraic expressions. These equations can be solved by iterative calculations. The Fluent® code was used to develop and solve these equations using the finite volume approach, where the equations are integrated over each control volume. Accordingly, the continuity equation, the momentum conservation equations and the turbulent and dissipated energy (k-ε) conservation equations (for an incompressible fluid in Cartesian coordinates) were written in a conservative form as:
div.V = 0 (3)
Where k is the turbulent kinetic energy and e is the turbulent kinetic energy dissipation ratio. Vx, Vy and Vz represent the x, y and z components of the V. μt is the turbulent viscosity and ρ represents the fluid density. υ is the kinematic viscosity, Φ is the pressure strain, C2, Cμ, σe and σk are model constants, 1.92, 0.09, 1.30 and 1.00, respectively (Silva et al., 2008).
References
- 1.Alves F., Marinho D., Leal L., Rouboa A., Silva A. (2007) 3-D computational fluid dynamics of the hand and forearm in swimming. Medicine and Science in Sports and Exercise 39(Suppl. 1), S9 [Google Scholar]
- 2.Aritan S., Dabnichki P., Bartlett R. (1997) Program for generation of three-dimensional finite element mesh form magnetic resonance imaging scans of human limbs. Medical Engineering and Physics 19(8), 681-689 [DOI] [PubMed] [Google Scholar]
- 3.Berger M.A., de Groot G., Hollander A.P. (1995) Hydrodynamic drag and lift forces on human hand arm models. Journal of Biomechanics 28(2), 125-133 [DOI] [PubMed] [Google Scholar]
- 4.Berger M.A., de Groot G., Hollander A.P. (1997) Influence of hand shape on force generation during swimming. : Proceedings of the XII FINA World Congress on Sports Medicine. Eds: Eriksson B.O., Gullstrand L.Goteborg: Chalmers Reproservice; 389-396 [Google Scholar]
- 5.Berger M.A., Hollander A.P., de Groot G. (1999) Determining propulsive force in front crawl swimming: a comparison of two methods. Journal of Sports Sciences 117, 97-105 [DOI] [PubMed] [Google Scholar]
- 6.Bixler B.S., Riewald S. (2002) Analysis of swimmer’s hand and arm in steady flow conditions using computational fluid dynamics. Journal of Biomechanics, 35, 713-717 [DOI] [PubMed] [Google Scholar]
- 7.Bixler B.S., Schloder M. (1996) Computational fluid dynamics: an analytical tool for the 21st century swimming scientist. Journal of Swimming Research 11, 4-22 [Google Scholar]
- 8.Boulding N., Yim S.S., Keshavarz-Moore E., Ayazi Shamlou P., Berry M. (2002) Ultra scaledown to predict filtering centrifugation of secreted antibody fragments from fungal broth. Biotechnology and Bioengineering 79(4), 381-388 [DOI] [PubMed] [Google Scholar]
- 9.Candalai R.S., Reddy N.P. (1992) Stress distribution in a physical buttock model: effect of simulated bone geometry. Journal of Biomechanics, 15, 493-504 [DOI] [PubMed] [Google Scholar]
- 10.Colwin C.M. (1992) Swimming into the 21st century. Leisure Press, Illinois [Google Scholar]
- 11.Dabnichki P., Avital E. (2006) Influence of the position of crew members on aerodynamics performance of two-man bobsleigh. Journal of Biomechanics 39(15), 2733-2742 [DOI] [PubMed] [Google Scholar]
- 12.Gardano P., Dabnichki P. (2006) On hydrodynamics of drag and lift of the human arm. Journal of Biomechanics 39, 2767-2773 [DOI] [PubMed] [Google Scholar]
- 13.Guerra D., Ricciardi L., Laborde J.C., Domenech S. (2007) Predicting gaseous pollutant dispersion around a workplace. Journal of Occupational and Environmental Hygiene 4(8), 619-633 [DOI] [PubMed] [Google Scholar]
- 14.Kellar W.P., Pearse S.R.G., Savill A.M. (1999) Formula 1 car wheel aerodynamics. Sports Engineering 2(4), 203-212 [Google Scholar]
- 15.Lauder M., Dabnichki P., Bartlett R. (2001) Improved accuracy and reliability of sweepback angle, pitch angle and hand velocity calculations in swimming. Journal of Biomechanics, 34, 31-39 [DOI] [PubMed] [Google Scholar]
- 16.Lauder M., Dabnichki P., Bartlett R. (2001) Improved accuracy and reliability of sweepback angle, pitch angle and hand velocity calculations in swimming. Journal of Biomechanics 34, 31-39 [DOI] [PubMed] [Google Scholar]
- 17.Lecrivain G., Slaouti A., Payton C., Kennedy I. (2008) Using reverse engineering and computational fluid dynamics to investigate a lower arm amputee swimmer’s performance. Journal of Biomechanics, 41, 2855-2859 [DOI] [PubMed] [Google Scholar]
- 18.Marinho D.A., Reis V.M., Alves F.B., Vilas-Boas J.P., Machado L., Silva A.J., Rouboa A.I. (2008a) The hydrodynamic drag during gliding in swimming. Journal of Applied Biomechanics, in press [DOI] [PubMed]
- 19.Marinho D.A., Reis V.M., Vilas-Boas J.P., Alves F.B., Machado L., Rouboa A.I., Silva A.J. (2008b) Design of a three-dimensional hand/forearm model to apply Computational Fluid Dynamics. Brazilian Archives of Biology and Technology, in press
- 20.Marinho D.A., Rouboa A.I., Silva A.J. (2009a) The study of swimmer’s hand and forearm using Computational Fluid Dynamics. Science et Sports, in press
- 21.Marinho D.A., Barbosa T.M., Reis V.M., Kjendlie P.L., Alves F.B., Vilas-Boas J.P., Machado L., Silva A.J, Rouboa A.I. (2009b) Swimming propulsion forces are enhanced by a small finger spread. Journal of Applied Biomechanics, in press [DOI] [PubMed]
- 22.Marshall I., Zhao S., Papathanasopoulou P., Hoskins P., Xui Y. (2004) MRI and CFD studies of pulsatile flow in healthy and stenosed carotid bifurcation models. Journal of Biomechanics 37, 679-687 [DOI] [PubMed] [Google Scholar]
- 23.Moreira A., Rouboa A., Silva A.J., Sousa L., Marinho D., Alves F., Reis V., Vilas-Boas J.P., Carneiro A., Machado L. (2006) Computational analysis of the turbulent flow around a cylinder. Portuguese Journal of Sport Sciences 6(Suppl. 1), 105 [Google Scholar]
- 24.Pallis J.M., Banks D.W., Okamoto K.K. (2000) 3D computational fluid dynamics in competitive sail, yatch and windsurfer design. : The Engineering of Sport: Research, Development and Innovation. Eds: Subic F., Haake M.Oxford: Blackwell Science; 75-79 [Google Scholar]
- 25.Rouboa A, Silva A., Leal L., Rocha J., Alves F. (2006) The effect of swimmer’s hand/forearm acceleration on propulsive forces generation using Computational Fluid Dynamics. Journal of Biomechanics 39(7), 1239-1248 [DOI] [PubMed] [Google Scholar]
- 26.Sanders R.H. (1997) Hydrodynamic characteristics of a swimmer hand with adducted thumb: implications for technique. : Proceedings of the XII FINA World Congress on Sports Medicine. Eds: Eriksson B.O., Gullstrand L.Goteborg: Chalmers Reproservice; 429-434 [Google Scholar]
- 27.Sanders R.H. (1999) Hydrodynamic characteristics of a swimmer’s hand. Journal of Applied Biomechanics 15, 3-26 [Google Scholar]
- 28.Schleihauf R.E. (1979) A hydrodynamic analysis of swimming propulsion. : Swimming III. Eds: Terauds J., Bedingfield E.W.Baltimore: University Park Press; 70-109 [Google Scholar]
- 29.Silva A., Rouboa A., Leal L., Rocha J., Alves F., Moreira A., Reis V., Vilas-Boas J.P. (2005) Measurement of swimmer’s hand/forearm propulsive forces generation using computational fluid dynamics. Portuguese Journal of Sport Sciences 5(3), 288-297 (In Portuguese: English abstract). [Google Scholar]
- 30.Silva A.J., Rouboa A., Moreira A., Reis V.M., Alves F., Vilas-Boas J.P., Marinho D.A. (2008) Analysis of drafting effects in swimming using computational fluid dynamics. Journal of Sports Science and Medicine 77(1), 60-66 [PMC free article] [PubMed] [Google Scholar]
- 31.Takagi H., Shimizu Y., Kurashima A., Sanders R. (2001) Effect of thumb abduction and adduction on hydrodynamic characteristics of a model of the human hand. : Proceedings of Swim Sessions of the XIX International Symposium on Biomechanics in Sports. Eds: Blackwell J., Sanders R.San Francisco: University of San Francisco; 122-126 [Google Scholar]
- 32.Wood T.C. (1977) A fluid dynamic analysis of the propulsive potential of the hand and forearm in swimming. Master of Science Thesis, Dalhouise University Press, Halifax, NS [Google Scholar]
- 33.Zaidi H., Taiar R., Fohanno S., Polidori G. (2008) Analysis of the effect of swimmer’s head position on swimming performance using computational fluid dynamics. Journal of Biomechanics 41, 1350-1358 [DOI] [PubMed] [Google Scholar]